
Estimating Near-Surface Soil Hydraulic Properties through Sensor-Based Soil Infiltrability Measurements and Inverse Modeling

Abstract
:1. Introduction
2. Materials and Methods
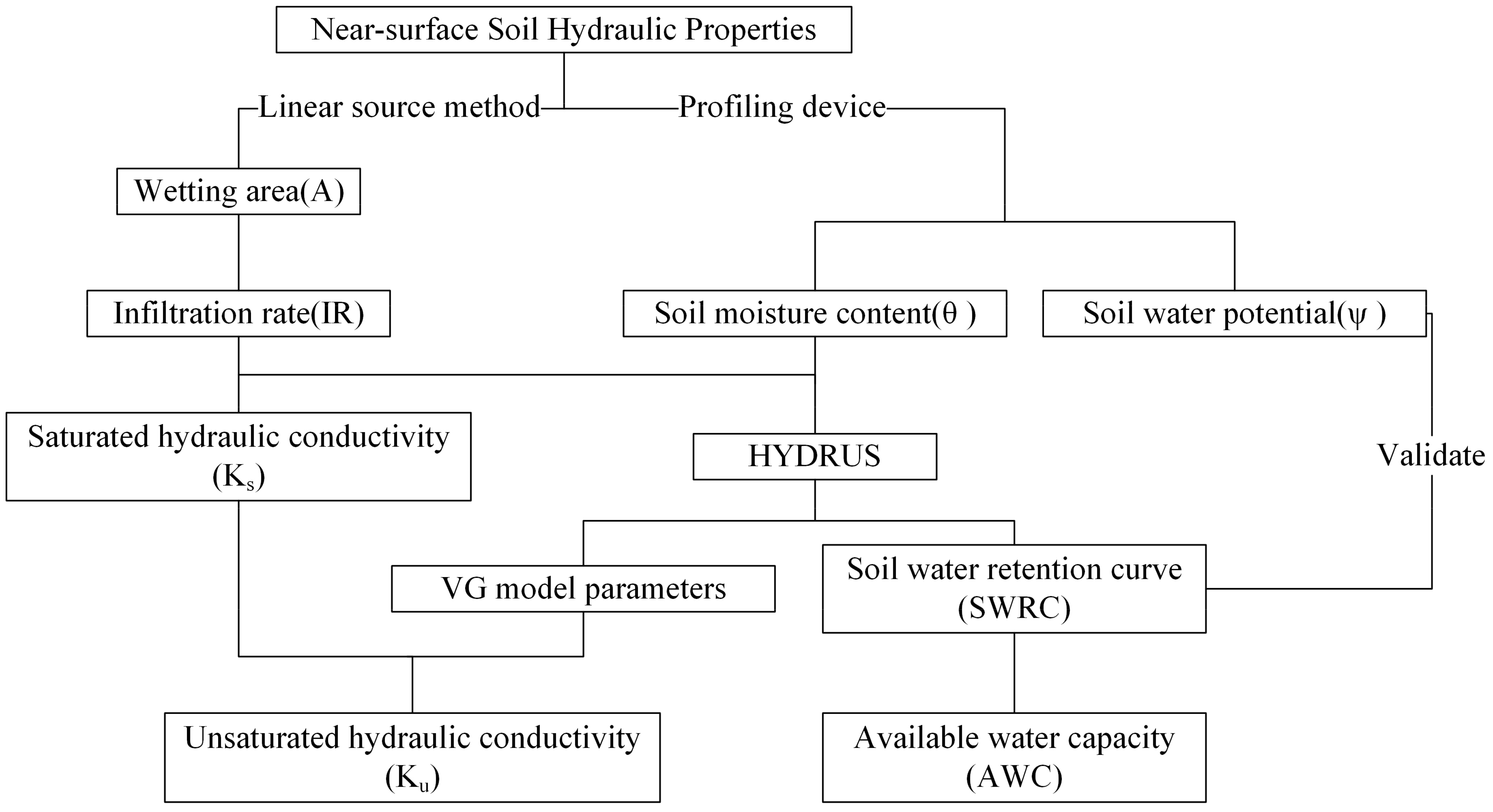
2.1. Mathematical Models for the Estimation of the Near-Surface Soil Hydraulic Properties
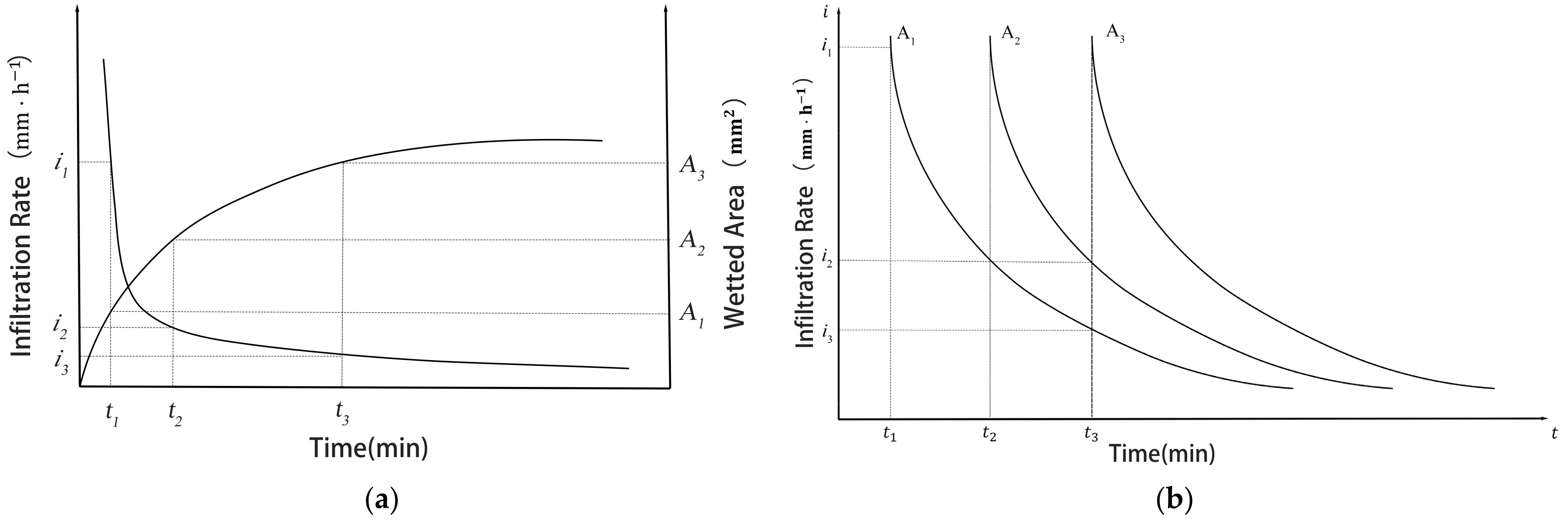
2.1.1. Linear Source Inflow Method for Estimating Soil Infiltration Rate and Saturated Soil Hydraulic Conductivity
2.1.2. Inverse Estimation of the Soil Water Retention Curve Using HYDRUS-2D
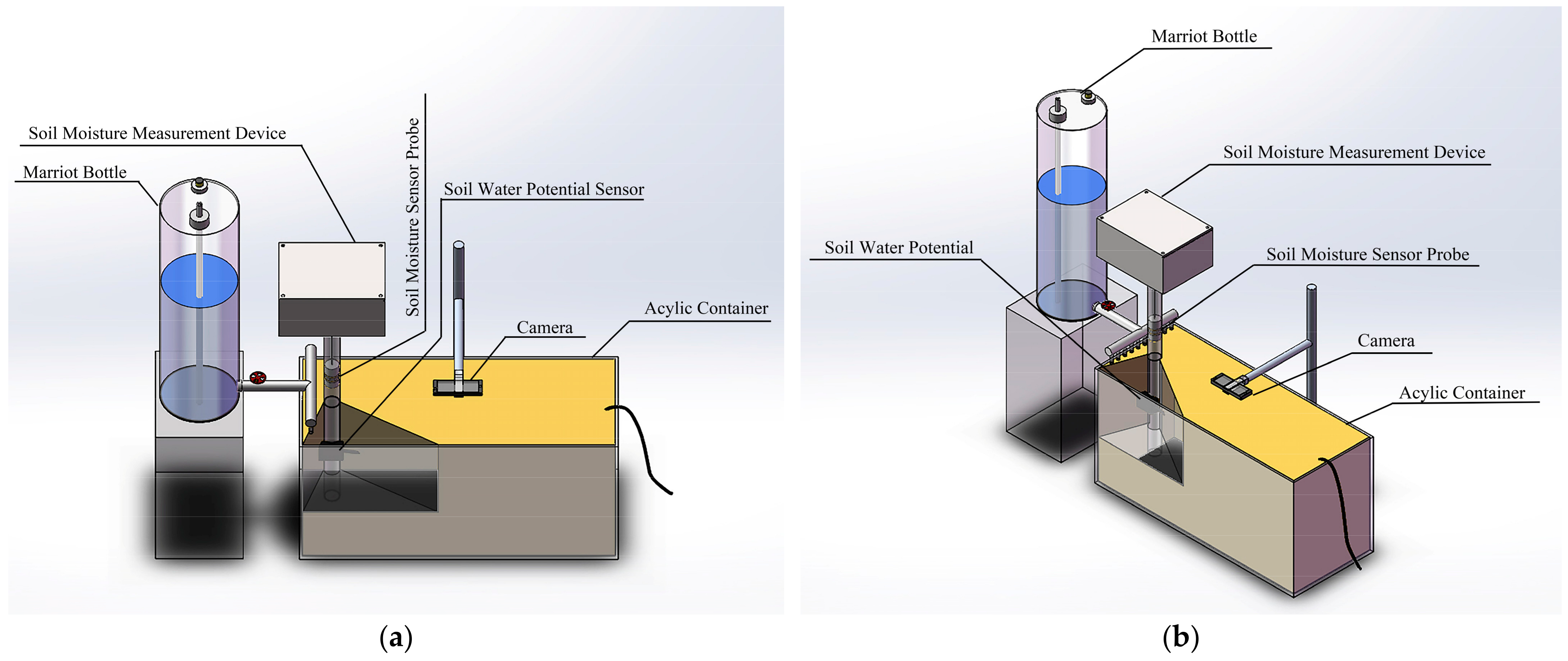
2.2. System Design
2.3. Experimental Preparation and Procedure
2.3.1. Experimental Materials
2.3.2. Experimental Procedure
2.4. Method for Validation and Error Analysis
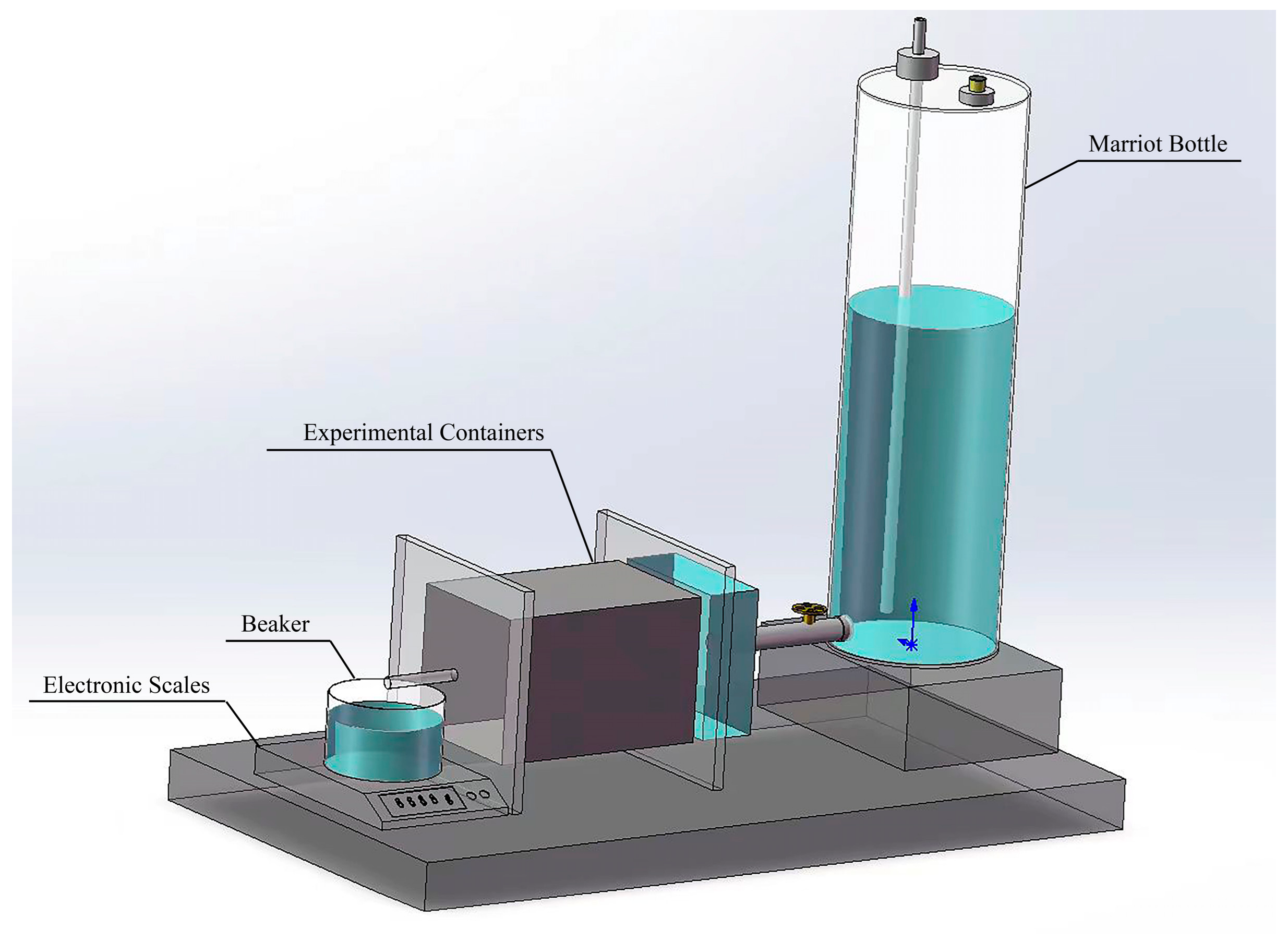
2.4.1. Validation of the Saturated Hydraulic Conductivity Using the CHM
2.4.2. Comparison of the SWRC and the Measured Results
3. Results
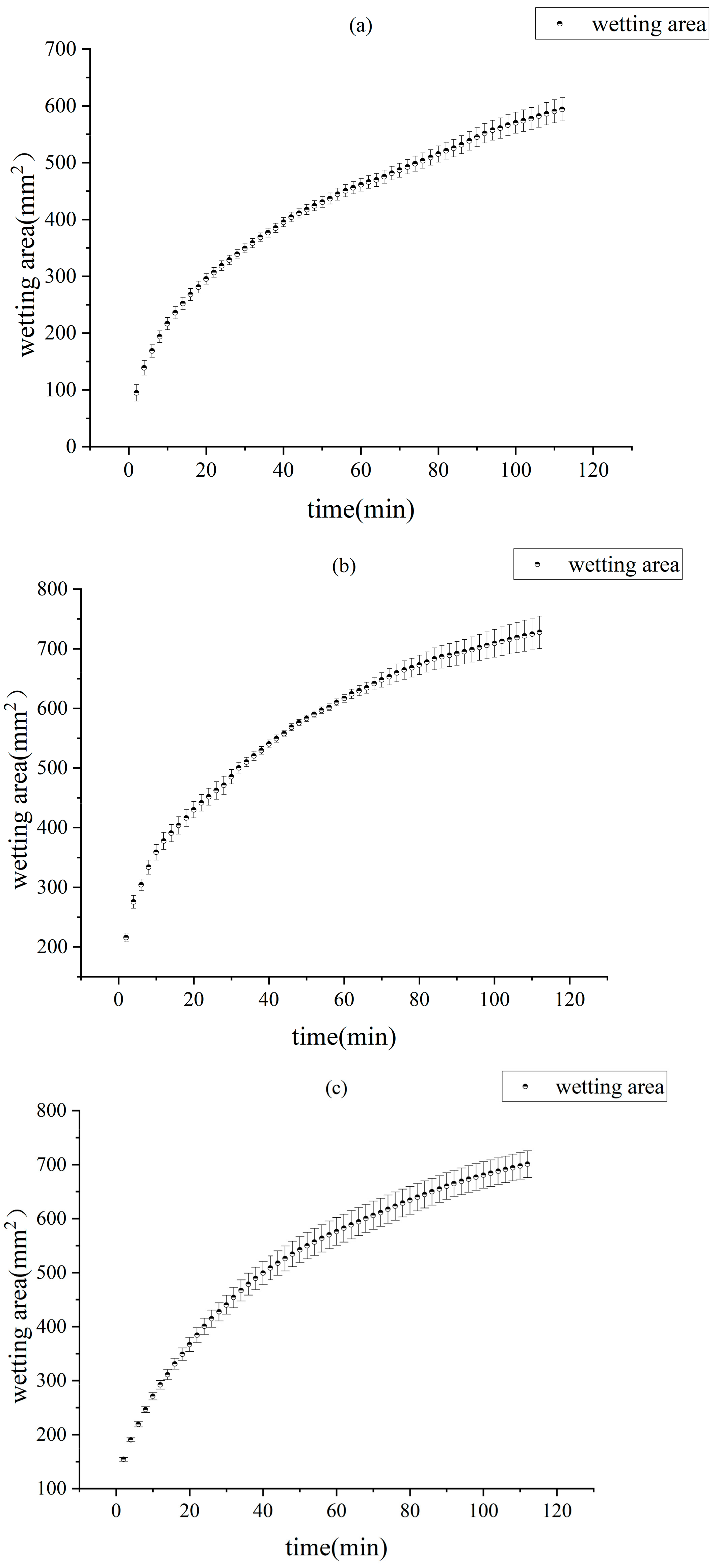
3.1. Estimation Results of the Soil Wetting Area Using Image Processing
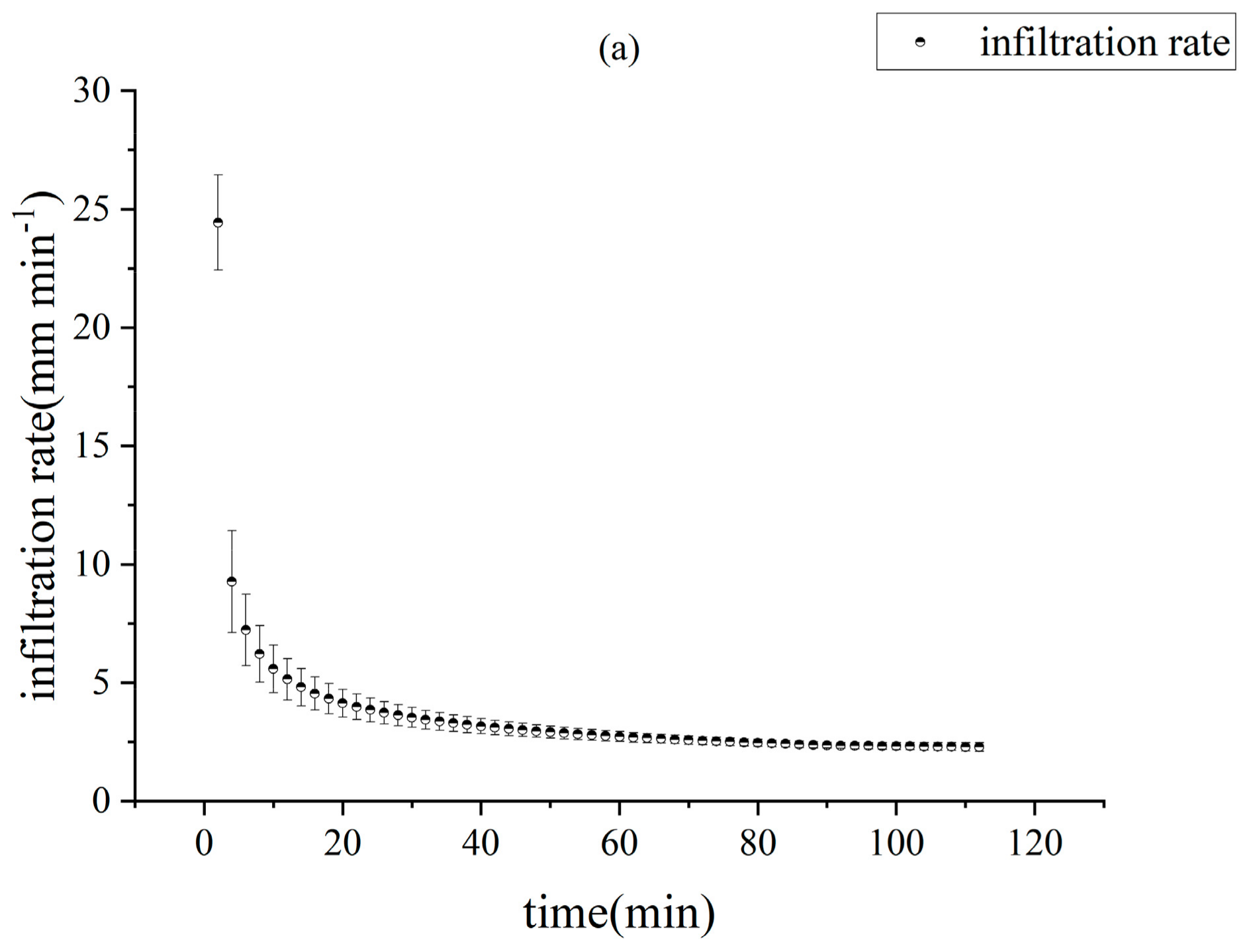
3.2. Estimation Results of Ks Using the Estimated Stable IR
3.3. Estimation Results of the SWRC, AWC, and Ku
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Virano-Riquelme, V.; Feger, K.-H.; Julich, S. Variation in Hydraulic Properties of Forest Soils in Temperate Climate Zones. Forests 2022, 13, 1850. [Google Scholar] [CrossRef]
- Archer, N.A.L.; Otten, W.; Schmidt, S.; Bengough, A.G.; Shah, N.; Bonell, M. Rainfall infiltration and soil hydrological characteristics below ancient forest, planted Forest and Grassland in a Temperate Northern Climate. Ecohydrology 2016, 9, 585–600. [Google Scholar] [CrossRef]
- Julich, S.; Kreiselmeier, J.; Scheibler, S.; Petzold, R.; Schwärzel, K.; Feger, K.H. Hydraulic properties of forest soils with stagnic conditions. Forests 2021, 12, 1113. [Google Scholar] [CrossRef]
- Archer, N.A.L.; Bonell, M.; MacDonald, A.M.; Coles, N. A Constant Head Well Permeameter Formula Comparison: Its Significance in the Estimation of Field-Saturated Hydraulic Conductivity in Heterogeneous Shallow Soils. Hydrol. Res. 2014, 45, 788–805. [Google Scholar] [CrossRef]
- Schindler, U. A rapid method for measuring the hydraulic conductivity in cylinder core samples from unsaturated soil. Arch. Agron. Soil Sci. 1980, 24, 1–7. [Google Scholar]
- Schindler, U.; Durner, W.; von Unold, G.; Müller, L. Evaporation method for measuring unsaturated hydraulic properties of soils: Extending the measurement range. Soil Sci. Soc. Am. J. 2010, 74, 1071–1083. [Google Scholar] [CrossRef]
- Schwen, A.; Zimmermann, M.; Bodner, G. Vertical variations of soil hydraulic properties within two soil profiles and its relevance for soil water simulations. J. Hydrol. 2014, 516, 169–181. [Google Scholar] [CrossRef]
- Peters, A.; Durner, W. Simplified evaporation method for determining soil hydraulic properties. J. Hydrol. 2008, 356, 147–162. [Google Scholar] [CrossRef]
- Peters, A.; Iden, S.C.; Durner, W. Revisiting the simplified evaporation method: Identification of hydraulic functions considering vapor, film and corner flow. J. Hydrol. 2015, 527, 531–542. [Google Scholar] [CrossRef]
- Tian, Z.; Kojima, Y.; Heitman, J.L.; Horton, R.; Ren, T. Advances in thermo-time domain reflectometry technique: Measuring ice content in partially frozen soils. Soil Sci. Soc. Am. J. 2020, 84, 1519–1526. [Google Scholar] [CrossRef]
- Xu, Q.; Zhu, Y.; Xiang, Y.; Yu, S.; Wang, Z.; Yan, X.; Du, T.; Cheng, Q. A novel frequency-domain integrated sensor for in-situ estimating unsaturated soil hydraulic conductivity. J. Hydrol. 2022, 610, 127939. [Google Scholar] [CrossRef]
- Burdine, N. Relative permeability calculations from pore size distribution data. J. Petrol. Technol. 1953, 5, 71–78. [Google Scholar] [CrossRef]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef]
- van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Šimůnek, J.; Angulo-Jaramillo, R.H.; Schaap, M.G.; Vandervaere, J.P.; van Genuchten, M.T. Using an inverse method to estimate hydraulic properties of crusted soils from tension-disc infiltrometer data. Geoderma 1988, 86, 61–81. [Google Scholar] [CrossRef]
- Šimůnek, J.; van Genuchten, M.T.; Wendroth, O. Parameter Estimation Analysis of the Evaporation Method for Determining Soil Hydraulic Properties. Soil Sci. Soc. Am. J. 1998, 62, 894–905. [Google Scholar] [CrossRef]
- Di Prima, S.; Lassabatère, L.; Bagarello, V.; Iovino, M.; Angulo-Jaramillo, R. Testing a new automated single ring infiltrometer for Beerkan infiltration experiments. Geoderma 2016, 262, 20–34. [Google Scholar] [CrossRef]
- Campbell, G.S. A simple method for determining unsaturated conductivity from moisture retention data. Soil Sci. 1974, 117, 311–314. [Google Scholar] [CrossRef]
- Reynolds, W.D.; Bowman, B.T.; Brunke, R.R.; Drury, C.F.; Tan, C.S. Comparison of tension infiltrometer, pressure infiltrometer, and soil core estimates of saturated hydraulic conductivity. Soil Sci. Soc. Am. J. 2000, 64, 478–484. [Google Scholar] [CrossRef]
- Reynolds, W.D.; Elrick, D.E. In-situ measurement of field-saturated hydraulic conductivity, sorptivity and the α-parameter using the Guelph permeameter. Soil Sci. 1985, 140, 292–302. [Google Scholar] [CrossRef]
- Klute, A.; Dirksen, C. Hydraulic conductivity and diffusivity: Laboratory methods. Methods of Soil Analysis: Part 1 Physical and Mineralogical. Methods 1986, 5, 687–734. [Google Scholar]
- Elrick, D.E.; Angulo-Jaramillo, R.; Fallow, D.J.; Reynolds, W.D.; Parkin, G.W. Infiltration under constant head and falling head conditions. Environmental mechanics: Water, mass and energy transfer in the biosphere. Geophys. Monogr. 2002, 129, 47–53. [Google Scholar]
- Rezaei, M.; Seuntjens, P.; Shahidi, R.; Joris, I.; Boënne, W.; Al-Barri, B.; Cornelis, W. The relevance of in-situ and laboratory characterization of sandy soil hydraulic properties for soil water simulations. J. Hydrol. 2016, 534, 251–265. [Google Scholar] [CrossRef]
- Bagarello, V.; Baiamonte, G.; Caia, C. Variability of near-surface saturated hydraulic conductivity for the clay soils of a small Sicilian basin. Geoderma 2019, 340, 133–145. [Google Scholar] [CrossRef]
- Mavroulidou, M.; Zhang, X.; Cabarcapa, Z. A study of the laboratory measurement of the soil water retention curve. In Proceedings of the 11th International Conference on Environmental Science and Technology 2009, Chania, Greece, 3–5 September 2009. [Google Scholar]
- Solone, R.; Bittelli, M.; Tomei, F.; Morari, F. Errors in water retention curves determined with pressure plates: Effects on the soil water balance. J. Hydrol. 2012, 470–471, 65–74. [Google Scholar] [CrossRef]
- Adnane, B.; Wilfred, O.; Ho-Chul, S.; Hannah, V.C.; Jane, R.; Aziz, S.; Mohamed, E.G. Evaluation of pedotransfer functions to estimate some of soil hydraulic characteristics in North Africa: A case study from Morocco. Environ. Sci. 2023, 11, 1090688. [Google Scholar]
- Šimůnek, J.; Van Genuchten, M.T.; Šejna, M. The HYDRUS Software Package for Simulating Two- and Three-Dimensional Movement of Water, Heat, and Multiple Solutes in Variably-Saturated Media; Technical Manual, Version 1.0; PC Progress: Prague, Czech Republic, 2006; Volume 1, p. 241. [Google Scholar]
- Sixtine, C.; Yves, C.; Jean-Noël, A.; Liliane, B.; Valérie, P.; Lionel, A. Estimation of soil water retention in conservation agriculture using published and new pedotransfer functions. Soil Tillage Res. 2021, 209, 104967. [Google Scholar]
- Sara, E.A.; Sofia, I.M.; Cristina, P.C.; Carlos, A.B. Effect of data availability and pedotransfer estimates on water flow modelling in wildfire-affected soils. J. Hydrol. 2023, 617, 128919. [Google Scholar]
- Assouline, S.; Or, D. The concept of field capacity revisited: Defining intrinsic static and dynamic criteria for soil internal drainage dynamics. Water Resour. Res. 2014, 50, 4787–4802. [Google Scholar] [CrossRef]
- Liu, H.; Rezanezhad, F.; Lennartz, B. Impact of land management on available water capacity and water storage of peatlands. Geoderma 2022, 406, 115521. [Google Scholar] [CrossRef]
- Veihmeyer, F.J.; Hendrickson, A.H. Methods of measuring field capacity and permanent wilting point. Soil Sci. 1949, 68, 75–94. [Google Scholar] [CrossRef]
- Costantini, E.A.C.; Pellegrini, S.; Bucelli, P.; Barbetti, R.; Campagnolo, S.; Storchi, P.; Magini, S.; Perria, R. Mapping suitability for Sangiovese wine by means of delta C-13 and geophysical sensors in soils with moderate salinity. Eur. J. Agron. 2010, 33, 208–217. [Google Scholar] [CrossRef]
- Ibrahimi, K.; Alghamdi, A.G. Available water capacity of sandy soils as affected by biochar application: A meta-analysis. CATENA 2022, 214, 106281. [Google Scholar] [CrossRef]
- Mao, L.L.; Lei, T.W.; Li, X.; Liu, H.; Huang, X.F.; Zhang, Y.N. A linear source method for soil infiltrability measurement and model representations. J. Hydrol. 2008, 353, 49–58. [Google Scholar] [CrossRef]
- Cui, Z.; Wu, G.L.; Huang, Z.; Liu, Y. Fine roots determine soil infiltration potential than soil water content in semi-arid grassland soils. J. Hydrol. 2019, 578, 124023. [Google Scholar] [CrossRef]
- Yu, S.; Xu, Q.; Cheng, X.; Xiang, Y.; Zhu, Y.; Yan, X.; Wang, Z.; Du, T.; Wu, X.; Cheng, Q. In-situ determination of soil water retention curves in heterogeneous soil profiles with a novel dielectric tube sensor for measuring soil matric potential and water content. J. Hydrol. 2021, 603, 126829. [Google Scholar] [CrossRef]
- Rawls, W.J.; Gish, T.J.; Brakensiek, D.L. Estimating soil water retention from soil physical properties and characteristics. Adv. Soil Sci. 1991, 16, 213–234. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Samples | Relations | R2 | |
|---|---|---|---|
| Humus soil | Cork oak stand | 0.9898 | |
| Oleander stand | 0.9986 | ||
| Sandy loam | Farmland | 0.9887 | |
| Soil Texture | Depth (cm) | Initial Moisture Content (%) | Sand (%) | Silt (%) | Clay (%) | Organic Matter Content (%) | Bulk Density (g cm3) | Porosity (%) | |
|---|---|---|---|---|---|---|---|---|---|
| Humus soil | Cork oak stand | 0–10 | 1.42 | / | / | / | 8.35 | 1.18 | 55.47 |
| Oleander stand | 22.93 | 14.95 | 1.071 | 59.58 | |||||
| Sandy loam | Farmland | 2.83 | 39.9 | 46.6 | 13.5 | 1.85 | 1.33 | 50.19 | |
| Soil Samples | ) | R2 | |
|---|---|---|---|
| Humus soil | Cork oak stand | 0.9938 | |
| Oleander stand | 0.9947 | ||
| Sandy loam | Farmland | 0.9988 | |
| Soil Texture | Constant Head Standard (mm min−1) | Linear Source Inflow (mm min−1) | Relative Error (%) | |
|---|---|---|---|---|
| Humus soil | Cork oak stand | 24.41 ± 1.53 | 23.40 ± 1.21 | 4.14 |
| Oleander stand | 24.26 ± 0.37 | 23.86 ± 1.83 | 1.64 | |
| Sandy loam | Farmland | 23.81 ± 0.10 | 22.99 ± 2.26 | 3.42 |
| Soil Texture | NRMSE of Soil Water Content (θ) | NRMSE of SWRC | Averaged NRMSE of SWRC | ||
|---|---|---|---|---|---|
| Humus soil | Cork oak stand | First | 0.1958 | 0.1489 | 0.1724 |
| Second | 0.1947 | 0.1597 | |||
| Third | 0.2019 | 0.2086 | |||
| Oleander stand | First | 0.1216 | 0.1209 | 0.1454 | |
| Second | 0.1471 | 0.1286 | |||
| Third | 0.1688 | 0.1867 | |||
| Sandy loam | Farmland | First | 0.1337 | 0.0672 | 0.0606 |
| Second | 0.1552 | 0.0726 | |||
| Third | 0.1542 | 0.0421 | |||
| Soil Texture | Field Capacity (FC) | Permanent Wilting Point (PWP) | Available Water Capacity (AWC) | Average of AWC | ||
|---|---|---|---|---|---|---|
| Humus soil | Cork oak stand | First | 0.0227 | 0.016 | 0.0067 | 0.0058 |
| Second | 0.0166 | 0.015 | 0.0016 | |||
| Third | 0.0221 | 0.013 | 0.0091 | |||
| Oleander stand | First | 0.4031 | 0.0676 | 0.3355 | 0.307 | |
| Second | 0.3572 | 0.0534 | 0.3038 | |||
| Third | 0.3274 | 0.0457 | 0.2817 | |||
| Sandy loam | Farmland | First | 0.3062 | 0.0422 | 0.264 | 0.221 |
| Second | 0.3062 | 0.113 | 0.1932 | |||
| Third | 0.314 | 0.1083 | 0.2057 | |||
| Soil Texture | θr | θs | α | n | Ks (mm min−1) | l | |
|---|---|---|---|---|---|---|---|
| Humus soil | Cork oak stand | 0.0147 | 0.460 | 0.0986 | 5.0757 | 23.40 | 0.5 |
| Oleander stand | 0.0200 | 0.486 | 0.0357 | 1.6496 | 23.86 | 0.5 | |
| Sandy loam | Farmland | 0.0126 | 0.340 | 0.0177 | 1.5127 | 22.99 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Zhou, W.; Zhang, Y.; Zuo, C.; Cheng, Q. Estimating Near-Surface Soil Hydraulic Properties through Sensor-Based Soil Infiltrability Measurements and Inverse Modeling. Forests 2024, 15, 569. https://doi.org/10.3390/f15030569
Yan X, Zhou W, Zhang Y, Zuo C, Cheng Q. Estimating Near-Surface Soil Hydraulic Properties through Sensor-Based Soil Infiltrability Measurements and Inverse Modeling. Forests. 2024; 15(3):569. https://doi.org/10.3390/f15030569
Chicago/Turabian StyleYan, Xiaofei, Wen Zhou, Yiguan Zhang, Chong Zuo, and Qiang Cheng. 2024. "Estimating Near-Surface Soil Hydraulic Properties through Sensor-Based Soil Infiltrability Measurements and Inverse Modeling" Forests 15, no. 3: 569. https://doi.org/10.3390/f15030569
APA StyleYan, X., Zhou, W., Zhang, Y., Zuo, C., & Cheng, Q. (2024). Estimating Near-Surface Soil Hydraulic Properties through Sensor-Based Soil Infiltrability Measurements and Inverse Modeling. Forests, 15(3), 569. https://doi.org/10.3390/f15030569