
The Importance of Modeling Path Choice Behavior in the Vehicle Routing Problem

Abstract
:1. Introduction
- (1)
- A path is a set of consecutive and loopless transport network links connecting two consecutive nodes of the route; between two nodes, one or more paths can be perceived; the path choice is studied with the path choice problem (PCP);
- (2)
- A route is an ordered list of network nodes (in the case of freight for pick-up and delivery activities) to be visited following paths; the optimal routes are studied with the vehicle routing problem (VRP).
- (1)
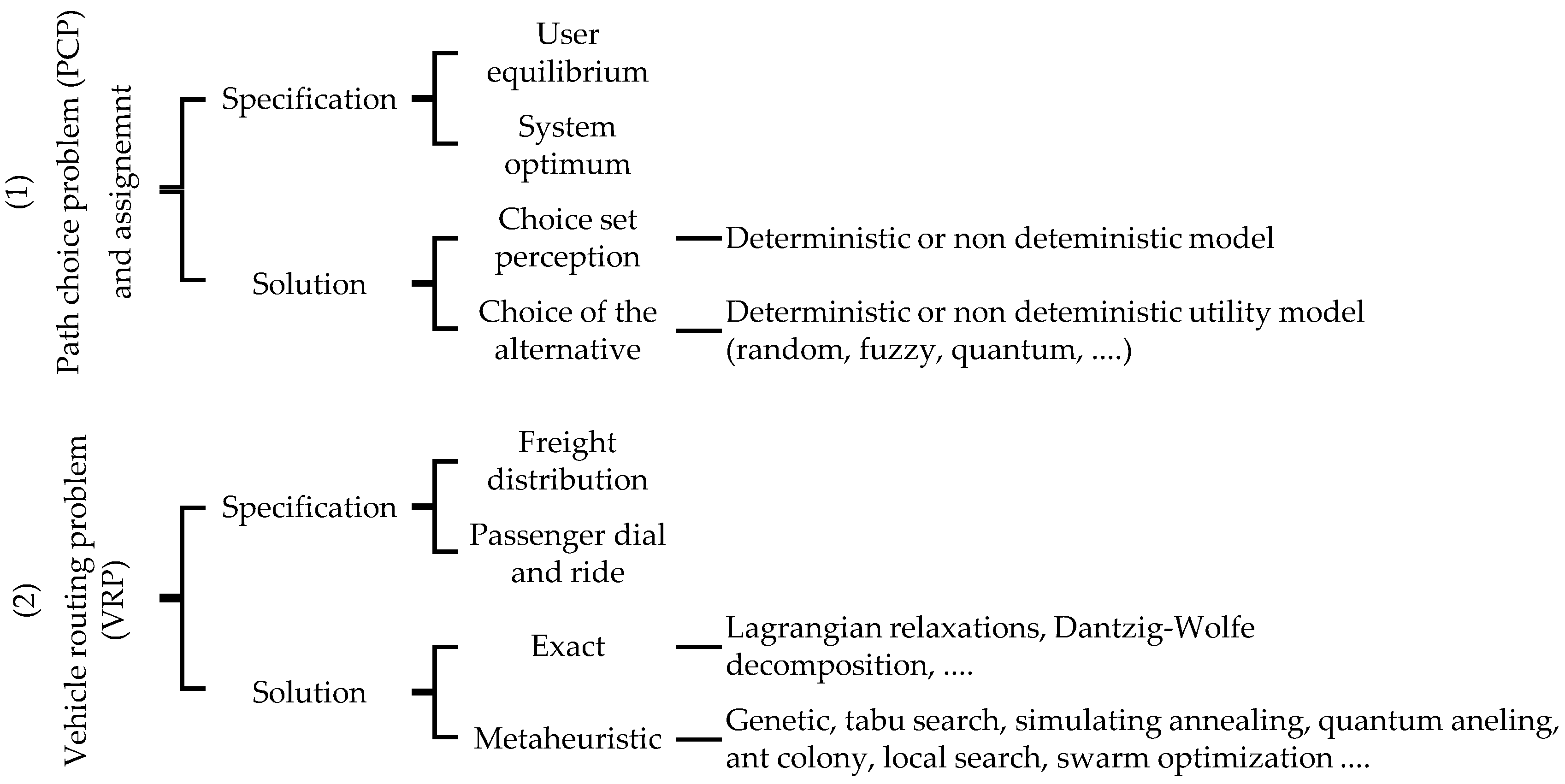
- The PCP has the main objective of finding the paths taken by users, given two consecutive pick-up and delivery nodes. In the transport demand assignment to the network, the path choice follows [1] a user equilibrium approach (Wardrop’s first principle [1]) and does not follow an optimal system approach (Wardrop’s second principle [1]). The Wardrop’s first principle provides that each user moves by maximizing his utility function; the system reaches a user equilibrium condition in which no user can improve its utility by a unilateral decision. Wardrop’s second principle considers that users choose cooperatively by maximizing the sum of all users’ utilities; the system reaches the optimum system configuration. In uncongested networks, the two configurations give the same overall utility; in congested networks the optimum configuration of the system generates an overall utility for users greater than or equal to that obtained with the user equilibrium configuration. Wardrop’s first principle is applied at the network level within the assignment problem [1,2,3]. The PCP can be modeled with Mansky’s [4] formulation and two submodels are included: the perception model related to the choice set of alternatives [5] and the choice model related to each alternative [6]. The PCP output is the choice probability or rate for each path of the choice set of alternatives with deterministic or nondeterministic utility models (more details are reported in Section 3).
- (2)
- The VRP has the main objective of finding the best set of vehicles, routes and paths to follow in the context of transport problems (e.g., freight distribution, dial and ride for passengers, etc.). The problem specified for different transport modes, i.e., cars, buses and trucks [7], freight [8,9], dial and ride [10,11,12], and it is solved with exact or heuristic procedures [13]. Exact solutions can be applied for a small system in acceptable processing time and are based on Lagrangian relaxations or on the Dantzig–Wolfe decomposition. Some papers related to Lagrangian relaxations proposed adopting a branch-and-bound technique [14] or a branch algorithm [15]. Some papers related to the Dantzig–Wolfe decomposition proposed semisoft time windows [16] or rigid time windows [17]. The heuristic solution can be applied for real-size transport systems for the VRP solution in acceptable processing time and in most cases are based on natural metaheuristics procedures. Some papers related to the use of heuristic algorithms proposed adopting a parallel genetic approach [18,19], a tabu search algorithm [20], simulated annealing [21], quantum annealing [22], an ant colony [23], a local search [24], a swarm optimization [25].
2. Transport System Analysis
- SC and communities that is a partnership across the areas of (i.) transport, (ii.) information and communication and (iii.) energy [26];
- ITS resulting from the integration of knowledge in the areas of (a.) decision support systems (DSS) in transport and (b.) information and communication technologies (ICT).
2.1. Actors
- A.
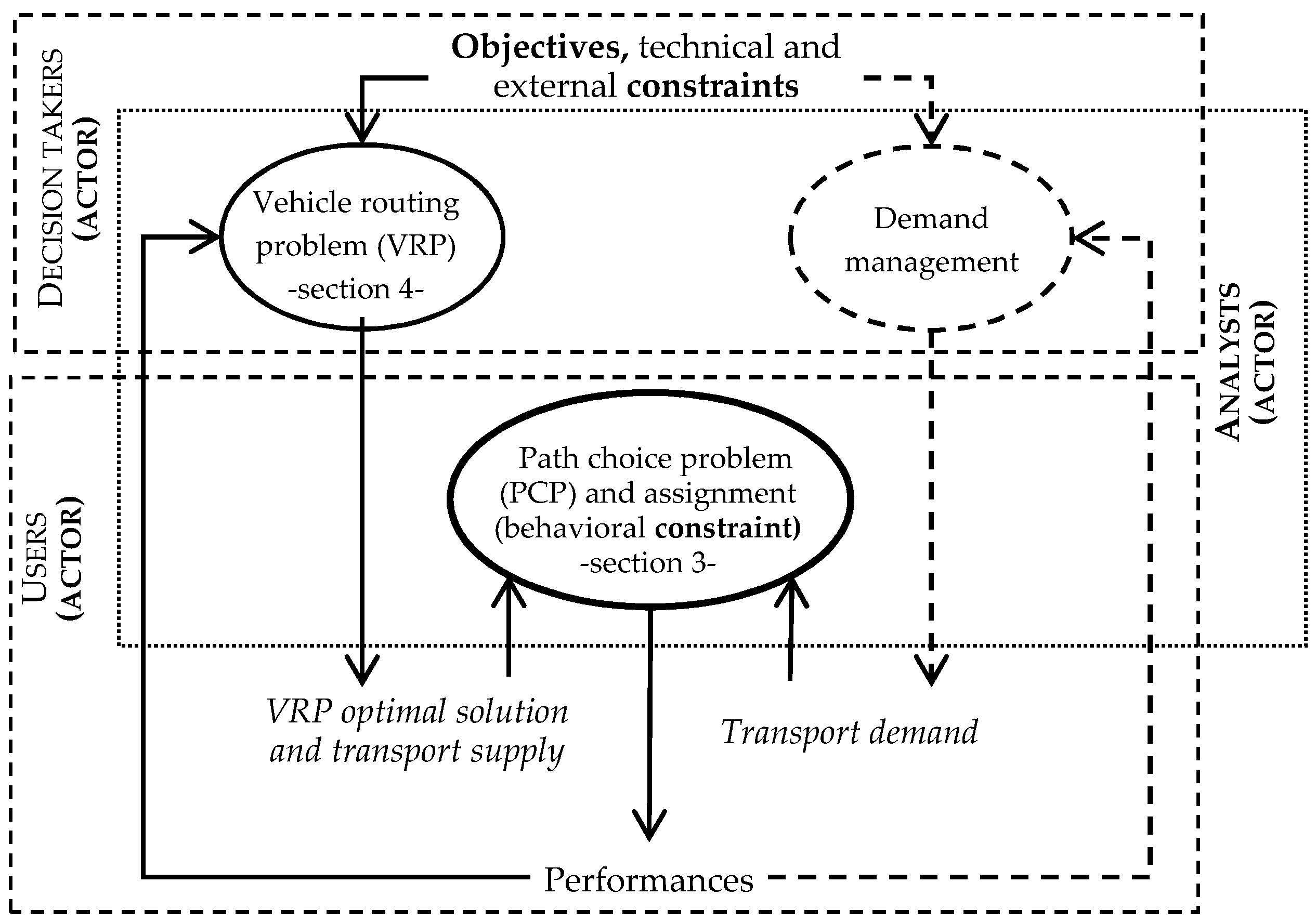
- Decision-takers define the objectives to be achieved and define (or must respect) constraints of a technical or regulatory nature; they also take the policy decisions to be implemented for the vehicle routing problem and/or for demand management;
- B.
- Analysts specify and apply models and procedures for the analysis of the supply–demand interaction (the analysis of network performance with supply models, user behavior with demand models; interactions with supply–demand interaction models), the network design (i.e., a better configuration of the transport network in terms of topology and capacity, vehicle routing reported in this document); demand management (i.e., information on the expected status of the transport system); they also make technical decisions to support decision takers;
- C.
- Users (citizen) move in the transport system and make pretrip and en route decisions (user behavior) in relation to the supply performance, experience and information received on the system state; users move on the supply designed and the latter is influenced by demand management actions.
2.2. Objectives and Constraints
- (i.) Transport, (ii.) information and communication and (iii.) energy when considering SC;
- (a.) DSS and (b.) ICT when considering ITS;
- (I.) Economic, (II.) environmental and (III.) social criteria when considering sustainability;
- (A.) Decision-takers, (B.) analysts and (C.) users when considering the involved actors.
2.3. Method Proposed
3. Path Choice Problem and Assignment (Behavioral Constraint)
3.1. Definitions and Notations
3.1.1. Path Choice
- Users:
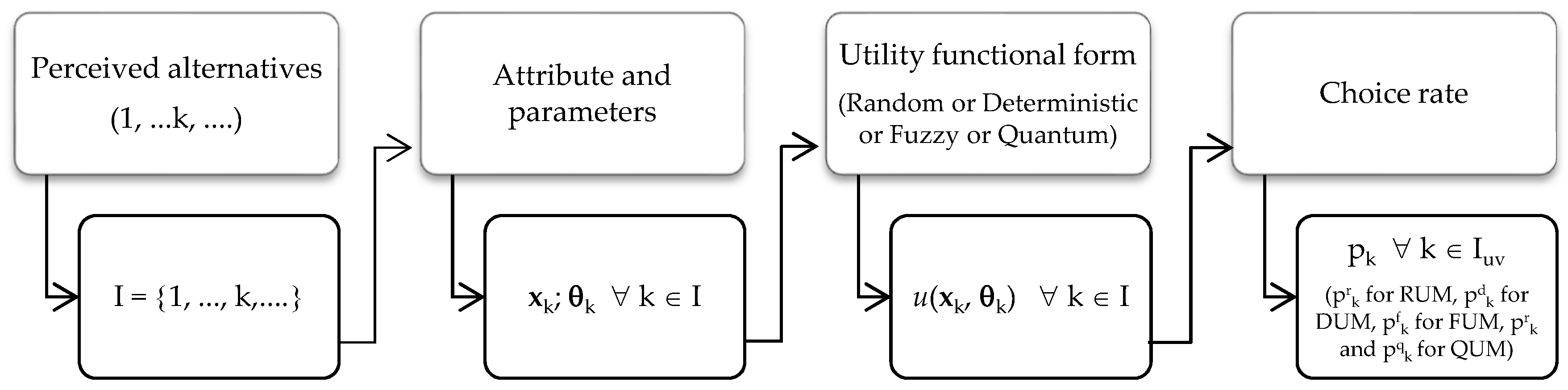
- Perceive a set (Iuv) of alternatives (k); Iuv = {…, …, k, …} is the set of paths perceived by the decision-maker (system manager or driver) connecting nodes u and v; the entry k of the set Iuv is a perceived path;
- Associate a perceived utility (uk) to each perceived alternative k; the perceived function (υk) depends on its functional specification, on a vector of known or estimated quantitative attributes of the alternative (xk) and on a vector of unknown parameters (θk) to be calibrated uk = υk(xk, θk);
- Analysts:
- Hypothesize that users’ choice among perceived paths is modelled by discrete choice and utility theories, and they evaluate the perceived choice rate vector puv = […, …., pk, …] connecting all pairs of nodes u and v as a function of the perceived utility uk = υk(xk, θk) associated to any path;
- The perceived choice rate depends on the vector of unknown parameters (θk) to be estimated starting from the data observed with a disaggregated approach (interviews with a sample of users [27], in the state and in the revealed scenarios) or aggregated (traffic flow [27] and web sentiment [28] in the state scenario) by adopting a classic (i.e., maximum likelihood [27]) or Bayesian [28,29] estimator.
3.1.2. Behavioral Constraint
- f = […, fl, …]’ the traffic flow vector of the links with entry fl, the traffic flow on the link l;
- c = […, cl, …]’ the cost vector of the links with cl the generalized cost on the link l; it depends on the flow;
- guv = […, gk, …]’ the generalized path cost vector perceived by the users that connects the pairs of nodes u and v;
- g = […, guv’, …]’ the vector with all the guv;
- d = […, duvz, …]’ the demand flow vector; the entry duvz is the demand between origin u, destination v and homogenous class z; note that the demand and the choice rate consider all classes of users, including those who do not belong to the VRP;
- p = […, puv’, …]’ the rate choice vector (described in Section 3) of the path perceived by the decision-maker (system manager or driver) that connects all the pairs of nodes u and v.
3.2. Models
3.2.1. Path Choice
- A deterministic utility model (DUM), assuming a perceived deterministic utility function; a choice percentage (pdk) is obtained;
- A random utility model (RUM) assuming a perceived random utility function; a choice probability (prk) is obtained;
- A fuzzy utility model (FUM) assuming a perceived fuzzy utility function; a fuzzy possibility (pfk) is obtained;
- A quantum utility model (QUM) assuming a perceived quantum utility function; a random choice probability (prk) and an interference term (pqk) are obtained.
3.2.2. Behavioral Constraint
- Link flow–link cost
- Link cost–path cost
- Path cost–path choice
- In the DUM, it is assumed that each user, for each alternative k, from u to v, perceives a deterministic utility given by the linear combination (vk = θk’ xk) of the attributes (xk) with respect to the parameter (θk). Users choose the alternative of greatest perceived utility. In nondeterministic models it is assumed that each user:
- Perceives a nondeterministic utility (uk) with expected (or barycenter) value (vk=E(uk)) given by the linear combination of the attributes with respect to the parameter (vk = θk’ xk);
- Chooses the alternative of maximum perceived utility, and the analyst can evaluate the choice rate (pk) for each alternative (k) belonging to the perceived choice set (Irs).
- Path cost–demand
- Demand–flow
3.3. Discussion
4. Vehicle Routing Problem
4.1. Definitions and Notations
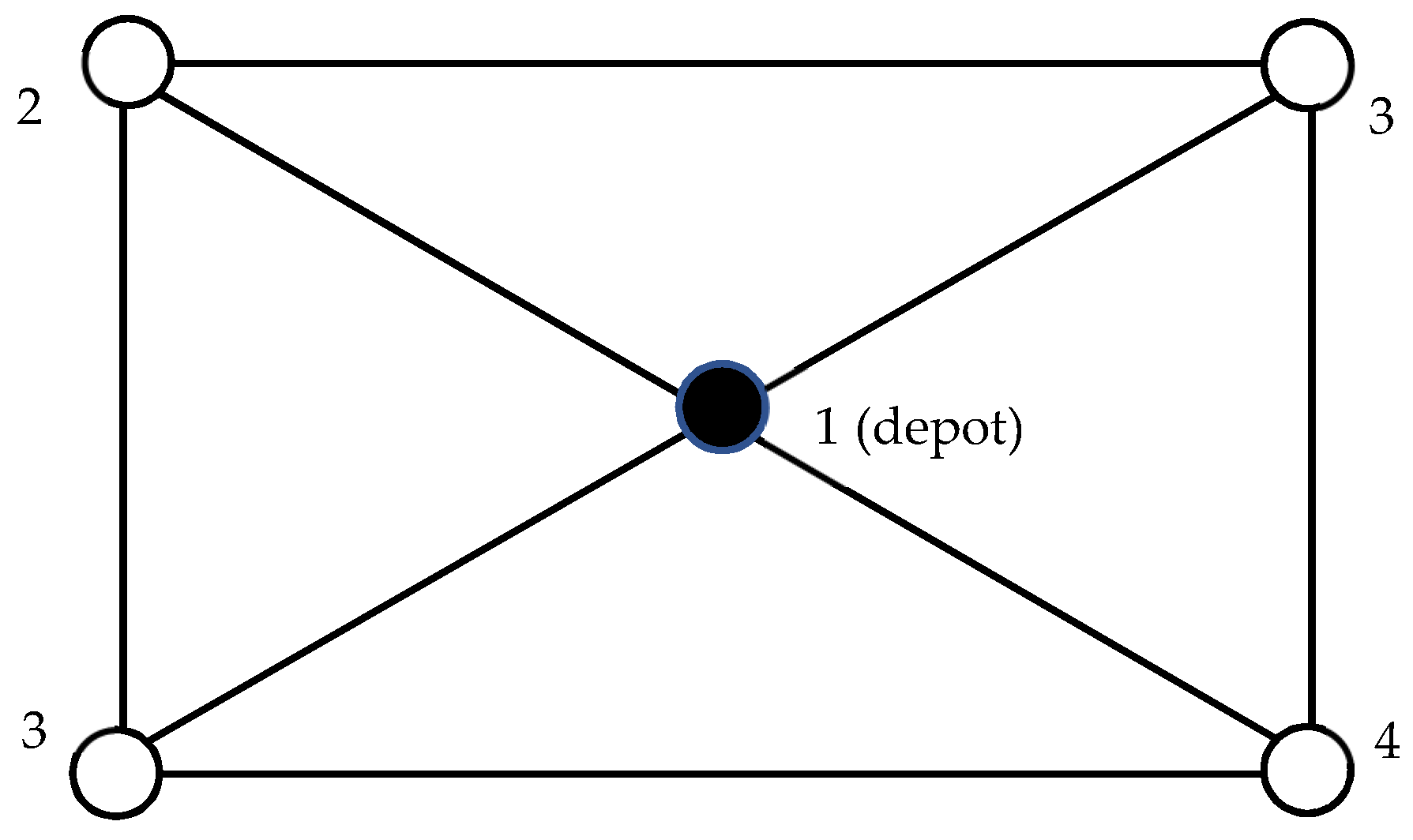
- r and s are two pick-up and delivery points to be served by the VRP;
- Ω = [[… ωv,rs…]] is the matrix of routes defined in term of sequences of nodes to be visited by a set of vehicles; the entry ωv,rs of the matrix Ω is equal to one if the vehicle v connects the nodes r and s, and it is zero otherwise;
- g(VRP) = […, g(VRP)rs’, …]’ with g(VRP)rs = […, g(VRP)k, …]’ the generalized path cost vector perceived by the decision-maker (system manager or driver) connecting the pairs of nodes r and s to be visited for pick-up and delivery;
- p(VRP) = […, p(VRP)rs’, …]’ with p(VRP)rs = […, p(VRP)k, …]’ the vector of path rate connecting the pairs of nodes r and s to be visited for pick-up and delivery;
- z(f, Ω, g(VRP), p(VRP), t) = […, zb(f, Ω, g(VRP), p(VRP)), …]’ is the multicriteria objective function with entry zb() relative to the generic criteria adopted in the multicriteria optimization;
- STE is the set of feasible technical and external constraints;
- Sf is the set of admissible flow (i.e., non-negative, congruent with the passenger and freight demand on the routes, paths and nodes).
4.2. Models
4.3. Discussion
- In the DUM, for each pair of pick-up and delivery nodes, the generalized minimum cost is:
- In the RUM, the FUM and the QUM, which best represent reality, a rate choice is evaluated for each perceived path and some indicators must be evaluated (i.e., the expected perceived cost for all paths or for the path with a rate choice higher than a threshold or a path that satisfies a decision criterion); if the expected cost values for all the perceived paths are considered, the generalized cost is:
| Nodes | 1 | 2 | 3 | 4 | 5 | |
| 1 | -- | 8.2 | 2.2 | 1.4 | 6.4 | |
| 2 | 9.1 | -- | 9.0 | 9.5 | 6.7 | |
| G(1) = | 3 | 2.5 | 9.9 | -- | 3.0 | 8.5 |
| 4 | 1.6 | 10.0 | 3.3 | -- | 6.7 | |
| 5 | 7.0 | 7.4 | 9.3 | 7.4 | -- |
| Nodes | 1 | 2 | 3 | 4 | 5 | Nodes | 1 | 2 | 3 | 4 | 5 | ||
| 1 | -- | 9.1 | 2.5 | 2.1 | 7.0 | 1 | -- | 9.9 | 2.7 | 2.8 | 7.7 | ||
| 2 | 10.0 | -- | 9.9 | 10.0 | 7.4 | 2 | 11.0 | -- | 11.0 | 11.0 | 8.0 | ||
| G(2) = | 3 | 2.7 | 11,0 | -- | 3.3 | 9.3 | G(3) = | 3 | 3.0 | 12.0 | -- | 3.6 | 10.0 |
| 4 | 1.7 | 11,0 | 3.6 | -- | 7.4 | 4 | 1.9 | 13.0 | 4.0 | -- | 8.0 | ||
| 5 | 7.7 | 8.1 | 10.0 | 8.1 | -- | 5 | 8.5 | 8.9 | 11.0 | 8.9 | -- |
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
References
- Wardrop, J.G. Some Theoretical Aspects of Road Traffic Research. Proc. Inst. Civ. Eng. 1952, 1, 325–362. [Google Scholar] [CrossRef]
- Dial, R.B. A probabilistic multipath traffic assignment algorithm which obviates path enumeration. Transp. Res. 1971, 5, 83–111. [Google Scholar] [CrossRef]
- Daganzo, C.F.; Sheffi, Y. On Stochastic Models of Traffic Assignment. Transp. Sci. 1977, 11, 253–274. [Google Scholar] [CrossRef] [Green Version]
- Manski, C.F. The structure of random utility models. Theory Decis. 1977, 8, 229–254. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Bergman, M.J.; Daly, A.J.; Ramaswamy, R. Modelling inter urban route choice behaviour. In Proceedings of the Ninth International Symposium on Transportation and Traffic Theory, Delft, The Netherlands, 11–13 July 1984; Volmuller, J., Hamerslag, R., Eds.; CRC Press: Boca Raton, FL, USA, 1984; pp. 299–330. [Google Scholar]
- Ben-Akiva, M.E.; Lerman, S.R. Discrete Choice Analysis. Theory and Application to Travel Demand. MIT Press Series in Transportation Studies; Manheim, M., Ed.; MIT Press Ltd.: Cambridge, MA, USA, 2018. [Google Scholar]
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Vidal, T.; Laporte, G.; Matl, P. A concise guide to existing and emerging vehicle routing problem variants. Eur. J. Oper. Res. 2020, 286, 401–416. [Google Scholar] [CrossRef] [Green Version]
- Napoli, G.; Micari, S.; Dispenza, G.; Andaloro, L.; Antonucci, V.; Polimeni, A. Freight distribution with electric vehicles: A case study in Sicily. RES, infrastructures and vehicle routing. Transp. Eng. 2021, 3, 100047. [Google Scholar] [CrossRef]
- Cordeau, J.-F. A Branch-and-Cut Algorithm for the Dial-a-Ride Problem. Oper. Res. 2006, 54, 573–586. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.-W.; Hu, T.-Y.; Wu, Y.-W. A bi-objective model for eco-efficient dial-a-ride problems. Asia Pac. Manag. Rev. 2022, 27, 163–172. [Google Scholar] [CrossRef]
- Chu, J.C.-Y.; Chen, A.Y.; Shih, H.-H. Stochastic programming model for integrating bus network design and dial-a-ride scheduling. Transp. Lett. 2020, 14, 245–257. [Google Scholar] [CrossRef]
- Laporte, G. What you should know about the vehicle routing problem. Nav. Res. Logist. 2007, 54, 811–819. [Google Scholar] [CrossRef]
- Fisher, M.L. Optimal Solution of Vehicle Routing Problems Using Minimum K-Trees. Oper. Res. 1994, 42, 626–642. [Google Scholar] [CrossRef]
- Kallehauge, B.; Larsen, J.; Madsen, O.B. Lagrangian duality applied to the vehicle routing problem with time windows. Comput. Oper. Res. 2006, 33, 1464–1487. [Google Scholar] [CrossRef]
- Qureshi, A.; Taniguchi, E.; Yamada, T. An exact solution approach for vehicle routing and scheduling problems with soft time windows. Transp. Res. Part E Logist. Transp. Rev. 2009, 45, 960–977. [Google Scholar] [CrossRef]
- Azi, N.; Gendreau, M.; Potvin, J.-Y. An exact algorithm for a single-vehicle routing problem with time windows and multiple routes. Eur. J. Oper. Res. 2007, 178, 755–766. [Google Scholar] [CrossRef]
- Allahviranloo, M.; Chow, J.Y.; Recker, W.W. Selective vehicle routing problems under uncertainty without recourse. Transp. Res. Part E Logist. Transp. Rev. 2014, 62, 68–88. [Google Scholar] [CrossRef]
- Abbasi, M.; Rafiee, M.; Khosravi, M.R.; Jolfaei, A.; Menon, V.G.; Koushyar, J.M. An efficient parallel genetic algorithm solution for vehicle routing problem in cloud implementation of the intelligent transportation systems. J. Cloud Comput. 2020, 9, 1–14. [Google Scholar] [CrossRef]
- Gribkovskaia, I.; Laporte, G.; Shyshou, A. The single vehicle routing problem with deliveries and selective pickups. Comput. Oper. Res. 2008, 35, 2908–2924. [Google Scholar] [CrossRef]
- Tavakkoli-Moghaddam, R.; Safaei, N.; Gholipour, Y. A hybrid simulated annealing for capacitated vehicle routing problems with the independent route length. Appl. Math. Comput. 2006, 176, 445–454. [Google Scholar] [CrossRef]
- Syrichas, A.; Crispin, A. Large-scale vehicle routing problems: Quantum Annealing, tunings and results. Comput. Oper. Res. 2017, 87, 52–62. [Google Scholar] [CrossRef]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Rivera, J.C.; Afsar, H.M.; Prins, C. A multistart iterated local search for the multitrip cumulative capacitated vehicle routing problem. Comput. Optim. Appl. 2014, 61, 159–187. [Google Scholar] [CrossRef]
- Marinaki, M.; Marinakis, Y. A Glowworm Swarm Optimization algorithm for the Vehicle Routing Problem with Stochastic Demands. Expert Syst. Appl. 2016, 46, 145–163. [Google Scholar] [CrossRef]
- European Commission, Smart cities and communities—European innovation partnership, Communication from the Commission, C(2012) 4701, 2012. Available online: https://digital-strategy.ec.europa.eu/en/library/smart-cities-and-communities-european-innovation-partnership-communication-commission-c2012-4701 (accessed on 3 January 2023).
- Cascetta, E. Transportation Systems Engineering: Theory and Methods; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Vitetta, A. Sentiment Analysis Models with Bayesian Approach: A Bike Preference Application in Metropolitan Cities. J. Adv. Transp. 2022, 2022, 2499282. [Google Scholar] [CrossRef]
- Washington, S.; Congdon, P.; Karlaftis, M.G.; Mannering, F.L. Bayesian Multinomial Logit: Theory and Route Choice Example. Transportation Research Record. J. Transp. Res. Board 2009, 2136, 28–36. [Google Scholar] [CrossRef]
- Henn, V. Path choice making under uncertainty: A fuzzy logic based approach. In Fuzzy Sets-Based Heuristics for Optimization; Verdegay, J., Ed.; Springer: New York, NY, USA, 2003; pp. 277–292. [Google Scholar]
- Henn, V.; Ottomanelli, M. Handling uncertainty in route choice models: From probabilistic to possibilistic approaches. Eur. J. Oper. Res. 2006, 175, 1526–1538. [Google Scholar] [CrossRef]
- Busemeyer, J.R.; Wang, Z.; Townsend, J.T. Quantum dynamics of human decision-making. J. Math. Psychol. 2006, 50, 220–241. [Google Scholar] [CrossRef]
- Lipovetsky, S. Quantum paradigm of probability amplitude and complex utility in entangled discrete choice modeling. J. Choice Model. 2018, 27, 62–73. [Google Scholar] [CrossRef]
- Vitetta, A. A quantum utility model for route choice in transport systems. Travel Behav. Soc. 2016, 3, 29–37. [Google Scholar] [CrossRef]
- Di Gangi, M.; Vitetta, A. Quantum utility and random utility model for path choice modelling: Specification and aggregate calibration from traffic counts. J. Choice Model. 2021, 40, 100290. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Watling, D.P.; de Luca, S.; Di Pace, R. Dynamics and Stochasticity in Transportation Systems; Tools for Transportation Network Modelling; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Binetti, M.G. Stochastic Assignment with Gammit Path Choice Models. In Transportation Planning; Patriksson, M., Labbé, M., Eds.; Applied Optimization; Springer: Boston, MA, USA, 2002; Volume 64. [Google Scholar]
- de Luca, S. Discrete choice modelling with application to route and departure time choice. In Dynamics and Stochasticity in Transportation Systems; Tools for Transportation Network Modelling; Cantarella, G.E., Watling, D.P., de Luca, S., Di Pace, R., Eds.; Appendix A; Elsevier: Amsterdam, The Netherlands, 2020; pp. 195–263. [Google Scholar]
- Klir, G.J. A principle of uncertainty and information invariance*. Int. J. Gen. Syst. 1990, 17, 249–275. [Google Scholar] [CrossRef]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Route and Path Choices of Freight Vehicles: A Case Study with Floating Car Data. Sustainability 2020, 12, 8557. [Google Scholar] [CrossRef]
- Kong, S.; Zhong, Z.; Zhang, J. Bi-objective vehicle routing problems with path choice and variable speed. Complex Syst. Complex. Sci. 2022, 19, 74–80. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Utility Model (UM) | Name | Perceived Utility Function υk(xk, θk) | DUM, RUM, FUM, QUM Evaluation | Choice Rate pk | Starting from Random Utility |
|---|---|---|---|---|---|
| Deterministic (DUM) | pdk | Deterministic utility function | pdk ≥ 0 for the alternative of maximum utility with Σk pdk = 100% | pk = pdk | Limit with zero variance |
| Random (RUM) | prk | Continuous random utility function | prk = pr(υk(xk, θk) > υh(xh, θh), ∀ k,h∈I) (pr means probability) | pk = prk | Same |
| Fuzzy (FUM) | pfk | Continuous fuzzy utility number | pfk = po(υk(xk, θk) > υh(xh, θh), ∀ k,h∈I) (po means possibility) | pk = (pfk)γ/Σh∈I(pfh)γ | Nonlinear transformation (possibility vs. probability) |
| Quantum (QUM) | pqk | Quantum Utility function with interference | pqk = interference(pr, α) (it respects pqk ∈ [–prk; 1−prk] and Σk pqk = 0%) | pk = prk + pqk | Additive term (quantum vs. probability) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitetta, A. The Importance of Modeling Path Choice Behavior in the Vehicle Routing Problem. Algorithms 2023, 16, 47. https://doi.org/10.3390/a16010047
Vitetta A. The Importance of Modeling Path Choice Behavior in the Vehicle Routing Problem. Algorithms. 2023; 16(1):47. https://doi.org/10.3390/a16010047
Chicago/Turabian StyleVitetta, Antonino. 2023. "The Importance of Modeling Path Choice Behavior in the Vehicle Routing Problem" Algorithms 16, no. 1: 47. https://doi.org/10.3390/a16010047
APA StyleVitetta, A. (2023). The Importance of Modeling Path Choice Behavior in the Vehicle Routing Problem. Algorithms, 16(1), 47. https://doi.org/10.3390/a16010047