
Solar Photovoltaic Integration in Monopolar DC Networks via the GNDO Algorithm




Abstract
:1. Introduction
1.1. General Context
1.2. Motivation
1.3. State-of-the-Art Review
1.4. Contribution and Scope
- i.
- The application of the GNDO approach to the problem regarding the optimal placement and sizing of PV sources in monopolar DC distribution networks by improving the existing literature results reported in [22] via the application of the discrete-continuous VSA.
- ii.
- The combination of the GNDO approach with the efficient successive approximation power flow method using a master–slave optimization strategy. The main advantage of this combination lies in its reduced processing times (less than 10 min) to solve the studied problem in the DC versions of the IEEE 33- and IEEE 69-bus grids, with excellent numerical results.
1.5. Document Structure
2. Mathematical Formulation
3. Solution Methodology
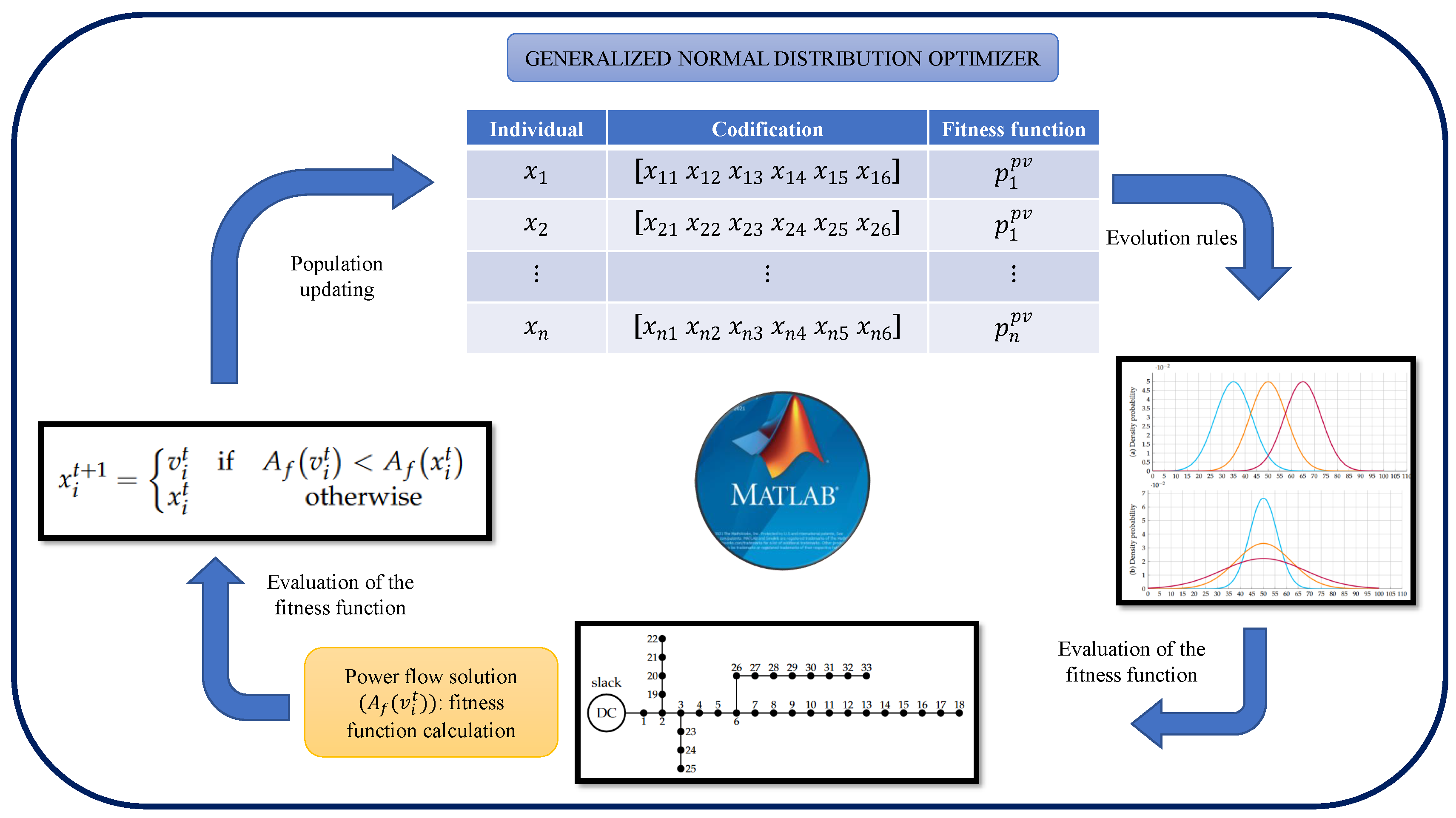
3.1. Generalized Normal Distribution Optimization Algorithm
- ✔
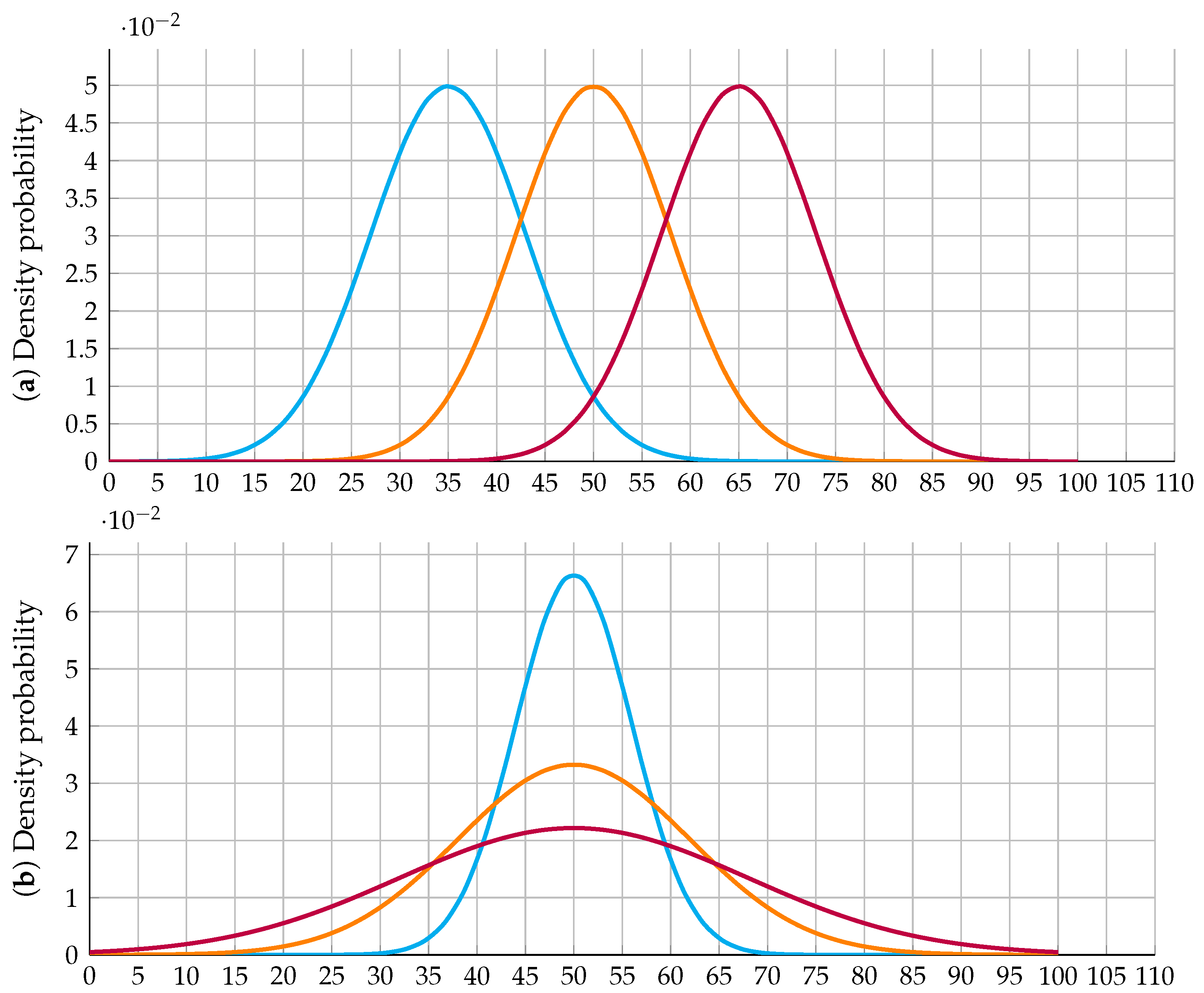
- An initial population is generated with a normal distribution throughout the solution space. This initial population evolves through the solution space to explore and exploit its promissory sub-regions. During the first stages of the optimization process, the variances regarding the positions of the solution individuals show minimal variations, and the location of the decision variables concerning the global optimal solution can be considered to be randomly distributed with a normal structure.
- ✔
- As the evolution process through the solution space advances, the main position and the standard deviation are continuously decreased. This is done in order to pass from the exploration phase to the exploration of the solution space, i.e., refining the solution around the best solution reached.
- ✔
- At the end of the optimization process, the variance of the positions between all the solution individuals and the distance between the mean position and the optimal solution reach minimum values.
3.1.1. Local Exploration
3.1.2. Global Exploration
3.2. Power Flow Solution
3.3. Summary of the Optimization Methodology
| Algorithm 1: Application of the GNDO method to locate and size PV sources in monopolar DC networks. |
 |
4. Test Feeder Characteristics and Problem Parametrization
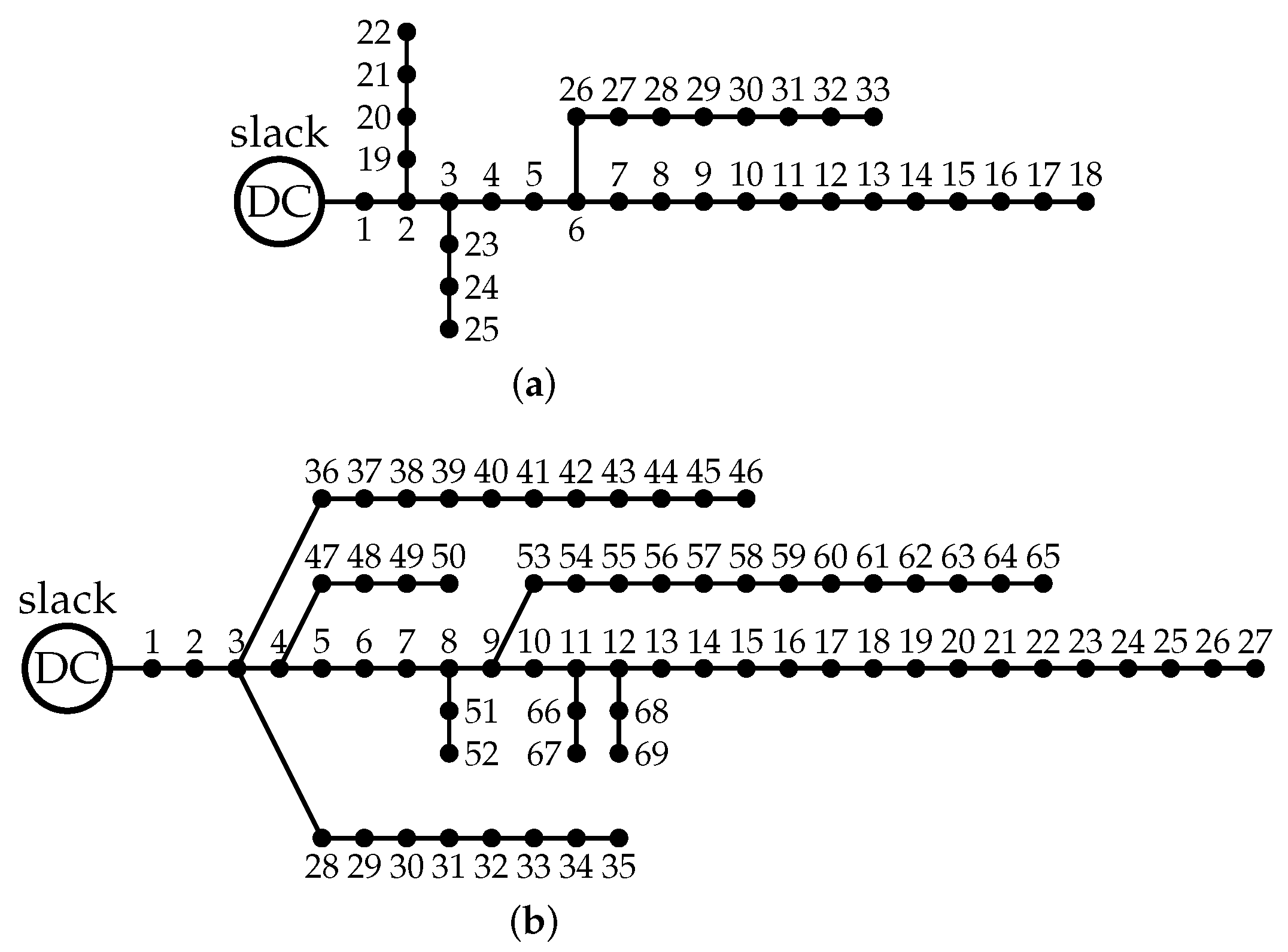
4.1. First Test Feeder
4.2. Second Test Feeder
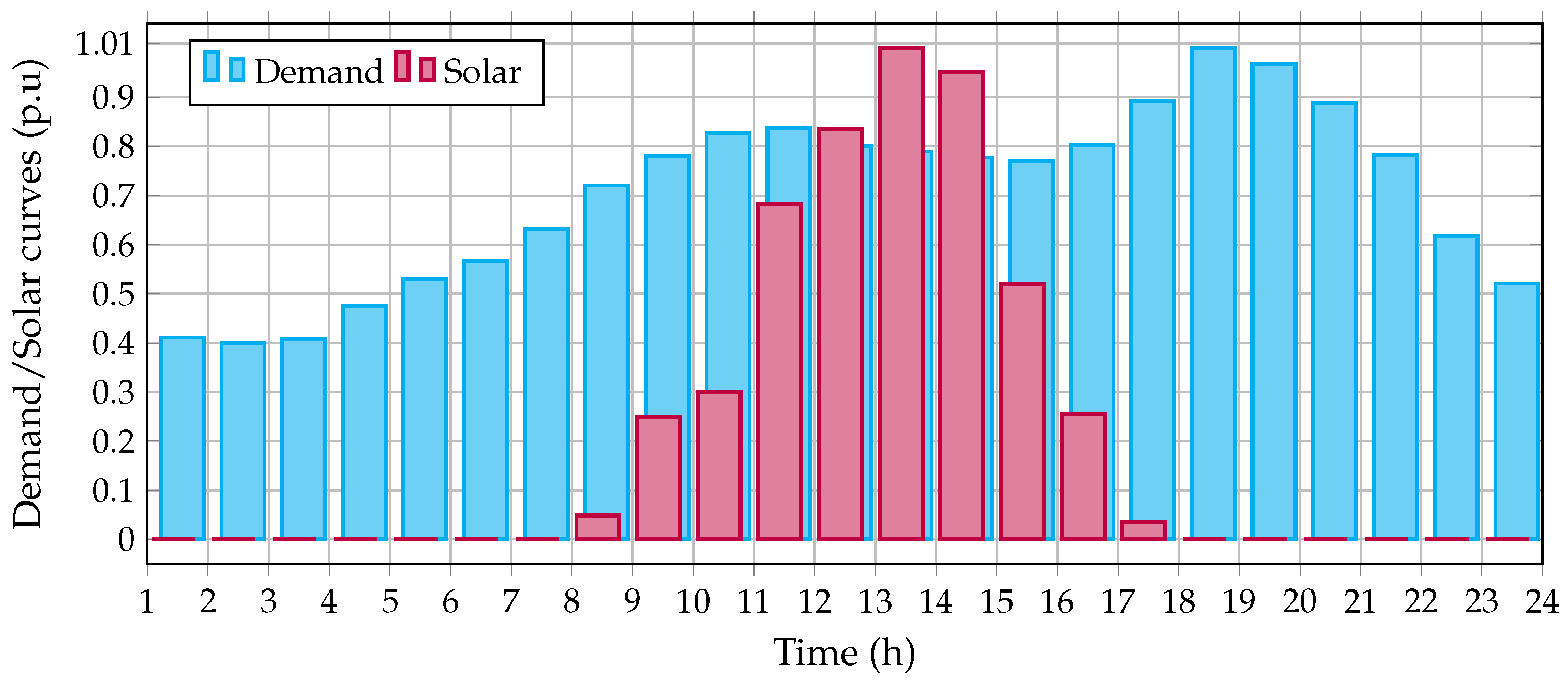
4.3. Parametrization of the Studied Problem
5. Computational Validation
5.1. Results for the First Test Feeder
- ✔
- The reduction concerning the benchmark case with the CBGA was about USD/year 981,318.19, which corresponds to . The reduction reached with the DCVSA was about USD/year 981,617.69, (), and the best solution for the benchmark case was reached with the proposed GNDO approach, with USD/year 981,671.42, i.e., a reduction of . These results show that all the optimizers yield an annual expected reduction of USD 981,300.00 per year of operation. Furthermore, comparing the best literature report (solution with the DCVSA in [22] with the proposed GNDO approach, an improvement of about USD/year 53.73 is achieved, which makes it the best result reported in the current literature for the 33-bus grid with a DC monopolar configuration.
- ✔
- The three algorithms detected that one of the best sites to locate a PV source is node 31, where injections of power higher than 1540 kW are listed. This location demonstrates that the 33-bus grid is one of the most sensitive nodes to install PV sources concerning the expected improvement of the objective function. In addition, the total PV capacity installed with the CBGA is kW, kW with the DCVSA, and kW with the proposed GNDO. These values show that, for the 33-bus grid, the proposed GNDO installed less power with better objective function values, which a better nodal selection can explain in comparison with the CBGA and the DCVSA.
5.2. Results for the Second Test Feeder
- ✔
- The proposed GNDO approach achieves the best reduction with respect to the benchmark case, with a value of USD/year 1,032,408.85, i.e., . The DCVSA reached an annual reduction of USD/year 1,031,881.8, corresponding to an improvement of , and the CBGA reduced the expected annual operating costs by about USD/year 1,031,821.52, i.e., with respect of the benchmark case.
- ✔
- The nodes to locate PV generators for the proposed GNDO and the CBGA are the same, i.e., nodes 19, 61, and 64. However, the sizes assigned to the PV sources in these nodes differ between them. This behavior is explained by using the Gaussian distribution functions and decreasing the radius in the GNDO approach, which allows shifting from exploring the solution space to exploiting it.
- ✔
- The improvement obtained with the GNDO with respect to the CBGA was USD 587.33 per year of operation, whereas, for the DCVSA, this improvement was about USD/year . These results demonstrate that the proposed master–slave optimizer is the best current solution reported for the 69-bus DC network with a monopolar configuration, i.e., the GNDO represents the reference point for future research in this area.
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Liu, F.; Wang, Z.; Low, S.H.; Mei, S. Optimal Power Flow in Stand-Alone DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5496–5506. [Google Scholar] [CrossRef] [Green Version]
- Garces, A. On the Convergence of Newton’s Method in Power Flow Studies for DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5770–5777. [Google Scholar] [CrossRef] [Green Version]
- Strzelecki, R.M.; Benysek, G. (Eds.) Power Electronics in Smart Electrical Energy Networks; Springer: London, UK, 2008. [Google Scholar] [CrossRef]
- Junior, M.E.T.S.; Freitas, L.C.G. Power Electronics for Modern Sustainable Power Systems: Distributed Generation, Microgrids and Smart Grids—A Review. Sustainability 2022, 14, 3597. [Google Scholar] [CrossRef]
- Lee, J.O.; Kim, Y.S.; Jeon, J.H. Generic power flow algorithm for bipolar DC microgrids based on Newton–Raphson method. Int. J. Electr. Power Energy Syst. 2022, 142, 108357. [Google Scholar] [CrossRef]
- Lamb, W.F.; Grubb, M.; Diluiso, F.; Minx, J.C. Countries with sustained greenhouse gas emissions reductions: An analysis of trends and progress by sector. Clim. Policy 2021, 22, 1–17. [Google Scholar] [CrossRef]
- Lima, M.; Mendes, L.; Mothé, G.; Linhares, F.; de Castro, M.; da Silva, M.; Sthel, M. Renewable energy in reducing greenhouse gas emissions: Reaching the goals of the Paris agreement in Brazil. Environ. Dev. 2020, 33, 100504. [Google Scholar] [CrossRef]
- López, A.R.; Krumm, A.; Schattenhofer, L.; Burandt, T.; Montoya, F.C.; Oberländer, N.; Oei, P.Y. Solar PV generation in Colombia—A qualitative and quantitative approach to analyze the potential of solar energy market. Renew. Energy 2020, 148, 1266–1279. [Google Scholar] [CrossRef]
- Cuervo, F.I.; Arredondo-Orozco, C.A.; Marenco-Maldonado, G.C. Photovoltaic power purchase agreement valuation under real options approach. Renew. Energy Focus 2021, 36, 96–107. [Google Scholar] [CrossRef]
- Moradi, M.H.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Paz-Rodríguez, A.; Castro-Ordoñez, J.F.; Montoya, O.D.; Giral-Ramírez, D.A. Optimal integration of photovoltaic sources in distribution networks for daily energy losses minimization using the vortex search algorithm. Appl. Sci. 2021, 11, 4418. [Google Scholar] [CrossRef]
- Selim, A.; Kamel, S.; Alghamdi, A.S.; Jurado, F. Optimal placement of DGs in distribution system using an improved harris hawks optimizer based on single-and multi-objective approaches. IEEE Access 2020, 8, 52815–52829. [Google Scholar] [CrossRef]
- Mohanty, B.; Tripathy, S. A teaching learning based optimization technique for optimal location and size of DG in distribution network. J. Electr. Syst. Inf. Technol. 2016, 3, 33–44. [Google Scholar] [CrossRef] [Green Version]
- Ayodele, T.; Ogunjuyigbe, A.; Akinola, O. Optimal location, sizing, and appropriate technology selection of distributed generators for minimizing power loss using genetic algorithm. J. Renew. Energy 2015, 2015, 832917. [Google Scholar] [CrossRef] [Green Version]
- Raharjo, J.; Adam, K.B.; Priharti, W.; Zein, H.; Hasudungan, J.; Suhartono, E. Optimization of Placement and Sizing on Distributed Generation Using Technique of Smalling Area. In Proceedings of the 2021 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 22–31 October 2021; pp. 475–479. [Google Scholar]
- Grisales-Noreña, L.F.; Gonzalez Montoya, D.; Ramos-Paja, C.A. Optimal sizing and location of distributed generators based on PBIL and PSO techniques. Energies 2018, 11, 1018. [Google Scholar] [CrossRef] [Green Version]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Gil-González, W.; Alcalá, G.; Hernandez-Escobedo, Q. Optimal location and sizing of PV sources in DC networks for minimizing greenhouse emissions in diesel generators. Symmetry 2020, 12, 322. [Google Scholar] [CrossRef] [Green Version]
- Gil-González, W.; Montoya, O.D.; Grisales-Noreña, L.F.; Perea-Moreno, A.J.; Hernandez-Escobedo, Q. Optimal placement and sizing of wind generators in AC grids considering reactive power capability and wind speed curves. Sustainability 2020, 12, 2983. [Google Scholar] [CrossRef] [Green Version]
- Radosavljević, J.; Arsić, N.; Milovanović, M.; Ktena, A. Optimal placement and sizing of renewable distributed generation using hybrid metaheuristic algorithm. J. Mod. Power Syst. Clean Energy 2020, 8, 499–510. [Google Scholar] [CrossRef]
- Gil-González, W.; Garces, A.; Montoya, O.D.; Hernández, J.C. A mixed-integer convex model for the optimal placement and sizing of distributed generators in power distribution networks. Appl. Sci. 2021, 11, 627. [Google Scholar] [CrossRef]
- Cortés-Caicedo, B.; Molina-Martin, F.; Grisales-Noreña, L.F.; Montoya, O.D.; Hernández, J.C. Optimal Design of PV Systems in Electrical Distribution Networks by Minimizing the Annual Equivalent Operative Costs through the Discrete-Continuous Vortex Search Algorithm. Sensors 2022, 22, 851. [Google Scholar] [CrossRef]
- Hlaili, M.; Mechergui, H. Comparison of Different MPPT Algorithms with a Proposed One Using a Power Estimator for Grid Connected PV Systems. Int. J. Photoenergy 2016, 2016, 1728398. [Google Scholar] [CrossRef] [Green Version]
- Montoya, O.D.; Grisales-Noreña, L.F.; Ramos-Paja, C.A. Optimal Allocation and Sizing of PV Generation Units in Distribution Networks via the Generalized Normal Distribution Optimization Approach. Computers 2022, 11, 53. [Google Scholar] [CrossRef]
- Farivar, M.; Low, S.H. Branch Flow Model: Relaxations and Convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar] [CrossRef]
- Crainic, T.G.; Toulouse, M. Parallel Meta-heuristics. In International Series in Operations Research & Management Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 497–541. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, Z.; Mirjalili, S. Generalized normal distribution optimization and its applications in parameter extraction of photovoltaic models. Energy Convers. Manag. 2020, 224, 113301. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Abouhawwash, M.; Chang, V.; Askar, S. A Local Search-Based Generalized Normal Distribution Algorithm for Permutation Flow Shop Scheduling. Appl. Sci. 2021, 11, 4837. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, J. Exploration-exploitation tradeoffs in metaheuristics: Survey and analysis. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014. [Google Scholar] [CrossRef]
- Garces, A. Uniqueness of the power flow solutions in low voltage direct current grids. Electr. Power Syst. Res. 2017, 151, 149–153. [Google Scholar] [CrossRef]
- Sahin, O.; Akay, B. Comparisons of metaheuristic algorithms and fitness functions on software test data generation. Appl. Soft Comput. 2016, 49, 1202–1214. [Google Scholar] [CrossRef]
- Hanh, L.T.M.; Binh, N.T.; Tung, K.T. A Novel Fitness function of metaheuristic algorithms for test data generation for simulink models based on mutation analysis. J. Syst. Softw. 2016, 120, 17–30. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node i | Node j | () | (kW) | Node i | Node j | () | (kW) |
|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.0922 | 100 | 17 | 18 | 0.7320 | 90 |
| 2 | 3 | 0.4930 | 90 | 2 | 19 | 0.1640 | 90 |
| 3 | 4 | 0.3660 | 120 | 19 | 20 | 1.5042 | 90 |
| 4 | 5 | 0.3811 | 60 | 20 | 21 | 0.4095 | 90 |
| 5 | 6 | 0.8190 | 60 | 21 | 22 | 0.7089 | 90 |
| 6 | 7 | 0.1872 | 200 | 3 | 23 | 0.4512 | 90 |
| 7 | 8 | 1.7114 | 200 | 23 | 24 | 0.8980 | 420 |
| 8 | 9 | 1.0300 | 60 | 24 | 25 | 0.8960 | 420 |
| 9 | 10 | 1.0400 | 60 | 6 | 26 | 0.2030 | 60 |
| 10 | 11 | 0.1966 | 45 | 26 | 27 | 0.2842 | 60 |
| 11 | 12 | 0.3744 | 60 | 27 | 28 | 1.0590 | 60 |
| 12 | 13 | 1.4680 | 60 | 28 | 29 | 0.8042 | 120 |
| 13 | 14 | 0.5416 | 120 | 29 | 30 | 0.5075 | 200 |
| 14 | 15 | 0.5910 | 60 | 30 | 31 | 0.9744 | 150 |
| 15 | 16 | 0.7463 | 60 | 31 | 32 | 0.3105 | 210 |
| 16 | 17 | 1.2860 | 60 | 32 | 33 | 0.3410 | 60 |
| Node i | Node j | () | (kW) | Node i | Node j | () | (kW) |
|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.0005 | 0 | 3 | 36 | 0.0044 | 26 |
| 2 | 3 | 0.0005 | 0 | 36 | 37 | 0.0640 | 26 |
| 3 | 4 | 0.0015 | 0 | 37 | 38 | 0.1053 | 0 |
| 4 | 5 | 0.0251 | 0 | 38 | 39 | 0.0304 | 24 |
| 5 | 6 | 0.3660 | 2.6 | 39 | 40 | 0.0018 | 24 |
| 6 | 7 | 0.3810 | 40.4 | 40 | 41 | 0.7283 | 1.2 |
| 7 | 8 | 0.0922 | 75 | 41 | 42 | 0.3100 | 0 |
| 8 | 9 | 0.0493 | 30 | 42 | 43 | 0.0410 | 6 |
| 9 | 10 | 0.8190 | 28 | 43 | 44 | 0.0092 | 0 |
| 10 | 11 | 0.1872 | 145 | 44 | 45 | 0.1089 | 39.22 |
| 11 | 12 | 0.7114 | 145 | 45 | 46 | 0.0009 | 39.22 |
| 12 | 13 | 1.0300 | 8 | 4 | 47 | 0.0034 | 0 |
| 13 | 14 | 1.0440 | 8 | 47 | 48 | 0.0851 | 79 |
| 14 | 15 | 1.0580 | 0 | 48 | 49 | 0.2898 | 384.7 |
| 15 | 16 | 0.1966 | 45.5 | 49 | 50 | 0.0822 | 384.7 |
| 16 | 17 | 0.3744 | 60 | 8 | 51 | 0.0928 | 40.5 |
| 17 | 18 | 0.0047 | 60 | 51 | 52 | 0.3319 | 3.6 |
| 18 | 19 | 0.3276 | 0 | 9 | 53 | 0.1740 | 4.35 |
| 19 | 20 | 0.2106 | 1 | 53 | 54 | 0.2030 | 26.4 |
| 20 | 21 | 0.3416 | 114 | 54 | 55 | 0.2842 | 24 |
| 21 | 22 | 0.0140 | 5 | 55 | 56 | 0.2813 | 0 |
| 22 | 23 | 0.1591 | 0 | 56 | 57 | 1.5900 | 0 |
| 23 | 24 | 0.3460 | 28 | 57 | 58 | 0.7837 | 0 |
| 24 | 25 | 0.7488 | 0 | 58 | 59 | 0.3042 | 100 |
| 25 | 26 | 0.3089 | 14 | 59 | 60 | 0.3861 | 0 |
| 26 | 27 | 0.1732 | 14 | 60 | 61 | 0.5075 | 1244 |
| 3 | 28 | 0.0044 | 26 | 61 | 62 | 0.0974 | 32 |
| 28 | 29 | 0.0640 | 26 | 62 | 63 | 0.1450 | 0 |
| 29 | 30 | 0.3978 | 0 | 63 | 64 | 0.7105 | 227 |
| 30 | 31 | 0.0702 | 0 | 64 | 65 | 1.0410 | 59 |
| 31 | 32 | 0.3510 | 0 | 11 | 66 | 0.2012 | 18 |
| 32 | 33 | 0.8390 | 14 | 66 | 67 | 0.0047 | 18 |
| 33 | 34 | 1.7080 | 19.5 | 12 | 68 | 0.7394 | 28 |
| 34 | 35 | 1.4740 | 6 | 68 | 69 | 0.0047 | 28 |
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0.1390 | US$/kWh | T | 365 | days | |
| 10 | % | 2 | % | ||
| y | 20 | years | 1 | h | |
| 1036.49 | US$/kWp | 0.0019 | US$/kWh | ||
| 2400 | kW | 0 | kW | ||
| 3 | – | ±10 | % | ||
| US$/V | US$/V | ||||
| US$/W | US$/A |
| Method | Site (Node)/Size (kW) | (US$/Year) |
|---|---|---|
| Bench. case | – | 3,644,043.01 |
| CBGA | 2,662,724.82 | |
| DCVSA | 2,662,425.32 | |
| GNDO | 2,662,371.59 |
| Method | Site (Node)/Size (kW) | (US$/Year) |
|---|---|---|
| Bench. case | – | 3,817,420.38 |
| CBGA | 2,785,598.86 | |
| DCVSA | 2,785,538.58 | |
| GNDO | 2,785,011.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L.F. Solar Photovoltaic Integration in Monopolar DC Networks via the GNDO Algorithm. Algorithms 2022, 15, 277. https://doi.org/10.3390/a15080277
Montoya OD, Gil-González W, Grisales-Noreña LF. Solar Photovoltaic Integration in Monopolar DC Networks via the GNDO Algorithm. Algorithms. 2022; 15(8):277. https://doi.org/10.3390/a15080277
Chicago/Turabian StyleMontoya, Oscar Danilo, Walter Gil-González, and Luis Fernando Grisales-Noreña. 2022. "Solar Photovoltaic Integration in Monopolar DC Networks via the GNDO Algorithm" Algorithms 15, no. 8: 277. https://doi.org/10.3390/a15080277
APA StyleMontoya, O. D., Gil-González, W., & Grisales-Noreña, L. F. (2022). Solar Photovoltaic Integration in Monopolar DC Networks via the GNDO Algorithm. Algorithms, 15(8), 277. https://doi.org/10.3390/a15080277