
Survey of Recent Applications of the Chaotic Lozi Map


Abstract
:1. Introduction
2. The Lozi Chaotic Map
2.1. Origin
2.2. Classic Chaotic Properties of the Dissipative Map (|b| < 1)
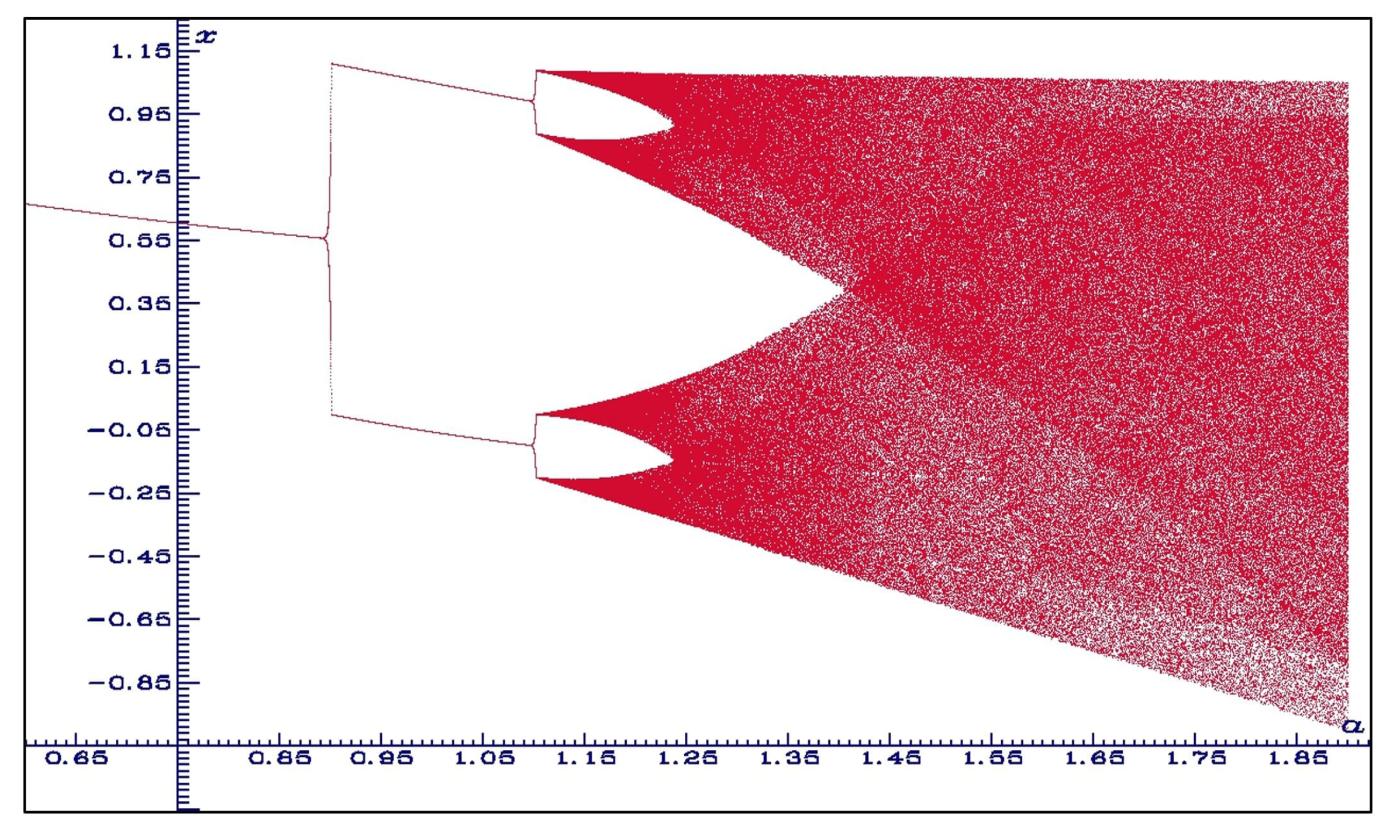
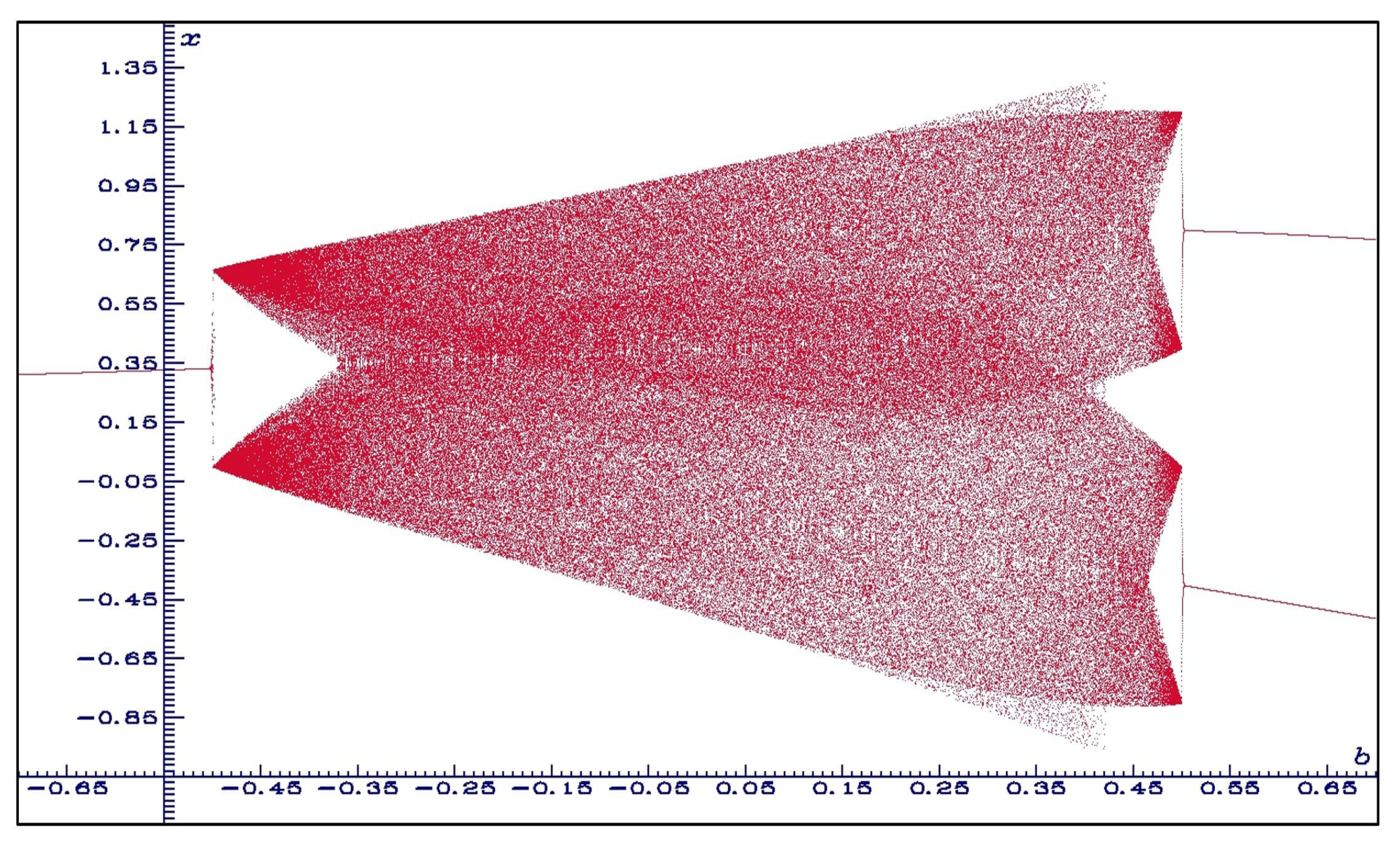
2.2.1. Domain of Existence of Strange Attractor
2.2.2. Fixed Points, Invariant Manifolds, and Basin of Attraction
2.3. Advanced Dynamical Properties of the Dissipative Map (|b| < 1)
- -
- The union of the transversal homoclinic points and weak transversal homoclinic points is dense in
- -
- All periodic points are hyperbolic
- -
- The set of periodic points forms a dense set in
- -
- Any two hyperbolic points forms a transversal heteroclinic cycle or a weak transversal heteroclinic cycle
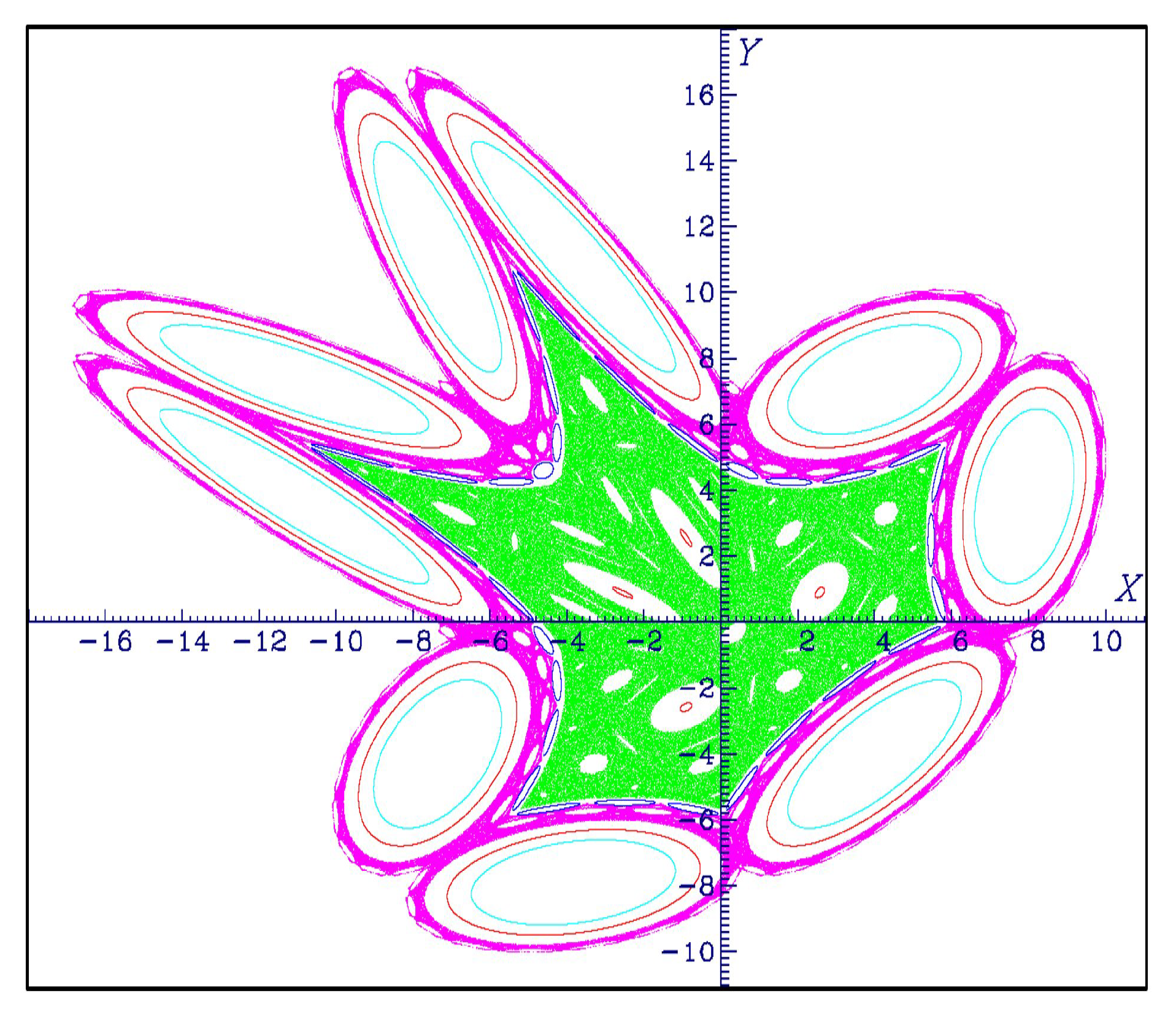
2.4. Chaotic Properties of the Conservative Map (|b| = 1)
2.5. Fractional Lozi Map
2.5.1. Classic Fractional Lozi Map
2.5.2. Variable Fractional Lozi Map
2.5.3. Complex Fractional Map
3. The Use of the Lozi Map in Electrical Devices, Memristors, and Computers
3.1. Chaos from Switched-Capacitor Circuits
3.2. Multiple Access Communication Based on Control of Special Chaotic Trajectories
3.3. Memristors
3.3.1. Memristor-Based Lozi Map with Hidden Hyperchaos
3.3.2. 3D Fractional Memristor-Based Lozi Map
3.4. Chaotic Interleaver for Turbo Codes
- Step 1: the integer sequence is mapped to a real number sequence using (3).
- Step 2: is mapped to another integer sequence by designing as the position of index of in the sort ascending of .
- Step 3: the chaotic interleaver indexes are provided by .
4. Applications in Optimization
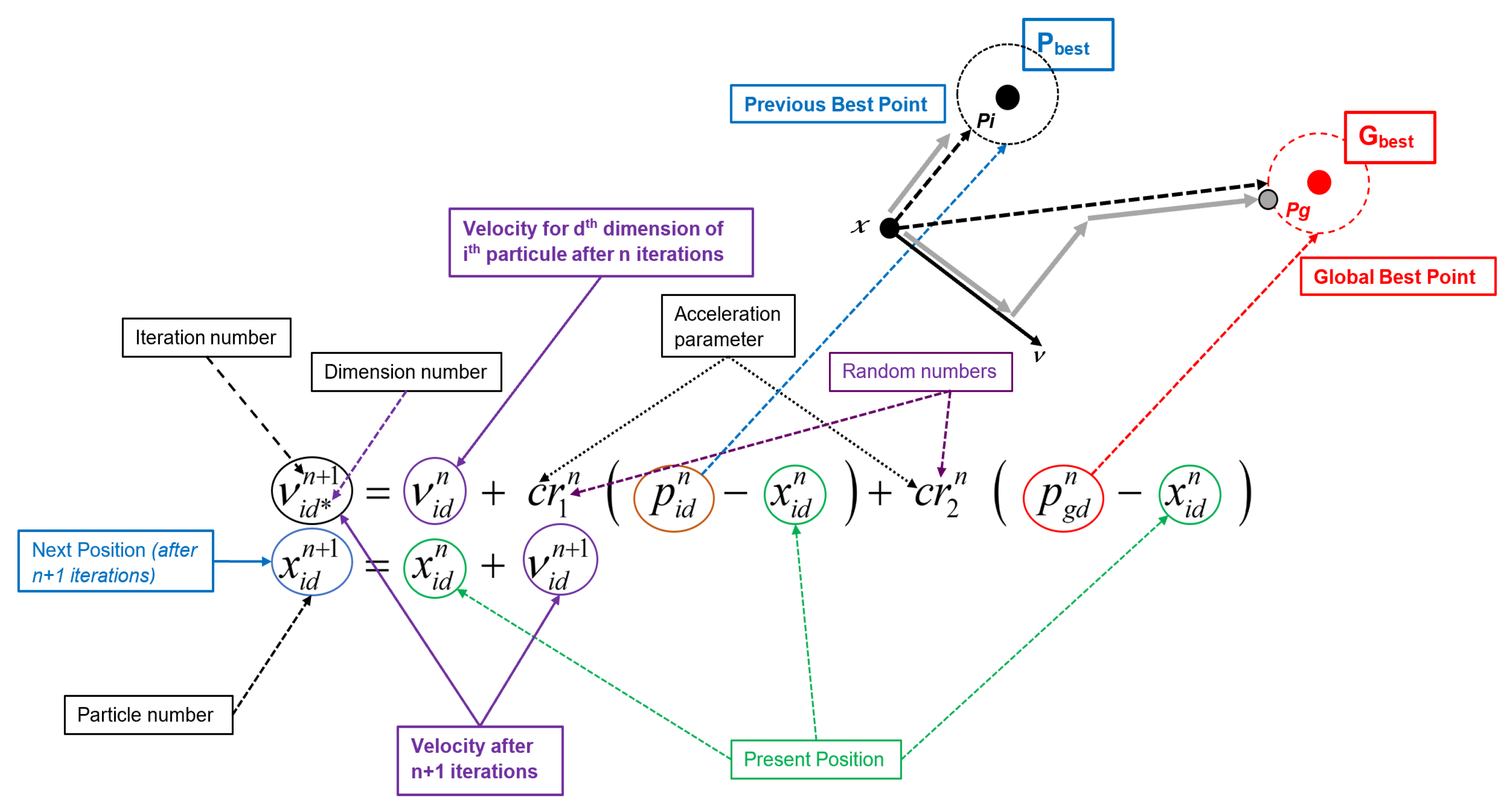
4.1. Particle Swarm Optimization (PSO)
4.1.1. Thermal Vacuum System
4.1.2. Pid Controller Using PSO
- -
- The integral of the time multiplied by absolute error (ITAE):where is the control error (see [63]).
- -
- The integral of the absolute magnitude of the error (IAE):
- -
- The integral of the square of the error (ISE):
- -
- The mean of the square of the error (MSE):
4.1.3. Assessment of Enhanced PSO Algorithm with Lozi Chaotic Map
- -
- The first De Jong function:
- -
- The second De Jong function:
- -
- The Rastrigin function:
- -
- The Schwefel function:
- -
- For the second De Jong function, PSO Lozi obtained the best results in almost all tests performed with this benchmark function. The performance of both PSO algorithms was better than that of DE.
- -
- In the case of Rastrigin’s benchmark function, there was no significant improvement in PSO performance; however, both PSO algorithms were significantly worse than DE for dim = 40.
- -
- The results for Schwefel’s function showed an increasing difference between the median values for PSO Weight and PSO Lozi, together with increasing dimension in favour of the PSO enhanced with the Lozi map. As in the previous case, both algorithms were surpassed by DE.
4.2. Differential Evolution (DE)
4.2.1. Overspeed Protection System of a Gas Turbine
4.2.2. Chemical Reactor Optimization
4.2.3. Evolutionary Chaos Control Optimization
4.2.4. Comparison of PSO with DE
- Case study 1: p-1 UPO, Lozi map as controlled system with (57)
- Case study 2: p-2 UPO with the same control
- Case study 3: higher order p-4 UPO with the same control
- Case Study 1: from the statistical point of view, the performance of both heuristics was similar. Nevertheless, DE converged towards the optimal solution in only twenty generations, and all fifty runs provided identical results. The convergence for PSO was much slower. Therefore, DE is more suitable for online control of nonlinear chaotic dynamics.
- Case Study 2: as in Case Study 1, the structure asnd simulation outputs showed similar features, with an even larger difference in favor of the DE algorithm.
- Case Study 3: dealing with the most complex and highly nonlinear dynamics, this case showed several interesting features. The classical geometrical (vector crossover)-based evolutionary algorithm was stacked in many suboptimal solutions, with only a small chance of leaving this area of the solution space. The PSO (swarm-based) algorithm was statistically better in the searching process, with a lower standard deviation and range of CF. Even when DE found a lower final CF value, PSO seemed to be a better and more robust choice for optimization in extremely nonlinear solution spaces due to its better natural exploration ability.
- Case Study 4: p-1 UPO, Lozi map as controlled system with (58)
- Case Study 5: p-2 UPO with the same control
- Case Study 6: higher order p-4 UPO with the same control
4.2.5. Optimal Tuning of Speed Control for a Brushless DC Motor
4.3. Self-Organizing Migrating Algorithm (SOMA)
4.3.1. SOMA Philosophy
4.3.2. Performance Comparison of PID Controller Using DE and SOMA Versus PSO
- Rise time: the time it takes for the process output to achieve the new desired value. One-third of the dominant process time constant is typical.
- Settling time: the time it takes for the process output to die to between, say, of the setpoint.
- Peak overshoot: the magnitude by which the controlled “variable swings” past the setpoint overshoot is normally acceptable for most loops.
4.4. Other Genetic and Evolutionary Algorithms
4.4.1. Ant Lion Approach
- 1: Define the objective function and population size (NP)
- 2: Generate the populations of ant lions and ants
- 3: Evaluate the fitness of the ant lions
- 4: Initialize the generation counter
- 5: For :
- 6: For each ant from 1 to :
- 7: Perform a random walk around a random ant lion,
- 8: Perform a random walk around the elite individual (best ant lion),
- 9: Update the position and check the search boundaries.
- 10: Evaluate the fitness of the ants
- 11: End for,
- 12: Update ant lion positions based on the ants
- 13: Update the elite individual and keep it in the population
- 14: Update the generation counter
- 15: End while,
- 16: Return the fittest (elite) ant lion.
4.4.2. Computational Intelligence Algorithm
4.4.3. Mixed Fruit Fly Optimization
4.4.4. Hybrid Chaos Immune Algorithm
4.5. Non-Evolutionary Chaotic Optimization Algorithms
4.5.1. Chaotic Optimization Algorithms
- COLM(1): the step size equals
- COLM(2): the step size equals
- COLM(3): the step size equals
- COLM(4): the step size linearly decreases from to
- COLM(5): the step size linearly increases from to
4.5.2. Improved Lozi Map-Based Chaotic Optimization Algorithm (ILCOA)
5. Applications in Control Theory
5.1. Observers
5.2. Control of Chaos
5.2.1. Stabilization of Chaos
5.2.2. Adaptive and Predictive Control
- Case 1: the value of a is unknown and the value of b is precisely known. In this case, the chosen control law iswithand , .With , the closed loop system emerges:
- Case 2: both values of a and b are known approximately. In this second case, the chosen control law iswhere the parameter estimator is provided byand , .With and , the closed loop systems emerges:
5.2.3. Identification of Chaotic Systems
6. Cryptography
6.1. Theoretical Algorithms
6.2. Algorithms for Images
6.2.1. Image Encryption Algorithms
- •
- Step 1: Calculate the hash value of the fingerprint using the SHA-256; a 256-bit hash value expressed as a hexadecimal number array can be obtained as follows: .
- •
- Step 2: Use elements of the array H to generate the initial values of the chaotic Lozi map in the following way:where ; , , and x, y denote the common and generated initial values of the chaotic Lozi map, respectively; and is used to convert hexadecimal number x to a decimal number.
- •
- Step 3: Suppose that the size of fingerprint-based random phase mask to be generated is pixels. First, construct the chaotic Lozi map with initial values x and y, then iterate times to obtain two random sequences and .
- •
- Step 4: Combine sequence X with sequence Y to form a new random sequence Z where .
- •
- Step 5: Reshape the random sequence Z to form a two-dimensional random matrix with size , where .
- •
- Step 6: The fingerprint-based random phase mask can be generated in the following way: .
6.2.2. Image Authentication Algorithm
- •
- Step 1: Generate the random initial condition under the defined range for the Lozi and logistic maps.
- •
- Step 2: Generate more samples based on the number of image pixels using the Lozi map and logistic map (say, and ).
- •
- Step 3: Remove the LSB value from all pixels and normalize the pixels (say, ).
- •
- Step 4: From the initial starting sample of the Lozi chaotic sequence, start adding samples with normalized pixels, i.e., .
- •
- Step 5: Keep the range of within by subtracting any values greater than 1 (say, ).
- •
- Step 6: From the initial starting sample of the logistic chaotic sequence, start adding samples with , .
- •
- Step 7: Keep the range of within by subtracting any values more than 1 (say, ).
- •
- Step 8: Take each value of as an input to the ANN, which has weights trained using the Lozi map and generate the corresponding output (say, ).
- •
- Step 9: Evaluate the mean value of (say, m) and apply thresholding with to generate the authentication code (say, ).
- •
- Step 10: With m add the authentication code to obtain the image with authentication code.
6.2.3. Hardware-Implemented Cryptographic Algorithms
7. Networks
7.1. Synchronization
7.1.1. Observer-Based Synchronization
- (1)
- The number of cells of the space of the output is exactly equal to that of the state of the chaotic drive system.
- (2)
- The observer is guaranteed to acquire the information about which cell in the state of chaotic system is from the synchronization signal ; in other words, the output is in cell if and only if is in cell .
7.1.2. Dead-Beat Synchronization
7.1.3. Impulsive Synchronization
7.1.4. Fuzzy Synchronization
- Rule 1: If is , then
- Rule 2: If is , then
7.1.5. Chaotic Synchronization
- (i)
- The swarm is divided in tribes, and each particle belongs to a single tribe
- (ii)
- Initially, the swarm is composed of only one particle
- (iii)
- Particles are added or removed according to tribes’ behaviors
- (iv)
- Displacement strategies are adapted according to the performance of the particles
7.1.6. Synchronization of Complex Fractional Lozi Maps
7.1.7. Synchronization of Globally Coupled Maps
- at every
- otherwise
7.2. Chimeras
- (i)
- Clustering: a dynamical cluster is defined as a subset of elements that are synchronized among themselves. In a clustered state, the elements in the system segregate into K distinct subsets that evolve in time, i.e., in the th cluster with .
- (ii)
- A chimeric state consists of the coexistence of one or more clusters and a subset of desynchronized elements.
- (iii)
- A desynchronized or incoherent state occurs when .
7.3. Solitary States
7.3.1. Existence of Solitary States
7.3.2. Solitary State Chimeras
7.3.3. Noise Induced and Controlled Chimera
7.4. Cellular Neural Networks
8. Miscellaneous
8.1. The Use of the Lozi Map as a Benchmark
8.2. Economy
8.3. Education
9. Conclusions
Funding
Conflicts of Interest
References
- Zeraoulia, E. Lozi Mappings—Theory and Applications; CRC Press: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2013; 309p. [Google Scholar]
- Lozi, R. Coexistence of Thread and Sheet Chaotic Attractors for Three-Dimensional Lozi Map. Dynamics 2023, 3, 315–344. [Google Scholar] [CrossRef]
- Ruelle, D. Dynamical systems with turbulent behavior. In Mathematical Problems in Theoretical Physics; Lecture Notes in Physics; Dell’Antonio, G., Doplicher, S., Jona-Lasinio, G., Eds.; Springer: Berlin/Heidelberg, Germany, 1978; Volume 80, pp. 341–360. [Google Scholar] [CrossRef]
- Letellier, C.; Abraham, R.; Shepelyansky, D.L.; Rössler, O.E.; Holmes, P.; Lozi, R.; Glass, L.; Pikovsky, A.; Olsen, L.F.; Tsuda, I.; et al. Some elements for a history of the dynamical systems theory. Chaos 2021, 31, 053110. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Hénon, M. A two-dimensional mapping with a strange attractor. Commun. Math. Phys. 1976, 50, 69–77. [Google Scholar] [CrossRef]
- Lozi, R. Analyse Numérique de Certains Problèmes de Bifurcation. Ph.D. Thesis, University of Nice, Nice, France, 1975. [Google Scholar]
- Smale, S. Differentiable dynamical systems. I Diffeormorphisms. Bull. Am. Math. Soc. 1967, 73, 747–817. [Google Scholar] [CrossRef]
- Lozi, R. Un attracteur étrange (?) du type attracteur de Hénon. J. Phys. 1978, 39, C5-9–C5-10. [Google Scholar] [CrossRef]
- Misiurewicz, M. Strange attractors for the Lozi mappings. Ann. N. Y. Acad. Sci. 1980, 357, 348–358. [Google Scholar] [CrossRef]
- Misiurewicz, M.; Stimac, S. Symbolic dynamics for Lozi maps. Nonlinearity 2016, 29, 3031–3046. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, Z. Strange attractors in the orientation-preserving Lozi Map. Chaos Solitons Fractals 1998, 9, 1857–1863. [Google Scholar] [CrossRef]
- Kucharski, P. Strange attractors for the family of orientation preserving Lozi Maps. arXiv 2022, arXiv:2211.10296. [Google Scholar]
- Baptista, D.; Severino, R.; Vinagre, S. The basin of attraction of Lozi Mappings. Int. J. Bifurc. Chaos 2009, 19, 1043–1049. [Google Scholar] [CrossRef]
- Ishii, Y. Towards a kneading theory for Lozi mappings I: A solution of the pruning front conjecture and the first tangency problem. Nonlinearity 1997, 10, 731–747. [Google Scholar] [CrossRef]
- Boroński, J.P.; Kucharski, P.; Ou, D.-S. Lozi Maps with Periodic Points of All Periods n > 13. 2022, Preprint. Available online: https://www.researchgate.net/publication/366740872_Lozi_maps_with_periodic_points_of_all_periods_n_13 (accessed on 27 April 2023).
- Botella-Soler, V.; Castelo, J.M.; Oteo, J.A.; Ros, J. Bifurcations in the Lozi map. J. Phys. A Math. Theor. 2011, 44, 305101. [Google Scholar] [CrossRef]
- Sushko, I.; Avrutin, V.; Gardini, L. Center Bifurcation in the Lozi Map. Int. J. Bifurc. Chaos 2021, 31, 2130046. [Google Scholar] [CrossRef]
- Glendinning, P.A.; Simpson, D.J.W. Chaos in the border-collision normal form: A computer-assisted proof using induced maps and invariant expanding cones. Appl. Math. Comput. 2022, 434, 127357. [Google Scholar] [CrossRef]
- Collet, P.; Levy, Y. Ergodic properties of the Lozi mappings. Commun. Math. Phys. 1984, 93, 461–482. [Google Scholar] [CrossRef]
- Rychlik, M. Invariant Measures and the Variational Principle for Lozi Mappings. In The Theory of Chaotic Attractors; Hunt, B.R., Li, T.Y., Kennedy, J.A., Nusse, H.E., Eds.; Springer: New York, NY, USA, 2004. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, Z. The Geometric Structure of Strange Attractors in the Lozi Map. Commun. Nonlinear Sci. Numer. Simul. 1998, 3, 119–123. [Google Scholar] [CrossRef]
- Afraimovich, V.S.; Chernov, N.I.; Sataev, E.A. Statistical properties of 2-D generalized hyperbolic attractors. Chaos 1995, 5, 238–252. [Google Scholar] [CrossRef] [PubMed]
- Zheng, W.-M. Symbolic Dynamics for the Lozi Map. Chaos Solitons Fractals 1991, 1, 243–248. [Google Scholar] [CrossRef]
- Ishii, Y. Towards a kneading theory for Lozi mappings II: Monotonicity of the Topological Entropy and Hausdorff Dimension of Attractors. Commun. Math. Phys. 1997, 190, 375–394. [Google Scholar] [CrossRef]
- Ishii, Y.; Sands, D. Monotonicity of the Lozi family near the tent-maps. Comm. Math. Phys. 1998, 198, 397–406. [Google Scholar] [CrossRef]
- de Carvalho, A.; Hall, T. How to prune a horseshoe. Nonlinearity 2002, 15, R19–R68. [Google Scholar] [CrossRef]
- Wormell, C.L. Conditional mixing in deterministic chaos. Ergod. Theory Dyn. Syst. 2023, 1–31. [Google Scholar] [CrossRef]
- Boroński, J.P.; Stimac, S. Densely branching trees as models for Hénon-like and Lozi-like attractors. Adv. Math. 2023, 429, 109191. [Google Scholar] [CrossRef]
- Anishchenko, V.S.; Boev, Y.I.; Semenova, N.I.; Strelkova, G.I. Local and global approaches to the problem of Poincaré recurrences. Applications in nonlinear dynamics. Phys. Rep. 2015, 587, 1–39. [Google Scholar] [CrossRef]
- Lopesino, C.; Balibrea, F.; Wiggins, S.R.; Mancho, A.M. The Chaotic Saddle in the Lozi Map, Autonomous and Nonautonomous Versions. Int. J. Bifurc. Chaos 2015, 25, 1550184. [Google Scholar] [CrossRef]
- Li, H.; Li, K.; Chen, M.; Bao, B. Coexisting Infinite Orbits in an Area-Preserving Lozi Map. Entropy 2020, 22, 1119. [Google Scholar] [CrossRef] [PubMed]
- Natiq, H.; Banerjee, S.; Ariffin, M.R.K.; Said, M.R.M. Can hyperchaotic maps with high complexity produce multistability? Chaos 2019, 29, 011103. [Google Scholar] [CrossRef]
- Zhusubaliyev, Z.T.; Mosekilde, E. Multistability and hidden attractors in a multilevel DC/DC converter. Math. Comput. Simul. 2015, 109, 32–45. [Google Scholar] [CrossRef]
- Bao, B.C.; Li, H.Z.; Zhu, L.; Zhang, X.; Chen, M. Initial-switched boosting bifurcations in 2D hyperchaotic map. Chaos 2020, 30, 033107. [Google Scholar] [CrossRef]
- Zhang, L.-P.; Liu, Y.; Wei, Z.-C.; Jiang, H.-B.; Bi, Q.-S. A novel class of two-dimensional chaotic maps with infinitely many coexisting attractors. Chin. Phys. B 2020, 29, 060501. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.Y.; Wang, N.; Zhu, L.; Chen, M.; Bao, B.C. Initials-boosted coexisting chaos in a 2D Sine map and its hardware implementation. IEEE Trans. Ind. Inform. 2021, 17, 1132–1140. [Google Scholar] [CrossRef]
- Li, B.; Gu, E.-G. The stratification and invariant region in the sea of an area-preserving map. Res. Sq. 2023. preprint. [Google Scholar] [CrossRef]
- Khennaoui, A.-A.; Ouannas, A.; Bendoukha, S.; Grassi, G.; Lozi, R.; Pham, V.-T. On fractional–order discrete-time systems: Chaos, stabilization and synchronization. Chaos Solitons Fractals 2019, 119, 150–162. [Google Scholar] [CrossRef]
- Ibrahim, R.W.; Baleanu, D. Global stability of local fractional Hénon-Lozi map using fixed point theory. AIMS Math. 2022, 7, 11399–11416. [Google Scholar] [CrossRef]
- Al-Saidi, N.M.G.; Natiq, H.; Baleanu, D.; Ibrahim, R.W. The dynamic and discrete systems of variable fractional order in the sense of the Lozi structure map. AIMS Math. 2023, 8, 733–751. [Google Scholar] [CrossRef]
- Joshi, D.D.; Gade, P.M.; Bhalekar, S. Study of low-dimensional nonlinear fractional difference equations of complex order. Chaos 2022, 32, 113101. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Vazquez, A.; Huertas, J.L.; Rueda, A.; Perez-Verdu, B.; Chua, L.O. Chaos from Switched-Capacitor Circuits: Discrete Maps. Proc. IEEE 1987, 75, 1090–1106. [Google Scholar] [CrossRef]
- Matsumoto, T. Chaos in Electronic Circuits. Proc. IEEE 1987, 75, 1033–1057. [Google Scholar] [CrossRef]
- Dmitriev, A.S.; Panas, A.I.; Starkov, S.O. Multiple access communication based on control of special chaotic trajectories. In Proceedings of the 2nd International Conference “Control of Oscillations and Chaos”, St. Petersburg, Russia, 5–7 July 2000; Volume 3. Available online: https://web.archive.org/web/20050220212257/http://www.cplire.ru:80/win/InformChaosLab/papers/coc00dps.pdf (accessed on 18 October 2023).
- Dmitriev, A.S.; Starkov, S.O. Fine structure of chaotic attractor for multiple-access communications. In Proceedings of the 7th IEEE International Specialist Workshop on Nonlinear Dynamics of Electronic Systems, Ronne, Denmark, 15–17 July 1999; pp. 161–164. Available online: http://www.cplire.ru/rus/InformChaosLab/papers/ndes99ds.html (accessed on 22 September 2023).
- Chua, L.O. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Abdelouahab, M.S.; Lozi, R.; Chua, L.O. Memfractance: A Mathematical Paradigm for Circuit Elements with Memory. Int. J. Bifurc. Chaos 2014, 24, 1430023. [Google Scholar] [CrossRef]
- Zhang, L.P.; Wei, Z.C.; Jiang, H.B.; Lyu, W.P.; Bi, Q.S. Extremely hidden multistability in a class of a two dimensional maps with a cosine memristor. Chin. Phys. B 2022, 31, 100503. [Google Scholar] [CrossRef]
- Wang, J.; Gu, Y.; Rong, K.; Xu, Q.; Zhang, X. Memristor-Based Lozi Map with Hidden Hyperchaos. Mathematics 2022, 10, 3426. [Google Scholar] [CrossRef]
- Khennaoui, A.-A.; Pham, V.-T.; Thoai, V.P.; Ouannas, A.; Grassi, G.; Momani, S. From Lozi map to fractional memristive Lozi map. Eur. Phys. J. Spec. Top. 2023. [Google Scholar] [CrossRef]
- Sahnoune, A.; Berkani, D. On the performance of chaotic interleaver for turbo codes. SN Appl. Sci. 2021, 3, 106. [Google Scholar] [CrossRef]
- Urrea, U.; Kern, J.; Lopez-Escobar, R. Design of chaotic interleaver based on Duffing map for turbo code. Symmetry 2022, 14, 2529. [Google Scholar] [CrossRef]
- Araujo, E.; Coelho, L.S. Particle swarm approaches using Lozi map chaotic sequences to fuzzy modelling of an experimental thermal-vacuum system. Appl. Soft Comput. 2008, 8, 1354–1364. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Fazzino, S.; Xibilia, M.G. Chaotic sequences to improve the performance of evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 289–304. [Google Scholar] [CrossRef]
- Onwubolu, G.C.; Babu, B.V. New Optimization Techniques in Engineering. In Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2004; Volume 141. [Google Scholar]
- Coelho, L.S. Reliability–redundancy optimization by means of a chaotic differential evolution approach. Chaos Solitons Fractals 2009, 41, 594–602. [Google Scholar] [CrossRef]
- Zelinka, I. SOMA–Self-Organizing Migrating Algorithm. In Studies in Fuzziness and Soft Computing; New Optimization Techniques in Engineering; Springer: Berlin/Heidelberg, Germany, 2004; Volume 141, pp. 167–217. [Google Scholar]
- Coelho, L.S.; Krohling, R.A. Predictive controller tuning using modified particle swarm optimisation based on Cauchy and Gaussian distributions. In Soft Computing: Methodologies and Applications; Springer Engineering Series in Advances in Soft Computing; Hoffmann, F., Köppen, M., Klawonn, F., Roy, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 32, pp. 287–298. [Google Scholar] [CrossRef]
- Marinke, R.; Araujo, J.E.; Coelho, L.S.; Matko, I. Particle swarm optimization (PSO) applied to fuzzy modeling in a thermal-vacuum system. In Proceedings of the 5th International Conference on Hybrid Intelligent Systems, Rio de Janeiro, Brazil, 6–9 December 2005; pp. 67–72. [Google Scholar]
- Pluhacek, M.; Senkerik, R.; Davendra, D.; Zelinka, I. Designing PID controller for DC motor system by means of enhaced PSO algorithm with discrete Lozi map. In Proceedings of the 26th European Conference on Modelling and Simulation, ECMS 2012, Koblenz, Germany, 29 May–1 June 2012; Troitzsch, K.G., Möhring, M., Lotzmann, U., Eds.; ECMS Digital Library: Caserta, Italy, 2012; pp. 405–409, ISBN 978-0-9564944-4-3. [Google Scholar] [CrossRef]
- Davendra, D.; Zelinka, I.; Senkerik, R. Chaos driven evolutionary algorithms for the task of PID control. Comput. Math. Appl. 2010, 60, 1088–1104. [Google Scholar] [CrossRef]
- Pluhacek, M.; Senkerik, R.; Davendra, D.; Zelinka, I. PID controller design for 4th order system by means of enhanced PSO algorithm with Lozi chaotic map. In Proceedings of the 18th International Conference on Soft Computing, MENDEL, Salamanca, Spain, 5–7 September 2012; pp. 35–39, ISBN 978-80-214-4540-6. [Google Scholar]
- Pluhacek, M.; Senkerik, R.; Zelinka, I. PSO algorithm enhanced with Lozi Chaotic Map-Tuning experiment. AIP Conf. Proc. 2015, 1648, 550022. [Google Scholar] [CrossRef]
- Liang, J.J.; Qu, B.-Y.; Suganthan, P.N.; Hernández-Díaz Alfredo, G. Problem Definitions and Evaluation Criteria for the CEC 2013 Special Session and Competition on Real-Parameter Optimization; Technical Report 201212; Computational Intelligence Laboratory, Zhengzhou University: Zhengzhou, China; Nanyang Technological University: Singapore, 2013. [Google Scholar]
- Pluhacek, M.; Budikova, V.; Senkerik, R.; Oplatkova, Z.; Zelinka, I. On The Performance of Enhanced PSO Algorithm with Lozi Chaotic Map—An initial Study. In Proceedings of the 18th International Conference on Soft Computing, MENDEL, Brno, Czech Republic, 27–29 June 2012; pp. 40–45, ISBN 978-80-214-4540-6. [Google Scholar]
- Pluhacek, M.; Senkerik, R.; Zelinka, I. An Overview on the Chaotic Lozi Map Enhanced PSO Algorithm with Inertia Weight. Informatika 2012, 2. Available online: http://trilobit.fai.utb.cz/an-overview-on-the-chaotic-lozi-map-enhanced-pso-algorithm-with-inertia-weight_6bb6ea8e-f3cb-47bc-8170-71fab42624f1 (accessed on 22 September 2023).
- Pluhacek, M.; Budikova, V.; Senkerik, R.; Oplatkova, Z.; Zelinka, I. Extended initial study on the perforance of enhaced PSO algorithm with Lozi chaotic map. In Advances in Intelligent Systems and Computing; Nostradamus: Modern Methods of Prediction, Modeling and Analysis of Nonlinear Systems; Springer: Berlin/Heidelberg, Germany, 2012; Volume 192, pp. 167–177. ISBN 978-3-642-33226-5. [Google Scholar]
- Pluhacek, M.; Senkerik, R.; Davendra, D.; Oplatkova, Z.; Zelinka, I. On the behavior and performance of chaos driven PSO algorithm with inertia weight. Comput. Math. Appl. 2013, 66, 122–134. [Google Scholar] [CrossRef]
- Chirikov, B.V. Research Concerning the Theory of Nonlinear Resonance and Stochasticity; Preprint N 267; Institute of Nuclear Physics: Novosibirsk, Russia, 1971. [Google Scholar]
- Arnold, V.I.; Avez, A. Problèmes Ergodiques de la Mécanique Classique; Gauthier-Villars: Paris, France, 1967. [Google Scholar]
- Pluhacek, M.; Senkerik, R.; Zelinka, I. Chaos PSO Algorithm Driven Alternately by two Different Chaotic Maps–an Initial Study. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation (CEC), Cancún, Mexico, 20–23 June 2013; pp. 2444–2449. [Google Scholar] [CrossRef]
- Senkerik, R.; Davendra, D.; Zelinka, I.; Pluhacek, M.; Kominkova Oplatkova, Z. Chaos Driven Differential Evolution with Lozi Map in the Task of Chemical Reactor Optimization. In Artificial Intelligence and Soft Computing; ICAISC 2013. Lecture Notes in Computer Science; Rutkowski, L., Korytkowski, M., Scherer, R., Tadeusiewicz, R., Zadeh, L.A., Zurada, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7895. [Google Scholar] [CrossRef]
- Senkerik, R.; Pluhacek, M.; Zelinka, I.; Davendra, D.; Oplatkova, Z.K.; Jasek, R. Evolutionary Control of Chaotic Lozi Map by Means of Chaos Driven Differential Evolution. In Recent Advances in Electrical Engineering and Related Sciences; AETA 2013: Lecture Notes in Electrical Engineering; Zelinka, I., Duy, V., Cha, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 282. [Google Scholar] [CrossRef]
- Senkerik, R.; Zelinka, I.; Pluhacek, M. Chaos Enhanced Differential Evolution in the Task of Evolutionary Control of Discrete Chaotic Lozi Map. Theor. Comput. Sci. 2016, 14, 836484. [Google Scholar] [CrossRef]
- Senkerik, R.; Zelinka, I.; Pluhacek, M.; Davendra, D.; Oplatkova, Z.K. Chaos Enhanced Differential Evolution in the Task of Evolutionary Control of Selected Set of Discrete Chaotic Systems. Sci. World J. 2014, 2014, 836484. [Google Scholar] [CrossRef]
- Pyragas, K. Control of chaos via extended delay feedback. Phys. Lett. Ser. A 1995, 206, 323–330. [Google Scholar] [CrossRef]
- Senkerik, R.; Pluhacek, M.; Zelinka, I.; Viktorin, A. Comparison of PSO and DE in the task of optimal control of Chaotic Lozi Map. In Proceedings of the 28th European Modeling and Simulation Symposium, Larnaca, Cyprus, 26–28 September 2016; Longo, F., Louca, L.S., Zhang, L., Eds.; pp. 303–308, ISBN 978-88-97999-68-3. Available online: http://www.msc-les.org/proceedings/emss/2016/EMSS2016.pdf (accessed on 15 September 2023).
- Rodríguez-Molina, A.; Villarreal-Cervantes, M.G.; Serrano-Pérez, O.; Solís-Romero, J.; Silva-Ortigoza, R. Optimal Tuning of the Speed Control for Brushless DC Motor Based on Chaotic Online Differential Evolution. Mathematics 2022, 10, 1977. [Google Scholar] [CrossRef]
- Zelinka, I.; Kojecky, L.; Lampart, M.; Nowakova, M.J.; Plucar, J. iSOMA swarm intelligence algorithm in synthesis of quantum computing circuits. Appl. Soft Comput. 2023, 142, 110350. [Google Scholar] [CrossRef]
- Pluhacek, M.; Zelinka, I.; Senkerik, R.; Davendra, D. Inspired in SOMA: Perturbation Vector Embedded into the Chaotic PSO Algorithm Driven by Lozi Chaotic Map. In Self-Organizing Migrating Algorithm; Studies in Computational Intelligence; Davendra, D., Zelinka, I., Eds.; Springer: Cham, Switzerland, 2016; Volume 626. [Google Scholar] [CrossRef]
- Davendra, D.; Zelinka, I. Controller parameters optimization on a representative set of systems using deterministic-chaotic-mutation evolutionary algorithms. In Evolutionary Algorithms and Chaotic Systems; Zelinka, I., Celikovský, S., Richter, H., Chen, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Astrom, K.J.; Hagglund, T. A more recent survey that covers the Ziegler-Nichols and Kappa-Tau tuning rules: “Automatic Tuning of PID Controllers”. In The Control Handbook; Levine, W.S., Ed.; IEEE/CRC Press: Boca Raton, FL, USA, 1995; Chapter 52; ISBN 9781420073669. [Google Scholar]
- Nikita, S.; Chidambaram, M. Improved Continuous Cycling Method of Tuning PID Controllers for Unstable Systems. Indian Chem. Eng. 2018, 60, 213–231. [Google Scholar] [CrossRef]
- Vikhar, P.A. Evolutionary algorithms: A critical review and its future prospects. In Proceedings of the 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; pp. 261–265. [Google Scholar]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Coelho, L.d.S.; Maidl, G.; Pierezan, J.; Mariani, V.C.; da Luz, M.V.F.; Leite, J.V. Ant Lion Approach Based on Lozi Map for Multiobjective Transformer Design Optimization. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 280–285. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Martínez-Vargas, A.; Gomez-Aviles, J.A.; Cosio-Leon, M.A.; Andrade, A.G. Explaining the walking through of a team of algorithms. Computer 2023, 56, 67–81. [Google Scholar] [CrossRef]
- Pan, W.T. A new fruit fly optimization algorithm: Taking the financial distress model. Knowl. Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Mitic, M.; Vukovic, N.; Petrovic, M.; Miljkovic, Z. Chaotic fruit fly optimization algorithm. Knowl. Based Syst. 2015, 89, 446–458. [Google Scholar] [CrossRef]
- Luo, H.; Zhang, G.; Shen, Y.; Hu, J. Mixed Fruit Fly Optimization Algorithm Based on Lozi’s Chaotic Mapping. In Proceedings of the 2014 Ninth International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, Guangzhou, China, 8–10 November 2014; pp. 179–183. [Google Scholar] [CrossRef]
- Liu, D.; Liu, X.; Zhang, L.; Wei, C.; Wang, D. Optimization design of hybrid chaos immune algorithm with self-adaptive parameter adjusting. In Proceedings of the 2012 8th International Conference on Natural Computation, Chongqing, China, 29–31 May 2012; pp. 869–873. [Google Scholar] [CrossRef]
- Coelho, L.S. Tuning of PID controller for an automatic regulator voltage system using chaotic optimization approach. Chaos Solitons Fractals 2009, 39, 1504–1514. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H.A.; Jalilzadeh, S.; Safari, A. Multi-machine power system stabilizers design using chaotic optimization algorithm. Energy Convers. Manag. 2010, 51, 1572–1580. [Google Scholar] [CrossRef]
- Shayeghi, H.; Jalilzadeh, S.; Shayanfar, H.A.; Safari, A. Robust PSS Design Using Chaotic Optimization Algorithm for a Multimachine Power System. In Proceedings of the 2009 6th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Chonburi, Thailand, 6–9 May 2009; pp. 40–43. [Google Scholar] [CrossRef]
- Safari, A.; Shayeghi, H.; Shayanfar, H.A. A chaotic optimization algorithm to output feedback damping controller design for a statcom. Int. J. Tech. Phys. Probl. Eng. 2010, 2, 44–50. Available online: https://www.iotpe.com/IJTPE/IJTPE-2010/IJTPE-Issue4-Vol2-No3-Sep2010/7-IJTPE-Issue4-Vol2-No3-Sep2010-pp44-50.pdf (accessed on 25 August 2023).
- Jalilvand, A.; Safari, A.; Bagheri, A. Design of an immune-genetic algorithm-based optimal state feedback controller as UPFC. In Proceedings of the 6th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Chonburi, Thailand, 6–9 May 2009; pp. 36–39. [Google Scholar] [CrossRef]
- Hamaizia, T.; Lozi, R. An improved chaotic optimization algorithm using a new global locally averaged strategy. J. Nonlinear Syst. Appl. 2012, 3, 58–63. [Google Scholar]
- Bououden, R.; Abdelouahab, M.-S. Chaotic Optimization Algorithm Based on the Modified Probability Density Function of Lozi Map. Bol. Soc. Paran. Mat. 2021, 39, 9–22. [Google Scholar] [CrossRef]
- Bououden, R.; Abdelouahab, M.-S. On Efficient Chaotic Optimization Algorithm Based on Partition of Data Set in Global Research Step. Nonlinear Dyn. Syst. Theory 2018, 18, 42–52. Available online: http://www.e-ndst.kiev.ua/v18n1/5(62).pdf (accessed on 25 August 2023).
- Alizadeh, M.; Alizadeh, M.; Ganjefar, S. Simultaneous coordinated design of PSS and SSSC using improved Lozi map based chaotic optimization algorithm (ILCOA). Neurocomputing 2013, 122, 181–192. [Google Scholar] [CrossRef]
- Pourmousa, N.; Ebrahimi, S.M.; Malekzadeh, M.; Alizadeh, M. Parameter estimation of photovoltaic cells using improved Lozi map based chaotic optimization Algorithm. Sol. Energy 2019, 180, 180–191. [Google Scholar] [CrossRef]
- Askarzadeh, A.; Rezazadeh, A. Extraction of maximum power point in solar cells using bird mating optimizer-based parameters identification approach. Sol. Energy 2013, 90, 123–133. [Google Scholar] [CrossRef]
- Oliva, D.; El Aziz, M.A.; Hassanien, A.E. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Sol. Energy 2017, 200, 141–154. [Google Scholar] [CrossRef]
- Ebrahimi, S.M.; Malekzadeh, M.; Alizadeh, M.; HosseinNia, S.H. Parameter identification of nonlinear system using an improved Lozi map based chaotic optimization algorithm (ILCOA). Evol. Syst. 2021, 12, 255–272. [Google Scholar] [CrossRef]
- Ott, E.; Grebogi, C.; Yorke, J.A. Controlling chaos. Phys. Rev. Lett. 1990, 64, 1196, Erratum in Phys. Rev. Lett. 1990, 64, 2837. [Google Scholar] [CrossRef]
- Xiao, M.Q. A direct method for the construction of nonlinear discrete-time observer with linearizable error dynamics. IEEE Trans. Autom. Control 2006, 51, 128–135. [Google Scholar] [CrossRef]
- Voortman, Q.; Pogromsky, A.Y.; Matveev, A.S.; Nijmeijer, H. Data-Rate Constrained Observers of Nonlinear Systems. Entropy 2019, 21, 282. [Google Scholar] [CrossRef]
- Saha, L.M.; Kumra, N. Complexities in Lozi map and control of chaos. Adv. Stud. Contemp. Math. 2016, 26, 343–353. Available online: https://www.kci.go.kr/kciportal/ci/sereArticleSearch/ciSereArtiView.kci?sereArticleSearchBean.artiId=ART002103170 (accessed on 25 August 2023).
- Saha, L.M.; Erjaee, G.H.; Budhraja, M. Controlling chaos in 2-dimensional systems. Iran. J. Sci. Technol. Trans. A 2004, 28, 221–226. [Google Scholar] [CrossRef]
- Gokce, K.; Uyaroglu, Y. Adaptive neural network based stabilization and trajectory tracking control of discrete-time chaotic systems. Optoelectron. Adv. Mater. Rapid Commun. 2015, 9, 1022–1027. [Google Scholar]
- Chen, G.; Dong, X. On feedback control of chaotic nonlinear dynamic systems. Int. J. Bifurc. Chaos 1992, 2, 407–411. [Google Scholar] [CrossRef]
- Gonzalez, G.A. Controlling chaos of an uncertain Lozi system via adaptive techniques. Int. J. Bifurc. Chaos 1995, 5, 559–562. [Google Scholar] [CrossRef]
- Park, K.-S.; Park, J.-B.; Choi, Y.-H.; Yoon, T.-S.; Chen, G. Generalized predictive control of discrete-time chaotic systems. Int. J. Bifurc. Chaos 1998, 8, 1591–1597. [Google Scholar] [CrossRef]
- Feng, G.; Chen, G. Adaptive control of discrete-time chaotic systems: A fuzzy control approach. Chaos Solitons Fractals 2005, 23, 459–467. [Google Scholar] [CrossRef]
- Chen, G.; Chen, Y.; Ogmen, H. Identifying chaotic systems via a Wiener-type cascade models. IEEE Control Syst. 1997, 17, 29–36. [Google Scholar] [CrossRef]
- Xu, M.; Chen, G.; Tian, Y.-G. Identifying chaotic systems using Wiener and Hammerstein cascade models. Math. Comput. Model. 2001, 33, 483–493. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Ibanez, C.A.; Suarez-Castagnon, M. Exact state reconstructors in the recovery of messages encrypted by the sates of nonlinear discrete-time chaotic systems. Int. J. Bifurc. Chaos 2004, 12, 169–177. [Google Scholar] [CrossRef]
- Aliwi, B.H.; Ajeena, R.K.K. A performed knapsack problem on the fuzzy chaos cryptosystem with cosine Lozi chaotic map. AIP Conf. Proc. 2023, 2414, 040047. [Google Scholar] [CrossRef]
- Alawida, M.; Samsudin, A.; Teh, J.S.; Alshoura, W.H. Digital Cosine Chaotic Map for Cryptographic Applications. IEEE Access 2019, 7, 150609–150622. [Google Scholar] [CrossRef]
- Su, Y.; Xu, W.; Li, T.; Zhao, J.; Liu, S. Optical color image encryption based on fingerprint key and phase-shifting digital holography. Optics Lasers Eng. 2021, 140, 106550. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, Q.; Zhang, H.; Li, T.; Xu, W.; Liu, S.; Su, Y. Optical single-channel color image encryption based on chaotic fingerprint phase mask and diffractive imaging. Appl. Opt. 2023, 62, 1009–1018. [Google Scholar] [CrossRef] [PubMed]
- Suresh, D.K.; MadhaviLatha, M.; Singh, M.K. Image authentication with tampering localization using chaotic and neural mapping. Int. J. Neural Netw. Adv. Appl. 2014, 1, 20–29. Available online: https://www.naun.org/cms.action?id=7634 (accessed on 23 August 2023).
- Cicek, S. Microcontroller-based random number generator implementation by using discrete chaotic maps. Sak. Univ. J. Sci. 2020, 24, 832–844. [Google Scholar] [CrossRef]
- Merah, L.; Ali-Pacha, A.; Hadj-Said, N.; Mecheri, B.; Dellassi, M. FPGA hardware co-simulation of new chaos-based stream cipher based on Lozi Map. Int. J. Eng. Technol. 2017, 9, 420–425. [Google Scholar] [CrossRef]
- Xiao, Y.; Wang, Z.; Cao, J.; Deng, R.; Liu, Y.; He, J.; Chen, L. Time–frequency domain encryption with SLM scheme for physical-layer security in an OFDM-PON system. J. Opt. Commun. Netw. 2018, 10, 46–51. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef]
- Zhang, H.; Li, C.; Liao, X. Observer-based synchronization for piecewise-linear discrete chaotic systems based on piecewise quadratic Lyapunov functions. Int. J. Bifurc. Chaos 2005, 19, 4389–4397. [Google Scholar] [CrossRef]
- Angeli, A.; De Genesio, R.; Tesi, A. Deadbeat chaos synchronization in discrete-time systems. IEEE Trans. Circuits Syst. 1995, 42, 54–56. [Google Scholar] [CrossRef]
- Grassi, G. Propagation of projectives ynchronization in a series connection of chaotic systems. J. Frankl. Inst. 2010, 347, 438–451. [Google Scholar] [CrossRef]
- Devaney, R.L. A piecewise linear model for the zones of instability of an area-preserving map. Physica D 1984, 10, 387–393. [Google Scholar] [CrossRef]
- Lian, K.-Y.; Liu, P.; Chiu, C.-S.; Chiang, T.-S. Robust Dead-beat synchronization and communication for discrete-time chaotic systems. Int. J. Bifurc. Chaos 2002, 12, 835–846. [Google Scholar] [CrossRef]
- Zheng, Y.-A.; Nian, Y.-B.; Liu, Z.-R. Impulsive synchronization of Discrete chaotic systems. Chin. Phys. Lett. 2003, 20, 199–201. [Google Scholar] [CrossRef]
- Zhang, L.; Jiang, H. Impulsive generalized synchronization for a class of nonlinear discrete chaotic systems. Commun. Nonlinear Sci. Numer. Simulat. 2011, 16, 2027–2032. [Google Scholar] [CrossRef]
- Vasegh, N.; Majd, V.J. Adaptive fuzzy synchronization of discrete-time chaotic systems. Chaos Solitons Fractals 2006, 28, 1029–1036. [Google Scholar] [CrossRef]
- Dmitriev, A.S.; Kassian, G.A.; Khilinsky, A.D.; Hasler, M. Chaotic Synchronization Via Minimum Information Transmission. arXiv 2002, arXiv:nlin/0205029. [Google Scholar] [CrossRef]
- Coelho, L.S.; de Andrade Bernert, D.L. PID control design for chaotic synchronization using a tribes optimization approach. Chaos Solitons Fractals 2009, 42, 634–640. [Google Scholar] [CrossRef]
- Clerc, M. Particle Swarm Optimization; ISTE: London, UK, 2006. [Google Scholar]
- Roy, B.; Acharyya, A.B. Synchronization of globally coupled Lozi map using periodically varying parameter. Acta Phys. Pol. B 2019, 50, 1671–1679. [Google Scholar] [CrossRef]
- Cano, A.V.; Cosenza, M.G. Chimeras and clusters in networks of hyperbolic chaotic oscillators. Phys. Rev. E 2017, 95, 030202(R). [Google Scholar] [CrossRef]
- Parastesh, F.; Jafari, S.; Azarnoush, H.; Shahriari, Z.; Wang, Z.; Boccaletti, S.; Perc, M. Chimeras. Phys. Rep. 2021, 898, 1–114. [Google Scholar] [CrossRef]
- Semenova, N.; Zakharova, A.; Schöll, E.; Anishchenko, V. Impact of hyperbolicity on chimera states in ensembles of nonlocally coupled chaotic oscillators. AIP Conf. Proc. 2016, 1738, 210014. [Google Scholar] [CrossRef]
- Semenova, N.; Zakharova, A.; Schöll, E.; Anishchenko, V. Does hyperbolicity impede emergence of chimera states in networks of nonlocally coupled chaotic oscillators? Europhys. Lett. 2015, 112, 40002. [Google Scholar] [CrossRef]
- Anishchenko, V.; Rybalova, E.; Semenova, N. Chimera States in two coupled ensembles of Henon and Lozi maps. Controlling chimera states. AIP Conf. Proc. 2018, 1978, 470013. [Google Scholar] [CrossRef]
- Semenova, N.; Vadivasova, T.; Anishchenko, V. Mechanism of solitary state appearance in an ensemble of nonlocally coupled Lozi maps. Eur. Phys. J. Spec. Top. 2018, 227, 1173–1183. [Google Scholar] [CrossRef]
- Rybalova, E.; Strelkova, G. Response of solitary states to noise-modulated parameters in nonlocally coupled networks of Lozi maps. Chaos 2022, 32, 021101. [Google Scholar] [CrossRef] [PubMed]
- Rybalova, E.; Semenova, N.; Anishchenko, V. Solitary State Chimera: Appearance, Structure, and Synchronization. In Proceedings of the 2018 International Symposium on Nonlinear Theory and Its Applications NOLTA2018, Tarragona, Spain, 2–6 September 2018; pp. 601–604. [Google Scholar]
- Bukh, A.; Rybalova, E.; Semenova, N.; Strelkova, G.; Anishchenko, V. New type of chimera and mutual synchronization of spatiotemporal structures in two coupled ensembles of nonlocally interacting chaotic maps. Chaos 2017, 27, 111102. [Google Scholar] [CrossRef]
- Rybalova, E.; Strelkova, G.; Schöll, E.; Anishchenko, V. Relay and complete synchronization in heterogeneous multiplex networks of chaotic maps. Chaos 2020, 30, 061104. [Google Scholar] [CrossRef]
- Rybalova, E.; Strelkova, G.; Anishchenko, V. Mechanism of realizing a solitary state chimera in a ring of nonlocally coupled chaotic maps. Chaos Solitons Fractals 2018, 115, 300–305. [Google Scholar] [CrossRef]
- Rybalova, E.; Schöll, E.; Strelkova, G. Controlling chimera and solitary states by additive noise in networks of chaotic maps. J. Differ. Appl. 2022, 1–22. [Google Scholar] [CrossRef]
- Chua, L.O.; Yang, L. Cellular neural networks: Theory. IEEE Trans. Circuits Syst. 1998, 35, 1257–1272. [Google Scholar] [CrossRef]
- Chua, L.O.; Yang, L. Cellular neural networks: Applications. IEEE Trans. Circuits Syst. 1998, 35, 1273–1290. [Google Scholar] [CrossRef]
- Chang, H.-M.; Juang, J. Piecewise two-dimensional maps and applications to cellular neural networks. Int. J. Bifurc. Chaos 2004, 14, 2223–2228. [Google Scholar] [CrossRef]
- Chang, H.-M.; Juang, J. Boundary Influence on the Entropy of a Problem in Cellular Neural Networks. Master’s Thesis, National Chiao Tung University, Taiwan, China, 2004. Available online: https://ir.nctu.edu.tw/bitstream/11536/52224/3/250303.pdf (accessed on 22 September 2023). (In English).
- Skrynnyk, I.; Dmitrishin, D.; Stokolos, A.; Iacob, I.E. Computational aspects of large-length cycle search algorithms for nonlinear discrete systems. Proc. Odessa Polytech. Univ. 2019, 58, 69–84. Available online: http://dspace.opu.ua/jspui/handle/123456789/10522 (accessed on 28 July 2023). [CrossRef]
- Shang, D.; Shang, P.; Liu, L. Multidimensional scaling method for complex time series feature classification based on generalized complexity-invariant distance. Nonlinear Dyn. 2019, 95, 2875–2892. [Google Scholar] [CrossRef]
- Jacob, R.; Harikrishnan1, K.P.; Misra, R.; Ambika, G. Measure for degree heterogeneity in complex networks and its application to recurrence network analysis. R. Soc. Open Sci. 2017, 4, 160757. [Google Scholar] [CrossRef]
- Amigo, J.M.; Kennel, M.B. Topological permutation entropy. Physica D 2007, 231, 137–142. [Google Scholar] [CrossRef]
- Mekler, A. Calculation of EEG correlation dimension: Large massifs of experimental data. Comput. Methods Programs Biomed. 2008, 92, 154–160. [Google Scholar] [CrossRef]
- Yang, Y.; Duan, Z. An effective co-evolutionary algorithm based on artificial bee colony and differential evolution for time series predicting optimization. Complex Intell. Syst. 2020, 6, 299–308. [Google Scholar] [CrossRef]
- Tang, T.W.; Allison, A.; Abbott, D. Investigation of chaotic switching strategies in Parrondo’s games. Fluct. Noise Lett. 2004, 4, L585–L596. [Google Scholar] [CrossRef]
- Harmer, G.P.; Abbott, D.; Taylor, P.G.; Parrondo, J.M.R. Brownian ratchets and Parrondo’s games. Chaos 2001, 11, 705–714. [Google Scholar] [CrossRef] [PubMed]
- Al-Hilli, W.H. Using Software’s and Technology in Solving Mathematics Problem to Motivate and Accelerate the Learning Process. EURASIA J. Math. Sci. Technol. Educ. 2019, 15, em1670. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, V.H.P.; Oliveira, T.R.; Cunha, J.P.V.S. Globally Stable Synchronization of Chaotic Systems Based on Norm Observers Connected in Cascade. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 883–887. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result for dim = 40 | PSO Weight | PSO Lozi | DE |
|---|---|---|---|
| The worst result | 1.03 | ||
| The best result | 2.25 | ||
| Median | 2.19 |
| Pop. number | 30 | 50 | 75 | 100 | 150 | 200 | 300 | 400 |
|---|---|---|---|---|---|---|---|---|
| PSO Weight | −3697.6 | −3873.6 | −4141.0 | −4255.8 | −4329.6 | −4866.4 | −5316.4 | −5377.7 |
| PSO Lozi | −4340.1 | −4560.4 | −5032.8 | −5241.8 | −5802.0 | −5998.1 | −6174.6 | −6225.6 |
| DE | −6100.9 | −5737.7 | −5649.1 | −5500.0 | −5635.6 | −5651.5 | −5673.3 | −5651.23 |
| DE Version | Avg. CF | Median CF | Std. Dev. | Max CF | Min CF |
|---|---|---|---|---|---|
| Canonical DE | 21,259.0 | 21,234.1 | 94.1 | 21,588.2 | 21,089.2 |
| Chaos DE Lozi | 21,107.6 | 21,107.4 | 25.4 | 21,160.7 | 21,059.0 |
| Generation No.: | 50 | 100 | 150 | 200 |
|---|---|---|---|---|
| Avg. CF for Canonical DE | 25,320.1 | 22,719.9 | 21,619.8 | 21,259.0 |
| Avg. CF for Chaos DE Lozi | 24,707.1 | 21,992.1 | 21,265.2 | 21,107.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozi, R. Survey of Recent Applications of the Chaotic Lozi Map. Algorithms 2023, 16, 491. https://doi.org/10.3390/a16100491
Lozi R. Survey of Recent Applications of the Chaotic Lozi Map. Algorithms. 2023; 16(10):491. https://doi.org/10.3390/a16100491
Chicago/Turabian StyleLozi, René. 2023. "Survey of Recent Applications of the Chaotic Lozi Map" Algorithms 16, no. 10: 491. https://doi.org/10.3390/a16100491
APA StyleLozi, R. (2023). Survey of Recent Applications of the Chaotic Lozi Map. Algorithms, 16(10), 491. https://doi.org/10.3390/a16100491