
Discrete-Time Observations of Brownian Motion on Lie Groups and Homogeneous Spaces: Sampling and Metric Estimation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Contribution and Overview
2. Notation and Background
2.1. Euclidean Diffusion Bridges and Simulation
2.2. Riemannian Manifolds and Lie Groups
2.3. Lie Groups
2.4. Homogeneous Spaces
2.5. Brownian Motion on Riemannian Manifolds
2.6. Brownian Bridges
2.7. One-Point Motions
2.8. Pushforward Measures
3. Simulation of Bridges on Lie Groups
3.1. Radial Process
3.2. Girsanov Change of Measure
3.3. Delyon and Hu in Lie Groups
4. Simulation of Bridges in Homogeneous Spaces
Guiding to the Closest Point
5. Maximum Likelihood Estimation
| Algorithm 1: Parameter estimation: iterative MLE. |
 |
6. Experiments
6.1. Discretization
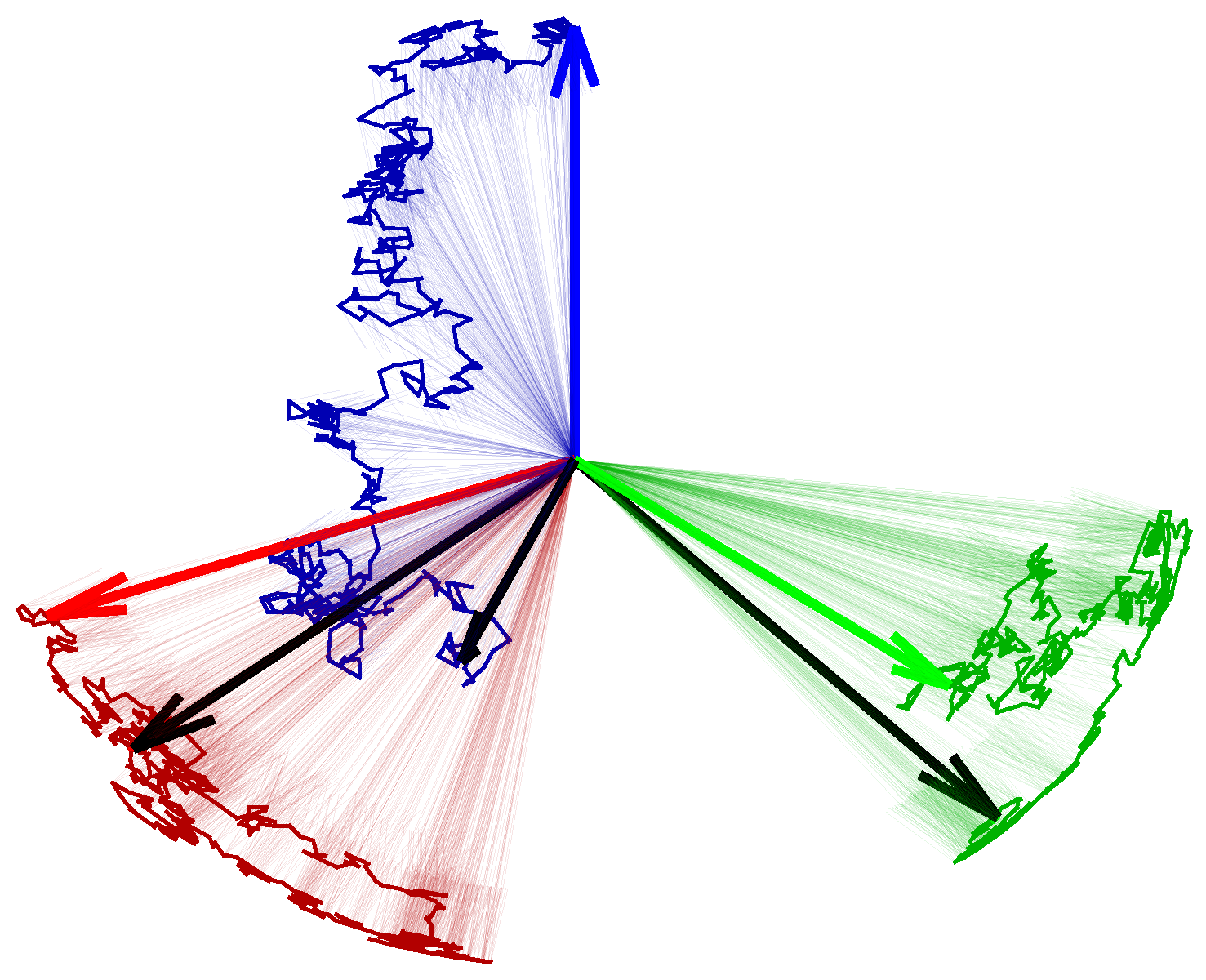
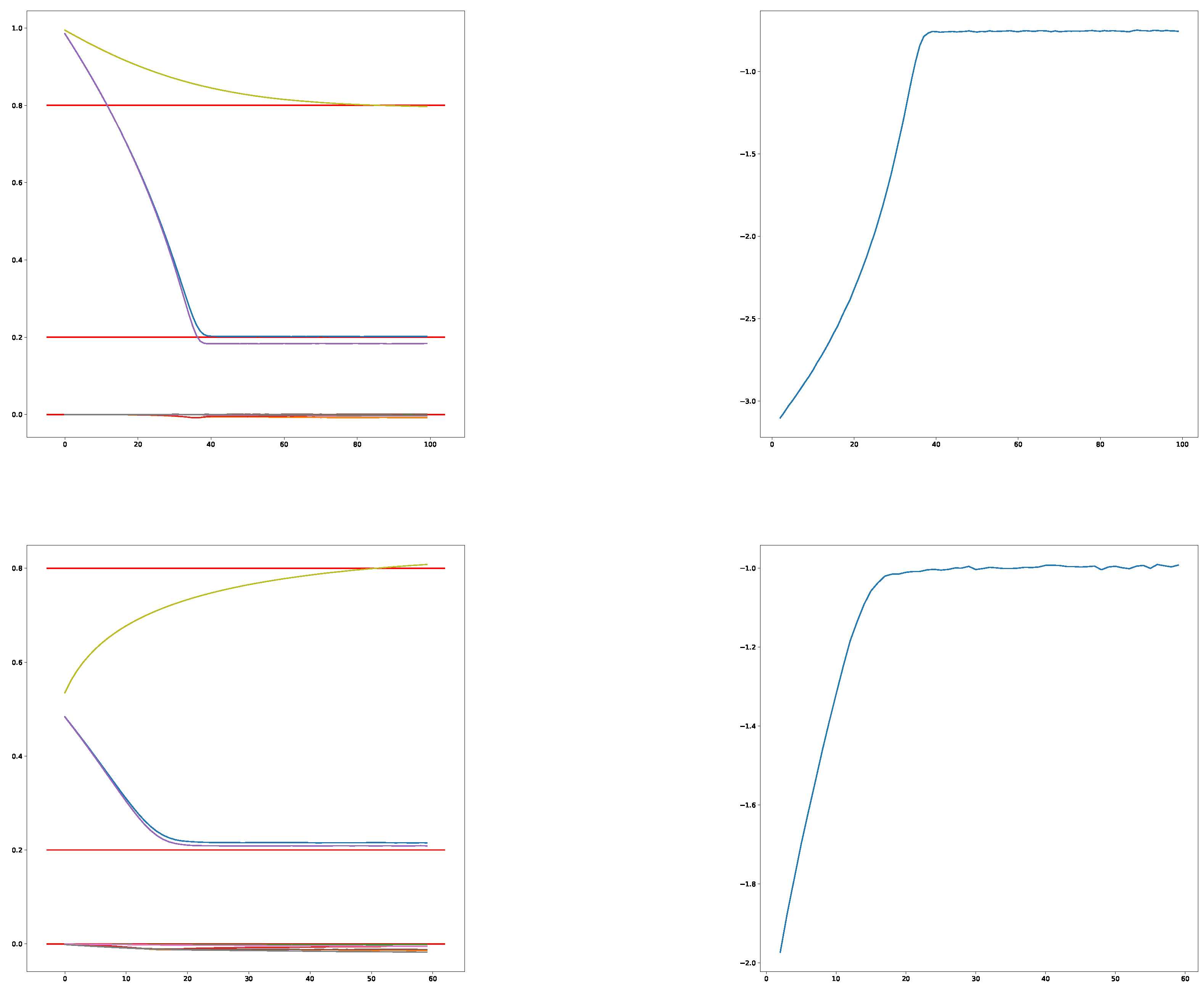
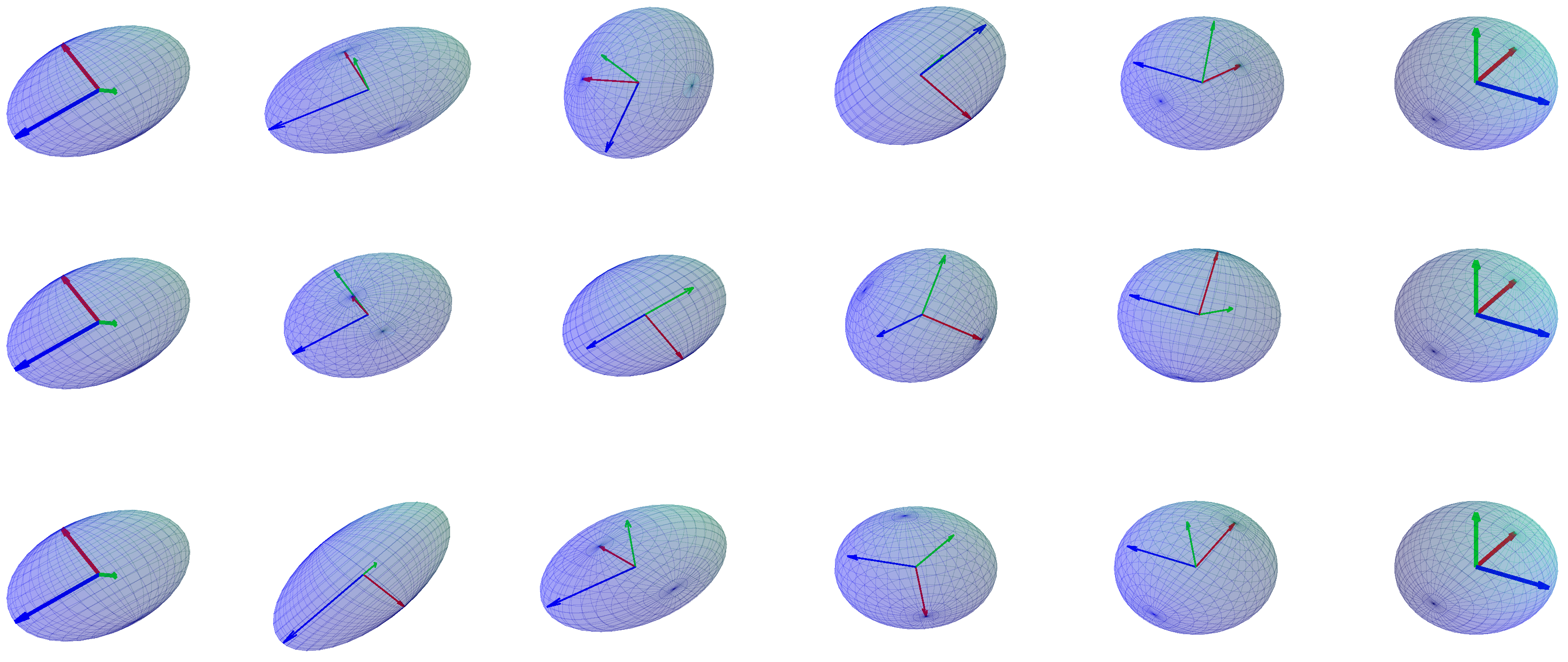
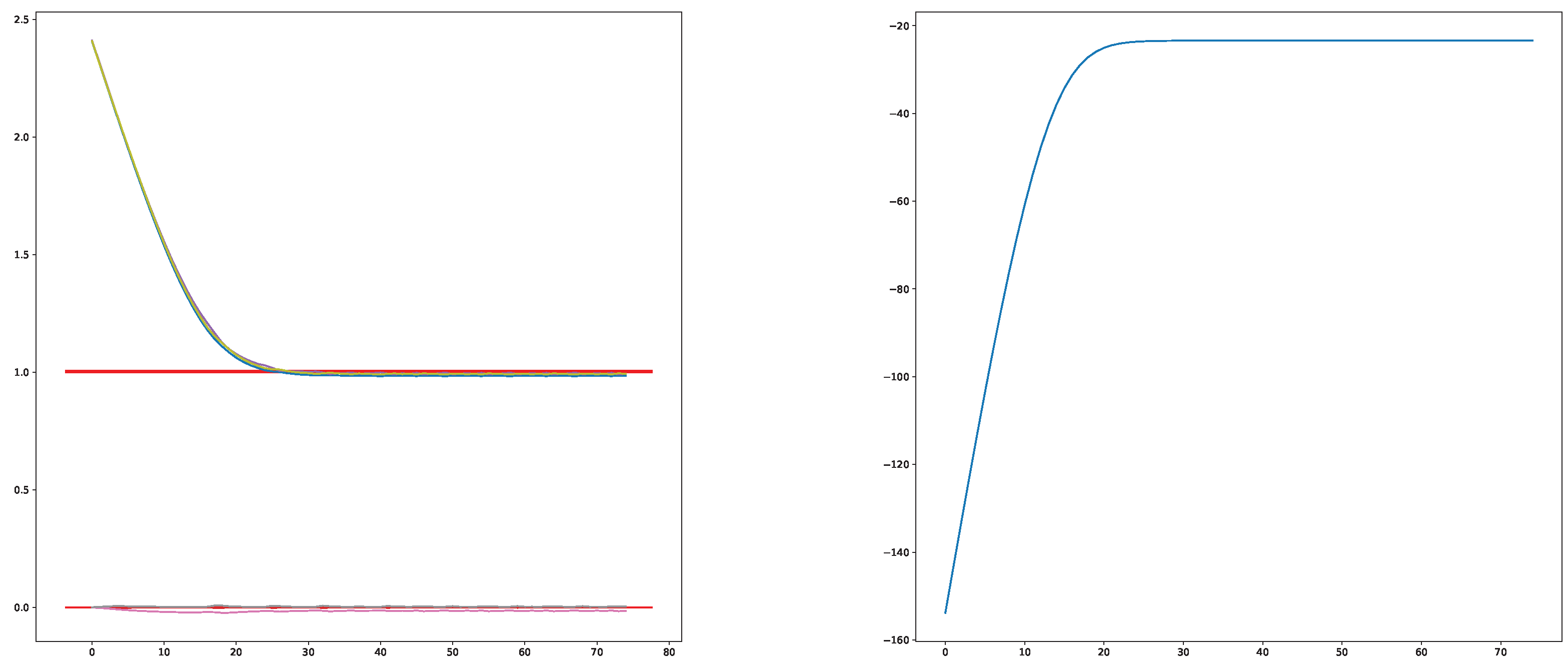
6.2. Importance Sampling and Metric Estimation on SO(3)
6.3. Diffusion Mean Estimation on the Space of Symmetric Positive Definite Matrices
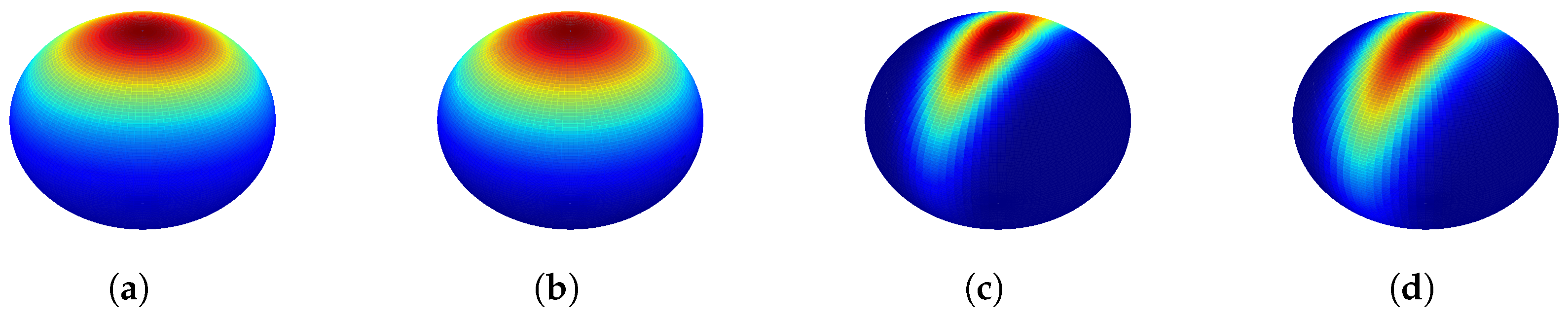
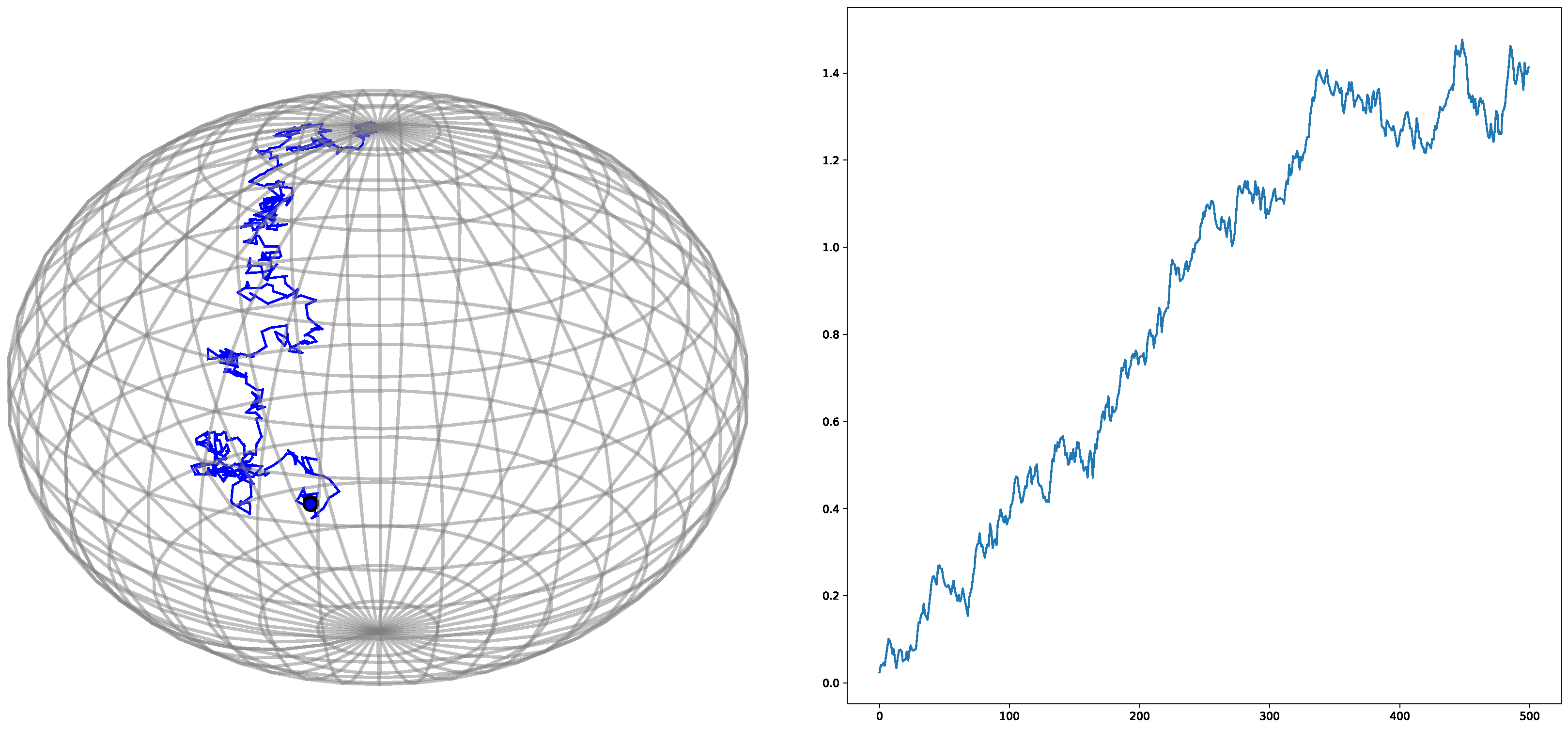
6.4. Density Estimation on the Two-Sphere
7. Conclusions
8. Code
Author Contributions
Funding
Conflicts of Interest
References
- Pedersen, A.R. Consistency and asymptotic normality of an approximate maximum likelihood estimator for discretely observed diffusion processes. Bernoulli 1995, 1, 257–279. [Google Scholar] [CrossRef]
- Bladt, M.; Sørensen, M. Simple simulation of diffusion bridges with application to likelihood inference for diffusions. Bernoulli 2014, 20, 645–675. [Google Scholar] [CrossRef]
- Bladt, M.; Finch, S.; Sørensen, M. Simulation of multivariate diffusion bridges. J. R. Stat. Soc. Ser. B Stat. Methodol. 2016, 78, 343–369. [Google Scholar] [CrossRef]
- Bui, M.N.; Pokern, Y.; Dellaportas, P. Inference for partially observed Riemannian Ornstein–Uhlenbeck diffusions of covariance matrices. arXiv 2021, arXiv:2104.03193. [Google Scholar]
- Delyon, B.; Hu, Y. Simulation of Conditioned Diffusion and Application to Parameter Estimation. Stoch. Process. Their Appl. 2006, 116, 1660–1675. [Google Scholar] [CrossRef]
- Jensen, M.H.; Mallasto, A.; Sommer, S. Simulation of Conditioned Diffusions on the Flat Torus. In Proceedings of the International Conference on Geometric Science of Information, Toulouse, France, 27–29 August 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 685–694. [Google Scholar]
- Jensen, M.H.; Sommer, S. Simulation of Conditioned Semimartingales on Riemannian Manifolds. arXiv 2021, arXiv:2105.13190. [Google Scholar]
- Van der Meulen, F.; Schauer, M. Bayesian estimation of discretely observed multi-dimensional diffusion processes using guided proposals. Electron. J. Stat. 2017, 11, 2358–2396. [Google Scholar] [CrossRef]
- Papaspiliopoulos, O.; Roberts, G. Importance sampling techniques for estimation of diffusion models. Stat. Methods Stoch. Differ. Equ. 2012, 311–340. [Google Scholar]
- Schauer, M.; Van Der Meulen, F.; Van Zanten, H. Guided proposals for simulating multi-dimensional diffusion bridges. Bernoulli 2017, 23, 2917–2950. [Google Scholar] [CrossRef]
- Sommer, S.; Arnaudon, A.; Kuhnel, L.; Joshi, S. Bridge Simulation and Metric Estimation on Landmark Manifolds. In Proceedings of the Graphs in Biomedical Image Analysis, Computational Anatomy and Imaging Genetics, Lecture Notes in Computer Science, Quebec, QC, Canada, 10–14 September 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 79–91. [Google Scholar]
- Bui, M.N. Inference on Riemannian Manifolds: Regression and Stochastic Differential Equations. Ph.D. Thesis, UCL (University College London), London, UK, 2022. [Google Scholar]
- Fisher, R. Dispersion on a Sphere. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1953, 217, 295–305. [Google Scholar] [CrossRef]
- Kent, J.T. The Fisher-Bingham Distribution on the Sphere. J. R. Stat. Soc. Ser. B (Methodol.) 1982, 44, 71–80. [Google Scholar] [CrossRef]
- Thompson, J. Brownian bridges to submanifolds. Potential Anal. 2018, 49, 555–581. [Google Scholar] [CrossRef]
- García-Portugués, E.; Sørensen, M.; Mardia, K.V.; Hamelryck, T. Langevin Diffusions on the Torus: Estimation and Applications. Stat. Comput. 2017, 29, 1–22. [Google Scholar] [CrossRef]
- Hamelryck, T.; Kent, J.T.; Krogh, A. Sampling Realistic Protein Conformations Using Local Structural Bias. PLoS Comput. Biol. 2006, 2, e131. [Google Scholar] [CrossRef] [PubMed]
- Pennec, X.; Fillard, P.; Ayache, N. A Riemannian Framework for Tensor Computing. Int. J. Comput. Vis. 2006, 66, 41–66. [Google Scholar] [CrossRef]
- Vaillant, M.; Miller, M.; Younes, L.; Trouvé, A. Statistics on Diffeomorphisms via Tangent Space Representations. NeuroImage 2004, 23, S161–S169. [Google Scholar] [CrossRef]
- Yang, L. Means of Probability Measures in Riemannian Manifolds and Applications to Radar Target Detection. Ph.D. Thesis, Poitiers University, Poitiers, France, 2011. [Google Scholar]
- Grenander, U. Probabilities on Algebraic Structures; Wiley: New York, NY, USA/London, UK, 1963. [Google Scholar]
- Jensen, M.H.; Joshi, S.; Sommer, S. Bridge Simulation and Metric Estimation on Lie Groups. In Proceedings of the Geometric Science of Information; Lecture Notes in Computer Science; Nielsen, F., Barbaresco, F., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 430–438. [Google Scholar] [CrossRef]
- Pennec, X.; Sommer, S.; Fletcher, T. Riemannian Geometric Statistics in Medical Image Analysis; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Liao, M. Lévy Processes in Lie Groups; Cambridge University Press: Cambridge, UK, 2004; Volume 162. [Google Scholar]
- Shigekawa, I. Transformations of the Brownian motion on a Riemannian symmetric space. In Zeitschrift für Wahrscheinlichkeitstheorie und Verwandte Gebiete; 1984; pp. 493–522. [Google Scholar]
- Kendall, W.S. The radial part of Brownian motion on a manifold: A semimartingale property. Ann. Probab. 1987, 15, 1491–1500. [Google Scholar] [CrossRef]
- Barden, D.; Le, H. Some consequences of the nature of the distance function on the cut locus in a Riemannian manifold. J. LMS 1997, 56, 369–383. [Google Scholar] [CrossRef]
- Le, H.; Barden, D. Itô correction terms for the radial parts of semimartingales on manifolds. Probab. Theory Relat. Fields 1995, 101, 133–146. [Google Scholar] [CrossRef]
- Hsu, E.P. Stochastic Analysis on Manifolds; AMS: Providence, RI, USA, 2002; Volume 38. [Google Scholar]
- Thompson, J. Submanifold Bridge Processes. Ph.D. Thesis, University of Warwick, Coventry, UK, 2015. [Google Scholar]
- Hansen, P.; Eltzner, B.; Huckemann, S.F.; Sommer, S. Diffusion Means in Geometric Spaces. arXiv 2021, arXiv:2105.12061. [Google Scholar]
- Hansen, P.; Eltzner, B.; Sommer, S. Diffusion Means and Heat Kernel on Manifolds. arXiv 2021, arXiv:2103.00588. [Google Scholar]
- Kühnel, L.; Sommer, S.; Arnaudon, A. Differential Geometry and Stochastic Dynamics with Deep Learning Numerics. Appl. Math. Comput. 2019, 356, 411–437. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jensen, M.H.; Joshi, S.; Sommer, S. Discrete-Time Observations of Brownian Motion on Lie Groups and Homogeneous Spaces: Sampling and Metric Estimation. Algorithms 2022, 15, 290. https://doi.org/10.3390/a15080290
Jensen MH, Joshi S, Sommer S. Discrete-Time Observations of Brownian Motion on Lie Groups and Homogeneous Spaces: Sampling and Metric Estimation. Algorithms. 2022; 15(8):290. https://doi.org/10.3390/a15080290
Chicago/Turabian StyleJensen, Mathias Højgaard, Sarang Joshi, and Stefan Sommer. 2022. "Discrete-Time Observations of Brownian Motion on Lie Groups and Homogeneous Spaces: Sampling and Metric Estimation" Algorithms 15, no. 8: 290. https://doi.org/10.3390/a15080290
APA StyleJensen, M. H., Joshi, S., & Sommer, S. (2022). Discrete-Time Observations of Brownian Motion on Lie Groups and Homogeneous Spaces: Sampling and Metric Estimation. Algorithms, 15(8), 290. https://doi.org/10.3390/a15080290