
Failure Detection in Eucalyptus Plantation Based on UAV Images



Abstract
:1. Introduction
1.1. Background
1.2. Aim
1.3. Related Work
2. Materials and Methods
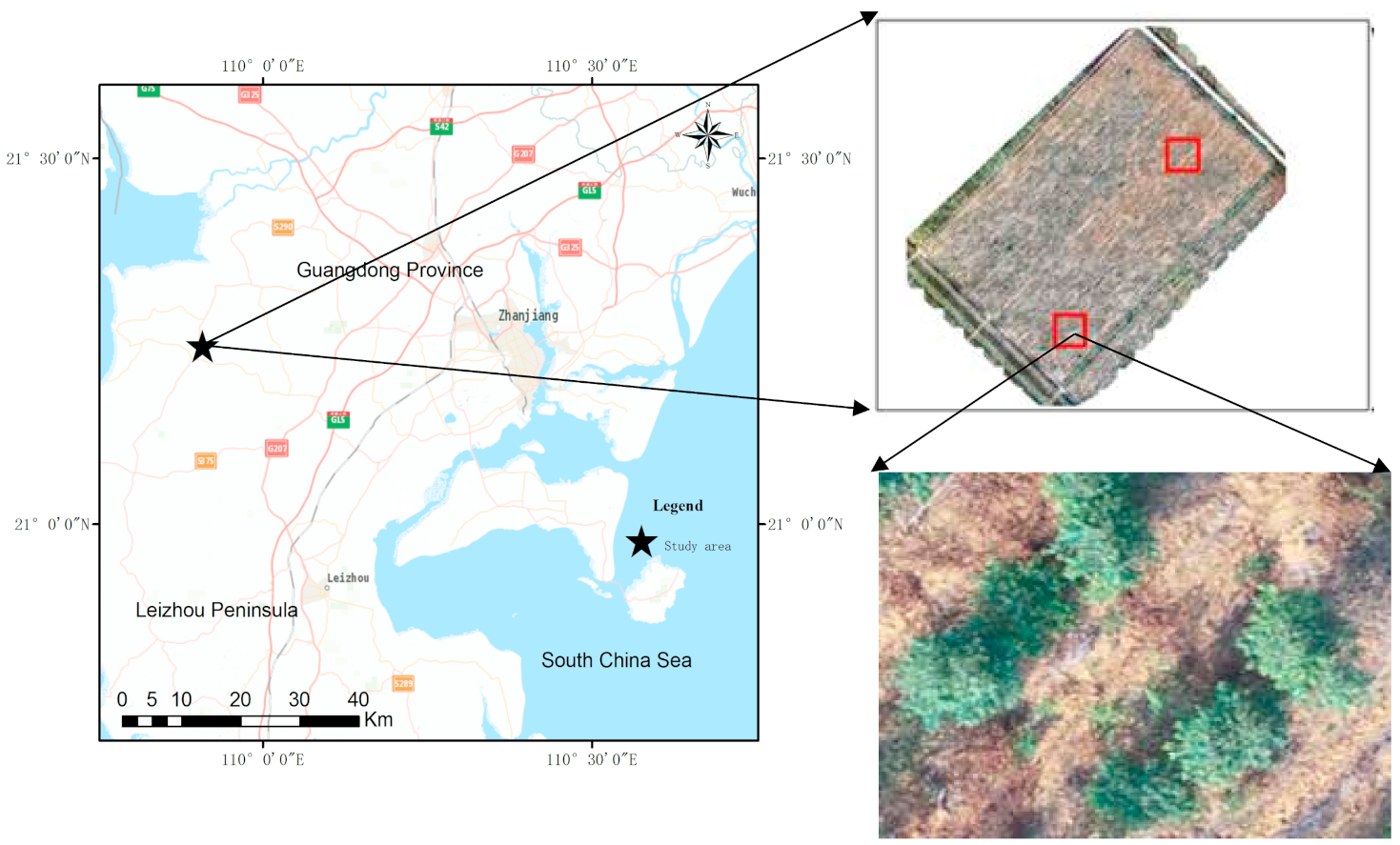
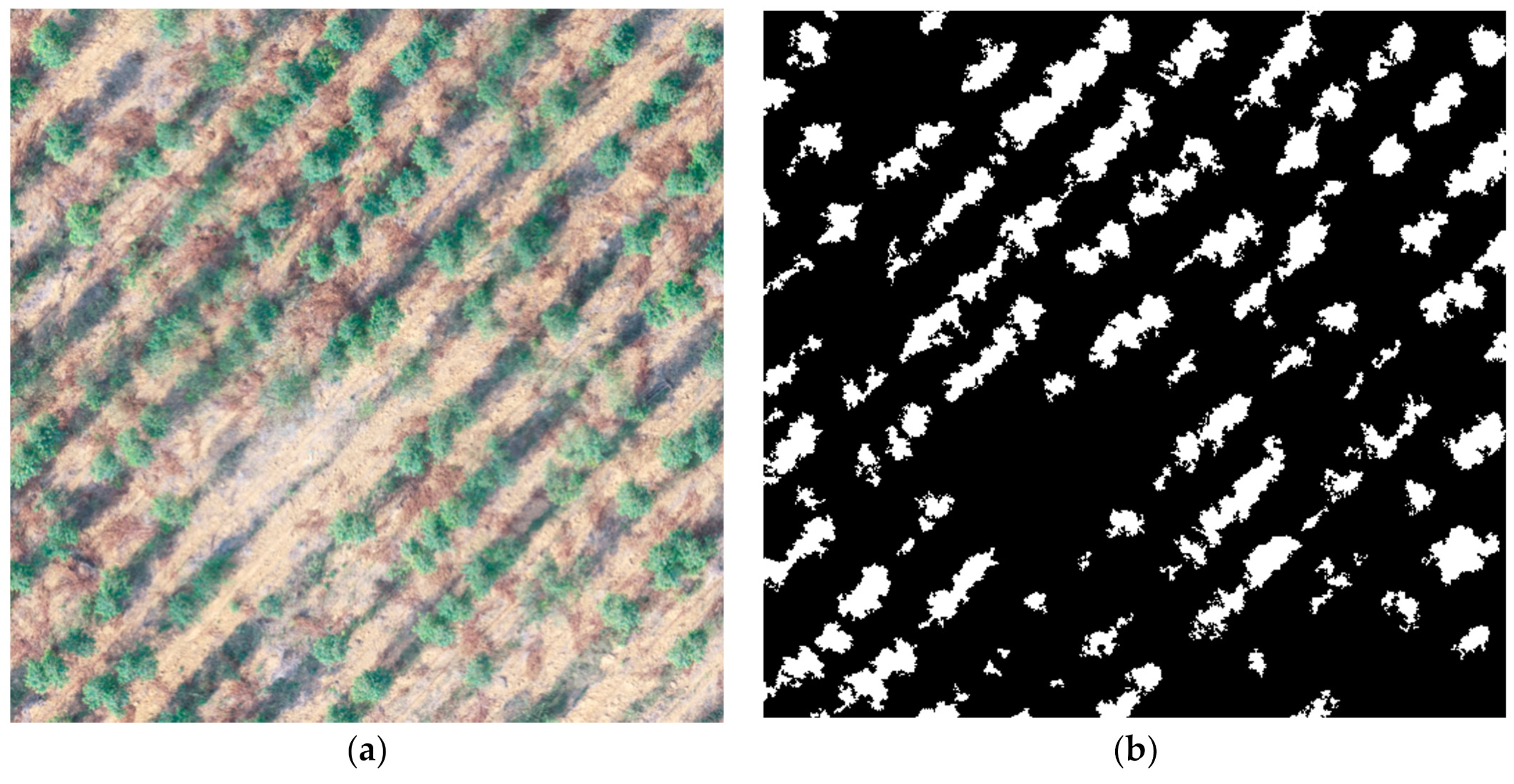
2.1. Study Area and Datasets
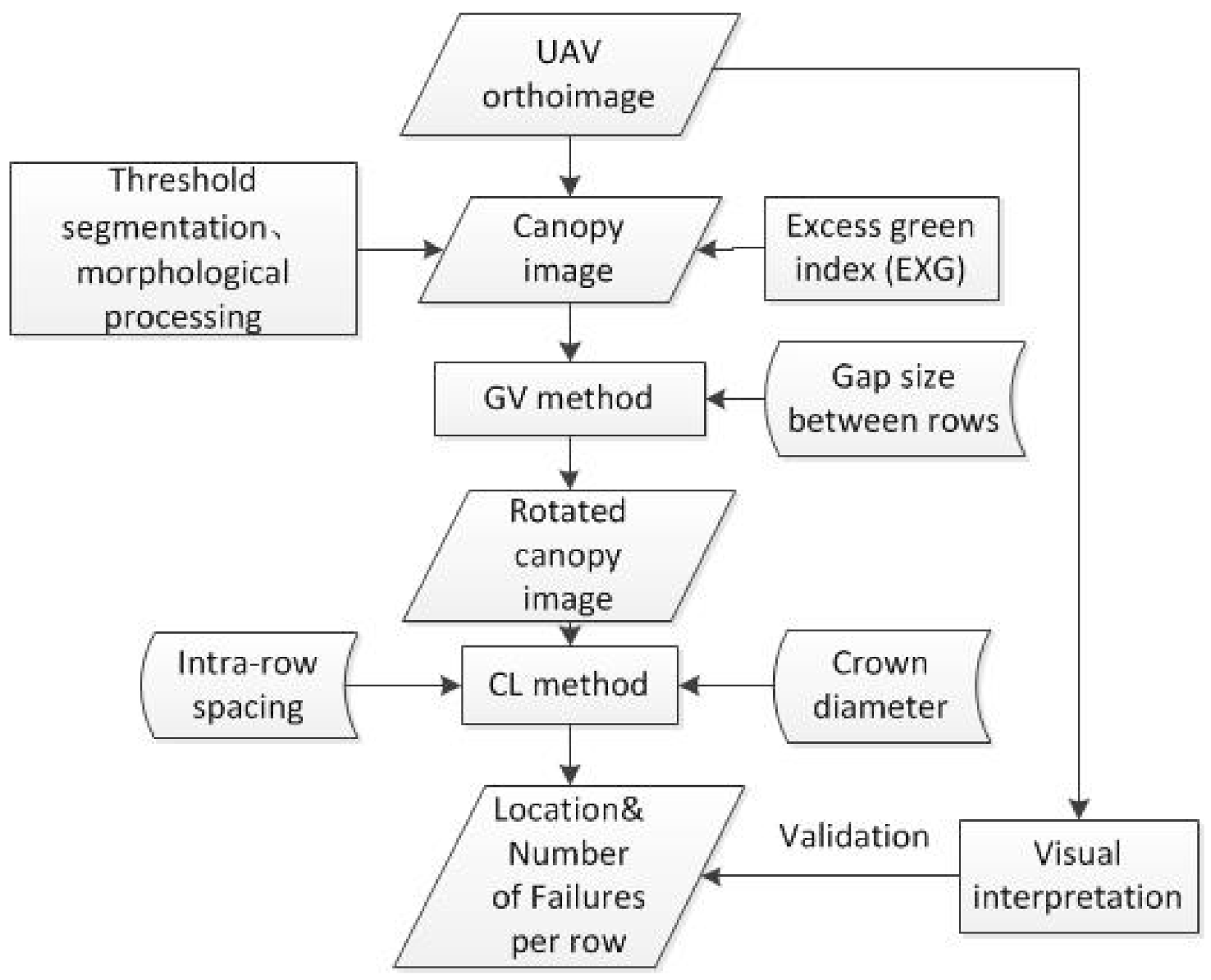
2.2. Methodology
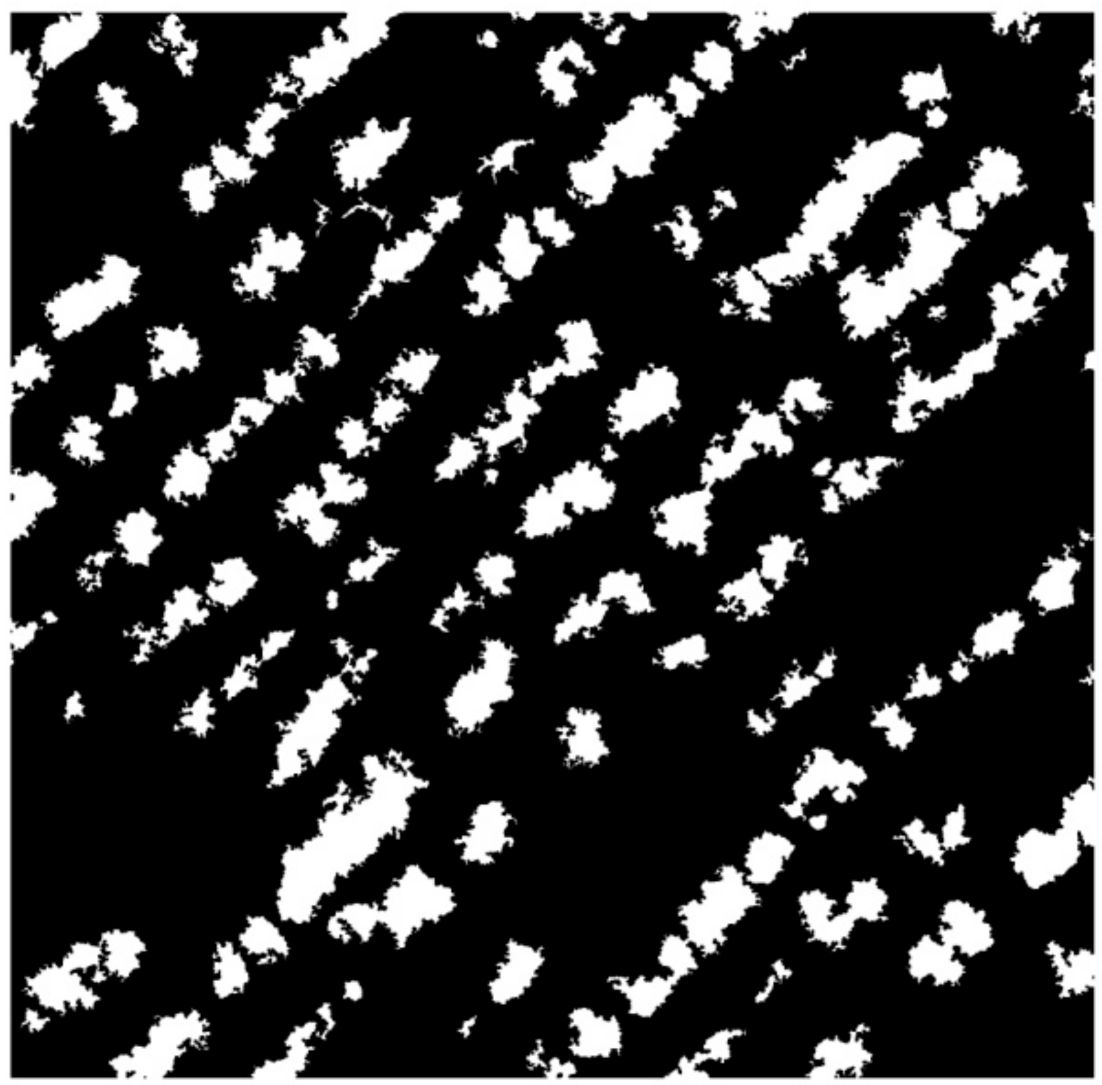
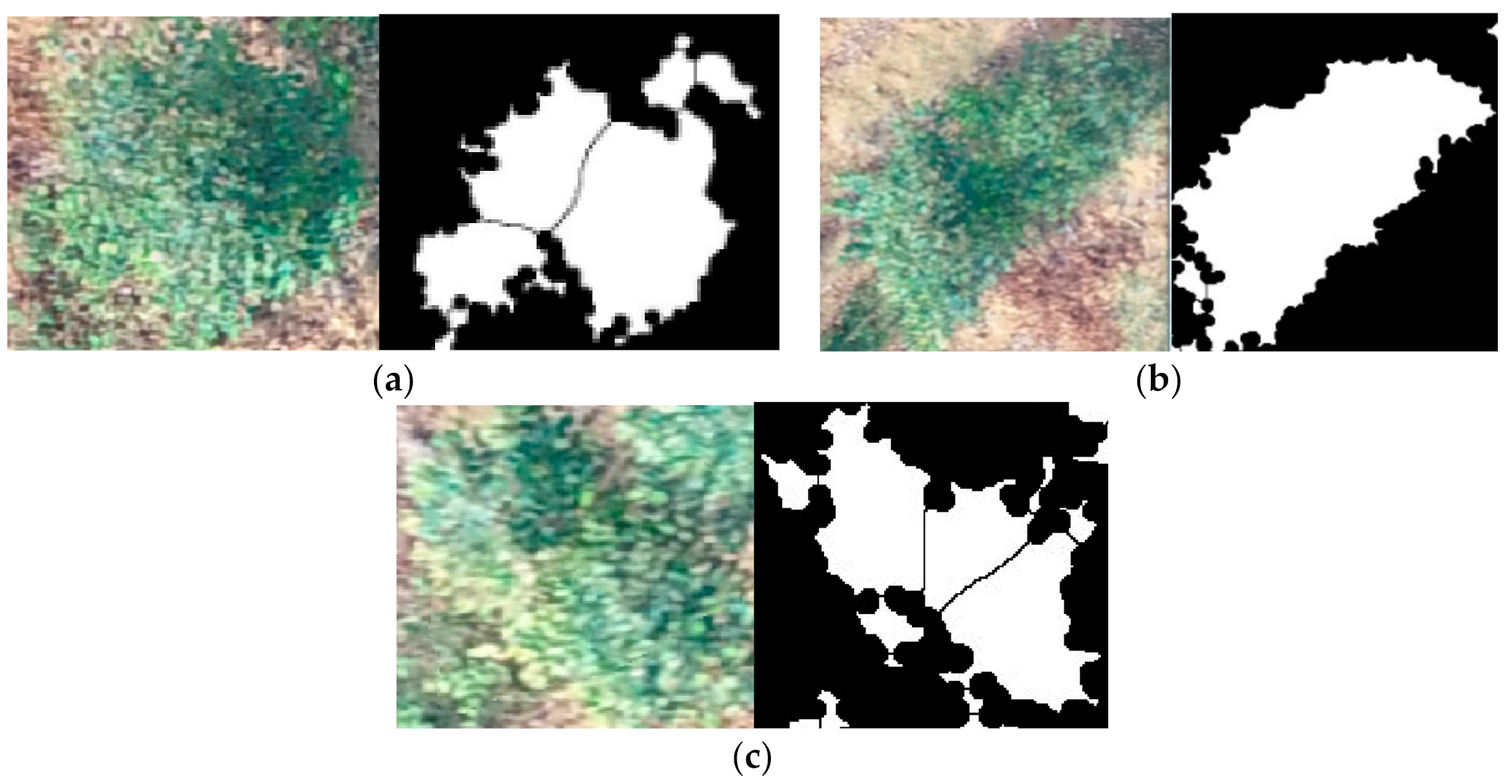
2.2.1. Seedling Recognition
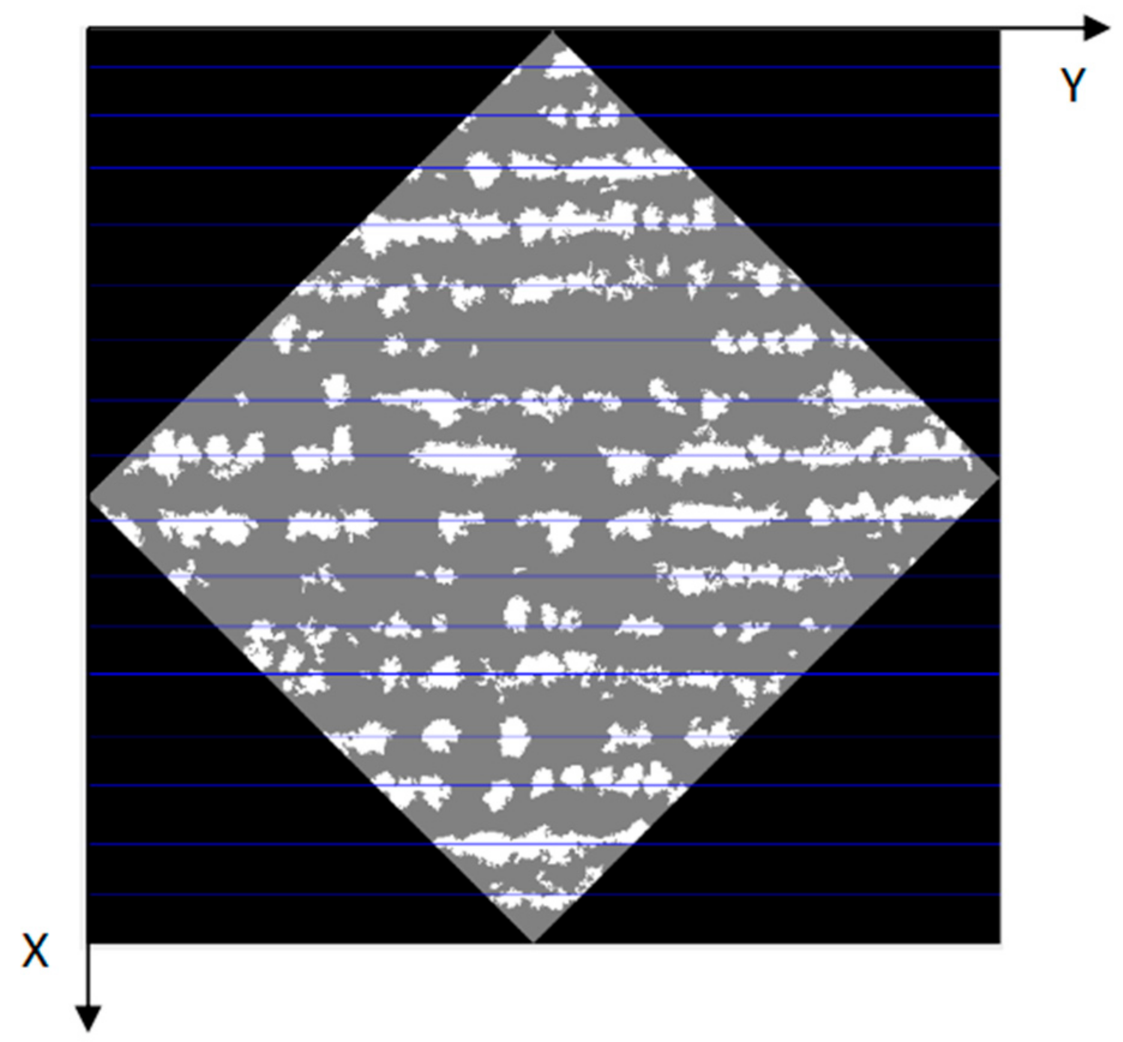
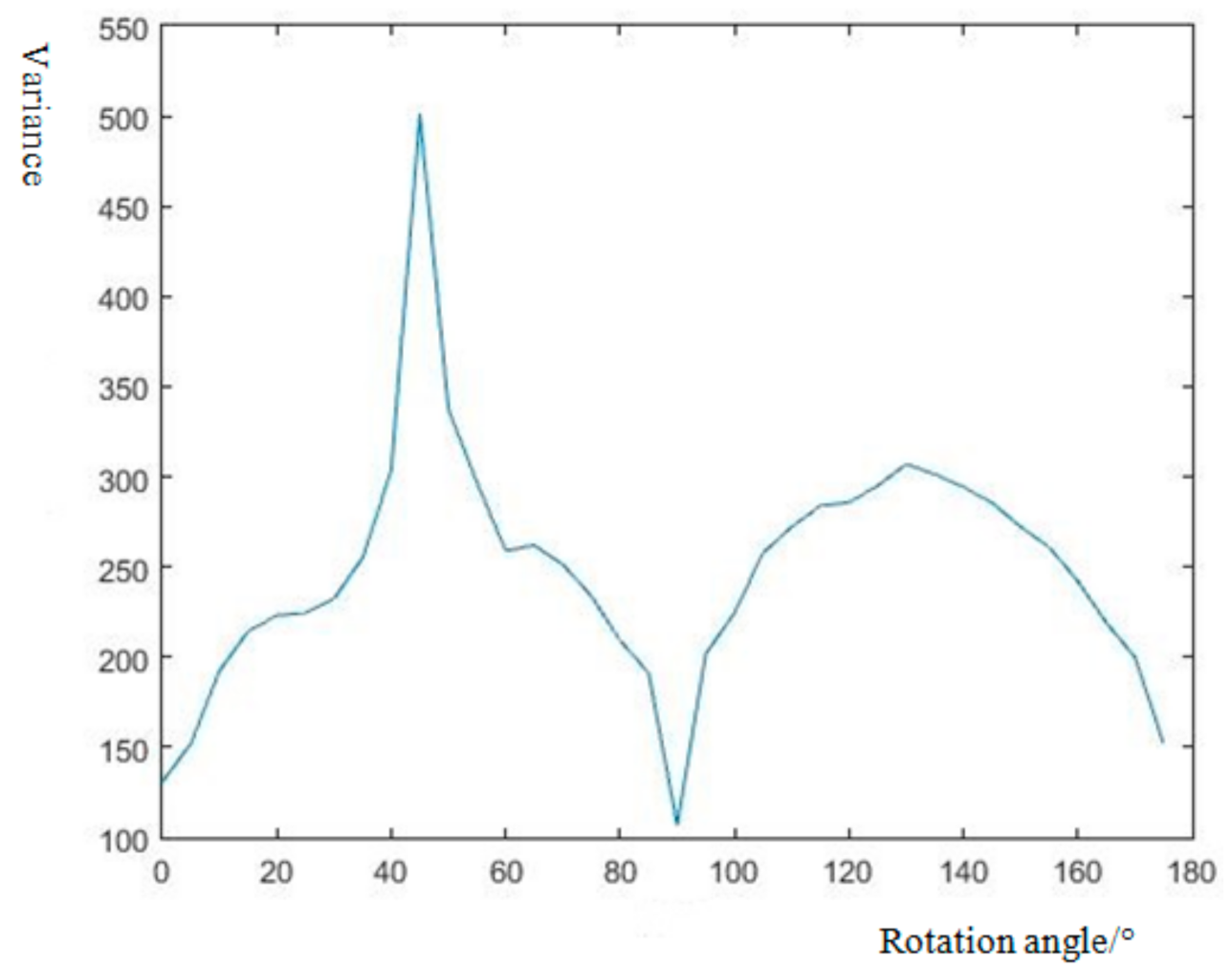
2.2.2. Interpretation of the Direction Angle of Seedling Rows in the Orthoimage by the GV Method
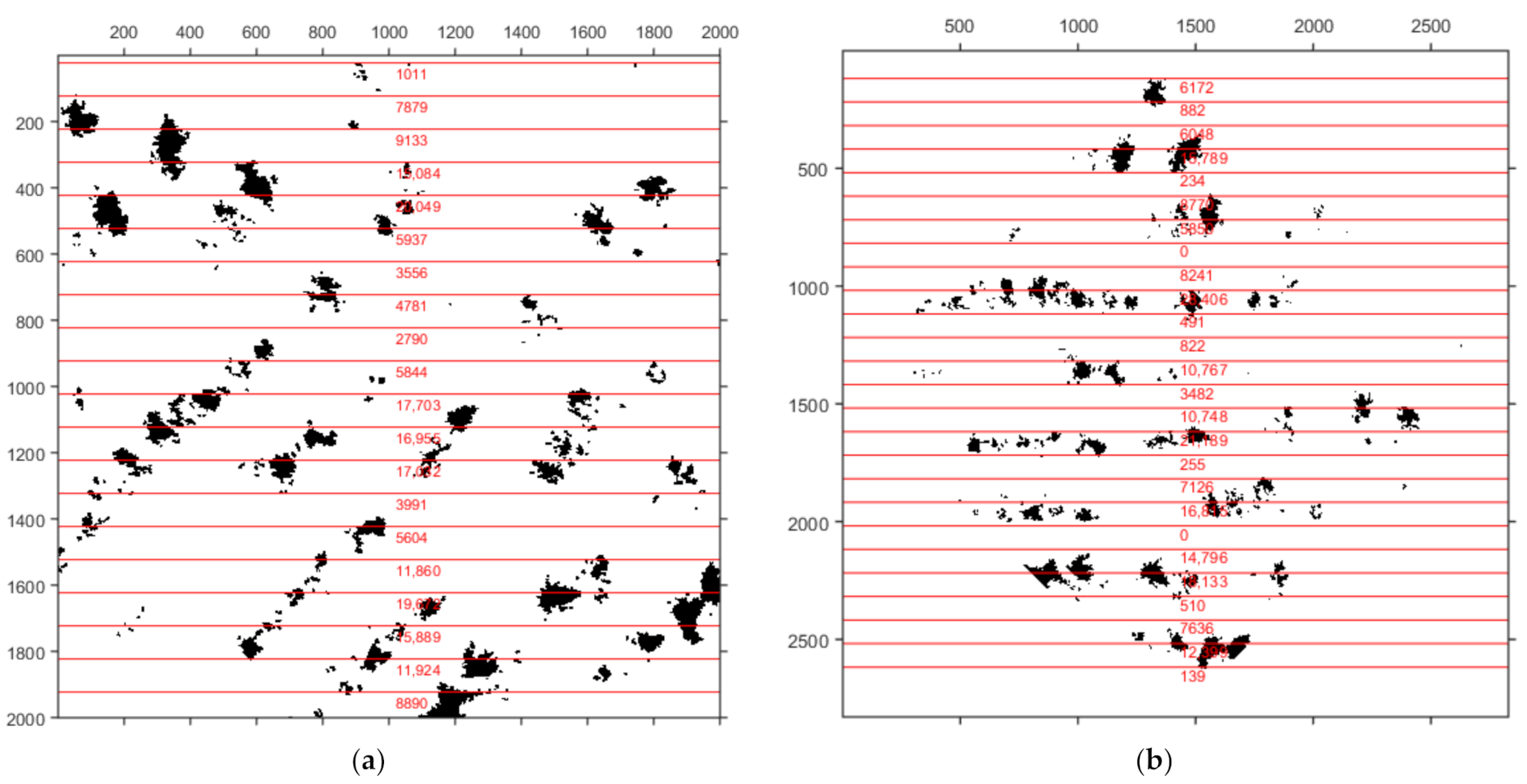
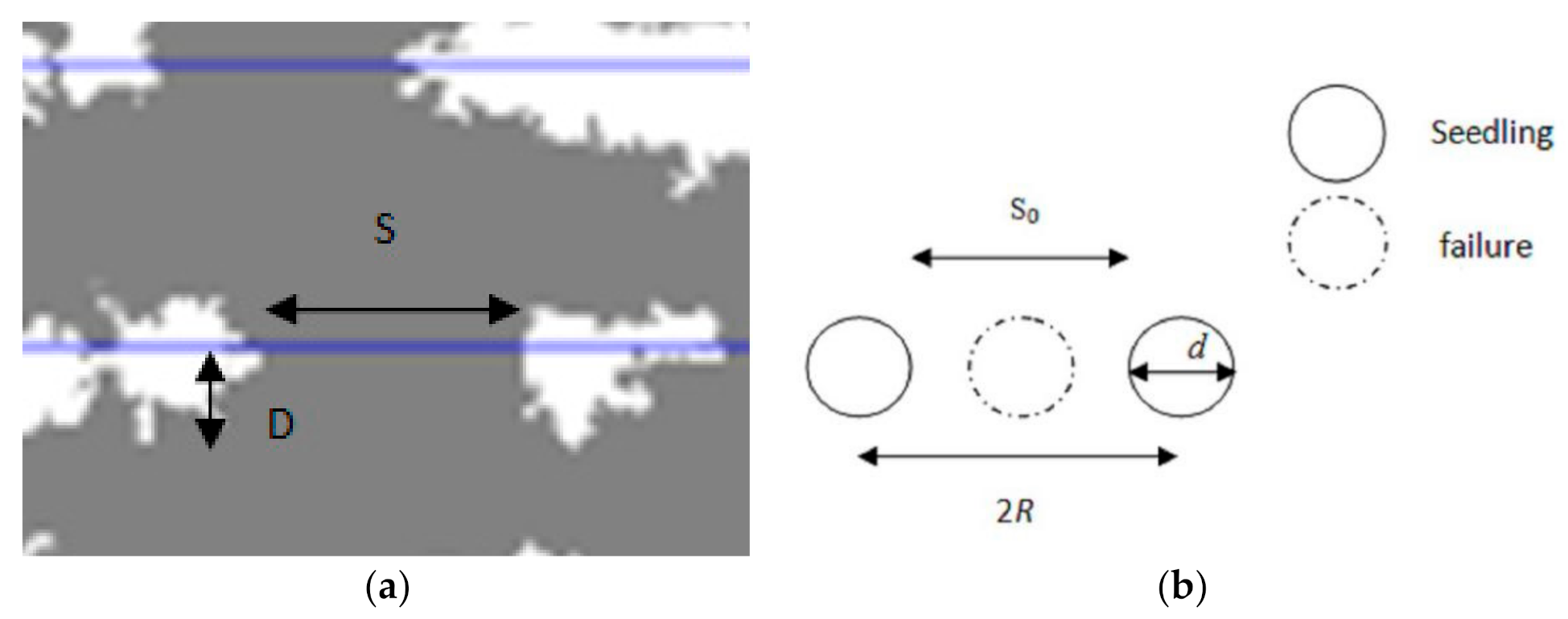
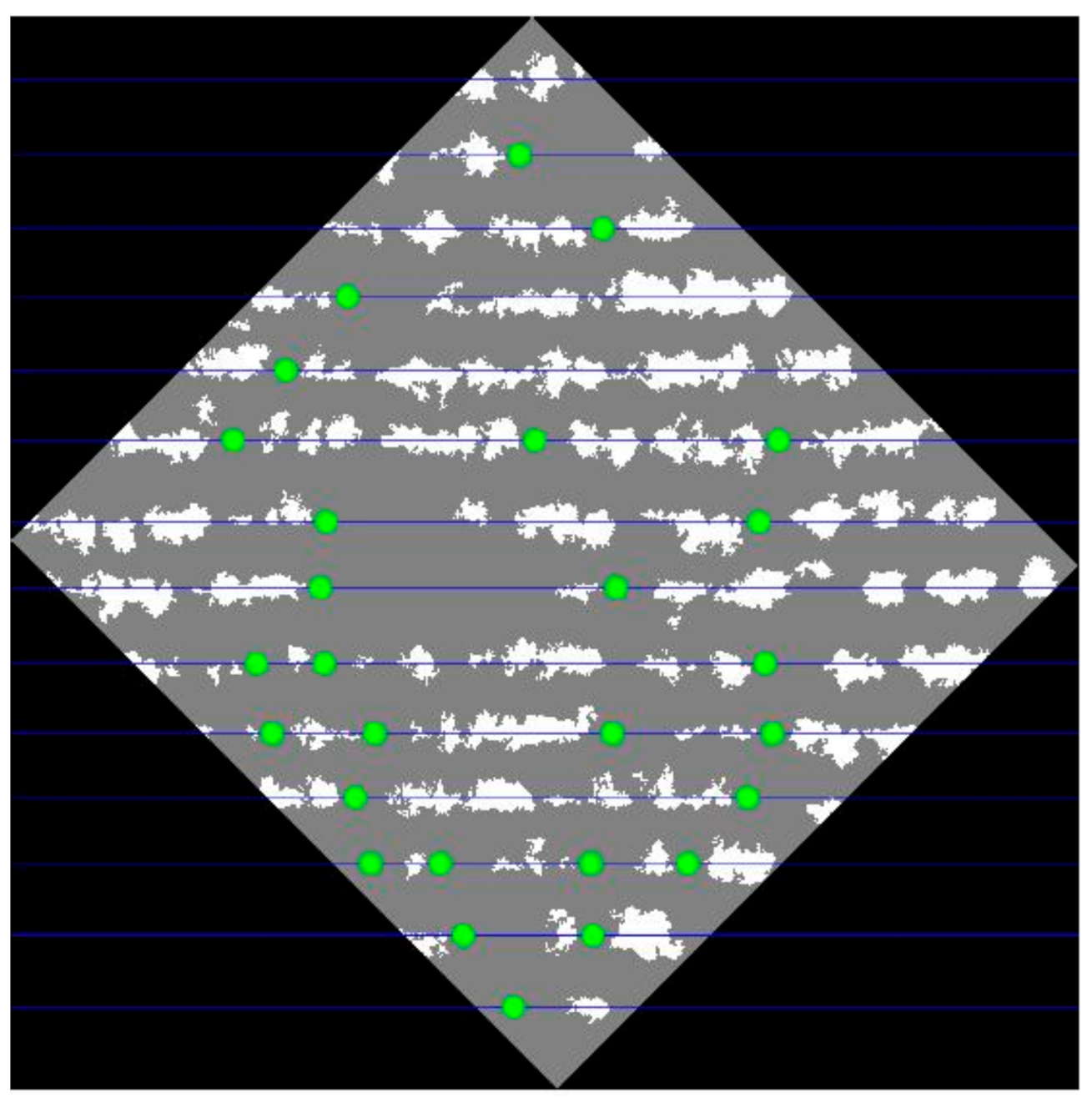
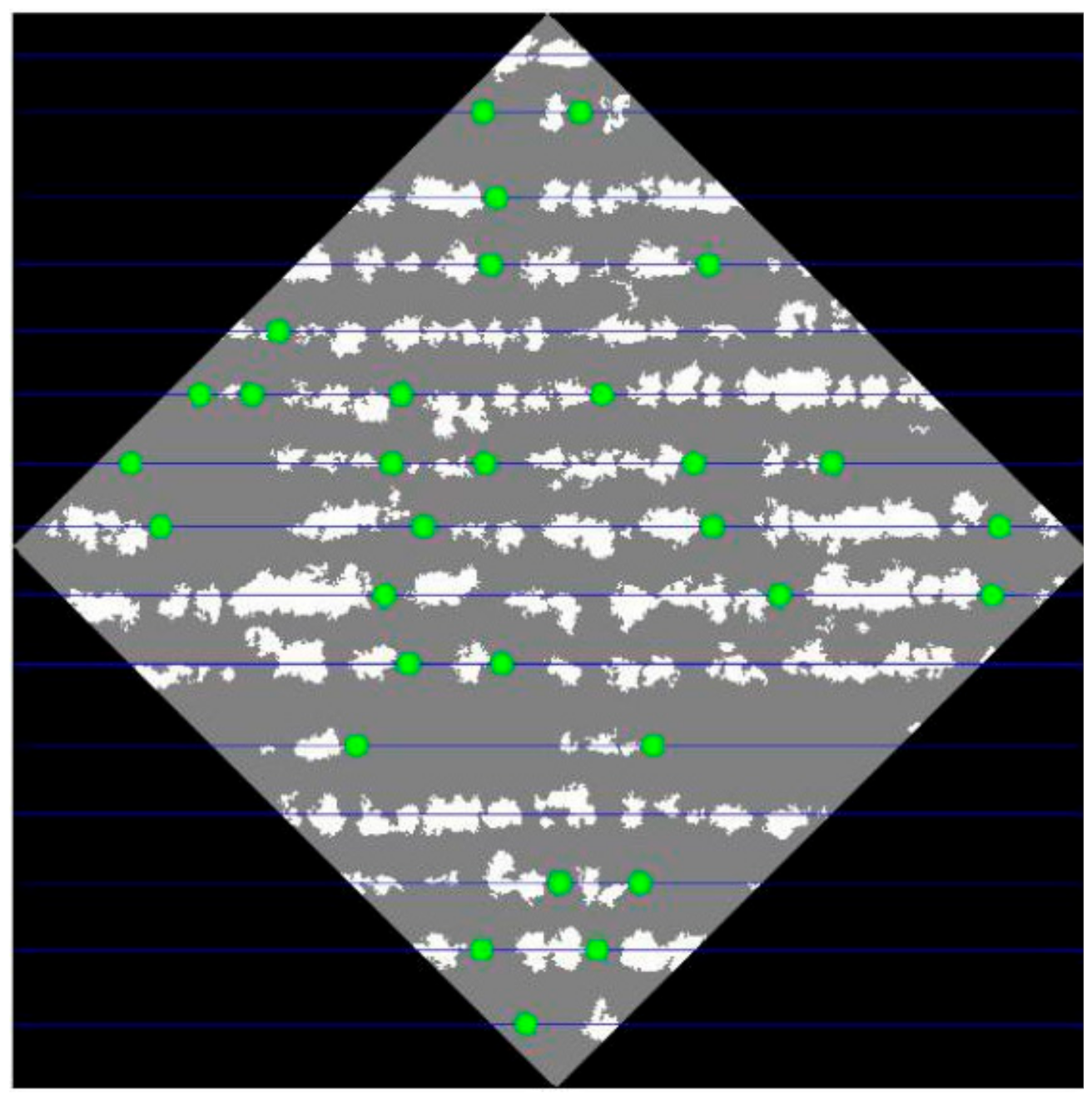
2.2.3. Detection of Failures and Interpretation of Their Relative Locations in Rows
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dash, J.; Pont, D.; Brownlie, R.; Dunningham, A.; Watt, M.S. Remote sensing for precision forestry. N. Z. J. For. 2016, 60, 15–24. [Google Scholar]
- Choudhry, H.; O’Kelly, G. Precision forestry: A revolution in the woods. McKinsey Insights 2018, 1. [Google Scholar]
- PR Newswire. US Global Precision Market Projected to Reach $6.1 Billion by 2024, at a CAGR of 9% during 2019–2024; PR Newswire: New York, NY, USA, 2019. [Google Scholar]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Dai, W.; Yang, B.; Dong, Z.; Shaker, A. A new method for 3D individual tree extraction using multispectral airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 144, 400–411. [Google Scholar] [CrossRef]
- Mu, Y.; Fujii, Y.; Takata, D.; Zheng, B.Y.; Noshita, K.; Honda, K.; Ninomiya, S.; Guo, W. Characterization of peach tree crown by using high-resolution images from an unmanned aerial vehicle. Hortic. Res. 2018, 5, 74. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peuhkurinen, J.; Tokola, T.; Plevak, K.; Sirparanta, S.; Kedrov, A.; Pyankov, S. Predicting tree diameter distributions from airborne laser scanning, SPOT 5 satellite, and field sample data in the Perm Region, Russia. Forests 2018, 9, 639. [Google Scholar] [CrossRef] [Green Version]
- Ganz, S.; Käber, Y.; Adler, P. Measuring tree height with remote sensing-a comparison of photogrammetric and LiDAR data with different field measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Yang, G.; Yang, H.; Zhu, Y.; Li, Z.; Lei, L.; Zhao, C. Extracting apple tree crown information from remote imagery using deep learning. Comput. Electron. Agr. 2020, 174, 105504. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Nsset, E.; Rka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Rem. Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Penner, M.; Woods, M.; Pitt, D.G. A Comparison of Airborne Laser Scanning and Image Point Cloud Derived Tree Size Class Distribution Models in Boreal Ontario. Forests 2015, 6, 4034–4054. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Varela, R.A.; de la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing Individual Tree Height Information Derived from Field Surveys, LiDAR and UAV-DAP for High-Value Timber Species in Northern Japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Ellis, E.C. High Spatial Resolution Three-Dimensional Mapping of Vegetation Spectral Dynamics Using Computer Vision. Rem. Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef] [Green Version]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tome, M.; Di´az-Varela, R.A.; Gonza´lez-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Barawid, O.C.; Mizushima, A.; Ishii, K.; Noguchi, N. Development of an autonomous navigation system using a two-dimensional laser scanner in an orchard application. Biosyst. Eng. 2007, 96, 139–149. [Google Scholar] [CrossRef]
- Jiang, G.; Wang, X.; Wang, Z. Wheat rows detection at the early growth stage based on Hough transform and vanishing point. Comput. Electron. Agric. 2016, 123, 211–223. [Google Scholar] [CrossRef]
- Montalvo, M.; Pajares, G.; Guerrero, J.M.; Romeo, J.; Guijarro, M.; Ribeiro, A.; Ruz, J.J.; Cruz, J.M. Automatic detection of crop rows in maize fields with high weeds pressure. Expert Syst. Appl. 2012, 39, 11889–11897. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.H.; Han, S.K.; Han, S.H.; Park, K.-H.; Kim, K.-S.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Jiang, G.; Wang, Z.; Liu, H. Automatic detection of crop rows based on multi-ROIs. Expert Syst. Appl. 2015, 42, 2429–2441. [Google Scholar] [CrossRef]
- Fontaine, V.; Crowe, T.G. Development of line-detection algorithms for local positioning in densely seeded crops. Can. Biosyst. Eng. 2006, 48, 19. [Google Scholar]
- Kise, M.; Zhang, Q. Development of a stereovision sensing system for 3D crop row structure mapping and tractor guidance. Biosyst. Eng. 2008, 101, 191–198. [Google Scholar] [CrossRef]
- Vidović, I.; Scitovski, R. Center-based clustering for line detection and application to crop rows detection. Comput. Electron. Agr. 2014, 109, 212–220. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Zhang, B. Automated robust crop-row detection in maize fields based on position clustering algorithm and shortest path method. Comput. Electron. Agr. 2018, 154, 165–175. [Google Scholar] [CrossRef]
- Vidović, I.; Cupec, R.; Hocenski, Ž. Crop Row Detection by Global Energy Minimization. Pattern Recogn. 2016, 55, 68–86. [Google Scholar] [CrossRef]
- Tenhunen, H.; Pahikkala, T.; Nevalainen, O.; Teuhola, J.; Mattila, H.; Tyystjärvi, E. Automatic detection of cereal rows by means of pattern recognition techniques. Comput. Electron. Agr. 2019, 162, 677–688. [Google Scholar] [CrossRef]
- García-Santillín, I.; Guerrero, J.M.; Montalvo, M.; Pajares, G. Curved and straight crop row detection by accumulation of green pixels from images in maize fields. Precis. Agric. 2018, 19, 18–41. [Google Scholar] [CrossRef]
- Oliveira, H.C.; Guizilini, V.C.; Nunes, I.P.; Souza, J.R. Failure detection in row crops from UAV images using morphological operators. IEEE Geosci. Remote Sens. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The estimation of crop emergence in potatoes by UAV RGB imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, J.; Xue, J.; Zhao, Q.; Wang, Q.; Chen, B.; Zhang, G.; Jiang, N. Extraction of cotton seedling growth information using UAV visible light remote sensing images. Trans. CSAE 2020, 36, 63–71. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sen. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Shirzadifar, A.; Maharlooei, M.; Bajwa, S.G.; Oduor, P.G.; Nowatzki, J.F. Mapping crop stand count and planting uniformity using high resolution imagery in a maize crop. Biosyst. Eng. 2020, 200, 377–390. [Google Scholar] [CrossRef]
- Kestur, R.; Angural, A.; Bashir, B.; Omkar, S.N.; Anand, G.; Meenavathi, M.B. Tree crown detection, delineation and counting in UAV remote sensed Images: A neural network based spectral–spatial Method. J. Indian Soc. Remote 2018, 46, 991–1004. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V. UAV-based high throughput phenotyping in citrus utilizing multispectral imaging and artificial intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef] [Green Version]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of citrus trees from unmanned aerial vehicle imagery using convolutional neural networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Proisy, C.; Descombes, X.; Maire, G.L.; Nouvellon, Y.; Stape, J.-L.; Viennois, G.; Zerubia, J.; Couteron, P. Mapping local density of young Eucalyptus plantations by individual tree detection in high spatial resolution satellite images. For. Ecol. Manage. 2013, 301, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep learning based oil palm tree detection and counting for high-resolution remote sensing images. Remote Sens. 2017, 9, 22. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Fu, H.; Li, W.; Wu, W.; Zhao, Y.I.; Dong, R.; Yu, L.E. Cross-regional oil palm tree counting and detection via a multi-level attention domain adaptation network. ISPRS J. Photogramm. Remote Sens. 2020, 167, 154–177. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, N.; Taylor, R.K.; Raun, W.R. Improvement of a ground-LiDAR-based corn plant population and spacing measurement system. Comput. Electron. Agr. 2015, 112, 92–101. [Google Scholar] [CrossRef]
- Tai, Y.W.; Ling, P.P.; Ting, K.C. Machine vision assisted robotic seedling transplanting. Trans. ASABE 1994, 37, 661–667. [Google Scholar] [CrossRef]
- Ryu, K.H.; Kim, G.; Han, J.S. Development of a robotic transplanter for bedding plants. J. Agr. Eng. Res. 2001, 78, 141–146. [Google Scholar] [CrossRef]
- Wang, C.; Guo, X.; Xiao, B.; Du, J.; Wu, S. Automatic measurement of numbers of maize seedlings based on mosaic imaging. Trans. CSAE 2014, 30, 148–153. [Google Scholar] [CrossRef]
- Molin, J.P.; Veiga, J.P.S. Spatial variability of sugarcane row gaps: Measurement and mapping. Ciência Agrotecnologia 2016, 40, 347–355. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 285–296. [Google Scholar] [CrossRef] [Green Version]
- MacQueen, J. Some Methods for Classification and Analysis of Multivariate Observation; University of California Press: Berkeley, CA, USA, 1967; pp. 281–297. [Google Scholar]
- Girish Kumar, D.; Raju, C.; Harish, G. Individual tree crowns computation using watershed segmentation in urban environment (Article). J. Green Eng. 2020, 10, 2644–2660. [Google Scholar]
- Huang, H.Y.; Li, X.; Chen, C.C. Individual tree crown detection and delineation from very high resolution UAV images based on bias field and Marker-Controlled Watershed segmentation algotithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2253–2262. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Eesources | Experimental Subjects | Information Obtained | Method |
|---|---|---|---|
| Unmanned aerial vehicle (UAV) images | Potato plants | Number | Random Forest [29] |
| cotton | Emergence rate, canopy coverage, and growth uniformity | Support Vector Machine (SVM) [30] | |
| Wheat | Number | SVM [31] | |
| maize | Number, coordinates, plant density, and within-row plant distances | “Bwlabel” ”regionprops” function in Matlab [32] | |
| Banana plants, mango trees, and coconut trees | Number | Extreme learning machine (ELM), Watershed algorithm [33] | |
| Citrus trees | Number | Convolutional Neural Networks (CNN) [34,35] | |
| Satellite image | Young Eucalyptus plantations | Local density | Marked point process [36] |
| oil palm tree | Number | CNN [37] | |
| palm tree | Number | Multi-level Attention Domain Adaptation Network [38] | |
| Lidar point cloud | corn plant | Number | Clustering algorithm [39] |
| Rn 1 (N 2) | Dn 3/m (PN 4) |
|---|---|
| 1(0) | No failure |
| 2(3) | 4.8(3) |
| 3(1) | 11.4(1) |
| 4(2) | 3.5(2) |
| 5(1) | 3.8(1) |
| 6(3) | 4.6(1) 17.6(1) 28(1) |
| 7(5) | 12.1(4) 30.6(1) |
| 8(8) | 10.6(7) 23.3(1) |
| 9(4) | 4.6(1) 7.6(1) 26.4(2) |
| 10(5) | 2.4(1) 6.7(1) 16.8(2) 23.7(1) |
| 11(3) | 3.2(1) 20.0(2) |
| 12(5) | 1.0(1) 4.1(1) 10.5(2) 14.6(1) |
| 13(3) | 2.0(2) 7.5(1) |
| 14(2) | 1.0(2) |
| Rn 1 (N 2) | Dn 3/m (PN 4) |
|---|---|
| 1(0) | No failure |
| 2(3) | 1.0(2) 5.3(1) |
| 3(1) | 5.4(1) |
| 4(3) | 8.1(1) 17.8(2) |
| 5(1) | 1.7(1) |
| 6(4) | 1.0(1) 3.4(1) 10.0(1) 18.9(1) |
| 7(12) | 1.0(4) 12.6(1) 16.7(1) 26.0(2) 32.0(4) |
| 8(7) | 5.1(4) 16.8(1) 29.6(1) 42.3(1) |
| 9(3) | 13.8(1) 31.3(1) 40.7(1) |
| 10(2) | 11.8(1) 15.9(1) |
| 11(13) | 5.9(6) 19.0(7) |
| 12(0) | No failure |
| 13(4) | 8.8(1) 12.3(3) |
| 14(2) | 1.8(1) 7.0(1) |
| 15(2) | 1.0(2) |
| Test Area | Number of Failures (Proposed Method) | Number of Failures (Visual Interpretation) | Overall Detection Rate |
|---|---|---|---|
| Test_1 | 45 | 49 | 91.8% |
| Test_2 | 57 | 60 | 95% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Wang, Y.; Sun, Z.; Xu, Q.; Liang, D. Failure Detection in Eucalyptus Plantation Based on UAV Images. Forests 2021, 12, 1250. https://doi.org/10.3390/f12091250
Zhao H, Wang Y, Sun Z, Xu Q, Liang D. Failure Detection in Eucalyptus Plantation Based on UAV Images. Forests. 2021; 12(9):1250. https://doi.org/10.3390/f12091250
Chicago/Turabian StyleZhao, Huanxin, Yixiang Wang, Zhibin Sun, Qi Xu, and Dan Liang. 2021. "Failure Detection in Eucalyptus Plantation Based on UAV Images" Forests 12, no. 9: 1250. https://doi.org/10.3390/f12091250
APA StyleZhao, H., Wang, Y., Sun, Z., Xu, Q., & Liang, D. (2021). Failure Detection in Eucalyptus Plantation Based on UAV Images. Forests, 12(9), 1250. https://doi.org/10.3390/f12091250