Spatial Estimation of the Latent Heat Flux in a Tropical Dry Forest by Using Unmanned Aerial Vehicles




Abstract
:1. Introduction
- To derive spatially distributed estimates of E;
- To show the performance of a contextual method (triangle method [22]) in high-resolution imagery in tropical dry forests;
- To trace the different contributions of E at tree and branch level in a tropical dry forest environment.
2. Methods
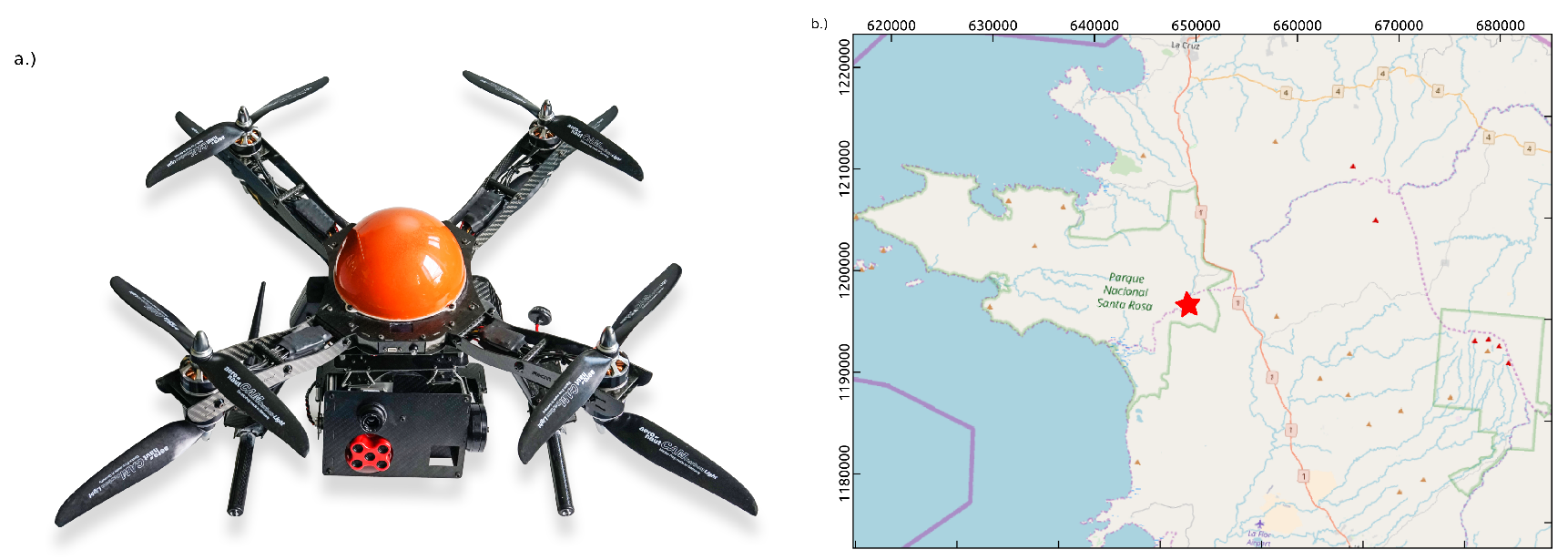
2.1. Study Site
2.2. UAV and Camera Payload
2.2.1. UAV System
2.2.2. Multi-Spectral Camera System
2.2.3. Thermal Camera System
2.3. Data
2.4. Camera Calibration
2.4.1. Multi-Spectral Camera System
2.4.2. Thermal Camera System
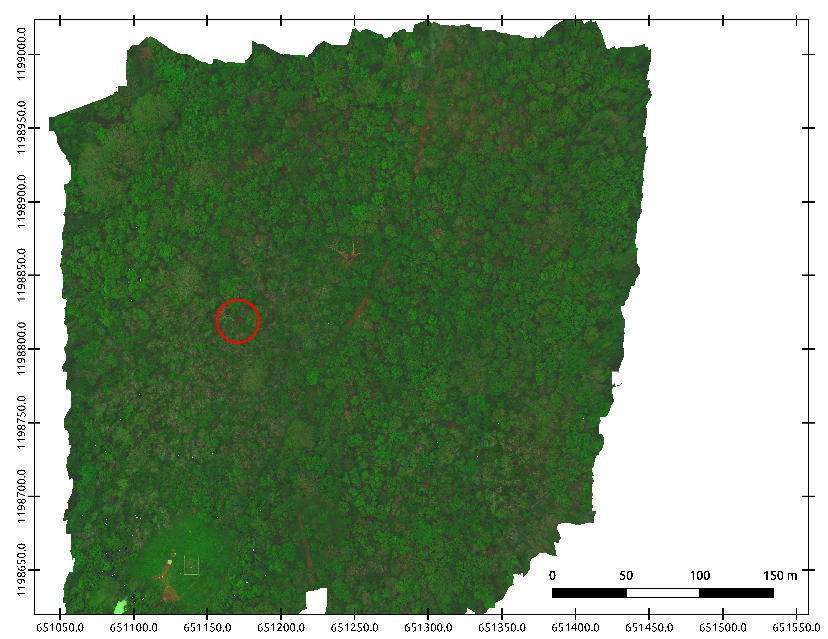
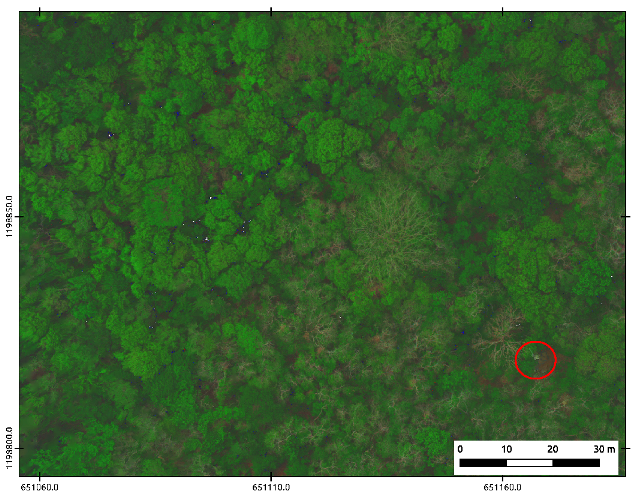
2.5. Orthomosaic Generation
2.6. Derivation of Latent Heat Flux Using the Semi-Empirical Triangle Method
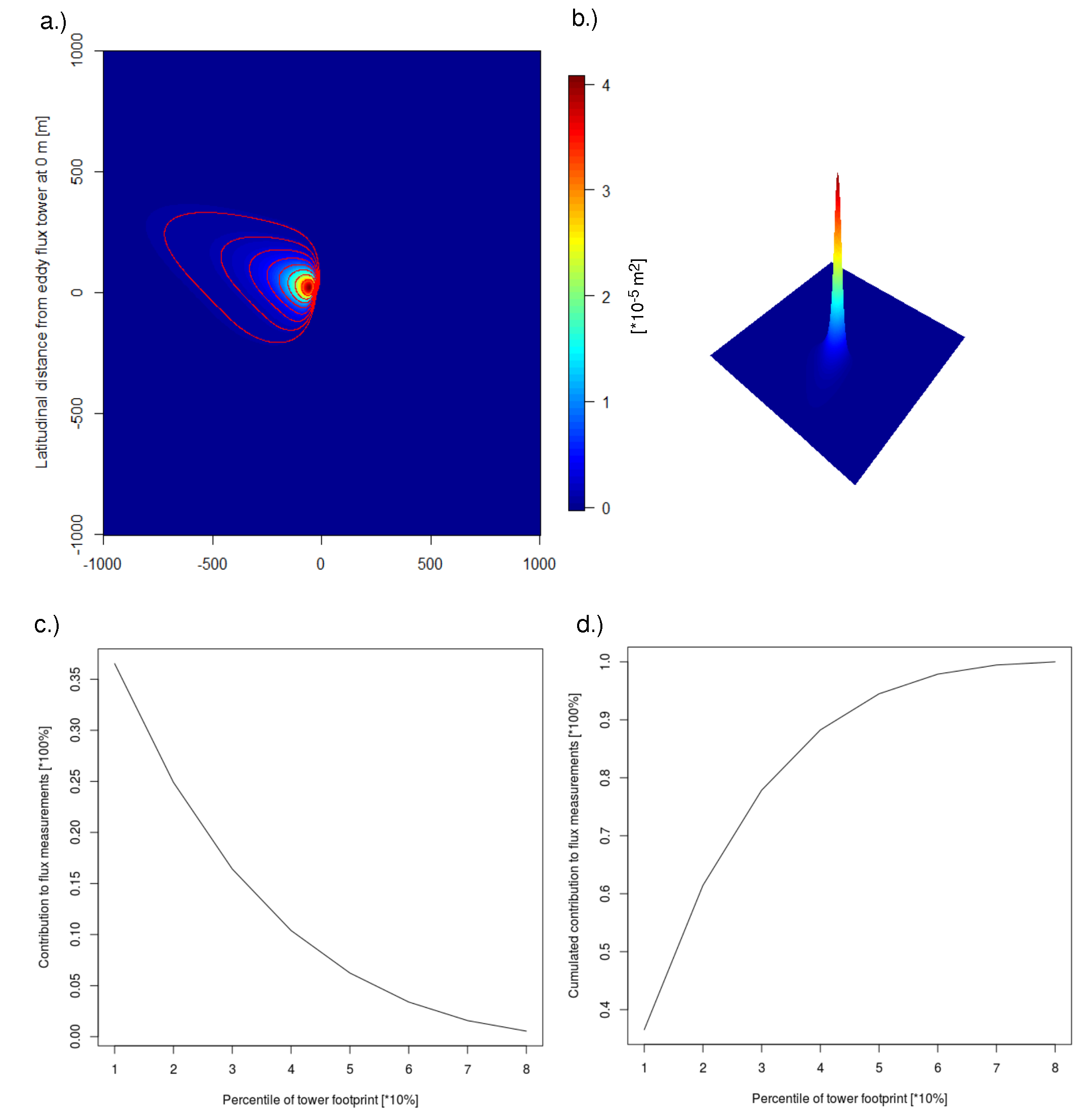
2.7. E-Flux Measurements and Footprint Estimation
2.8. Validation of E Retrievals
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fischer, J.; Melton, F.; Middleton, E.; Hain, C.; Anderson, M.; Allen, R.; McCabe, M. The Future of Evapotranspiration. Global requirements for ecosystem functioning, carbon and climate feedbacks, agricultural management, and water resources. Water Resour. Res. 2017, 53, 2618–2626. [Google Scholar] [CrossRef]
- Loew, A.; Bell, W.; Brocca, L.; Bulgin, C.E.; Burdanowitz, J.; Calbet, X.; Donner, R.V.; Ghent, D.; Gruber, A.; Kaminski, T.; et al. Validation practices for satellite-based Earth observation data across communities. Rev. Geophys. 2017, 55, 779–817. [Google Scholar] [CrossRef] [Green Version]
- Castro, S.M.; Sanchez-Azofeifa, G.A.; Sato, H. Effect of drought on productivity in a Costa Rican tropical dry forest. Environ. Res. Lett. 2018, 13, 045001. [Google Scholar]
- Venturini, V.; Bisht, G.; Islam, S.; Jiang, L. Comparison of evaporative fractions estimated from AVHRR and MODIS sensors over South Florida. Remote Sens. Environ. 2004, 93, 77–86. [Google Scholar] [CrossRef]
- de Tomás, A.; Nieto, H.; Guzinski, R.; Salas, J.; Sandholt, I.; Berliner, P. Validation and scale dependencies of the triangle method for the evaporative fraction estimation over heterogeneous areas. Remote Sens. Environ. 2014, 152, 493–511. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The need for accurate geometric and radiometric corrections of drone-borne hyperspectral data for mineral exploration: MEPHySTo—A toolbox for pre-processing drone-borne hyperspectral data. Remote Sens. 2017, 9, 88. [Google Scholar]
- Sutherland, G.; Chasmer, L.; Kljun, N.; Devito, K.; Petrone, M. Using High Resolution LiDAR Data and a Flux Footprint Parametrization to Scale Evapotranspiration Estimates to Lower Pixel Resolution. Can. J. Remote Sens. 2017, 43, 215–229. [Google Scholar] [CrossRef] [Green Version]
- Kljun, N.; Calanca, P.; Rotach, M.W.; Schmid, H.P. A simple two-dimensional parameterisation for Flux Footprint Prediction (FFP). Geosci. Model. Dev. 2015, 8, 3695–3713. [Google Scholar] [CrossRef] [Green Version]
- Gamon, J. Reviews and Syntheses: Optical sampling of the flux tower footprint. Biogeoscience 2015, 12, 4509–4523. [Google Scholar]
- Hoffmann, H.; Nieto, H.; Jensen, R.; Guzinski, R.; Zarco-Tejada, P.; Friborg, T. Estimating evaporation with thermal UAV data and two-source energy balance models. Hydrol. Earth Syst. Sci. 2016, 20, 697–713. [Google Scholar]
- Chávez, J.; Hathaway, J. Developing an Unmanned Aerial Remote Sensing of ET System. In Proceedings of the ASABE Annual International Meeting, Orlando, FL, USA, 17–20 July 2016. [Google Scholar]
- Ortega-Farías, S.; Ortega-Salazar, S.; Poblete, T.; Kilic, A.; Allen, R.; Poblete-Echeverría, C.; Ahumada-Orellana, L.; Zuñiga, M.; Daniel, S. Estimation of Energy Balance Components over a Drip-Irrigated Olive Orchard Using Thermal and Multispectral Cameras Placed on a Helicopter-Based Unmanned Aerial Vehicle (UAV). Remote Sens. 2016, 8, 638. [Google Scholar] [CrossRef] [Green Version]
- Brenner, C.; Zeeman, M.; Bernhardt, M.; Schulz, K. Estimation of evapotranspiration of temperate grassland based on high-resolution thermal and visible range imagery from unmanned aerial systems. Int. J. Remote Sens. 2018, 39, 5141–5174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carlson, T. An Overview of the Triangle Method for Estimating Surface Evapotranspiration and Soil Moisture from Satellite Imagery. Sensors 2007, 7, 1612–1629. [Google Scholar] [CrossRef] [Green Version]
- Price, J. Using spatial context in satellite data to infer regional scale evapotranspiration. IEEE Trans. Geosci. Remote Sens. 1990, 28, 940–948. [Google Scholar] [CrossRef] [Green Version]
- Norman, J.M.; Kustas, W.P.; Humes, K.S. Source approach for estimating soil and vegetation energy fluxes in observations of directional radiometric surface temperature. Agric. For. Meteorol. 1995, 77, 263–293. [Google Scholar] [CrossRef]
- Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Knipper, K.; Torres-Rua, A.; Parry, C.K.; Nieto, H.; Agam, N.; White, W.A.; Gao, F.; et al. The Grape Remote Sensing Atmospheric Profile and Evapotranspiration Experiment. Bull. Am. Meteorol. Soc. 2018, 99, 1791–1812. [Google Scholar] [CrossRef] [Green Version]
- Kustas, W.P.; Alfieri, J.G.; Anderson, M.C.; Colaizzi, P.D.; Prueger, J.H.; Evett, S.R.; Neale, C.M.U.; French, A.N.; Hipps, L.E.; Chávez, J.L.; et al. Evaluating the two-source energy balance model using local thermal and surface flux observations in a strongly advective irrigated agricultural area. Adv. Water Resour. 2012, 50, 120–133. [Google Scholar] [CrossRef] [Green Version]
- Xia, T.; Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Gao, F.; McKee, L.; Prueger, J.H. Mapping Evapotranspiration with High-Resolution Aircraft Imagery over Vineyards Using One-And Two-Source Modeling Schemes. Hydrol. Earth Syst. Sci. 2016, 20, 1523–1545. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Garcia, M.; Ibrom, A.; Jakobsen, J.; Josef Köppl, C.; Mallick, K.; Looms, M.; Bauer-Gottwein, P. Mapping Root-Zone Soil Moisture Using a Temperature–Vegetation Triangle Approach with an Unmanned Aerial System: Incorporating Surface Roughness from Structure from Motion. Remote Sens. 2018, 10, 1978. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Garcia, M.; Bauer-Gottwein, P.; Jakobsen, J.; Zarco-Tejada, P.J.; Bandini, F.; Paz, V.S.; Ibrom, A. High spatial resolution monitoring land surface energy, water and CO2 fluxes from an Unmanned Aerial System. Remote Sens. Environ. 2019, 229, 14–31. [Google Scholar] [CrossRef]
- Jiang, L.; Islam, S. A methodology for estimation of surface evapotranspiration over large areas using remote sensing observations. Geophys. Res. Lett. 1999, 26, 2773–2776. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-Azofeifa, G.; Guzmán-Quesada, J.; Vega-Araya, M.; Campos-Vargas, C.; Durán, S.; D’Souza, N.; Gianoli, T.; Portillo-Quintero, C.; Sharp, I. Can terrestrial laser scanners (TLSs) and hemispherical photographs predict tropical dry forest succesion with liana abundance. Biogeosciences 2017, 14, 977–988. [Google Scholar] [CrossRef] [Green Version]
- Miura, T.; Huete, A.R. Performance of three reflectance calibration methods for airborne hyperspectral spectrometer data. Sensors 2009, 9, 794–813. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.; Steppe, K. Estimating evapotranspiration and drought stress with ground-based thermal remote sensing in agriculture: A review. J. Exp. Bot. 2012, 63, 4671–4712. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iqbal, F.; Lucieer, A.; Barry, K. Simplified radiometric calibration for UAS-mounted multispectral sensor. Eur. J. Remote Sens. 2018, 51, 301–313. [Google Scholar] [CrossRef]
- Yuan, X.; Laakso, K.; Marzahn, P.; Sanchez-Azofeifa, G.A. Canopy Temperature Differences between Liana-Infested and Non-Liana Infested Areas in a Neotropical Dry Forest. Forests 2019, 10, 890. [Google Scholar] [CrossRef] [Green Version]
- Carlson, T.; Capehart, W.; Gillies, R. A new look at the simplified method for remote-sensing of daily evapotranspiration. Remote Sens. Environ. 1995, 54, 161–167. [Google Scholar] [CrossRef]
- Stisen, S.; Sandholt, I.; Nørgaard, A.; Fensholt, R.; Høgh Jensen, K. Combining the Triangle Method with thermal inertia to estimate regional evapotranspiration: Applied to MSG-SEVIRI data in the Senegal River basin. Remote Sens. Environ. 2008, 112, 1242–1255. [Google Scholar] [CrossRef]
- Tang, R.; Li, Z.; Tang, B. An application of the Ts-VI Triangle Method with enhanced edges determination for evapotranspiration estimation from MODIS data in arid and semi-arid regions—Implementation and validation. Remote Sens. Environ. 2010, 114, 540–551. [Google Scholar] [CrossRef]
- Meyer, S.; Blaschek, M.; Duttmann, R.; Ludwig, R. Improved hydrological model parametrization for climate change impact assessment under data scarcity: The potential of field monitoring teqhniques and geostatistics. Sci. Total Environ. 2016, 543, 906–923. [Google Scholar] [CrossRef]
- Gampe, D.; Ludwig, R.; Qahman, K.; Afifi, S. Applying the Triangle Method for the parametrization of irrigated areas as input for spatially distributed hydrological modeling: Assessing future drought risk in the Gaza Strip (Palestine). Sci. Total Environ. 2016, 543, 877–888. [Google Scholar] [CrossRef]
- Batra, N.; Islam, S.; Venturini, V.; Bisht, G.; Liang, L. Estimation and comparison of evapotranspiration from MODIS and AVHRR sensors for clear sky days over the southern Great Plains. Remote Sens. Environ. 2006, 103, 1–15. [Google Scholar]
- Wang, K.; Cribb, M. Estimation of evaporative fraction from a combination of day and night land surface temperatures and NDVI—A new method to determine the Priestley-Taylor parameter. Remote Sens. Environ. 2006, 102, 293–305. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus Hippocastanum L. and Acer Platanoides L. Leaves. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Sims, D.; Gamon, J. Relationships Between Leaf Pigment Content and Spectral Reflectance Across a Wide Range of Species. Leaf Structures and Developmental Stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Gampe, D.; Huber-García, V.; Marzahn, P.; Ludwig, R. Estimating actual evapotranspiration from remote sensing imagery using R: The package’ TriangleMethod. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017. Number 18636. [Google Scholar]
- Kljun, N.; Calanca, P.; Rotach, M.; Schmid, H. A simple parameterisation for flux footprint predictions. Bound. Layer Meteorol. 2004, 112, 503–523. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Torres-Sánchez, J.; Peña, J.M.; García-Ferrer, A.; Castillejo-González, I.L.; López Granados, F. Generating UAV accurate ortho-mosaicked images using a six-band multispectral camera arrangement. In Proceedings of the 2014 RHEA Conference, Madrid, Spain, 20–22 May 2014. [Google Scholar]
- Aicardi, I.; Nex, F.; Gerke, M.; Lingua, A.M. An image-based approach for the co-registration of multi-temporal UAV image datasets. Remote Sens. 2017, 8, 779. [Google Scholar]
- Li, W.; Campos-Vargas, C.; Marzahn, P.; Sanchez-Azofeifa, A. On the estimation of tree mortality and liana infestation using a deep self-encoding network. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 1–13. [Google Scholar] [CrossRef]
- Vescovo, L.; Wohlfahrt, G.; Balzarolo, M.; Pilloni, S.; Sottocornola, M.; Rodeghiero, M.; Gianelle, D. New spectral vegetation indices based on the near-infrared shoulder wavelengths for remote detection of grassland phytomass. Int. J. Remote Sens. 2012, 33, 2178–2195. [Google Scholar] [CrossRef] [Green Version]
- Miura, T.; Huete, A.; Ferreira, L.; Sano, E.; Yoshioka, H. Hyperspectral Remote Sensing of Tropical and Sub-tropical Forests; Chapter A Technique for Reflectance Calibration of Airborne Hyperspectral Spectrometer Data Using a Broad, Multiband Radiometer; CRC Press: Boca Raton, FL, USA, 2008; pp. 213–232. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Micasense RedEdge | FLIR TAU2 640 |
|---|---|---|
| Dimensions [m] | 0.121 × 0.066 × 0.046 | 0.045 × 0.045 × 0.060 |
| Weight | 150 g | 95 g |
| Spectral bands | ||
| (Center wavelength and bandwidth per channel [nm]) | Blue 475 (20), green 560 (20), red 668 (10), red edge 717 (10), near IR 840 (40), narrow band | 7500–13,500, broad band |
| Resolution | 1280 × 980 pixels | 640 × 512 pixels |
| Focal length | 0.0055 m | 0.013 m |
| GSD at 100 m above ground | 0.07 m (per band) | 0.13 |
| Field of View | 47.2° HFOV | 45° × 37° 1.308 mr |
| Parameter | Sensor | Remarks |
|---|---|---|
| LST | UAV-FLIR TAU2 640 | Images were acquired at an altitude of 100 m above ground (canopy layer) |
| VIS-NIR | UAV-Micasense | Images were acquired at an altitude of 100 m above ground (canopy layer) |
| Kipp & Zonen CNR4 Net Radiometer | Net-radiation was measured every 10 min at the EC system | |
| G | HukseFlux HFP01SC | Soil heat flux was measured every 10 min within the footprint of the EC system |
| Decagon VP-3 | Air temperature was measured every 10 min at the EC system and within the EC footprint | |
| RH | Decagon VP-3 | Relative humidity was measured every 10 min at the EC system and within the EC footprint |
| E | Licor LI-7500DS & Gill Windmaster | Fluxes were measured at 10 Hz and integrated over a time span of 30 min and analyzed using Licor’s EddyPro software |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marzahn, P.; Flade, L.; Sanchez-Azofeifa, A. Spatial Estimation of the Latent Heat Flux in a Tropical Dry Forest by Using Unmanned Aerial Vehicles. Forests 2020, 11, 604. https://doi.org/10.3390/f11060604
Marzahn P, Flade L, Sanchez-Azofeifa A. Spatial Estimation of the Latent Heat Flux in a Tropical Dry Forest by Using Unmanned Aerial Vehicles. Forests. 2020; 11(6):604. https://doi.org/10.3390/f11060604
Chicago/Turabian StyleMarzahn, Philip, Linda Flade, and Arturo Sanchez-Azofeifa. 2020. "Spatial Estimation of the Latent Heat Flux in a Tropical Dry Forest by Using Unmanned Aerial Vehicles" Forests 11, no. 6: 604. https://doi.org/10.3390/f11060604
APA StyleMarzahn, P., Flade, L., & Sanchez-Azofeifa, A. (2020). Spatial Estimation of the Latent Heat Flux in a Tropical Dry Forest by Using Unmanned Aerial Vehicles. Forests, 11(6), 604. https://doi.org/10.3390/f11060604