
A New Skid Trail Pattern Design for Farm Tractors Using Linear Programing and Geographical Information Systems


Abstract
:1. Introduction
2. Materials and Methods
2.1. Specifications of the Optimum Skidding Model
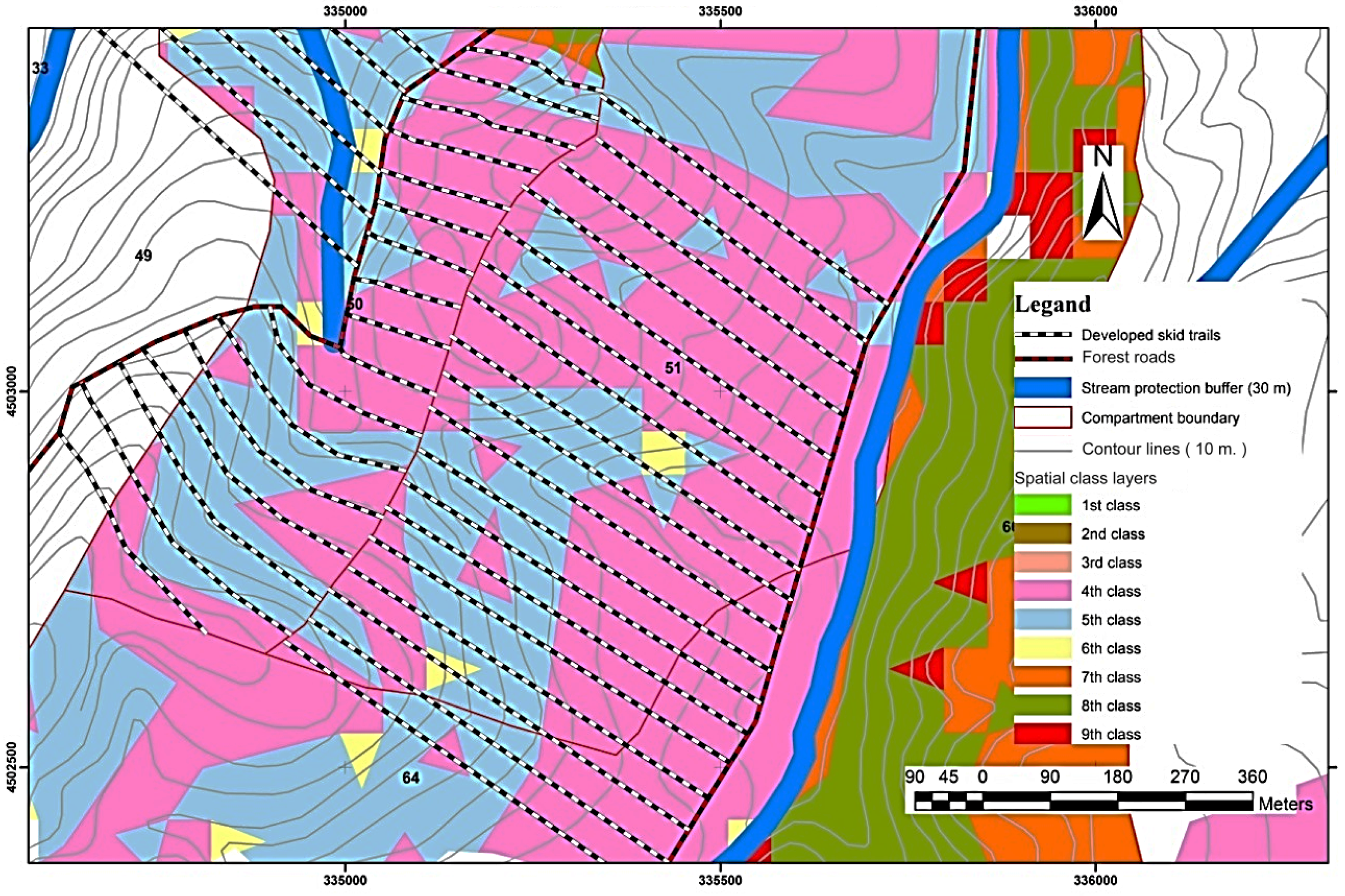
2.2. Skid Trail Pattern Design
- Skid trails width should be 1 m wider than the skidding vehicles.
- As farm tractors were used in this study, skid trails should be planned in the areas where the uphill gradient is below 33%.
- Skid trails should be connected to forest roads using the shortest routes and at angles of 35°–45°. The connection angle can vary according to the topological features, conditions of the forest roads and wood length.
- Skid patterns should be designed to realize the transportation of wood in a downhill direction. The distance between the trails should be equivalent to two tree lengths (50 m).
- Open culverts should be constructed on the skid trail at every 50 m interval at an angle of 45° across the trails axis where skid trails exceed 100 m.
2.3. Testing the Designed Skid Trail Pattern in Field Operations
3. Results and Discussion
3.1. Existing Skidding Operations
3.2. Optimum Skidding Model
3.3. The Optimization Results of the Skid Trail Patterns
3.4. Results of Testing the DSTP in the Field Study
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Spinelli, R.; Magagnotti, N.; Visser, R. Productivity Models for Cable Yarding in Alpine Forests. Eur. J. For. Eng. 2015, 1, 9–15. [Google Scholar]
- Magagnotti, N.; Spinelli, R. Financial and energy cost of low-impact wood extraction in environmentally sensitive areas. Ecol. Eng. 2011, 37, 601–606. [Google Scholar] [CrossRef]
- Buckley, D.S.; Crow, T.R.; Nauertz, E.A.; Schulz, K.E. Influence of skid trails and haul roads on understory plant richness and composition in managed forest landscapes in upper Michigan, USA. For. Ecol. Manag. 2003, 175, 509–520. [Google Scholar] [CrossRef]
- Messina, M.G.; Schoenholtz, S.H.; Lowe, M.W.; Wang, Z.; Gunter, D.K.; Londo, A.J. Initial responses of woody vegetation, water quality, and soils to harvesting intensity in a Texas Bottom and hardwood ecosystem. For. Ecol. Manag. 1997, 90, 201–215. [Google Scholar] [CrossRef]
- Arocena, J.M. Cations in solution from forest soils subjected to forest flor removal and compaction treatments. For. Ecol. Manag. 2000, 133, 71–80. [Google Scholar] [CrossRef]
- Marshall, V.G. Impacts of forest harvesting on biological processes in Northern forest soils. For. Ecol. Manag. 2000, 133, 43–60. [Google Scholar] [CrossRef]
- Krueger, W. Effects of future crop tree flagging and skid trail planning on conventional diameter-limit logging in a Bolivian tropical forest. For. Ecol. Manag. 2004, 188, 381–393. [Google Scholar] [CrossRef]
- Godefroid, S.; Koedam, N. The impact of forest paths upon adjacent vegetation: Effects of the paths surfacing material on the species compaction and soil compaction. Biol. Conserv. 2004, 119, 405–419. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Busato, P.; Berruto, R. Benefits from optimal route planning based on B-patterns. Biosyst. Eng. 2013, 115, 389–395. [Google Scholar] [CrossRef]
- Solgi, A.; Najafi, A.; Ezzati, S.; Ferencik, M. Assessment of ground-based skidding impacts on the horizontally rate and extent of soil disturbance along the margin of the skid trail. Ann. For. Sci. 2016, 73, 513–522. [Google Scholar] [CrossRef]
- Vinson, J.A. Soil Erosion and Modeling Following Closure Best Management Practices for Bladed Skid Trails in the Ridge and Valley Region. Ph.D. Thesis, Virginia Tech University, Blacksburg, VA, USA, 2016. [Google Scholar]
- Garland, J.J. Designated Skid Trails Minimize Soil Compaction; Forest Research Laboratory, School of Forestry, Oregon State University, Extension Service: Corvallis, OR, USA, 1983. [Google Scholar]
- Picman, D.; Pentek, T.; Nevecerel, H.; Papa, I.; Lepoglavec, K. Possibilities of application of relative openness in secondary forest opening of slope forests in Croatia. Croat. J. For. Eng. 2011, 32, 427–430. [Google Scholar]
- Froehlich, H.A.; Aulerich, D.E.; Curtis, R. Designing Skid Trail Systems to Reduce Soil Impacts from Tractive Logging Machines; Forest Research Laboratory Oregon State University: Corvallis, OR, USA, 1981. [Google Scholar]
- Heinimann, H.R. A computer model to differentiate skidder and cable-yarder based road network concepts on steep slopes. J. For. Res. 1998, 3, 1–9. [Google Scholar] [CrossRef]
- Ghaffarian, M.R.; Sobhani, H. Optimum road spacing of ground based skidding operations in Nowshahr. Iran. Casp. J. Env. Sci. 2008, 6, 105–112. [Google Scholar]
- Kooshki, M.; Hayati, E.; Rafatnia, N.; Ahmadi, M.T. Using GIS to evaluate and design skid trails for forest products. Taiwan J. For. Sci. 2012, 27, 117–124. [Google Scholar]
- Sterenczak, K.; Moskalik, T. Use of LIDAR-based digital terrain model and single tree segmentation data for optimal forest skid trail network. iForest 2014, 8, 661–667. [Google Scholar] [CrossRef]
- Phua, M.H.; Minowa, M.A. GIS-based multi-criteria decision making approach to forest conservation planning at a landscape scale: A case study in the Kinabalu Area, Sabah, Malaysia. Landsc. Urban Plan. 2005, 71, 207–222. [Google Scholar] [CrossRef]
- Sidle, R.C.; Sasaki, S.; Otsuki, M.; Noguchi, S.; Nik, A.R. Sediment pathways in a tropical forest: Effects of logging roads and skid trails. Hydrol. Process. 2004, 18, 703–720. [Google Scholar] [CrossRef]
- Contreras, M.A.; Chung, W. A modeling approach to estimating skidding costs of individual trees for thinning operations. West. J. Appl. For. 2011, 26, 133–146. [Google Scholar]
- Tucek, J.; Pacola, E. Algorithms for skidding distance modelling on a raster digital terrain model. J. For. Eng. 1999, 10, 67–79. [Google Scholar]
- Parsakhoo, A.; Mostafa, M. Road network analysis for timber transportation from a harvesting site to mills (Case study: Gorgan county–Iran). J. For. Sci. 2015, 61, 520–525. [Google Scholar] [CrossRef]
- Vopěnka, P.; Kašpar, J.; Marušák, R. GIS tool for optimization of forest harvest-scheduling. Comput. Electr. Agric. 2015, 113, 254–259. [Google Scholar] [CrossRef]
- Segura, M.; Ray, D.; Maroto, C. Decision support systems for forest management: A comparative analysis and assessment. Comput. Electr. Agric. 2014, 101, 55–67. [Google Scholar] [CrossRef]
- Najafi, A.; Sobhani, H.; Saeed, A.; Makhdom, M. Planning and assessment of alternative forest road and skidding networks. Croat. J. For. Eng. 2008, 29, 63–73. [Google Scholar]
- Ezzati, S.; Najafi, A.; Yaghini, M.; Hashemi, A.A.; Bettinger, P. An optimization model to solve skidding problem in steep slope terrain. J. For. Econ. 2015, 21, 250–268. [Google Scholar] [CrossRef]
- Lotfalian, M.; Khosrozadeh, S.; Hosseini, S.A.; Kazemi, M.; Zare, N. Determination of forest skid trail density in Caspian forests, Iran. J. For. Sci. 2016, 62, 80–87. [Google Scholar] [CrossRef]
- Borchert, H.; Huber, C.; Göttlein, A.; Kremer, J. Nutrient Concentration on Skid Trails under Brush-Mats–Is a Redistribution of Nutrients Possible? Croat. J. For. Eng. 2015, 36, 243–252. [Google Scholar]
- Turk, Y.; Gumus, S. Log skidding with farm tractors. In Proceedings of the 43th International Symposium on Forestry Mechanisation: “Forest Engineering: Meeting the Needs of the Society and the Environment”, Padova, Italy, 11–14 July 2010.
- Akay, A.E.; Erdas, O.; Sessions, J. Determining Productivity of Mechanized Harvesting Machines. J. Appl. Sci. 2004, 4, 100–105. [Google Scholar]
- Zecic, Z.; Marence, J. Mathematical models for optimization of group work in harvesting operation. Croat. J. For. Eng. 2005, 26, 29–37. [Google Scholar]
- Demir, M.; Makineci, E.; Yilmaz, E. Harvesting impact on herbaceous understory, forest floor and top soil properties on skid road in a beech (Fagus orientalis Lipsky) stand. J. Environ. Biol. 2007, 28, 427–432. [Google Scholar] [PubMed]
- Bavaghar, M.P.; Sobhani, H.; Feghhi, J.; Darvishsefat, A.A.; Marvi Mohajer, M.R. Comprehensive Productivity Models for Tracked and Wheeled Skidders in the Hyrcanian Forests of Iran. Res. J. For. 2010, 4, 65–71. [Google Scholar] [CrossRef]
- Makineci, E.; Demir, M.; Yilmaz, E. Long Term Harvesting Effects on Skid Road in a Fir (Abiesbornmulleriana Mattf.) Plantation Forest. Build. Environ. 2007, 42, 1538–1543. [Google Scholar] [CrossRef]
- Rönnqvist, M. Optimization in Forestry. Math Program. 2003, 97, 267–284. [Google Scholar]
- Eker, M.; Acar, H.H. Development of annual operational planning model for timber harvesting. SDU J. Nat. Appl. Sci. 2006, 10, 235–248. [Google Scholar]
- Frisk, M.; Göthe-Lundgren, M.; Jörnsten, K.; Rönnqvist, M. Cost allocation in collaborative forest transportation. Eur. J. Oper. Res. 2010, 205, 448–458. [Google Scholar] [CrossRef]
- Brais, S.; Camire, C. Soil compaction induced by careful logging in the claybelt region of northwestern Quebec (Canada). Can. J. Soil Sci. 1998, 78, 197–206. [Google Scholar] [CrossRef]
- Johns, J.S.; Barreto, P.; Uhl, C. Logging damage during planned and unplanned logging operations in the Eastern Amazon. For. Ecol. Manag. 1996, 89, 59–77. [Google Scholar] [CrossRef]
- Acar, H.H. An investigation on the extraction from compartment by tractors at the mountainous region. Turk. J. Agric. For. 1997, 21, 299–306. [Google Scholar]



{kind=link}
{kind=link}
| Optimum Positional Class | Floor Condition | Floor Class | Slope Group (%) |
|---|---|---|---|
| 1st class | Not Slippery | Humic Soil | 0–11 |
| 2nd class | Not Slippery | Humic Soil | 12–22 |
| 3rd class | Not Slippery | Humic Soil | 23–33 |
| 4th class | Not Slippery | Thin Granular | 0–11 |
| 5th class | Not Slippery | Thin Granular | 12–22 |
| 6th class | Not Slippery | Thin Granular | 23–33 |
| 7th class | Not Slippery | Big Granular | 0–11 |
| 8th class | Not Slippery | Big Granular | 12–22 |
| 9th class | Not Slippery | Big Granular | 23–33 |
| Density of the Skid Trail Patterns in Hectares | ||||
|---|---|---|---|---|
| Section No. | Existing Trails | Branching Pattern | Parallel Pattern | Direct Pattern |
| 48 | 209 m/ha | 197 m/ha | 199 m/ha | 192 m/ha |
| 522 m2/ha | 494 m2/ha | 498 m2/ha | 480 m2/ha | |
| 51 | 353 m/ha | 186 m/ha | 180 m/ha | 181 m/ha |
| 883 m2/ha | 465 m2/ha | 450 m2/ha | 454 m2/ha | |
| Average | 281 m/ha | 192 m/ha | 190 m/ha | 187 m/ha |
| 703 m2/ha | 480 m2/ha | 474 m2/ha | 467 m2/ha | |
| Skidding productivity for the Skid Trail Patterns in the optimum GIS model (skidding distance of 100 m) | ||||
| 48 | 23.10 m3/h | 61.02 m3/h | 59.67 m3/h | 61.71 m3/h |
| 51 | 34.32 m3/h | 64.67 m3/h | 65.06 m3/h | 65.45 m3/h |
| Average | 28.71 m3/h | 62.85 m3/h | 52.37 m3/h | 63.58 m3/h |
| Skid Trails Patterns | Sub-Compartment No. | Trail Length (m) | Total Log (Piece) | Total Volume (m3) | Total Number of Cycle | Average Cycle Time (s) | Total Time (s) |
|---|---|---|---|---|---|---|---|
| DSTP Test in the field | 50-A | 242 | 156 | 116 | 39 | 658 | 25,662 |
| 51-A | 366 | 48 | 37 | 12 | 981 | 11,772 | |
| 423 | 96 | 72 | 24 | 1163 | 27,912 | ||
| 63-D | 258 | 172 | 130 | 43 | 730 | 31,390 | |
| General total | 118 | 3532 | 96,736 | ||||
| Current situation | 50-A | 242 | 156 | 116 | 75 | 479 | 35,925 |
| 51-A | 366 | 48 | 37 | 23 | 725 | 16,675 | |
| 423 | 96 | 72 | 46 | 838 | 38,548 | ||
| 63-D | 258 | 172 | 130 | 83 | 511 | 42,413 | |
| General total | 227 | 2553 | 133,561 | ||||
| Productivity and Environmental Effects | Direct Skid Trail Pattern (Field Test Values) | Existing Skid Trails |
|---|---|---|
| Average Productivity (100 m) | 38.99 m3/h | 29.49 m3/h |
| Average Productivity (250 m) | 15.60 m3/h | 11.78 m3/h |
| Average Productivity (389 m) (existing skid trails lengths) | 10.02 m3/h | 7.58 m3/h |
| Sapling collapse, ha | 4203 number/ha | 6327 number /ha |
| Soil loss, ha | 35.53 m3/ha (89,180 ton/ha) | 53.39 m3/ha (134,009 ton/ha) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gumus, S.; Turk, Y. A New Skid Trail Pattern Design for Farm Tractors Using Linear Programing and Geographical Information Systems. Forests 2016, 7, 306. https://doi.org/10.3390/f7120306
Gumus S, Turk Y. A New Skid Trail Pattern Design for Farm Tractors Using Linear Programing and Geographical Information Systems. Forests. 2016; 7(12):306. https://doi.org/10.3390/f7120306
Chicago/Turabian StyleGumus, Selcuk, and Yilmaz Turk. 2016. "A New Skid Trail Pattern Design for Farm Tractors Using Linear Programing and Geographical Information Systems" Forests 7, no. 12: 306. https://doi.org/10.3390/f7120306
APA StyleGumus, S., & Turk, Y. (2016). A New Skid Trail Pattern Design for Farm Tractors Using Linear Programing and Geographical Information Systems. Forests, 7(12), 306. https://doi.org/10.3390/f7120306