1. Introduction
Problem. Consider the problem of extracting a signal
from a noisy time series
, where
is governed by a linear recurrence relation (LRR) of order
r:
,
,
,
is noise with zero expectation and autocovariance matrix
. There is a well-known result that describes the set of time series governed by LRRs in parametric form:
, where
are polynomials in
n (see, e.g., ([
1], Theorem 3.1.1)). Methods based on the estimation of signal subspace (subspace-based methods), and in particular, singular spectrum analysis (see [
2,
3,
4]), work well for the analysis of such signals.
The subspace-based approach starts from fixing a window length
L,
, putting
and constructing the
L-trajectory matrix for a series
:
where
denotes the bijection between
and
;
is the set of Hankel matrices of size
with the equal values on the auxiliary diagonals
.
We say that the time series
is called a time series of rank
r, if its trajectory matrix
is rank-deficient and has rank
r for any
L,
. The equivalent definition of series of rank
r,
, is that
-trajectory matrix has rank
r ([
5], Corollary 5.1). Denote the set of time series of rank
r and length
N as
.
Consider the problem of approximating a time series by series of rank
r in a weighted Euclidean norm as the following non-linear weighted least-squares problem:
where
,
are time series of length
N and
is the weighted Euclidean norm generated by the inner product
is a symmetric positive-definite weight matrix and
is the closure of the set
.
The solution
of the problem (
1) can be used as a finite-rank estimate of the signal
. Moreover, the obtained estimate allows one to solve many related problems: estimating the LRR coefficients and time series parameters, forecasting the time series, filling in the gaps (if any) and so on. Note that when
, the resulting signal estimate
assuming Gaussian noise
is the maximum likelihood estimate.
Known solution. To solve the problem (
1), consider the related problem of structured low-rank approximation (SLRA; see a review in [
6]):
where
is the matrix norm generated by the inner product described in [
7]:
is the space of Hankel matrices of size
;
is the set of matrices of rank not larger than
r;
and
are positive-definite matrices; and
and
are the matrices related to (
1) as
and
. Then, the estimate of the signal
is
.
There exists a relation between the weight matrix
and the matrices
and
that provides the equivalence of the problems (
1) and (
3) [
8] and thereby the coincidence of the corresponding signal estimates.
The algorithm for the numerical solution of the Hankel SLRA problem (
3) is the Cadzow iterative method (introduced in [
9]; see also [
4]), which belongs to the class of alternating projection methods [
10]. Let us define the following sequence of matrices starting from a given matrix
:
where
and
are projectors on the corresponding sets in the matrix norm
generated by the inner product (
4). As a numerical solution we can take the value at
T-th iteration, that is,
, which can then be used as the initial value in local search methods, for example, in VPGN [
11] and MGN [
12] methods.
The problem of search of matrices
and
(let us call them “matrix weights” to differ from the weight matrix
) that would correspond to the matrix
is already known. The choice
is natural for a model with noise autocovariance matrix
and leads to the maximum likelihood estimation of the signal. For the case of autoregressive noise (and for white noise in particular), it is shown in [
8] that the equivalence of the problems (
1) and (
3) is possible, only if either the matrix
or
is degenerate; this is inappropriate when solving the problem with methods of the Cadzow type; see ([
13], Remark 4). Thereby, nondegenerate matrices
and
, which give a matrix
approximated by
, have to be used. The papers [
8,
14] are devoted to solving the problems of finding such matrices.
The problem to be solved is parameterized by a parameter
. Assume that the matrix
is fixed and the matrix
is subject to the following constraints:
is diagonal, and its condition number is bounded—say,
—that is,
is the parameter regulating conditionality. By decreasing
, we can achieve weights closer to the required weights of
, but this reduces the convergence rate of the Cadzow method (
5) [
13]. Accordingly, by choosing
close to or equal to 1, we get an iteration that converges faster, but the weights used are far from optimal, which leads to a loss of accuracy. The question arises:
is there a way to modify the Cadzow iterations to obtain both fast convergence and high accuracy?Proposed approach. We propose to consider “mixed Cadzow iterations” defined in the following way:
where
and
set the number of iterations performed with matrix weights
and
, respectively. The approach is to use different weights
and
that correspond to different
to achieve an estimate of the signal that would be both sufficiently accurate and at the same time rapidly computable.
Main results. The main result consists of two parts. Theorem 2 contains the limit properties of (
6) in the general case of alternating projections. Theorem 6, which is its corollary, is used to justify the proposed algorithm with mixed alternating projections for solving the problem (
3).
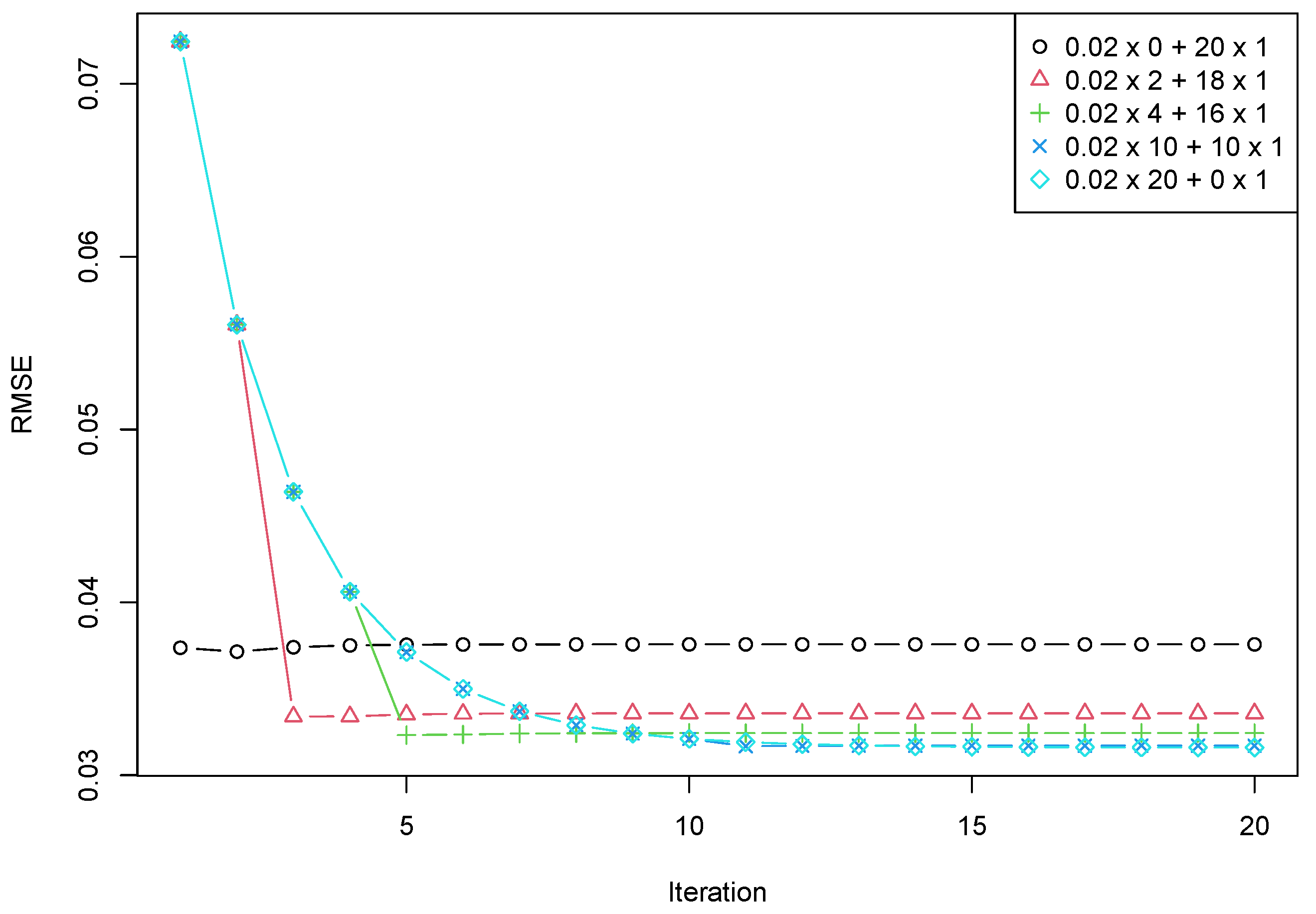
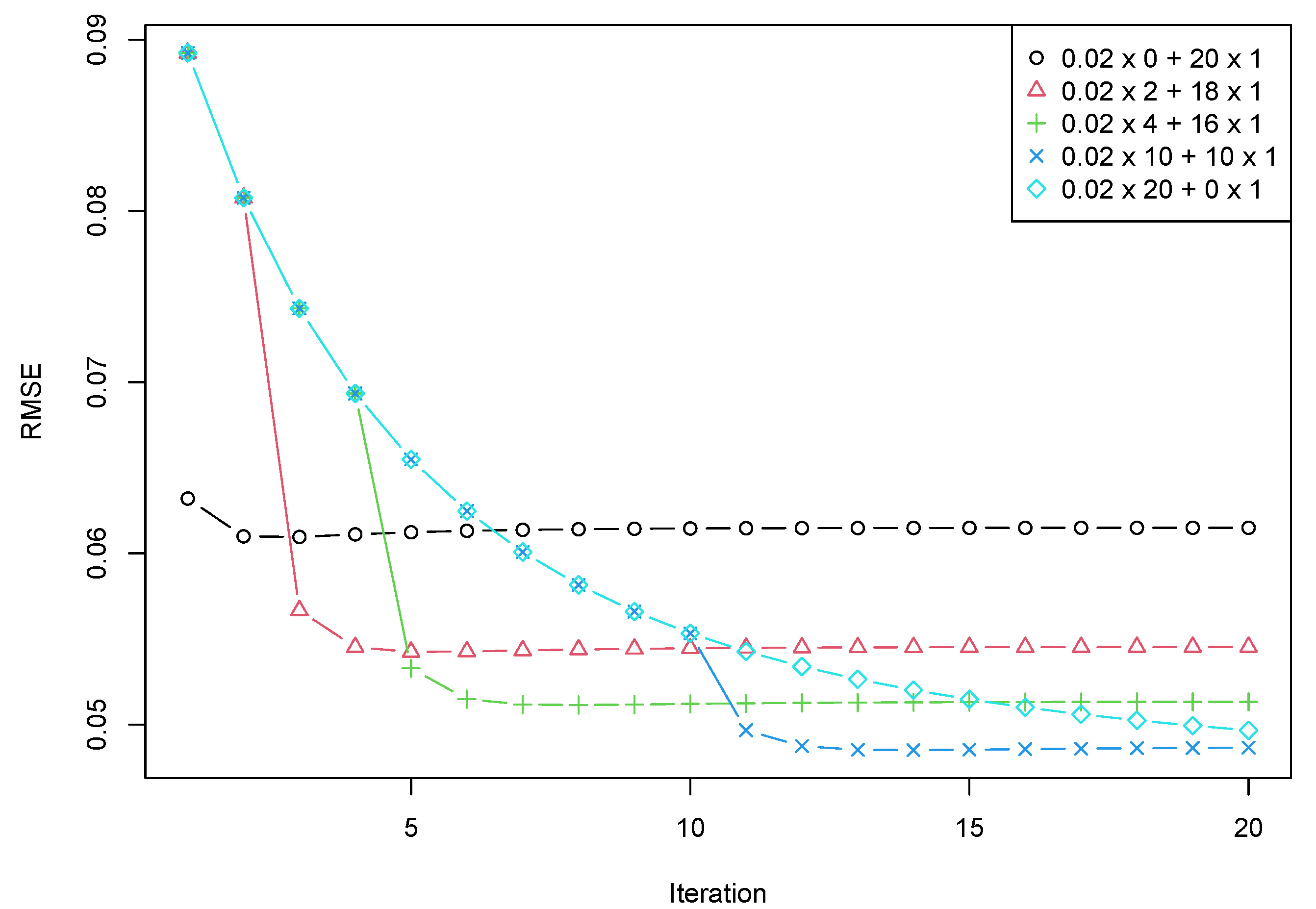
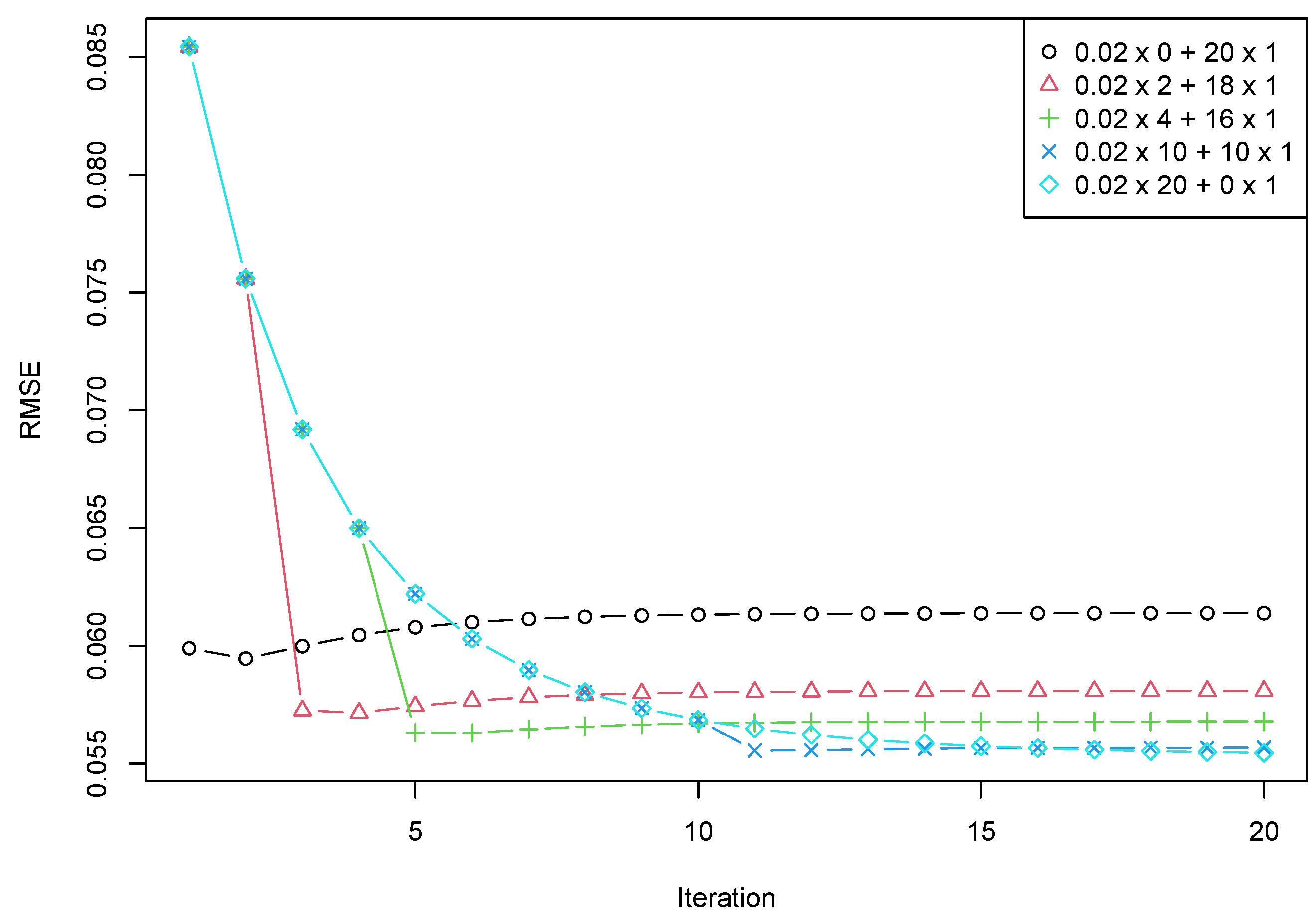
Section 5.2 demonstrates the capabilities of the proposed algorithm.
Paper’s structure. In this paper, we study general properties of alternating projections (
Section 2) and mixed alternating projections (
Section 3) and then apply them to Cadzow iterations with a justification of the choice of weights for the projectors participating in the mixed iterations. To do this, we consider a linearized version of the algorithm, where the projection on the set of rank-deficient matrices is replaced by the projection on the tangent subspace to the set of such matrices (
Section 4). This allows us to apply the linear operator theory to the mixed iterations (
Section 5).
Section 5.1 discusses how the algorithm’s parameters affect the accuracy and rate of convergence. In
Section 5.2, the obtained results are confirmed by a numerical experiment.
Section 6 and
Section 7 conclude the paper.
2. Alternating Projections
Consider the linear case where we are looking for a solution to an optimization problem
where
and
are linear subspaces of
with a nonempty intersection of dimension
.
The solution to the problem can be found using the method of alternating projections with an initial value of
and the iteration step
The following statement is known.
Theorem 1 ([
15], Theorem 13.7).
that is, the limit of the iterations is equal to the projection on the intersection of the subspaces and . This allows us to prove the following property. Denote .
Corollary 1. All the eigenvalues of the matrix lie within the unit circle; the eigenvalue , which only has modulus 1, is semi-simple and has multiplicity equal to ; the corresponding eigenvectors form the basis of .
Proof. The statement of the corollary is obviously true in the case of diagonalizable matrix
, since by Theorem 1,
tends to a projection matrix of rank
m whose eigenvalues (1 of multiplicity
m and 0 of multiplicity
) are the limits of the powers of the eigenvalues of
. In the general case, the result is based on the statement “Limits of Powers” in ([
16], page 630), which, among other things, states that the eigenvalue 1 is semi-simple—i.e., its algebraic and geometric multiplicities coincide. The geometric multiplicity
m of the unit root follows from the fact that the vectors from
(and only they) correspond to the eigenvalue 1 of the matrix
. □
The following proposition establishes the convergence rate of alternating projections.
Proposition 1. The following inequality holds:where is some positive constant, is an arbitrarily small real number and is the largest non-unit (that is, -th) eigenvalue of the matrix . Proof. The theorem ([
17], Theorem 2.12) implies that for a matrix
, the convergence rate of
to the limit matrix
is determined by the spectral radius
of the difference matrix. Namely, for any
, there exists a constant
C such that
, where
is the induced norm. By Corollary 1, both matrices
and
have eigenvalue one corresponding to the same eigenspace. Since the other eigenvalues of
are zero, the spectral radius of the difference matrix is
, which proves the statement. □
Thus, the convergence rate of the algorithm with iterations given by (
8) is determined by the modulus of the eigenvalue
: the closer it is to one, the slower the algorithm converges.
Remark 1. Using the commutativity property and , the expression on the left side of the inequality (
9)
can be rewritten as where , , , and are orthogonal complements of the in the subspaces and , respectively. Then is the largest absolute eigenvalue of the matrix . Let us show the relation of to canonical correlations and principal angles between subspaces.
Proposition 2. Let be the matrix consisting of a basis of the subspace as its columns and be the matrix consisting of a basis of the subspace as its columns. Then, the following is true: Proof. The formula (
10) is obtained by multiplying the solutions of two least-squares approximation problems related to the subspaces
and
. □
Remark 2. The matrix on the right side of the equality (
10)
arises in the problem of computing canonical correlations. The squares of canonical correlations are equal to the squares of cosines of the so-called principal angles between subspaces and , spanned by the columns of the matrices, and are calculated using the eigenvalues of this matrix. Since we need only the leading principal angle, which is the angle between subspaces, we will use the simpler definition of the cosine of the angle between subspaces through the inner product.
Definition 1 ([
18]).
Let and be two linear subspaces of a Hilbert space with inner product and the corresponding (semi-)norm . Then, the cosine of the angle between and is defined as 3. Mixed Alternating Projections
Suppose that different norms may be considered in the problem (
7). For example, such a case arises if a weighted least-squares (WLS) problem is solved. Such a problem can be solved both with an optimal weight matrix in terms of the minimum error of WLS estimates and with some suboptimal ones.
Thus, consider two equivalent norms and assume that the application of the method of alternating projections in the first norm leads to a more accurate estimation of the solution, but the algorithm converges slowly, and alternating projections in the second norm, on the contrary, converge faster, but the accuracy of the solution is worse.
We propose a way to speed up the convergence of the algorithm using the first norm, almost without worsening the accuracy of the solution. Let us consider the projectors by two equivalent norms and denote the corresponding matrices and . This notation is introduced and implies both projections in one of the 1st or 2nd norms in the definition , .
The mixed alternating projections are defined as:
where
. Since this formula uses only linear operators, we can prove the main theorem of this paper.
Theorem 2. For the algorithm given by (
11),
the following relations are true, where convergence is in the operator norm: - 1.
if is fixed and .
- 2.
There exists an equivalent third norm such that if is fixed and .
Proof. The proof of the first statement follows from Theorem 1: as and also for any .
To prove the second statement, we first apply Theorem 1 to the matrix
as
, and then consider the matrix
. It is sufficient to show that the matrix
defines a projection—i.e.,
; then, the required projection is
in a third norm. By using direct substitution, we obtain:
Since
for any
, the second statement is proved. □
Theorem 2 has the following interpretation: if one first makes
steps with projections in the first norm in the iteration (
11), and then iterates with projections in the second norm, then the obtained result will still be a projection on the desired subspace (item 2), and the larger
is, the closer this projection will be to the projection in the first norm (item 1). This implies that to achieve fast and accurate estimation, the first norm should correspond to a more accurate solution of the problem and possibly slower convergence of the alternating projections, and the second norm can correspond to a less accurate solution but faster iterations. The rate of convergence of the corresponding operators is explained by Proposition 1.
A general rule in optimization is that the accuracy of two successive optimization methods is inherited from the second method, so the first method is chosen to be fast and possibly inaccurate, and the second method to be more accurate. Theorem 2 shows that in alternating projections, the situation is in some sense the opposite. This can be explained as follows. Optimization methods use the target function at each step, and can therefore adjust the steps. In the case of alternating projections, initial data are used only to compute the first iteration. Therefore, it is important to perform the first iterations in the proper direction.
4. Linearized Cadzow Iterations in the Signal-Estimation Problem
In the next
Section 5, we apply the approach proposed in
Section 3 to solving the SLRA problem (
3) to estimate signals in time series. Since this approach considers alternating projections to linear subspaces, we start with linearization of the Cadzow iteration (
5). The Cadzow iteration is not linear because it uses the projection onto the nonconvex set
of matrices of rank not larger than
r, which is not a closed subspace but is a smooth manifold [
19].
Let us sketch the way of linearization in the neighborhood of a time series
of rank
r. First, we consider the set
in the neighborhood of the point
. The projection in the neighborhood of this point is correctly defined if we solve the signal-estimation problem for a noisy time series of the form
, where
is a random vector with a zero mean and an autocovariance matrix proportional to
, where the variances are small enough and
is a given weight matrix. After that, we construct a linearized iteration by replacing the set
with a tangent subspace at
. Then, we can reduce the linearized iteration to a multiplication by a real matrix and find its properties. As a result, we obtain asymptotic relations for the linearization which explains the yield of the full Cadzow iteration (
5).
4.1. Linearization of the Operator
Consider the matrix
,
and
, where
and
is a series of rank
r; hence, the matrix
has rank
r. In the neighborhood of the point
, the set
is a smooth manifold of dimension
, and the tangent subspace
at
is expressed as follows [
19]:
where
and
are arbitrary full-rank matrices such that
and
. Note that the definition is correct because
depends only on
and
.
Let us denote by
the projection on
in the norm generated by (
4). Then, the linearized Cadzow iteration in the neighborhood of the point
has the following form:
Set
,
,
. Then, we can rewrite (
13) as
Note that each of the operators inside the brackets is linear. Hence, their composition is a linear operator and therefore can be written as a matrix, which we denote
:
Formally, we can calculate the elements of the matrix
by successive substituting
N standard unit vectors into the composition of operators.
4.2. Intersection of Subspaces
For a compact representation of the further results, let us describe the intersection of the tangent subspace to the set of matrices of finite rank and the space of Hankel matrices .
Let us gather necessary definitions from [
12].
Definition 2. We say that a series is governed by a generalized linear recurrence relation (GLRR) with coefficients , where and , if . We denote by the subspace of time series governed by the GLRR().
Consider an equivalent form of
. Denote by
the operator
defined as follows:
where
. Then,
can be represented in another form as
where
[
20].
Remark 3. Since the columns and rows of the trajectory matrix of a time series in satisfy the same GLRR() as the original series does, we can take and as and in (
12),
respectively. Definition 3. Let . Denote by the acyclic convolution of the vector with itself: As shown in [
12], the tangent subspace to
at
coincides with
,
. The following theorem establishes the relation between the tangent subspaces to the manifold of time series governed by GLRRs and the manifold of their trajectory matrices.
Theorem 3. Let ; i.e., let be a series of rank r, , and —i.e., let be governed by the GLRR() for a vector . Then, , where .
Proof. Consider a matrix
in the intersection of
and
. In particular, there exists
:
. Let us calculate the
-th element of the matrix
from (
12) following Remark 3:
where
are coefficients of the vector
; see definition (
17). The values of
, where
i runs from 1 to
and
j runs from 1 to
, cover the entire interval from 1 to
, and therefore, (
18) is equivalent to
. Thus, according to (
16), all such
constitute
. □
4.3. Limit Property of the Composition of Projections
First, consider the relation connecting the (semi-)norm
generated by the inner product (
2) and the (semi-)norm
, which is generated by the inner product (
4) (semi-norms arise if not to require nondegeneracy of the matrices
,
and
). The mapping
preserves the norm if
for any
, where
,
and
are matrix weights and
is a weight matrix.
Define the convolution of the two matrices
for
,
and
as
where
,
and
.
There is a known relation linking the weight matrix to the matrix weights.
Theorem 4 ([
8]).
for any series if and only if . All statements of the following theorem are a direct application of Theorem 1 and Proposition 1 with consideration to
and
.
Theorem 5. Let be a time series governed by a GLRR(), . Then
- 1.
The following operator convergence takes place:that is, the limit of iterations is equal to the projection on the intersection of the subspaces and . - 2.
The following matrix convergence is valid:where denotes the matrix of projection on the linear subspace in the norm generated by the inner product (
2)
with the weight matrix . - 3.
All the eigenvalues of the matrix lie within the unit circle; the eigenvalue , which only has modulus 1, is semi-simple and has multiplicity equal to ; the corresponding eigenvectors form the basis of . If the weight matrix is nondegenerate,where C is some positive constant, is any small real number, is the largest non-unitary (that is, -th) eigenvalue of the matrix .
4.4. Influences of the Matrices and on the First Principal Angle and Convergence Rate of the Cadzow Method
Recall that if one wants to solve the problem (
1) for a given weight matrix
using the Cadzow method, one must require
. To obtain the maximum likelihood estimate, the matrix
is chosen as the inverse of the noise autocovariance matrix. However, for such weight matrices
in the case of white or autoregressive noise, there are no nondegenerate matrix weights
and
. Therefore, the matrix weights
and
are sought numerically under the upper bound
of the condition number of
for a given
.
The works [
13,
14] are devoted to the search for appropriate matrix weights. To find these weights, the matrix
was fixed in some specific way, and the diagonal matrix
was numerically found such that the measure of discrepancy considered in these papers was minimal:
provided
, where
. Simulations have shown that the control of matrix conditionality by the parameter
affects the convergence rate of the Cadzow method and the estimation accuracy. Decreasing
increases the set on which the matrix
is matched; this allows us to obtain a weight matrix with smaller values of
and leads to improved accuracy of the signal estimate. However, decreasing
also results in slower convergence of the iterations, which requires a theoretical explanation. A general theoretical dependence on
could not be obtained, so we demonstrate the convergence rate when
tends to zero.
We know from Theorem 5 that the convergence rate of the methods is affected by the -th eigenvalues of the matrix . From Remark 2, we know that this eigenvalue is equal to the squared cosine of the -th angle between the corresponding subspaces.
The calculation of the cosine of the
-th principal angle between
and
can be reduced to finding the cosine between the orthogonal (in the inner product
, given in (
4)) complements to
in
and
, respectively. Let us denote these complements
and
. Note that by Theorem 3,
, and its rank equals
. For brevity, we will omit
in
and
.
The properties of the principal angles concerning Remark 1 lead directly to the following statement.
Proposition 3. The cosine of the -th principal angle between the subspaces and is equal to .
4.4.1. Example of Bad Convergence as Tends to Zero
Using Proposition 3 and the fact that the cosine of the -th principal angle determines the convergence rate (Proposition 1), we show by a specific example that this cosine tends to one as tends to zero; this makes the convergence of the linearized Cadzow algorithm as slow as possible.
Let
and
. Let the matrix weights
be the identity matrix, which corresponds to the case of white noise. For simplicity, we make the matrix
equal to
according to [
13]. Numerical experiments show that similar matrix weights (up to multiplying a constant) are obtained when applying the method from [
12] of finding weights for small
. Consider the degenerate case
studied in [
13].
Proposition 4. For any matrix , we can find a matrix such that .
Proof. The inner product (
4) of matrices
and
with the matrix weights
and
depends only on the first and last columns of these matrices due to the form of
. Therefore, the required matrix
can be written in the form
, where the projection is calculated uniquely using the values from the first and last columns of the matrix
. □
Corollary 2. Let be an arbitrary matrix, , . Then, .
Proof. The corollary is proved by the following substitution:
. □
Corollary 3. Let . Denote and . Then, the following is fulfilled: Proof. Since , this expression is smooth in and uniquely defined when . The projection is also smooth in and uniquely defined at . Applying Corollary 2 for and , we obtain that ; this yields the statements of the corollary due to the smoothness of the left-side and right-side expressions. □
The declared result is described in the following proposition.
Proposition 5. Let and . Then, Proof. Note that the cosine of the angle between a vector and a subspace (see Definition 1) is equal to the cosine between this vector and its projection to the subspace. Thus, we can use Corollary 3. It follows from Corollary 3 that the numerator and denominator in the definition of cosine are equal, and therefore, it is sufficient to prove that . The latter can be shown by constructing such a matrix from the trajectory matrix .
Let be a row of the matrix with a non-zero element at the first or last position (such a row always exists since ). Without loss of generality, we suppose that the first element of is not zero. Denote the mapping that truncates the vector to the first L coordinates. Then, let be a nonzero vector, which does not lie in , and . By construction, and have a nonzero first column, and therefore, . □
Thus, for a popular case , we have shown that the cosine of the -th principal angle can be as close to 1 as one wishes; hence, the convergence of the Cadzow method becomes as slow as one chooses with a small . Recall that the sense of choosing a small is to increase the estimation accuracy.
4.4.2. Numerical Example for the Dependence of Convergence on
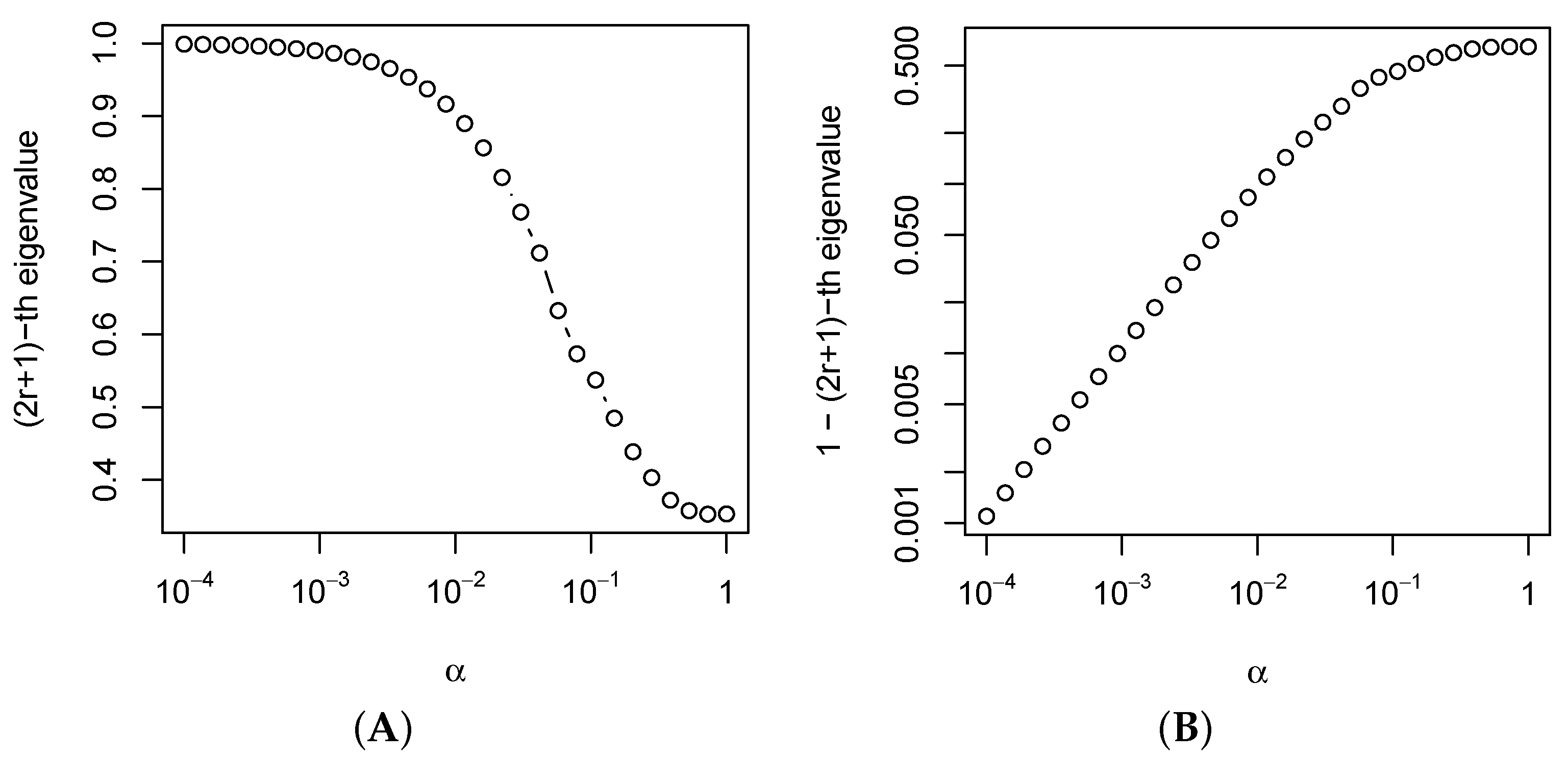
Figure 1 shows the
-th eigenvalue of the
(the squared cosine of the
-th principal angle between the corresponding subspaces) for the series
with the common term
and
; the window length is
and the signal rank is
. The values
are taken from
on the logarithmic scale, and the matrix
is calculated using the weight search method from [
14].
Figure 1 demonstrates that the eigenvalues are close to 1 for small
; however, they do not equal one; that is, the Cadzow iterations converge. This result explains the decrease in the convergence rate of the Cadzow method with decreasing values of the parameter
, which was numerically demonstrated in [
13,
14].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




