1. Introduction
This study presents a variation of the hybrid block methods (HBMs) for integrating systems of initial value problems of the first order (IVPs). It is now well established that HBMs are effective at solving IVPs that may or may not be stiff. Researchers are now concentrating on enhancing these approaches to increase their efficacy and extend them to other forms of differential equations, such as boundary value problems. Several authors have developed optimised hybrid block methods in recent years by selecting intra-step points that minimise the local truncation error of one or more of the formulas in the set of hybrid block methods (see, for instance, [
1,
2,
3,
4,
5]). The hybrid block methods were applied with an adaptive strategy in [
6,
7] in an effort to increase their efficiency and circumvent the difficulties associated with short step sizes. Other researchers (see [
8,
9]) have implemented the optimised hybrid block methods in nonlinear partial differential equations using cubic spline basis functions. In this study, the hybrid block method is modified by overlapping adjacent integration blocks at the last intra-step point. This adjustment produces a
-stable version with a truncation error at least
O(
h) greater than the comparable HBM without overlap.
The performance of the proposed overlapping HBM is tested utilising an error analysis of numerically challenging solutions to different nonlinear IVPs. In order to determine the approach’s robustness, it is also evaluated on IVPs with extreme stiffness.
The remainder of this paper is organised into four sections. The derivation of the overlapping hybrid block methods is covered in
Section 2.
Section 3 examines the error and stability properties of the proposed method.
Section 4 presents the experimental and numerical results, and
Section 5 provides a summary and conclusion.
2. Derivation of the Method
Consider the initial value problem defined on
by
where
is a general, continuous nonlinear function.
Let
h be a prescribed step size on a mesh
I defined by
We choose
collocation points, defined by
in the first interval
. For the intervals,
, where
, we choose
collocation points:
The parameters
are called collocation parameters, and they satisfy the condition
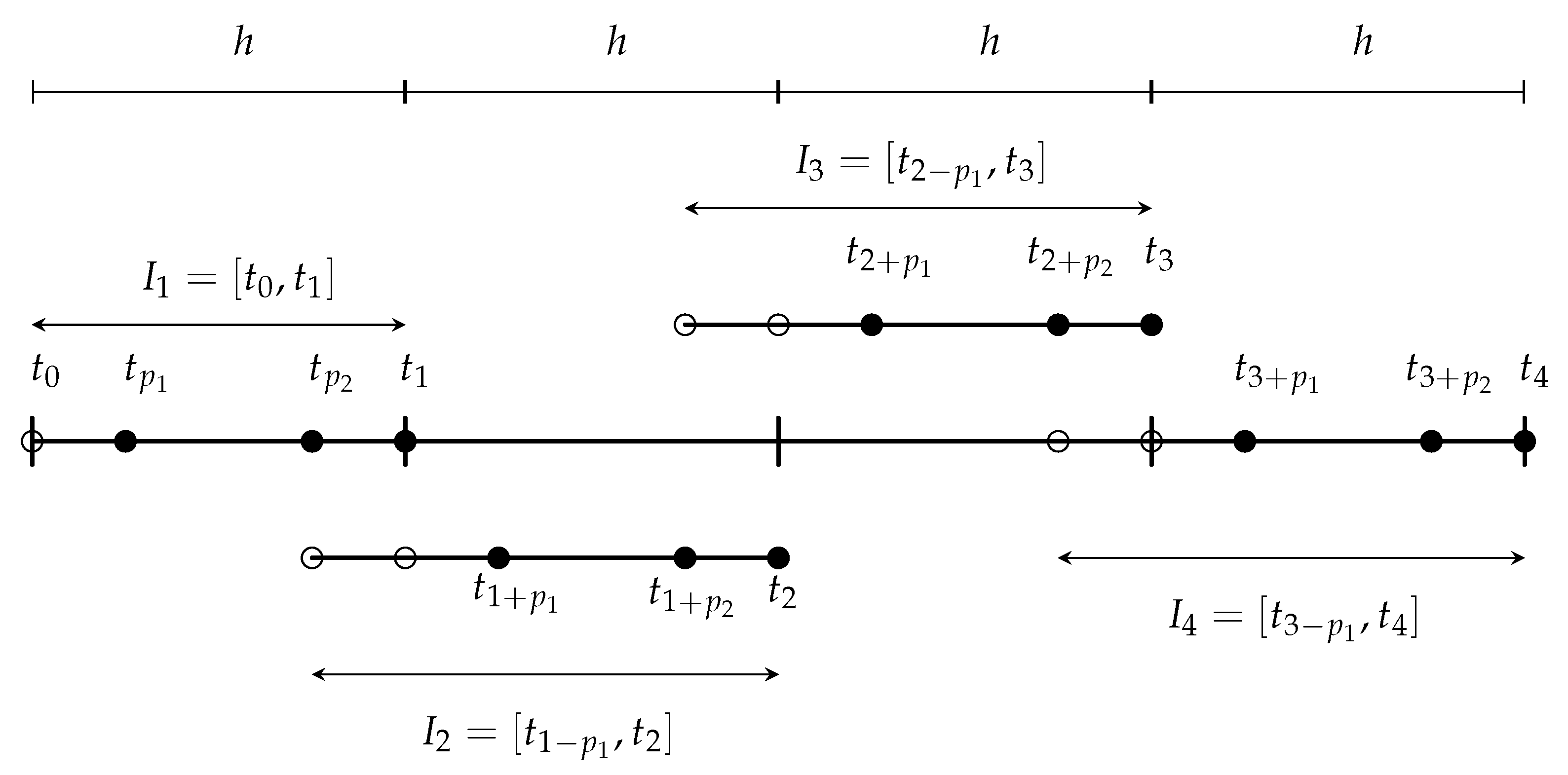
An illustrative representation of the grid is shown in
Figure 1, for the special case when
and
. It is worth noting that, for
, the grid
overlaps with one grid point (
) from the previous grid
. For this reason, the method will be referred to as the overlapping hybrid block method.
In the non-overlapping block
, we suppose that the solution can be approximated by the polynomial:
that satisfies the collocation conditions:
By the Lagrange interpolation formula, the function
can be approximated as
where
Using the collocation Equation (
3), we obtain
which is integrated from 0 to
to give
where
The matrix form of (
6) is
where
and
In the block
(
), we consider the collocation parameters
and assume the following collocation conditions:
for
. By the Lagrange interpolation formula, the function
can be approximated as
Integrating from 0 to
gives
where
Equation (
10) can be written in matrix form as
where
4. Numerical Experimentation and Results
In this section, we implement the proposed overlapping hybrid block method to generate numerical solutions for problems that are typically difficult to solve numerically using standard methods. Before employing the hybrid block approach to integrate the nonlinear IVPs, they are first linearized. For a general nonlinear system of first-order IVPs, the linearisation method is detailed below.
Consider the system of
s nonlinear first-order IVPs of the form
where
is the coefficient of the state variable
, and
is the component of the
k-th equation that is not linear in
, for
. The hybrid block method is sequentially applied iteratively to each equation in the system (
25), with the solution of the
k-th equation used immediately when solving the
th equation. Consequently, the iterative scheme is developed as
This linearization method employs the Gauss–Seidel method for decoupling and solving large systems of nonlinear equations. The method has been adapted from the waveform relaxation method that has been reported in the literature (see, for example, [
12,
13]).
Noting that (
26) is linear, it can be applied to the HBM method after setting
where
and
are known functions of
t. As a result, the matrix form of the HBM, (
11), becomes
or
where
All numerical examples in this study were solved using (
28) applied iteratively over 20 iterations for each integration block
. Through numerical experimentation, it was determined that sufficient convergence would have occurred prior to the 20th iteration level. All numerical results presented in this study were generated by iterating the scheme (
28) up to
for all
n values. In light of the linearisation of nonlinear IVPs via partitioning, the hybrid block method defined by (
28) is referred to as the linear partitioning overlapping hybrid block method. The method is computationally efficient and easy to implement. Due to the lack of derivatives and Jacobian matrices, it circumvents the challenges of Newton-based iterative techniques that rely on derivatives.
In the examples, given below, the linear partitioning overlapping hybrid block method was applied using equally spaced and the shifted Legendre-based optimal intra-step points. In both cases,
and
were used for illustrative purposes. The intra-step points corresponding to these values of
m are given in
Table 2 below.
Using
as an example, the matrix parameters for the optimal overlapping hybrid block approach are as follows:
which is applied on the scheme:
in the first interval
and
which is applied in
, for the overlapping hybrid block scheme:
for
. The proposed overlapping grid approach is referred to as the overlapping optimal hybrid block method (OOHBM) for the purposes of this paper. The original optimal hybrid block method (OHBM), without overlap, is constructed by applying Equation (
29) to all the integration blocks
for
. It is important to note that the size of the matrices in both the original HBM scheme and the overlapping HBM scheme is the same. This indicates that the computational effort necessary to solve the IVPs will be roughly equivalent for both methods.
4.1. Example 1
Consider the following example that belongs to the class of problems with the so-called Runge phenomenon:
The exact solution of Example (
31) is
. In this example, the linear partitioning iterative method with
was used with the HBM schemes to solve (
31) using
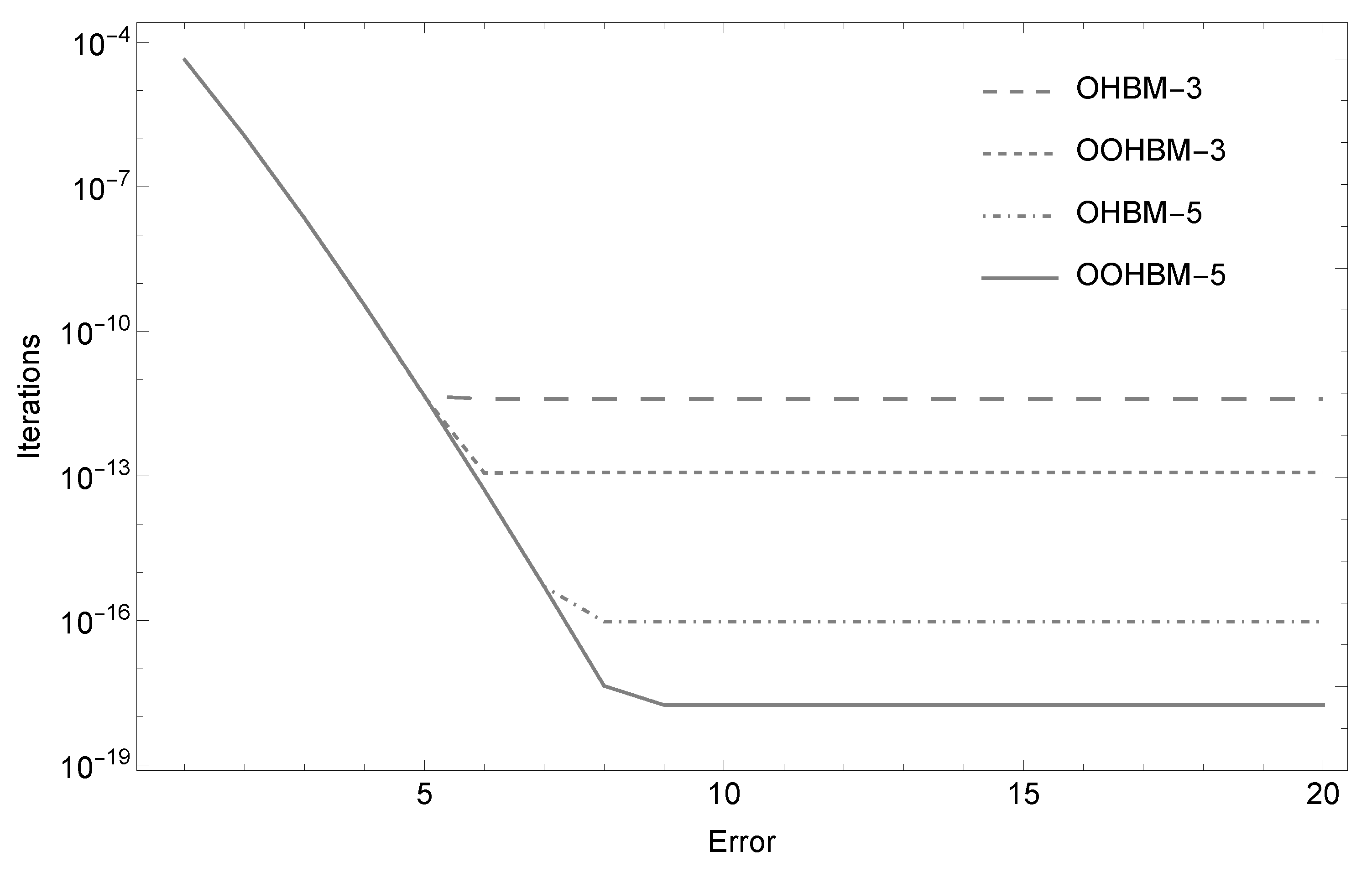
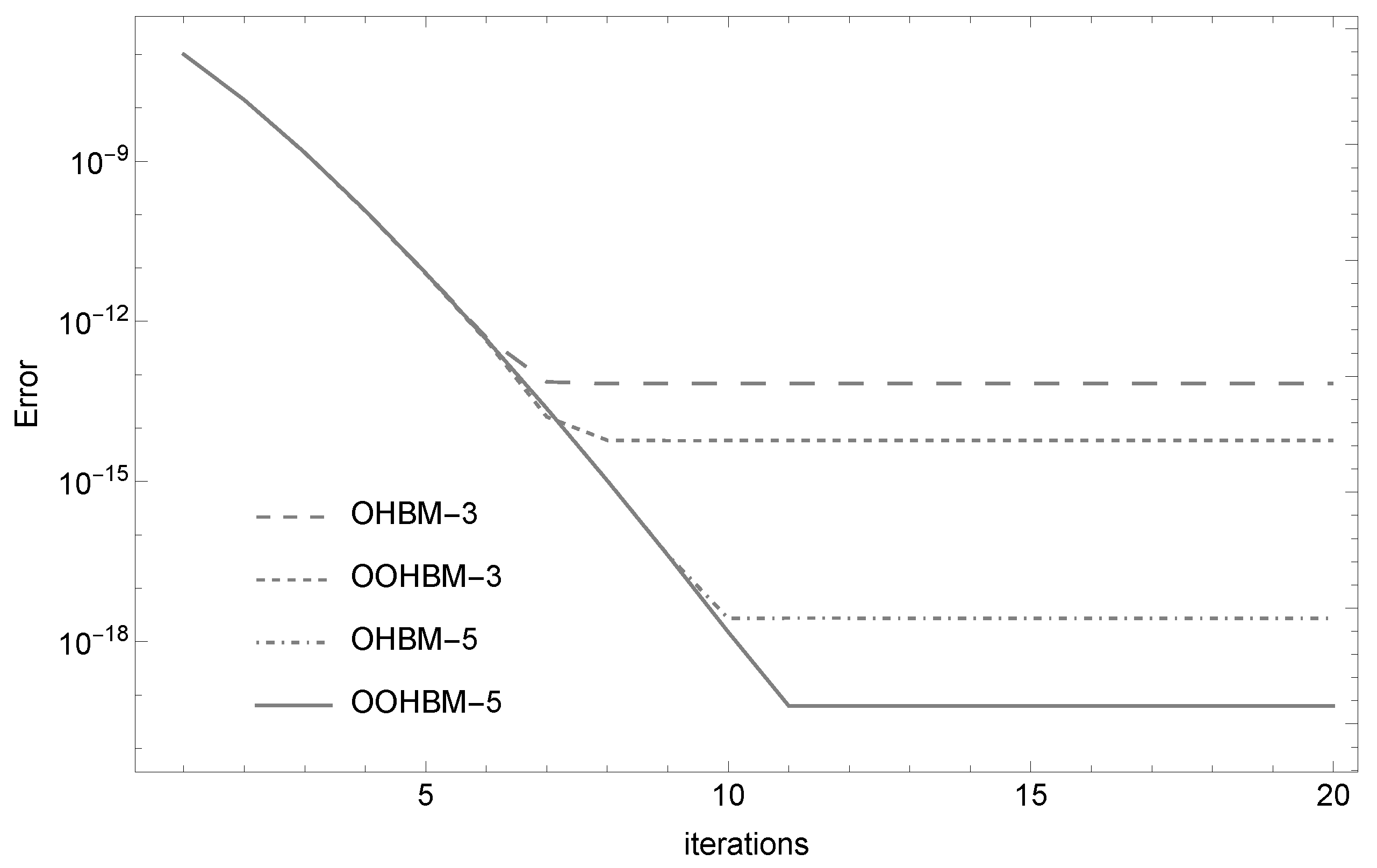
and up to 20 iterations, within the integration domain [0,1]. The convergence plot, computed as the maximum error per iteration in the last block
, is shown in
Figure 3. The convergence of the optimal overlapping (OOHBM) and the original optimal hybrid block technique (OHBM) with no overlapping grid for
and
are compared. The graph demonstrates that the overlapping HBM plateaus at a higher degree of accuracy than the non-overlapping HBM. This is one indicator of the overlapping HBM’s higher precision. It is also apparent from
Figure 3 that the linear partitioning HBM converges swiftly, with full convergence reached within 10 iterations for all HBM variants evaluated in this scenario.
A comparison of the maximum absolute errors, computed from the exact solution, is displayed in
Table 3. It can be seen from the table that the maximum error improves when the overlapping grid is applied. In this example, the improvement in the maximum error when comparing equally spaced and optimal hybrid block methods is not as significant as the difference between the original and proposed overlapping HBM. It can also be observed that the maximum error obtained using the overlapping HBM with equally spaced points is greater than the error of the original optimal HBM, for both
and
. This appears to indicate that introducing grid overlap into HBM systems reduces the maximum error more than adjusting the type of intra-step points.
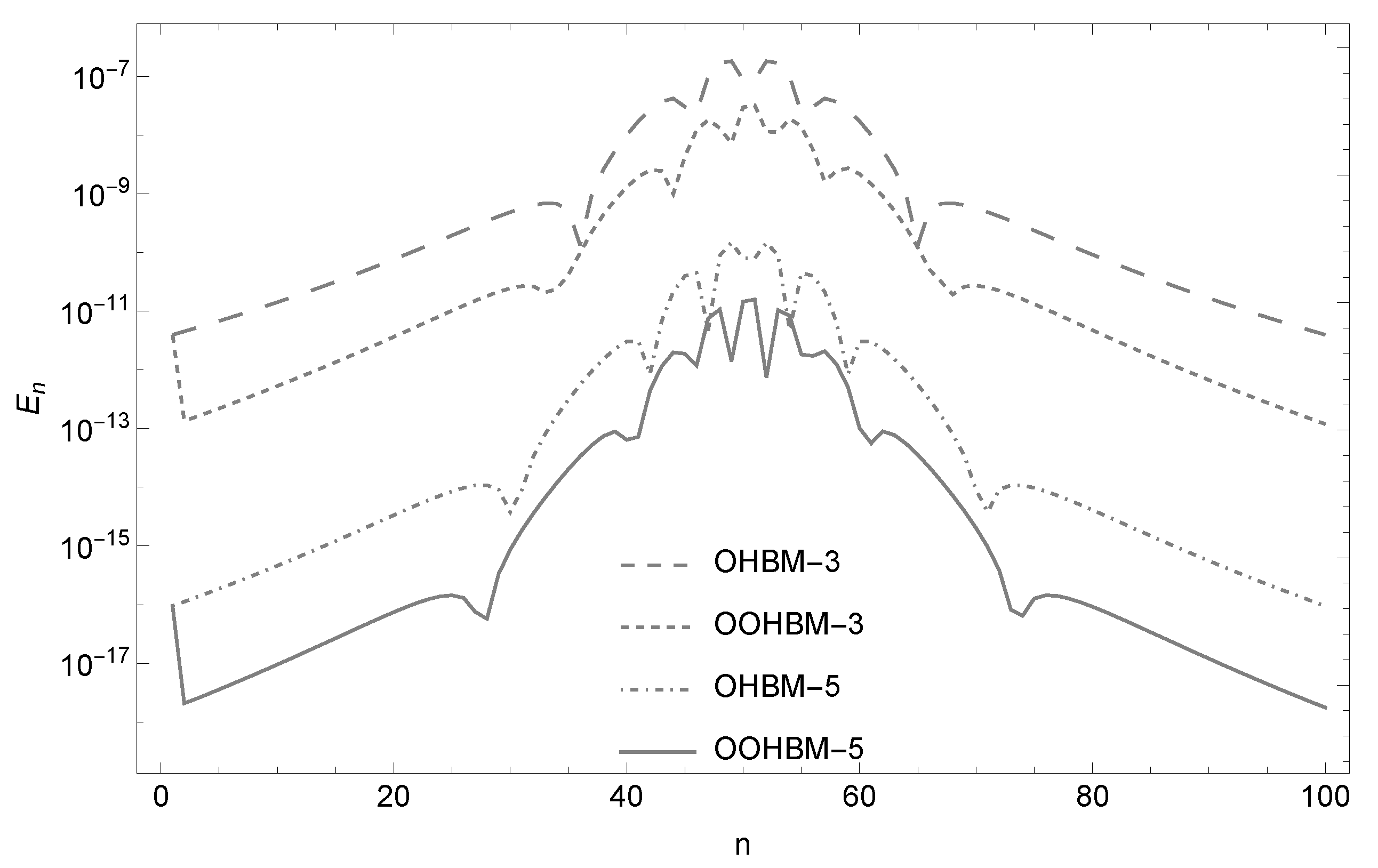
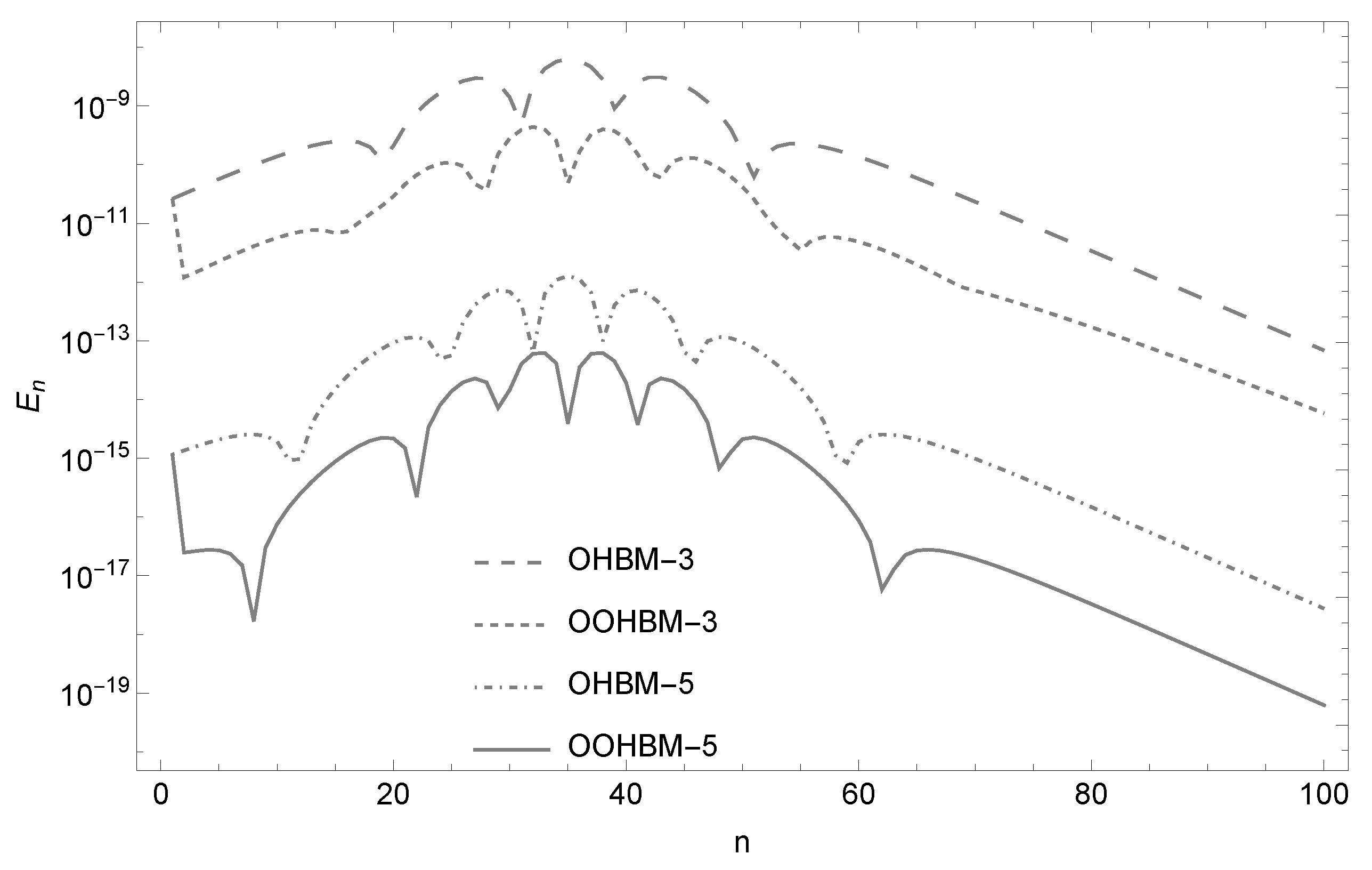
The maximum error in each block
is defined as
Plotting the profile of the maximum error in each block for
reveals the distribution of the error as it traverses the complete domain of integration.
Figure 4 depicts the maximum error profile
for 100 intervals (blocks) used during the deployment of the overlapping optimal HBM and original optimal HBM to Example
31. The graph illustrates the significant reduction in the maximum error when the overlapping grid method is implemented. The maximum error begins in the same location when
. This is expected given that the initial interval is identical for both optimal overlapping (OOHBMs) and standard optimal non-overlapping HBMs (OHBMs). After
, the maximum errors of the OOHBM are less than those of the OHBM when
and when
. The reduction in the computed error is consistent with the theorems for local truncation errors derived in the preceding section, which demonstrates that the truncation error of the overlapping HBM is
more than that of the corresponding non-overlapping HBM.
4.2. Example 2
Consider the logistic equation:
with the exact solution
. The problem was integrated on
using a step size of
for the case when
.
Table 4 compares the maximum errors produced by the OOHBM versus the OHBM. Included also are the maximum errors of the corresponding hybrid block methods constructed using intra-step points equally spaced apart. The table clearly illustrates the increase in accuracy brought about by the introduction of overlapping in grids that use both equally spaced and optimal intra-step points.
Figure 5 provides a comparison of the convergence plots for the standard OHBM and the proposed OOHBM. The illustration demonstrates the speedy convergence of the linear partitioning iterative approach and the superior accuracy of the proposed OOHBM schemes in comparison to the OHBM schemes.
Figure 6 illustrates the maximum error profile
across all blocks as a function of the block index
n. The decrease in error shown in
Figure 6 when switching from the OHBM to the OOHBM is consistent with the pattern observed in
Figure 4 of the preceding case. This is additional proof that the concept of overlapping grids improves the accuracy of hybrid methods.
Next, we discuss the implementation of the overlapping HBM on systems of nonlinear equations that are notoriously difficult to numerically solve due to their stiff characteristics or their propensity to change rapidly over short time intervals.
4.3. Example 3
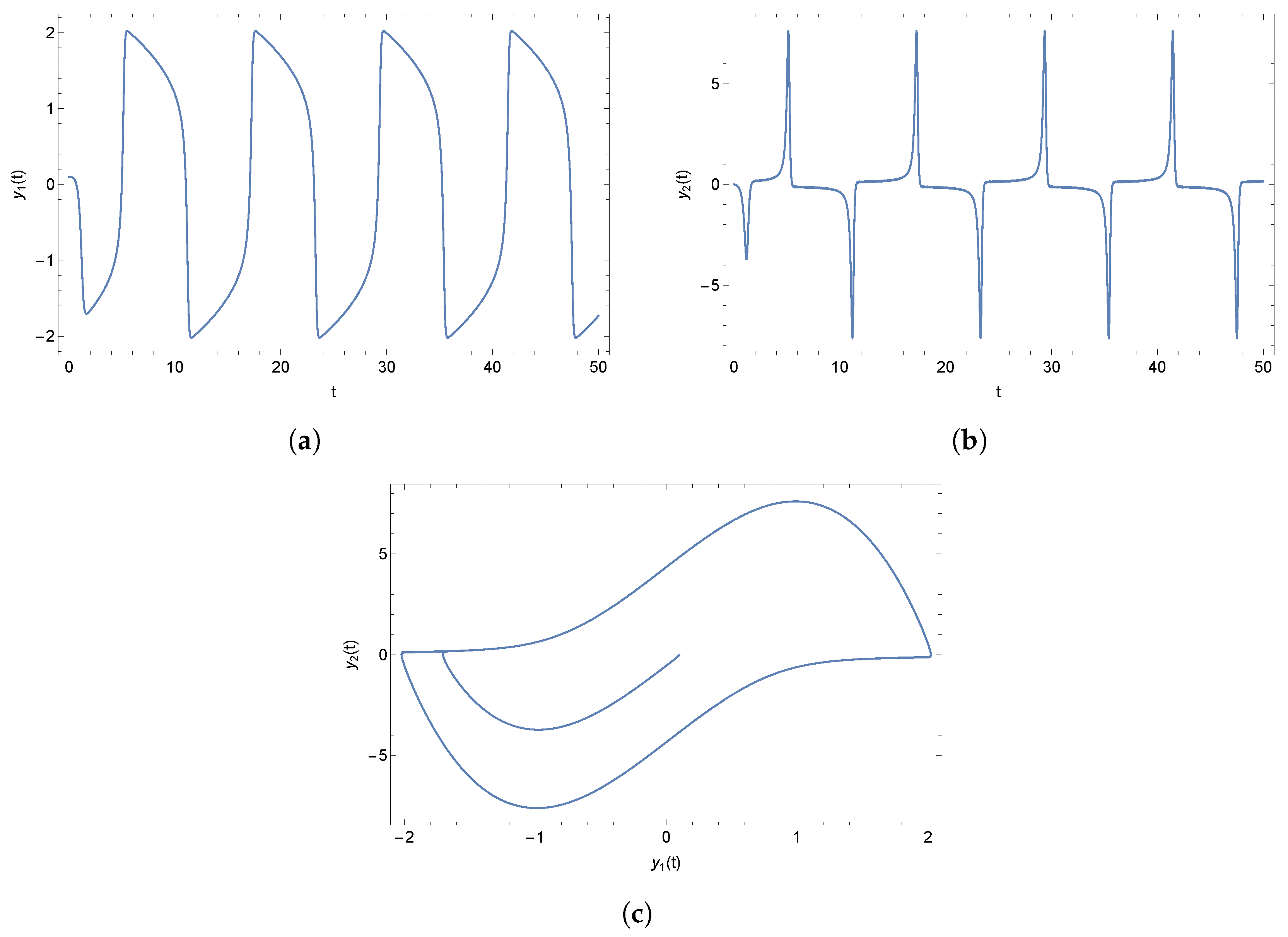
Consider the the van der Pol oscillator with nonlinear damping:
where
is a constant parameter. In this example, we set
This problem was solved using the OOHBM-3 with
in the domain of integration [0,50]. Since there is no analytic solution to the problem, we compared the results of the solution profiles to those that have been previously reported in the literature. In
Figure 7, the solution profiles and phase portrait for the van der Pol oscillator when
are depicted. Similar results have been reported in the literature using different numerical solution techniques (see, for example, [
14]).
4.4. Example 4
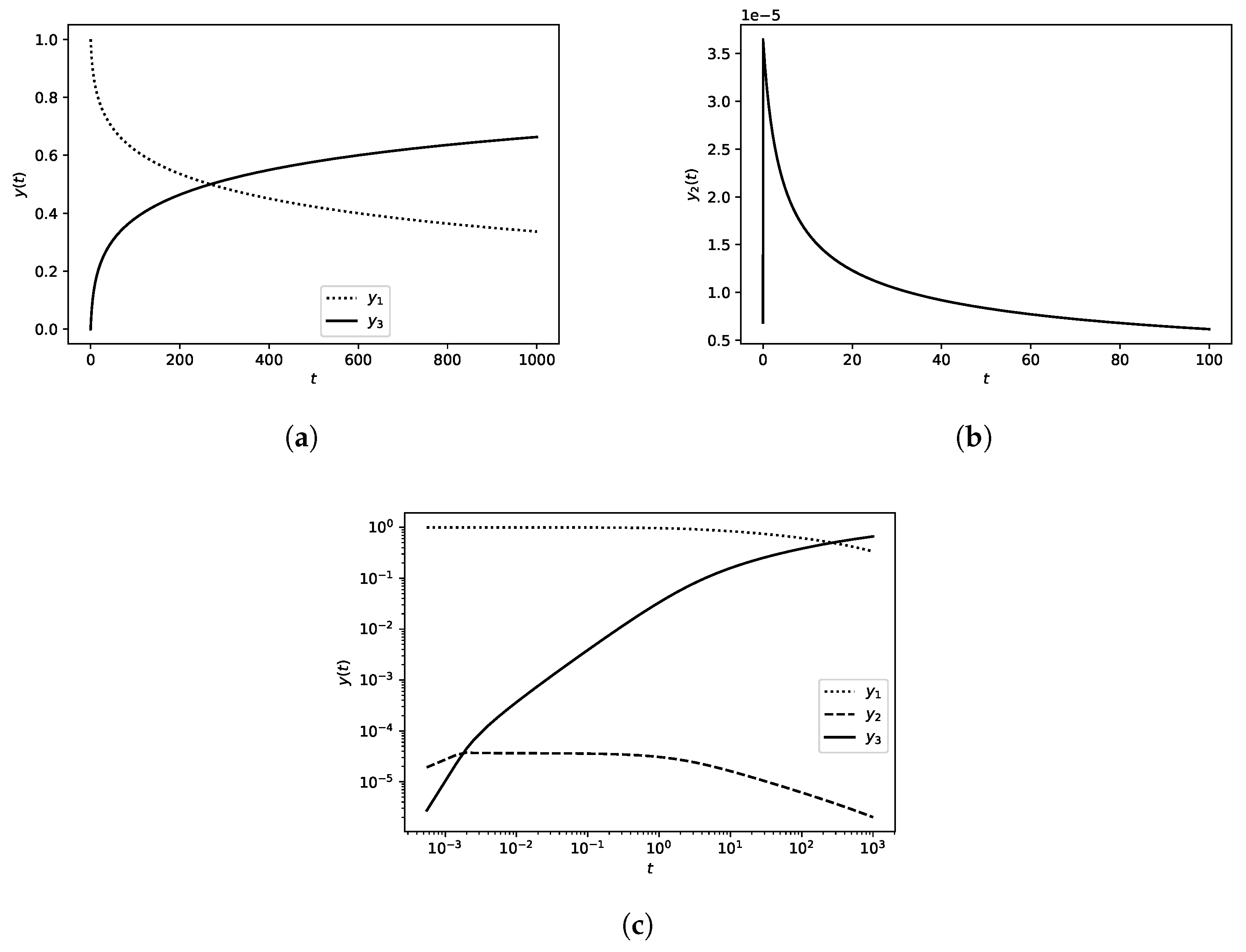
Consider the highly stiff system of IVPs below, which has applications in chemical kinetics [
15].
For specific values of the reaction constants, this problem becomes highly stiff and unsolvable using ordinary numerical approaches. In this study, we employed the values that were also used to assess the robustness of the extended backward difference methods described in [
16] and the implicit Runge–Kutta method as summarized in [
17]. Consequently, we set
Figure 8 depicts the solution profiles generated by OOHBM-3 with
. The nature of the solution profile for
provides insight into the numerical difficulties of solving this problem. Over a brief period of time, the concentration of
rises abruptly to a maximum and then falls sharply. Compared to the concentrations of
and
represented in
Figure 8a, the size of the concentration for
is less. Due to the widely different concentration amounts, the
plot on the
x-axis is used to compare all the concentration profiles over a longer period of time, as depicted in
Figure 8c. These profiles are comparable to those published in [
17].
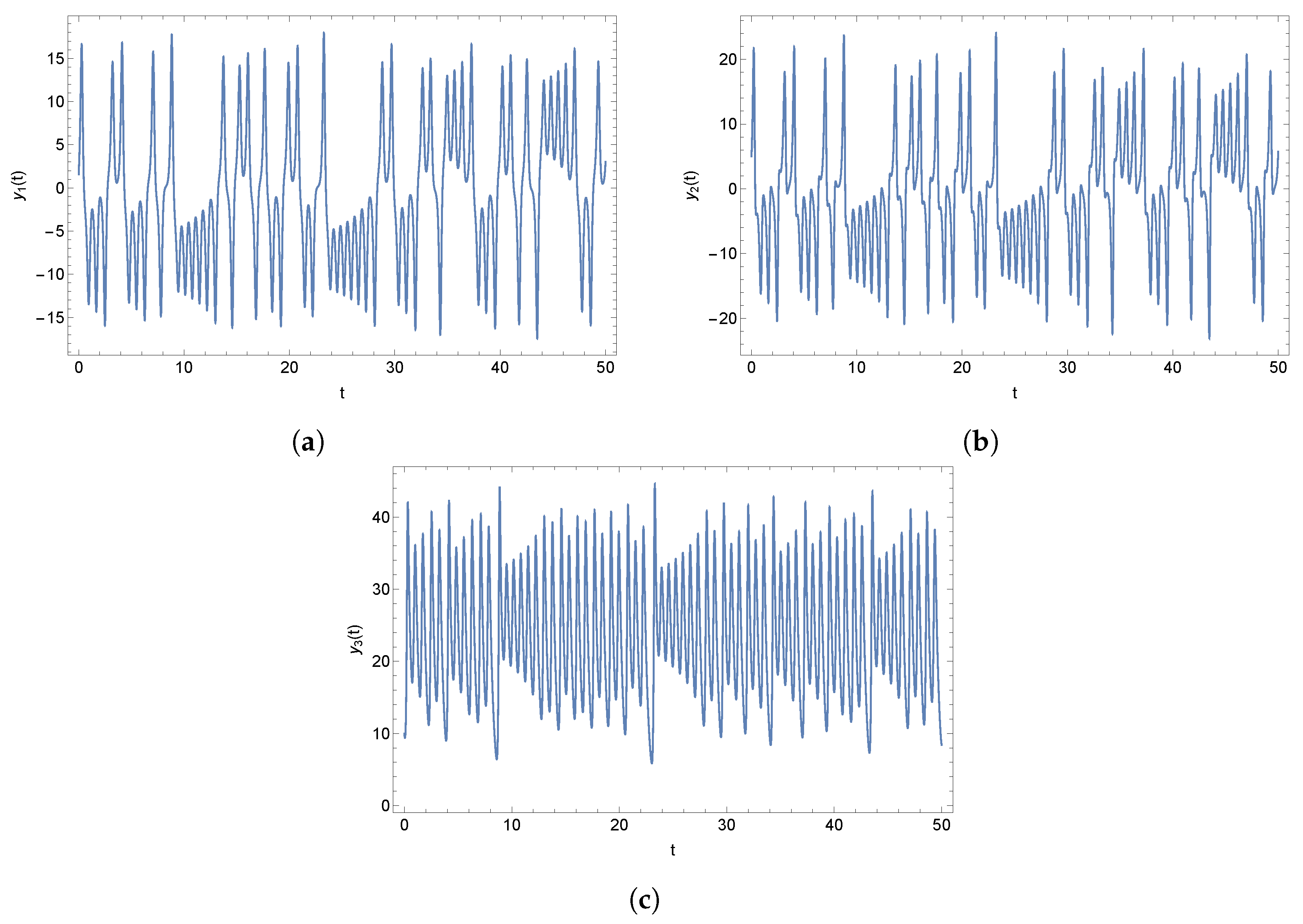
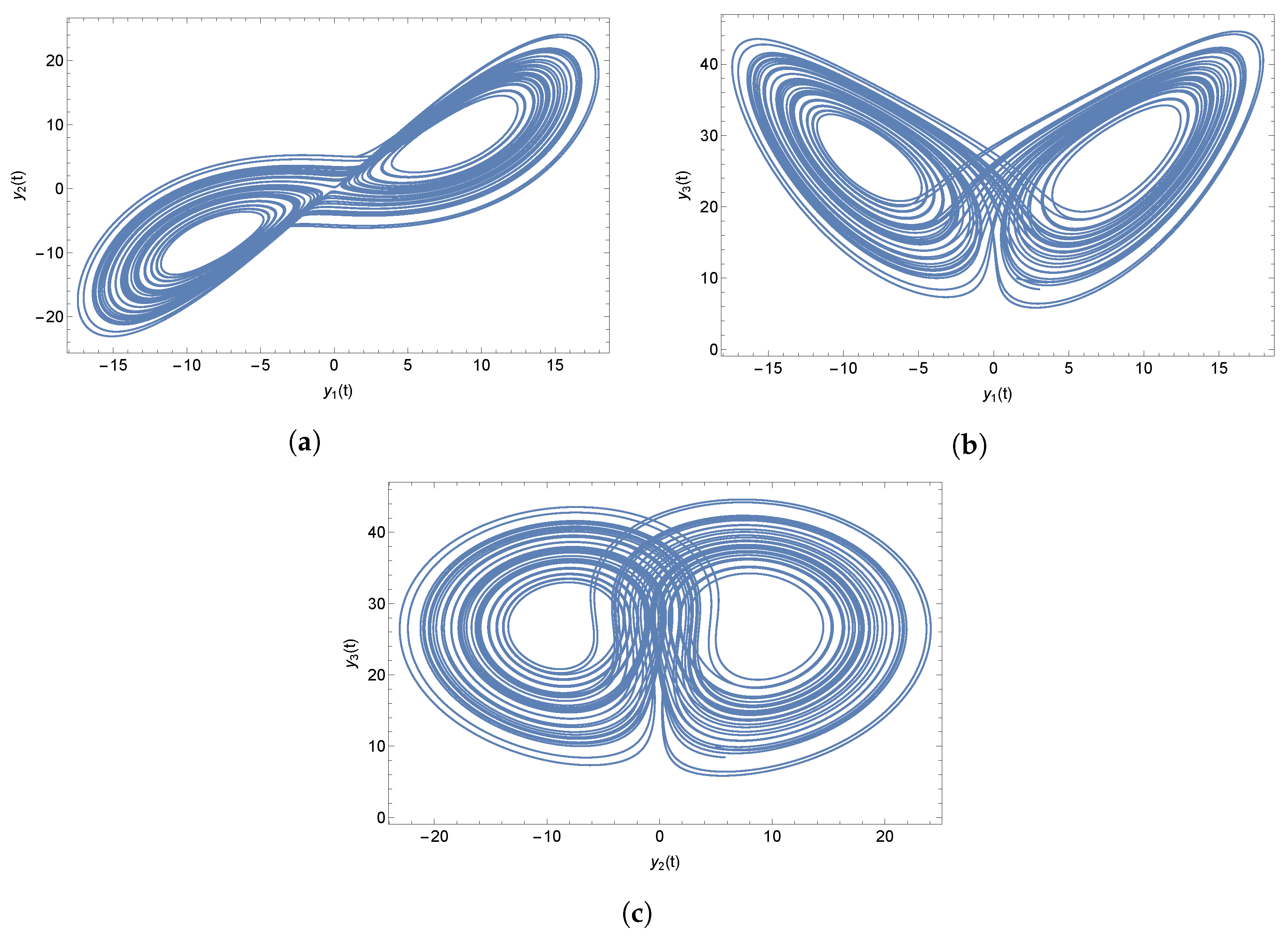
4.5. Example 5
Consider the Lorenz system [
18] given by
The constants are . With these selected constants, the Lorenz system exhibits chaotic behaviour, with the solution profiles fluctuating rapidly over extremely brief time intervals. To precisely and efficiently capture the solution, robust numerical approaches are necessary. The proposed overlapping HBM with the fewest intra-step points was employed to tackle this problem.
The parameters of the iteration scheme are given below.
In
Figure 9 and
Figure 10, respectively, the time series solutions and phase portraits for the Lorenz equation are displayed. These results were produced using OOHBM-3 with
across the integrating domain [0,50]. The results are identical to those reported in numerous publications on the Lorenz system’s solutions (see, for example, [
19]).
5. Conclusions
In this study, an enhancement to the conventional hybrid block methods for solving first-order equations was developed. This was accomplished by overlapping successive integration blocks after the first block. When executed on a variety of initial value problems, the resulting method, called the overlapping hybrid block method, demonstrated a significant gain in accuracy. In addition, theorems were established that demonstrate an improvement in local truncation error by an order of the step size, . It was also demonstrated that the proposed method is A-stable. These findings show that the concept of inserting overlapping blocks in hybrid block methods may be a profitable field of study. Further research is required to extend the applicability of the overlapping technique to other types of differential equations, such as boundary value problems, fractional-order differential equations, and differential-algebraic systems of equations (DAEs).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}