
sUAS for 3D Tree Surveying: Comparative Experiments on a Closed-Canopy Earthen Dam



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. Drone Flights and Data Sets
2.3. Approaches
2.3.1. Building sUAS Orthoimages and Point Clouds
2.3.2. Extracting Digital Terrain and Canopy Height
2.3.3. Tree Surveying: Tree Height, Treetops, and Crowns
2.3.4. Comparison Analysis and Validation
3. Results
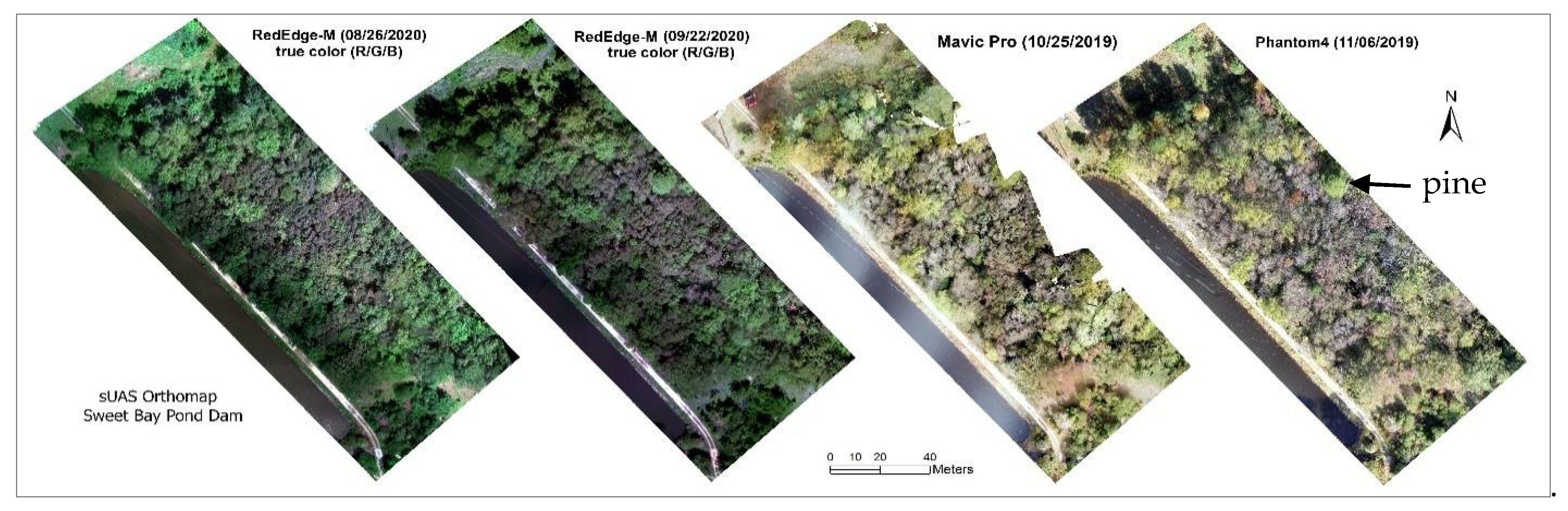
3.1. Orthoimage and Point Cloud
3.2. Digital Terrain and CHM
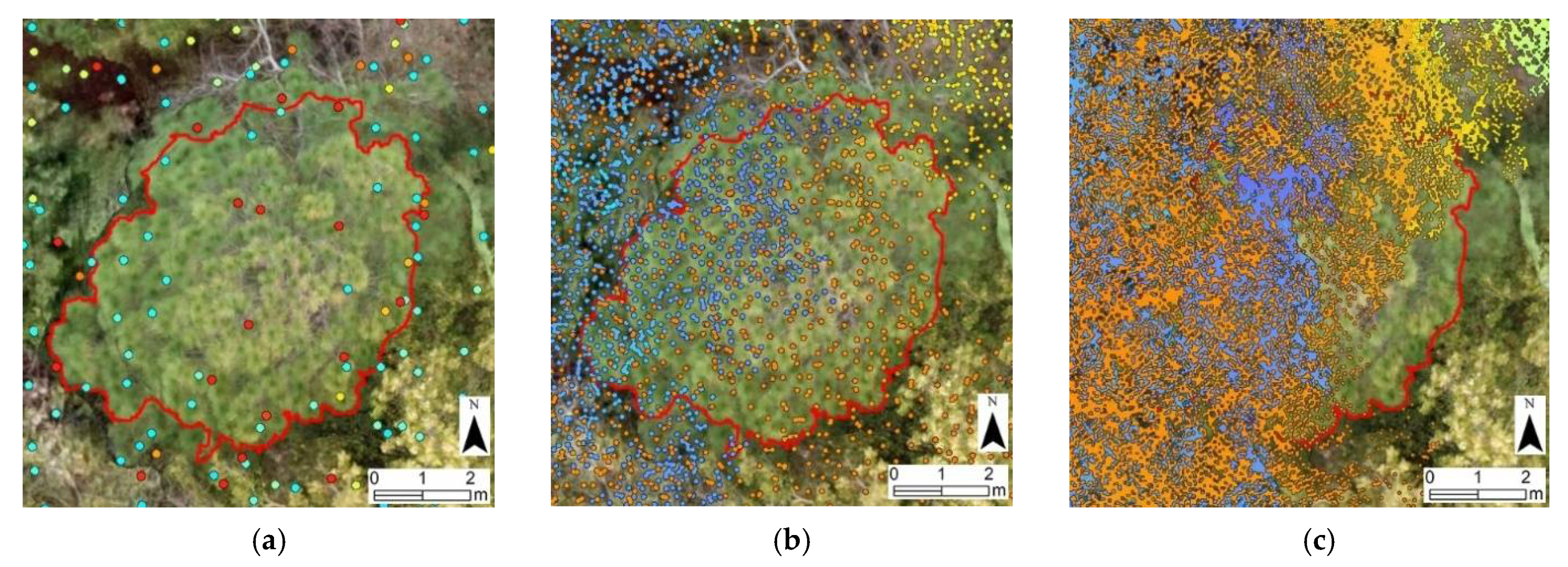
3.3. Treetop and Crown Delineation
3.4. Comparison and Accuracy Assessment
3.4.1. Comparison of Elevation (z) Measurement against LiDAR
3.4.2. Locational and CHM Comparison of Treetops against RE0922
3.4.3. Visual Comparison of Treetop/Crown Extraction
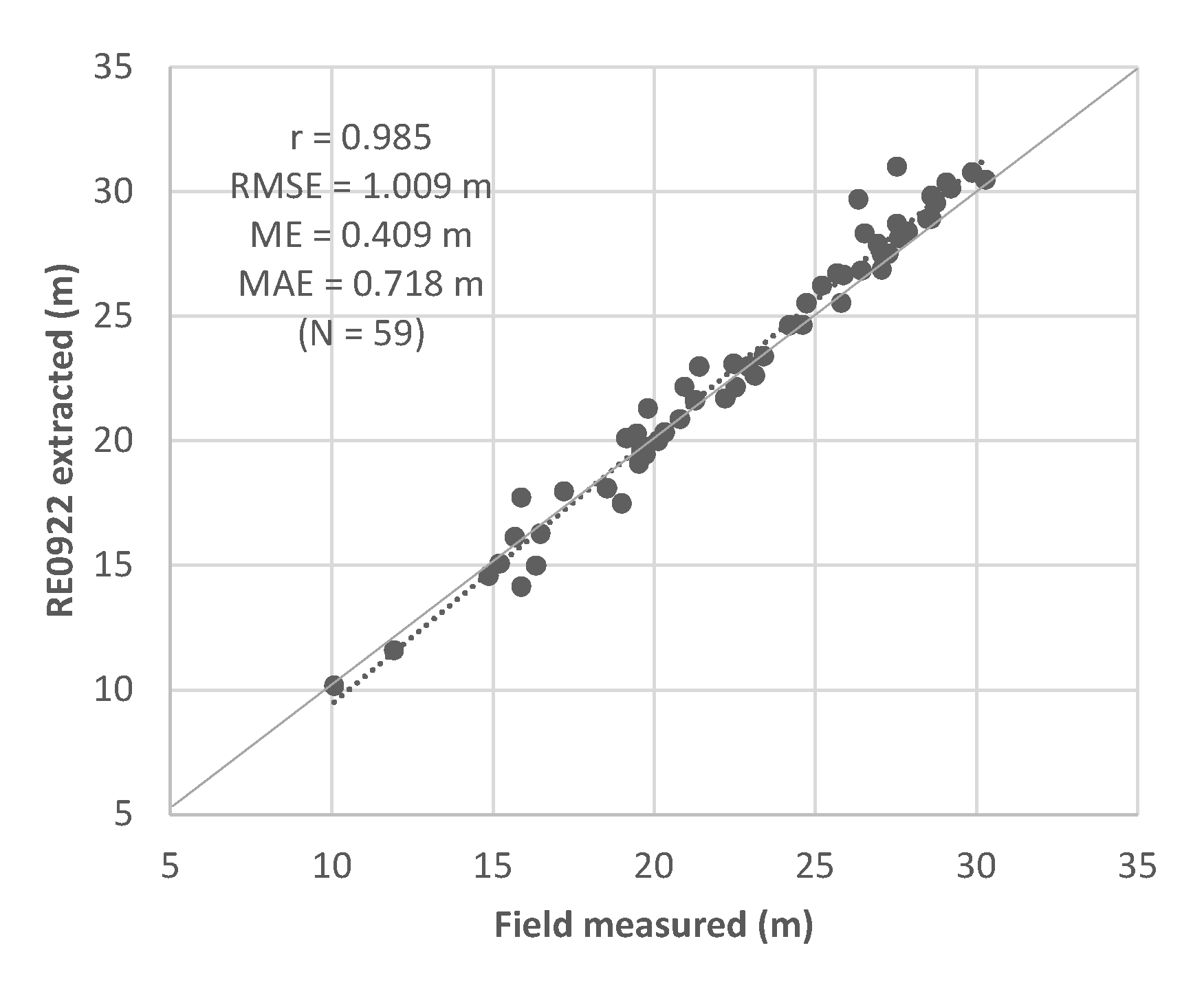
3.4.4. Accuracy Assessment of sUAS-Extracted Tree Height
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Inventory of Dams (NID). The 2018 National Inventory of Dams. 2018. Available online: http://nid.usace.army.mil (accessed on 4 December 2020).
- Rahmstorf, S. Rising hazard of storm-surge flooding. Proc. Natl. Acad. Sci. USA 2017, 114, 11806–11808. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vecchi, G.A.; Knutson, T.R. Historical Changes in Atlantic Hurricane and Tropical Storms. 2018. Available online: https://www.gfdl.noaa.gov/historical-atlantic-hurricane-and-tropical-storm-records/ (accessed on 4 December 2020).
- Sasanakul, I.; Gassman, S.; Pierce, C.; Ovalle, W.; Starcher, R.; Gheibi, E.; Rahman, M. Dam Failure from the October 2015 Historic Flood Event in South Carolina, Asce Geotech. Spec. Publ. (GSP) 2017, 278, 244–254. [Google Scholar]
- SC Department of Health and Environment Control (SDHEC). The State of the Dams: Investment in the Protection of South Carolina’s People, Natural Resources, and Infrastructure through Dam Safety–A Report on the State of Dam Safety in South Carolina. 2020. Available online: https://scdhec.gov/BOW/dams-reservoirs (accessed on 4 December 2020).
- Federal Emergency Management Agency (FEMA). Technical Manual for Dam Owners: Impacts of Plants on Earthen Dams, FEMA Document 534. 2005. Available online: https://www.fema.gov/media-library-data/20130726-1446-20490-2338/fema-534.pdf (accessed on 30 December 2020).
- Andersen, H.E.; Mcgaughey, R.S.; Reutebuch, E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Amiri, N.; Yao, W.; Heurich, M.; Krzystek, P.; Skidmore, A.K. Estimation of regeneration coverage in a temperate forest by 3D segmentation using airborne laser scanning data. Int. J. Appli. Earth Obs.. Geoinf. 2016, 52, 252–262. [Google Scholar] [CrossRef]
- Morgan, G.; Hodgson, M.E.; Wang, C. Using sUAS-derived point cloud to supplement LiDAR returns for improved canopy height model on earthen dams. Pap. Appl. Geogr. 2020, 6, 436–448. [Google Scholar] [CrossRef]
- Jensen, J.R. Drone Aerial Photography and Videography: Data collection and image interpretation. 2017 (e-book). Available online: https://www.jensendroneaerialphotographyvideography.com/ (accessed on 25 February 2021).
- Gundlach, J. Civil and Commercial Unmanned Aircraft Systems; AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote sensing of vegetation structure using computer vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Patter Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 519–526.
- Hyyppä, J.; Hyyppä, H.D.; Leckie, F.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Dalponte, M.; Reyes, F.; Kandare, K.; Gianelle, D. Delineation of individual tree crowns from ALS and hyperspectral data: A comparison among four methods. Eur. J. Remote Sens. 2015, 48, 365–382. [Google Scholar] [CrossRef] [Green Version]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, L.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 122, 210–223. [Google Scholar]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Jaafar, W.S.W.M.; Woodhouse, I.H.; Silva, C.A.; Omar, H.; Maulud, K.N.A.; Hudak, A.T.; Klauberg, C.; Cardil, A.; Mohan, M. Improving individual tree crown delineation and attributes estimation of tropical forests using airborne LiDAR data. Forests 2018, 9, 759. [Google Scholar] [CrossRef] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2016, 38, 2392–2410. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Zhang, Z.; Yu, R.; Tian, Q.; Zhu, X. Extraction of information about individual trees from high-spatial-resolution UAV-acquired images of an orchard. Remote Sens. 2020, 12, 133. [Google Scholar] [CrossRef] [Green Version]
- Federal Aviation Administration (FAA). Fact Sheet - Small Unmanned Aircraft Systems (UAS) Regulations (Part 107). Released on 6 October 2020. Available online: https://www.faa.gov/news/fact_sheets (accessed on 21 January 2021).
- Emlid Reach RS2 Docs, 2021. Precise Point Positioning (PPP). Available online: https://docs.emlid.com/reachrs2/common/tutorials/ppp-introduction/ (accessed on 25 February 2021).
- National Geodetic Survey (NGS). NOAA’s Online Positioning User Service (OPUS). 2021. Available online: https://www.ngs.noaa.gov/INFO/OnePagers/OPUSOnePager.pdf (accessed on 25 February 2021).
- U.S. Geological Survey (USGS). USGS Lidar Point Cloud (LPC) SC_LexingtonCo_2010_000827 2014-0913 LAS, U.S. Geological Survey. Published on 13 September 2014.
- SC Department of Natural Resources (SCDNR). LiDAR and Related Data Products. 2015. Available online: http://www.dnr.sc.gov/GIS/lidar.html (accessed on 20 February 2019).
- Heidemann, H.K. Lidar Base Specification, V1.3. U.S. Geological Survey (USGS) Techniques and Methods. Chapter B4, in Book 11-Collection and Delineation of Spatial Data. 101 p. Revised February 2018. 2018. Available online: https://doi.org/10.3133/tm11b4 (accessed on 21 January 2021).
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and evaluating different LiDAR-derived canopy height model generation methods for tree height estimation. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Smith, H.C. Height of Tallest Saplings in 10-Year Old Appalachian Hardwood Clearcuts. Forest Service Research Paper NE-381, Forest Service, U.S. Department of Agriculture, Northeastern Forest Experiment Station. 1977. Available online: https://www.fs.fed.us/ne/newtown_square/publications/research_papers/pdfs/scanned/OCR/ne_rp381.pdf (accessed on 25 February 2021).
- Popescu, S.C.; Wynne, R.H. The trees in the forest. Photogramm. Eng. Remote Sens. 2004, 70, 589–604. [Google Scholar]
- Vincent, L.; Soille, P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations, IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 583–598. [Google Scholar] [CrossRef] [Green Version]
- Meyer, F.; Beucher, S. Morphological segmentation. J. Vis. Commun. Image Represent. 1990, 1, 21–46. [Google Scholar] [CrossRef]
- U.S. Forest Service (USFS). Unmanned Aircraft System (UAS) – Forest Service Standards for UAS Operations. U.S. Department of Agriculture. 2020. Available online: https://www.fs.usda.gov/sites/default/files/2020-07/Forest%20Service%20Standards%20for%20UAS%20Operations%2007012020.pdf (accessed on 25 February 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Drone | Flight Alt. (m) | Flight Path | Images | Area (ha) | GSD 1 (cm) | GCP 2 | RMSE (cm) | Calib. Rate |
|---|---|---|---|---|---|---|---|---|---|
| 25/10/2019 | Mavic Pro | 60 | Cross-grid | 141 | 2.62 | 1.96 | 10 | 2.8 | 95% |
| 06/11/2019 | Mavic Pro | 60 | Long-grid | 195 | 2.33 | 1.92 | 8 | / | 71% |
| Phantom 4 Pro | 60 | Double-grid | 217 | 5.01 | 1.87 | 8 | 2.9 | 93% | |
| 26/08/2020 | Mavic Pro | 60 | Short-grid | 72 | 1.51 | 1.83 | 9 | / | 58% |
| M100 | 60 | Short-grid | 1280 * | 3.00 | 4.19 | 13 | 1.5 | 91% | |
| 22/09/2020 | M100 | 90 | Short-grid | 1390 * | 4.08 | 5.41 | 9 | 3.1 | 92% |
| Code | Class | Points | Percent | z_min | z_max | Interpreted Land Cover |
|---|---|---|---|---|---|---|
| 1 | Unclassified | 28,411 | 73.42% | 48.61 | 78.69 | Vegetation |
| 2 | Ground | 9063 | 23.42% | 48.43 | 52.65 | Bare earth |
| 8 | Model key | 922 | 2.38% | 48.43 | 52.70 | Bare earth |
| 11 | Road Surface | 232 | 0.60% | 48.61 | 51.90 | Bare earth |
| 3,9 | Other | 67 | 0.17% | 50.45 | 52.33 | Water, low veg |
| Total points | 38,695 | 100% | ||||
| sUAS Mission | MP1025 | P41106 | RE0826 | RE0922 | LiDAR (2010) | ||
|---|---|---|---|---|---|---|---|
| Dam crest (n = 27) | z | MAE | 8.32 | 4.89 | 4.81 | 3.59 | reference |
| ME | 7.41 | −0.05 | −4.81 | −1.71 | |||
| RMSE | 13.38 | 6.39 | 5.45 | 4.65 | |||
| Treetop (n = 40) | x | MAE | / | 37.0 | 26.25 | reference | / |
| ME | / | 37.0 | −3.8 | ||||
| RMSE | / | 47.33 | 40.70 | ||||
| y | MAE | / | 61.5 | 26.9 | |||
| ME | / | −61.5 | 7.5 | ||||
| RMSE | / | 68.04 | 36.74 | ||||
| CHM | MAE | / | 36.8 | 14.59 | |||
| ME | / | −22.05 | −0.72 | ||||
| RMSE | / | 46.21 | 19.78 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Morgan, G.; Hodgson, M.E. sUAS for 3D Tree Surveying: Comparative Experiments on a Closed-Canopy Earthen Dam. Forests 2021, 12, 659. https://doi.org/10.3390/f12060659
Wang C, Morgan G, Hodgson ME. sUAS for 3D Tree Surveying: Comparative Experiments on a Closed-Canopy Earthen Dam. Forests. 2021; 12(6):659. https://doi.org/10.3390/f12060659
Chicago/Turabian StyleWang, Cuizhen, Grayson Morgan, and Michael E. Hodgson. 2021. "sUAS for 3D Tree Surveying: Comparative Experiments on a Closed-Canopy Earthen Dam" Forests 12, no. 6: 659. https://doi.org/10.3390/f12060659
APA StyleWang, C., Morgan, G., & Hodgson, M. E. (2021). sUAS for 3D Tree Surveying: Comparative Experiments on a Closed-Canopy Earthen Dam. Forests, 12(6), 659. https://doi.org/10.3390/f12060659