Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China

 ,
, 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Ground Plot Data
2.2.1. Stand Measurements
2.2.2. Canopy Structural Class Definitions
2.3. UAV-LiDAR Data Acquisition and Pre-Processing
2.4. UAV-LiDAR-Derived Metrics
2.5. Regression Models
2.5.1. Linear Models
2.5.2. Tree-Based Models
2.5.3. Kernel-Based Models
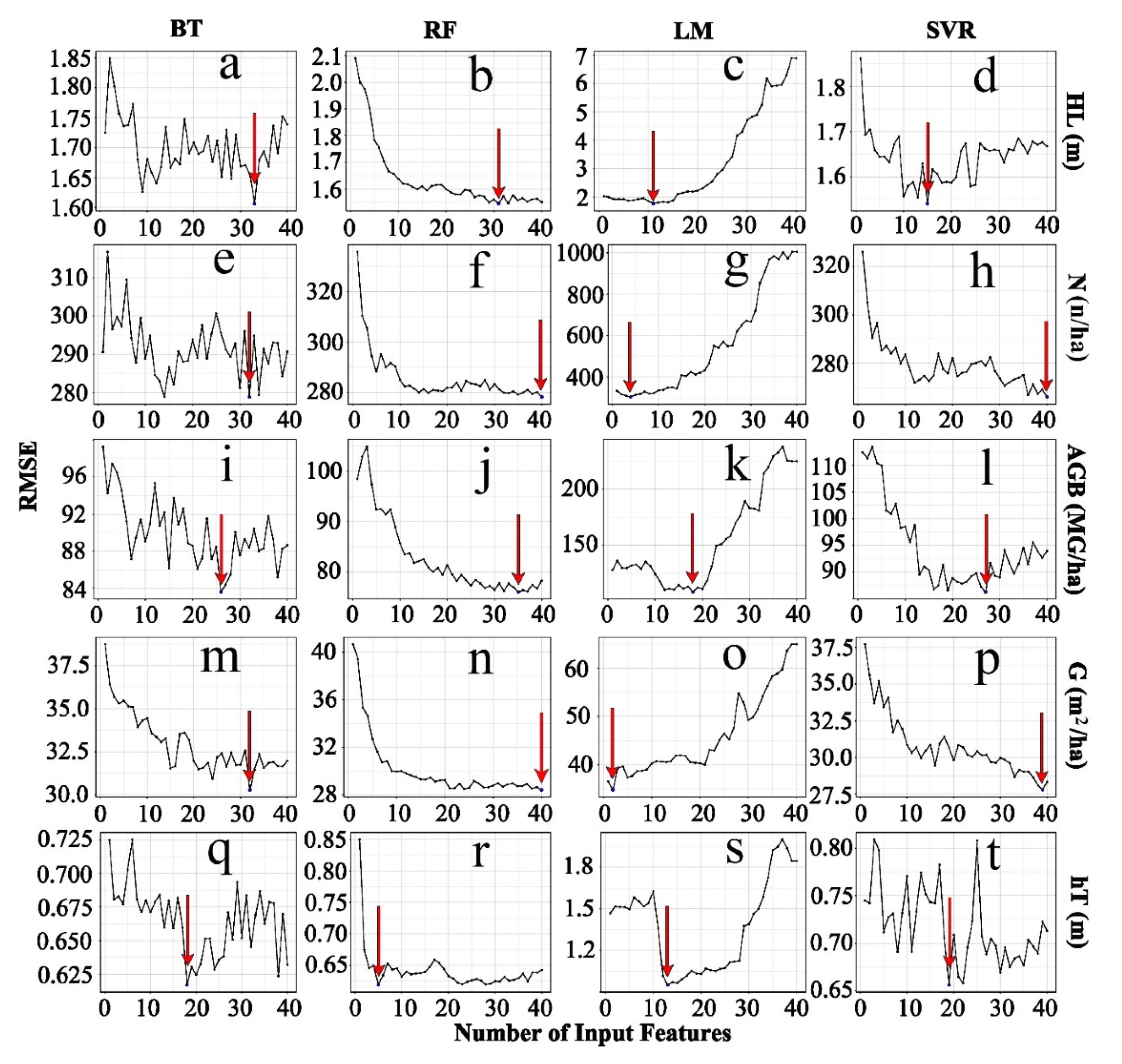
2.6. Feature Selection
2.7. Model Validation
3. Results
3.1. Selection of LiDAR to Estimate the Canopy Structural Parameters
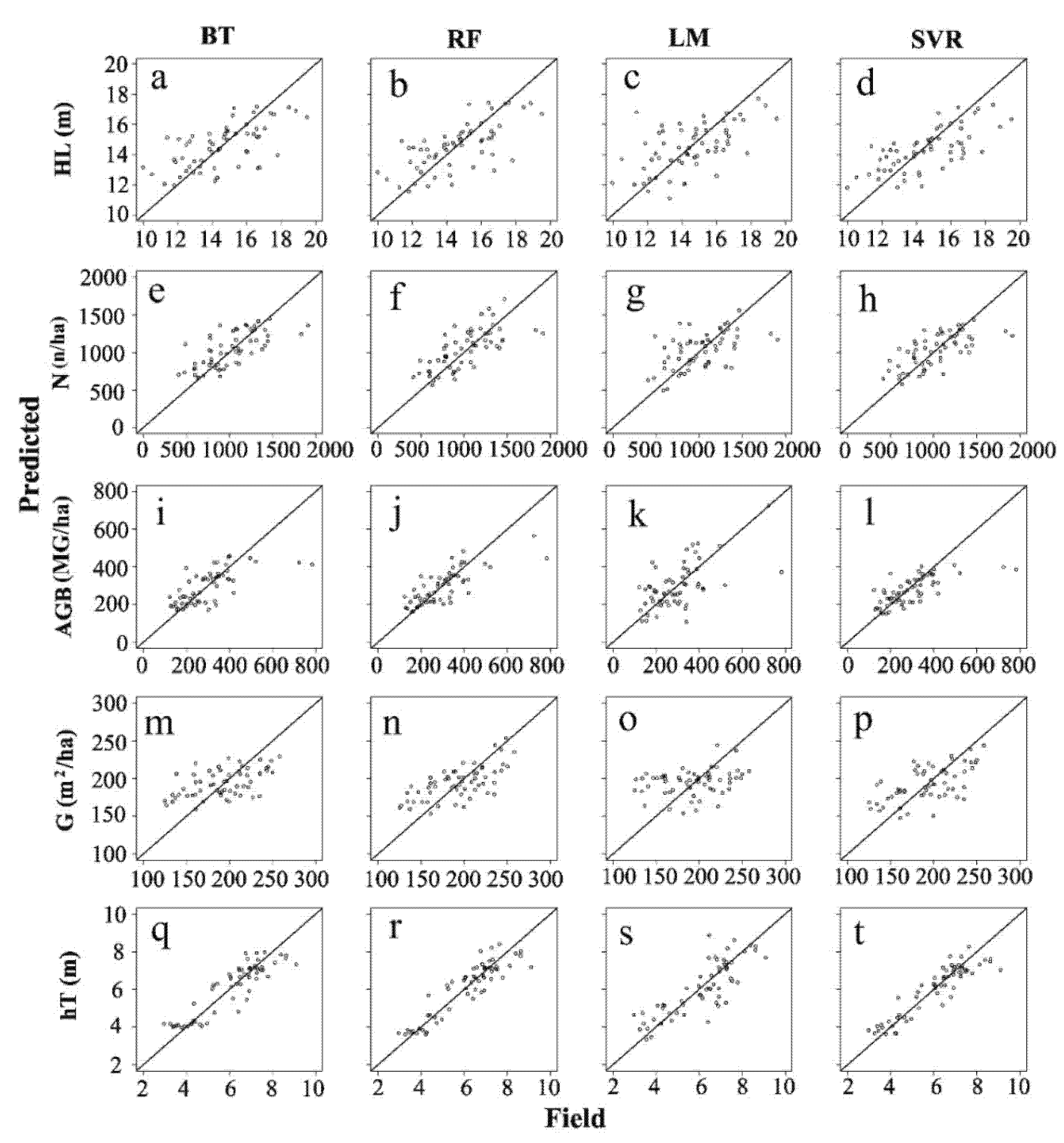
3.2. Accuracy Assessment of the Canopy Structural Parameters
4. Discussion
4.1. Important Values of the LiDAR Indexes for Estimating Forest Canopy Structure Parameters
4.2. Comparison of the Model Accuracy of Different Forest Canopy Structure Parameters
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huston, M.A.; Marland, G. Carbon management and biodiversity. J. Environ. Manag. 2003, 67, 77–86. [Google Scholar] [CrossRef]
- Saatchi, S.; Marlier, M.; Chazdon, R.L.; Clark, D.B.; Russell, A.E. Impact of spatial variability of tropical forest structure on radar estimation of aboveground biomass. Remote Sens. Environ. 2011, 115, 2836–2849. [Google Scholar] [CrossRef]
- Houghton, R.A. Aboveground Forest Biomass and the Global Carbon Balance. Glob. Chang. Biol. 2005, 11, 945–958. [Google Scholar] [CrossRef]
- Phua, M.-H.; Johari, S.A.; Wong, O.C.; Ioki, K.; Mahali, M.; Nilus, R.; Coomes, D.A.; Maycock, C.R.; Hashim, M. Synergistic use of Landsat 8 OLI image and airborne LiDAR data for above-ground biomass estimation in tropical lowland rainforests. For. Ecol. Manag. 2017, 406, 163–171. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2017, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Puletti, N.; Puliti, S.; Travaglini, D.; Chirici, G. Assessment of UAV photogrammetric DTM-independent variables for modelling and mapping forest structural indices in mixed temperate forests. Ecol. Indic. 2020, 117, 106513. [Google Scholar] [CrossRef]
- Rissanen, K.A.; Martin-Guay, M.-O.; Riopel-Bouvier, A.-S.; Paquette, A. Light interception in experimental forests affected by tree diversity and structural complexity of dominant canopy. Agric. For. Meteorol. 2019, 278, 107655. [Google Scholar] [CrossRef]
- Draper, F.C.; Asner, G.P.; Coronado, E.H.; Baker, T.R.; García-Villacorta, R.; Pitman, N.C.A.; Fine, P.V.A.; Phillips, O.L.; Gómez, R.Z.; Guerra, C.A.A.; et al. Dominant tree species drive beta diversity patterns in western Amazonia. Ecology 2019, 100, e02636. [Google Scholar] [CrossRef] [Green Version]
- Ferraz, A.; Saatchi, S.S.; Mallet, C.; Jacquemoud, S.; Gonçalves, G.; Silva, C.A.; Soares, P.; Tomé, M.; Pereira, L.G. Airborne Lidar Estimation of Aboveground Forest Biomass in the Absence of Field Inventory. Remote Sens. 2016, 8, 653. [Google Scholar] [CrossRef] [Green Version]
- Frazer, G.; Magnussen, S.; Wulder, M.A.; Niemann, K.O. Simulated impact of sample plot size and co-registration error on the accuracy and uncertainty of LiDAR-derived estimates of forest stand biomass. Remote Sens. Environ. 2011, 115, 636–649. [Google Scholar] [CrossRef]
- Urbazaev, M.; Thiel, C.; Cremer, F.; Dubayah, R.; Migliavacca, M.; Reichstein, M.; Schmullius, C. Estimation of forest aboveground biomass and uncertainties by integration of field measurements, airborne LiDAR, and SAR and optical satellite data in Mexico. Carbon Balance Manag. 2018, 13, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nilsson, M.; Wardle, D.A. Understory vegetation as a forest ecosystem driver: Evidence from the northern Swedish boreal forest. Front. Ecol. 2005, 3, 421–428. [Google Scholar] [CrossRef]
- Atkins, J.W.; Fahey, R.T.; Hardiman, B.H.; Gough, C.M. Forest Canopy Structural Complexity and Light Absorption Relationships at the Subcontinental Scale. J. Geophys. Res. Biogeosci. 2018, 123, 1387–1405. [Google Scholar] [CrossRef]
- Rosier, C.L.; Van Stan, J.; Moore, L.D.; Schrom, J.O.S.; Wu, T.; Reichard, J.S.; Kan, J. Forest canopy structural controls over throughfall affect soil microbial community structure in an epiphyte-laden maritime oak stand. Ecohydrology 2015, 8, 1459–1470. [Google Scholar] [CrossRef]
- Wallace, K.J.; Laughlin, D.; Clarkson, B.D.; Schipper, L.A. Forest canopy restoration has indirect effects on litter decomposition and no effect on denitrification. Ecosphere 2018, 9, 02534. [Google Scholar] [CrossRef]
- Gilliam, F.S. Response of herbaceous layer species to canopy and soil variables in a central Appalachian hardwood forest ecosystem. Plant Ecol. 2019, 220, 1131–1138. [Google Scholar] [CrossRef]
- Goodman, R.C.; Phillips, O.L.; Baker, T.R. The importance of crown dimensions to improve tropical tree biomass estimates. Ecol. Appl. 2014, 24, 680–698. [Google Scholar] [CrossRef] [Green Version]
- Miura, N.; Jones, S. Characterizing forest ecological structure using pulse types and heights of airborne laser scanning. Remote Sens. Environ. 2010, 114, 1069–1076. [Google Scholar] [CrossRef]
- Pasher, J.; King, D.J. Multivariate forest structure modelling and mapping using high resolution airborne imagery and topographic information. Remote Sens. Environ. 2010, 114, 1718–1732. [Google Scholar] [CrossRef]
- Hermosilla, T.; Ruiz, L.A.; Kazakova, A.N.; Coops, N.C.; Moskal, L.M. Estimation of forest structure and canopy fuel parameters from small-footprint full-waveform LiDAR data. Int. J. Wildland Fire 2014, 23, 224–233. [Google Scholar] [CrossRef] [Green Version]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Vega, C.; St-Onge, B. Mapping site index and age by linking a time series of canopy height models with growth curves. For. Ecol. Manag. 2009, 257, 951–959. [Google Scholar] [CrossRef]
- Goodbody, T.R.; Tompalski, P.; Coops, N.C.; Hopkinson, C.; Treitz, P.M.; Van Ewijk, K. Forest Inventory and Diversity Attribute Modelling Using Structural and Intensity Metrics from Multi-Spectral Airborne Laser Scanning Data. Remote Sens. 2020, 12, 2109. [Google Scholar] [CrossRef]
- Noordermeer, L.; Bollandsås, O.M.; Ørka, H.O.; Næsset, E.; Gobakken, T. Comparing the accuracies of forest attributes predicted from airborne laser scanning and digital aerial photogrammetry in operational forest inventories. Remote Sens. Environ. 2019, 226, 26–37. [Google Scholar] [CrossRef]
- Jayathunga, S.; Owari, T.; Tsuyuki, S.; Hirata, Y. Potential of UAV photogrammetry for characterization of forest canopy structure in uneven-aged mixed conifer–broadleaf forests. Int. J. Remote Sens. 2019, 41, 53–73. [Google Scholar] [CrossRef]
- Shao, G.; Shao, G.; Gallion, J.; Saunders, M.R.; Frankenberger, J.R.; Fei, S. Improving Lidar-based aboveground biomass estimation of temperate hardwood forests with varying site productivity. Remote Sens. Environ. 2018, 204, 872–882. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Lu, D.; Chen, Q.; Wang, G.; Liu, L.; Li, G.; Moran, E.F. A survey of remote sensing-based aboveground biomass estimation methods in forest ecosystems. Int. J. Digit. Earth 2016, 9, 63–105. [Google Scholar] [CrossRef]
- Zhao, P.; Lu, D.; Wang, G.; Wu, C.; Huang, Y.; Yu, S. Examining Spectral Reflectance Saturation in Landsat Imagery and Corresponding Solutions to Improve Forest Aboveground Biomass Estimation. Remote Sens. 2016, 8, 469. [Google Scholar] [CrossRef] [Green Version]
- Zhao, P.; Lu, D.; Wang, G.; Liu, L.; Li, D.; Zhu, J.; Yu, S. Forest aboveground biomass estimation in Zhejiang Province using the integration of Landsat TM and ALOS PALSAR data. Int. J. Appl. Earth Obs. Geoinfor. 2016, 53, 1–15. [Google Scholar] [CrossRef]
- Feng, Y.; Lu, D.; Chen, Q.; Keller, M.; Moran, E.F.; Dos-Santos, M.; Bolfe, É.L.; Batistella, M. Examining effective use of data sources and modeling algorithms for improving biomass estimation in a moist tropical forest of the Brazilian Amazon. Int. J. Digit. Earth 2017, 50, 1–21. [Google Scholar] [CrossRef]
- Gao, Y.; Lu, D.; Li, G.; Wang, G.; Chen, Q.; Liu, L.; Li, D. Comparative Analysis of Modeling Algorithms for Forest Aboveground Biomass Estimation in a Subtropical Region. Remote Sens. 2018, 10, 627. [Google Scholar] [CrossRef] [Green Version]
- Saatchi, S.S.; Malhi, Y.; Zutta, B.; Buermann, W.; Anderson, L.O.; Araujo, A.M.; Phillips, O.L.; Peacock, J.; Ter Steege, H.; Gonzalez, G.L.; et al. Mapping landscape scale variations of forest structure, biomass, and productivity in Amazonia. Biogeosci. Discuss. 2009, 6, 5461–5505. [Google Scholar] [CrossRef] [Green Version]
- De Almeida, C.T.; Galvão, L.S.; Aragão, L.E.D.O.C.E.; Ometto, J.P.H.B.; Jacon, A.D.; Pereira, F.R.D.S.; Sato, L.Y.; Lopes, A.P.; Graça, P.M.L.D.A.; Silva, C.V.D.J.; et al. Combining LiDAR and hyperspectral data for aboveground biomass modeling in the Brazilian Amazon using different regression algorithms. Remote Sens. Environ. 2019, 232, 111323. [Google Scholar] [CrossRef]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene Selection for Cancer Classification using Support Vector Machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Huang, Y.; Shi, J.; Ouyang, C.; Lu, X. Real-time Observation Decoding and Positioning Analysis Based on Qianxun BeiDou Ground Based Augmentation System. Bull. Surv. Mapp. 2017, 9, 11–14. (In Chinese) [Google Scholar] [CrossRef]
- Jarron, L.R.; Coops, N.C.; MacKenzie, W.H.; Tompalski, P.; Dykstra, P. Detection of sub-canopy forest structure using airborne LiDAR. Remote Sens. Environ. 2020, 244, 111770. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Hyyppa, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Packalén, P.; Hyyppä, J. Estimation of stem volume using laser scanning-based canopy height metrics. Forestry 2006, 79, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Luo, S.; Lin, M.; Sun, Y. Study on Biomass and Net Primary Productivity of Podocarpus imbricatus Plantation in Jianfengling, Hainan Island. For. Res. 2004, 17, 598–604. (In Chinese) [Google Scholar]
- Li, Y. Comparative analysis of biomass estimation methods for tropical montane rain forest in Hainan Island. Acta Ecol. Sin. 1993, 13, 25–32. (In Chinese) [Google Scholar]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, L.; She, G. Estimating Forest Structural Parameters Using Canopy Metrics Derived from Airborne LiDAR Data in Subtropical Forests. Remote Sens. 2017, 9, 940. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Pan, J.; Li, R.; Li, J.; Li, Z. Integrating Airborne LiDAR and Optical Data to Estimate Forest Aboveground Biomass in Arid and Semi-Arid Regions of China. Remote Sens. 2018, 10, 532. [Google Scholar] [CrossRef] [Green Version]
- Gleason, C.J.; Im, J. Forest biomass estimation from airborne LiDAR data using machine learning approaches. Remote Sens. Environ. 2012, 125, 80–91. [Google Scholar] [CrossRef]
- Li, M.; Im, J.; Quackenbush, L.J.; Liu, T. Forest Biomass and Carbon Stock Quantification Using Airborne LiDAR Data: A Case Study Over Huntington Wildlife Forest in the Adirondack Park. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3143–3156. [Google Scholar] [CrossRef]
- Kuhn, M. Building Predictive Models in R Using the caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Osbourne, J.W.; Waters, E. Four assumptions of multiple regression that researchers should always test. Pract. Assess. Res. Eval. 2002, 8, 2. [Google Scholar]
- Breiman, L. Bagging Predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random Forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Cao, L.; Liu, K.; Shen, X.; Wu, X.; Liu, H. Estimation of Forest Structural Parameters Using UAV-LiDAR Data and a Process-Based Model in Ginkgo Planted Forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4175–4190. [Google Scholar] [CrossRef]
- Wang, D.; Wan, B.; Liu, J.; Su, Y.; Guo, Q.; Qiu, P.; Wu, X. Estimating aboveground biomass of the mangrove forests on northeast Hainan Island in China using an upscaling method from field plots, UAV-LiDAR data and Sentinel-2 imagery. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101986. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of Small Forest Areas Using an Unmanned Aerial System. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Kruger, L.M.; Midgley, J.J.; Cowling, R. Resprouters vs reseeders in South African forest trees; a model based on forest canopy height. Funct. Ecol. 1997, 11, 101–105. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Hartig, F.; Latifi, H.; Berger, C.; Hernandez, J.; Corvalan, P.; Koch, B. Importance of sample size, data type and prediction method for remote sensing-based estimations of aboveground forest biomass. Remote Sens. Environ. 2014, 154, 102–114. [Google Scholar] [CrossRef]
- Vafaei, S.; Soosani, J.; Adeli, K.; Fadaei, H.; Naghavi, H.; Pham, T.D.; Bui, D.T. Improving Accuracy Estimation of Forest Aboveground Biomass Based on Incorporation of ALOS-2 PALSAR-2 and Sentinel-2A Imagery and Machine Learning: A Case Study of the Hyrcanian Forest Area (Iran). Remote Sens. 2018, 10, 172. [Google Scholar] [CrossRef] [Green Version]
- Xie, B.; Cao, C.; Xu, M.; Bashir, B.; Singh, R.P.; Huang, Z.; Lin, X. Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data. Remote Sens. 2020, 12, 360. [Google Scholar] [CrossRef] [Green Version]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.-P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Valbuena, R.; Hernando, A.; Manzanera, J.-A.; Martínez-Falero, E.; García-Abril, A.; Mola-Yudego, B. Most similar neighbor imputation of forest attributes using metrics derived from combined airborne LIDAR and multispectral sensors. Int. J. Digit. Earth 2017, 11, 1–14. [Google Scholar] [CrossRef]
- Rennie, J.C. Comparison of Height-Measurement Techniques in a Dense Loblolly Pine Plantation. South. J. Appl. For. 1979, 3, 146–148. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and evaluating different LiDAR-derived canopy height model generation methods for tree height estimation. Int. J. Appl. Earth Obs. Geoinfor. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Latifi, H.; Fassnacht, F.E.; Koch, B. Forest structure modeling with combined airborne hyperspectral and LiDAR data. Remote Sens. Environ. 2012, 121, 10–25. [Google Scholar] [CrossRef]
- Mauya, E.W.; Hansen, E.H.; Gobakken, T.; Bollandsås, O.-M.; Malimbwi, R.; Næsset, E. Effects of field plot size on prediction accuracy of aboveground biomass in airborne laser scanning-assisted inventories in tropical rain forests of Tanzania. Carbon Balance Manag. 2015, 10, 1–14. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Plots (n) | DBH (cm) | H (m) | hT (m) | |||
|---|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | ||
| BWL | 29 | 14.59 | 1.33 | 10.43 | 0.71 | 5.90 | 0.54 |
| DLS | 31 | 14.19 | 1.56 | 10.47 | 1.26 | 4.38 | 0.93 |
| Total | 60 | 14.38 | 1.47 | 10.45 | 1.03 | 5.11 | 1.08 |
| Site | Plots (n) | G (m2/ha) | N (n/ha) | AGB (MG/ha) | HL (m) | hT (m) |
|---|---|---|---|---|---|---|
| BWL | 29 | 201.76 ± 44.08 | 958 ± 442 | 377.15 ± 123.59 | 15.82 ± 1.677 | 7.32 ± 0.70 |
| DLS | 31 | 189.27 ± 36.13 | 1122 ± 282 | 218.43 ± 67.83 | 13.39 ± 1.81 | 4.92 ± 1.17 |
| Total | 60 | 195.30 ± 40.31 | 1043 ± 375 | 295.14 ± 126.44 | 14.57 ± 2.12 | 6.08 ± 1.55 |
| LiDAR Metrics | Abbr. | Description |
|---|---|---|
| Height metrics | H_1th, H_5th, H_10th, H_20th, H_25th, H_30th, H_40th, H_50th, H_60th, H_70th, H_75th, H_80th, H_90th, H_95th, H_99th | Height percentiles. Point clouds are sorted according to the elevation. H_X is the Xth percentile of height. There are 15 height percentiles metrics from 1% to 99% height |
| H_MAE | Mean absolute error | |
| H_MAD | Median absolute deviation | |
| H_MAX | Maximum height | |
| H_MEAN | Mean height | |
| H_MEDIAM | Median of height | |
| H_SD | Standard deviation of heights | |
| H_V | Variance of heights | |
| H_SKE | Skewness of heights | |
| H_KURT | Kurtosis of heights | |
| H_CV | Coefficient of variation of height, (Zstd/Zmean) × 100% | |
| H_IQ | Interquartile distance of percentile height, H75th–H25th | |
| Density metrics | D_01, D_02, D_03, D_04, D_05, D_06, D_07, D_08, D_09, D_10 | Canopy return density. Point clouds are divided into slices with the same interval from low to high elevations. DX is the number of canopy return points in the Xth slice compared to the total points There are 10 density metrics in this study with an interval of 2.5 m from 0 to 25 m |
| H_CANOPY | Canopy relief ratio, (Hmean–Hmin)/(Hmax–Hmin) | |
| LAI | Leaf area index | |
| CC | Coverage closure | |
| GF | Gap fraction |
| Type | Abbr. | Model | R Package |
|---|---|---|---|
| Linear | LR | Linear Regression | caret, stats |
| Kernel-based | SVR | Support Vector Regression with Radial Basis | caret, e1071 |
| Tree-based | BT | Bagged Trees | caret, ipred |
| Random Forest | RF | Random Forest | caret, randomForest |
| Variable | Model | RMSE | rRMSE (%) |
|---|---|---|---|
| HL (m) | BT | 1.63 | 11.20% |
| RF | 1.55 | 10.64% | |
| LM | 1.75 | 12.05% | |
| SVR | 1.54 | 10.60% | |
| N (n/ha) | BT | 279 | 26.76% |
| RF | 284 | 27.21% | |
| LM | 311 | 29.79% | |
| SVR | 286 | 27.44% | |
| AGB (MG/ha) | BT | 90.66 | 30.72% |
| RF | 78.94 | 26.75% | |
| LM | 109.28 | 37.03% | |
| SVR | 92.07 | 31.19% | |
| G (m2/ha) | BT | 33.37 | 17.08% |
| RF | 30.03 | 15.37% | |
| LM | 39.13 | 20.04% | |
| SVR | 30.99 | 15.87% | |
| hT (m) | BT | 0.67 | 11.07% |
| RF | 0.63 | 10.34% | |
| LM | 0.87 | 14.27% | |
| SVR | 0.62 | 10.24% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Zhao, A.; Chen, Y.; Chen, Q.; Liu, H.; Wang, J.; Li, H. Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China. Forests 2020, 11, 1324. https://doi.org/10.3390/f11121324
Peng X, Zhao A, Chen Y, Chen Q, Liu H, Wang J, Li H. Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China. Forests. 2020; 11(12):1324. https://doi.org/10.3390/f11121324
Chicago/Turabian StylePeng, Xi, Anjiu Zhao, Yongfu Chen, Qiao Chen, Haodong Liu, Juan Wang, and Huayu Li. 2020. "Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China" Forests 11, no. 12: 1324. https://doi.org/10.3390/f11121324
APA StylePeng, X., Zhao, A., Chen, Y., Chen, Q., Liu, H., Wang, J., & Li, H. (2020). Comparison of Modeling Algorithms for Forest Canopy Structures Based on UAV-LiDAR: A Case Study in Tropical China. Forests, 11(12), 1324. https://doi.org/10.3390/f11121324