Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest


 ,
, 

 and
and
Abstract
:
1. Introduction
2. Methods
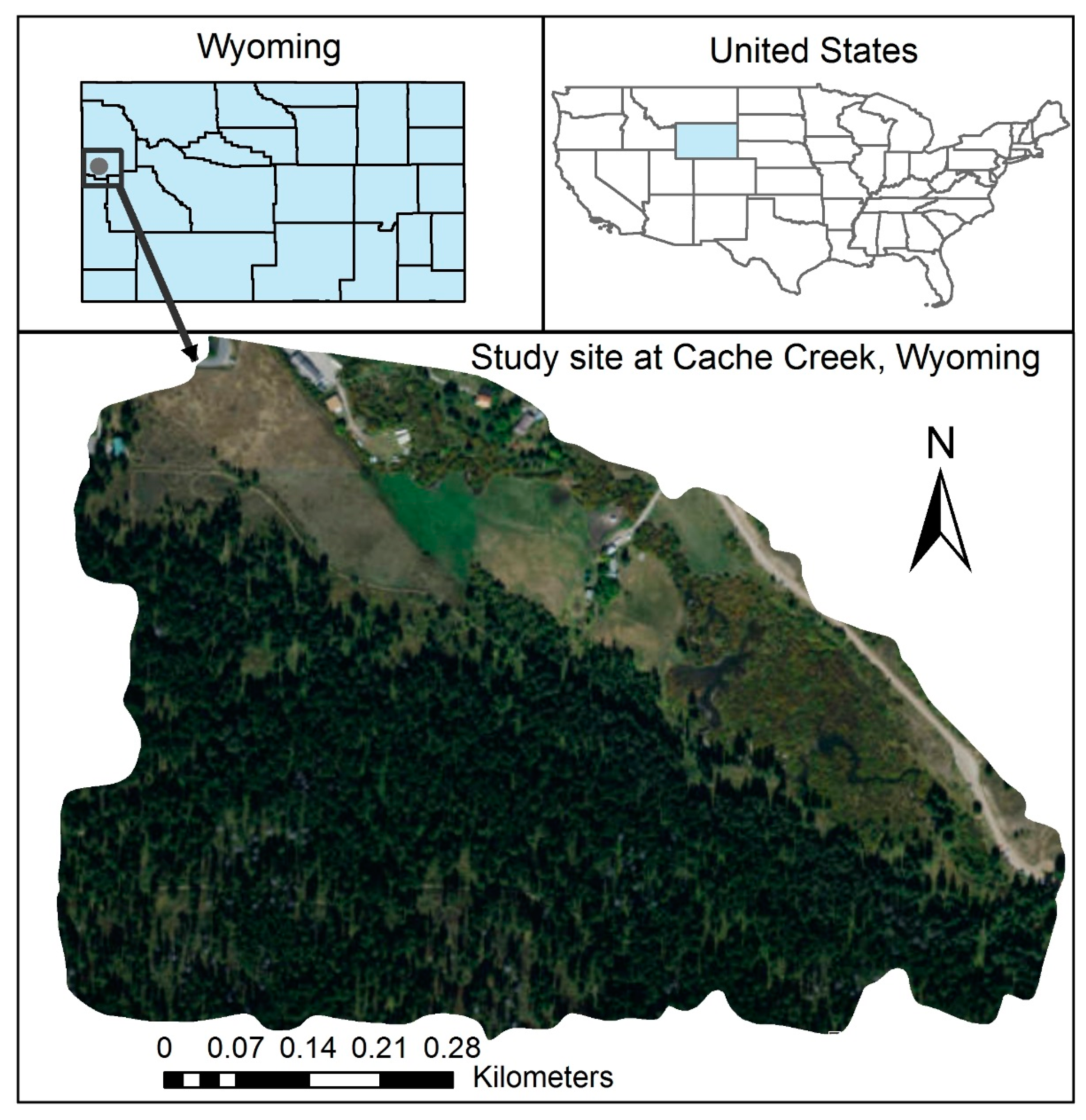
2.1. Study Area Description
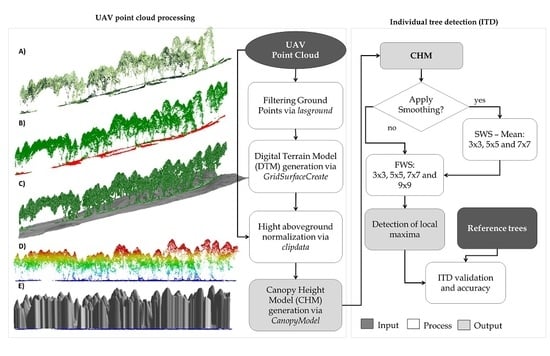
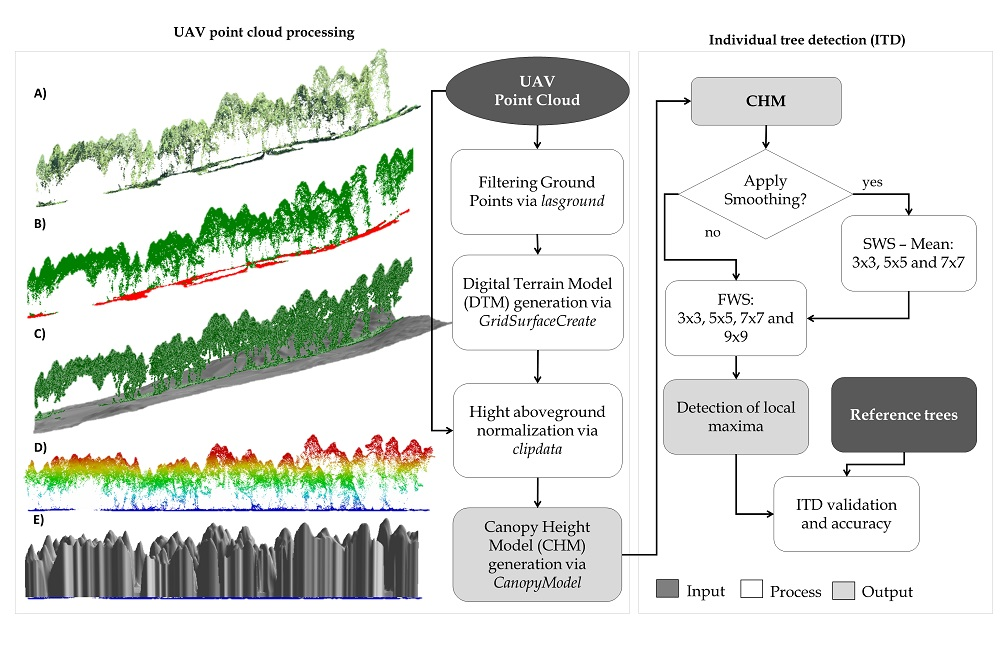
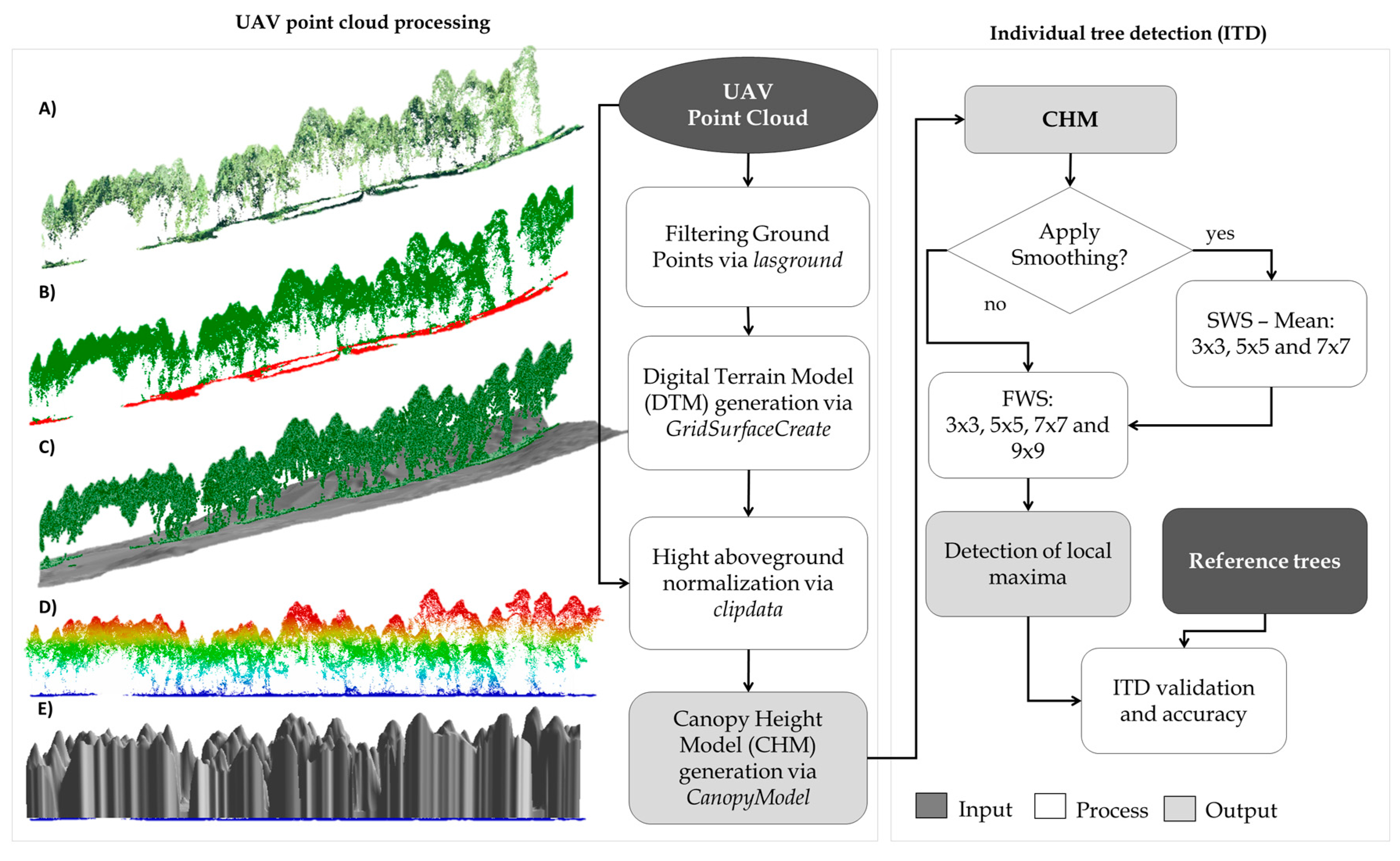
2.2. Data Acquisition and Processing
2.3. Individual Tree Identification (ITD)
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigul, N.S. 3D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles. PLoS ONE 2015, 10, e0137765. [Google Scholar] [CrossRef] [PubMed]
- Cubbage, F.; Roise, J.; Sutherland, R. The Proposed Sale of the Hofmann Forest: A Case Study in Natural Resource Policy. In Forest Economics and Policy in a Changing Environment: How Market, Policy, and Climate Transformations Affect Forests—Proceedings of the 2016 Meeting of the International Society of Forest Resource Economics; e-Gen. Tech. Rep. SRS-218; Department of Agriculture Forest Service: Asheville, NC, USA, 2016; p. 81. [Google Scholar]
- Kwak, D.A.; Lee, W.K.; Lee, J.H.; Biging, G.S.; Gong, P. Detection of individual trees and estimation of tree height using LiDAR data. J. For. Res. 2007, 12, 425–434. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a savanna woodland using small footprint lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Strigul, N.; Pristinski, D.; Purves, D.; Dushoff, J.; Pacala, S. Scaling from trees to forests: Tractable macroscopic equations for forest dynamics. Ecol. Monogr. 2008, 78, 523–545. [Google Scholar] [CrossRef]
- Strigul, N. Individual-Based Models and Scaling Methods for Ecological Forestry: Implications of Tree Phenotypic Plasticity; INTECH Open Access Publisher: Rijeka, Croatia, 2012. [Google Scholar]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Gardner, T.A.; Barlow, J.; Araujo, I.S.; Ávila-Pires, T.C.; Bonaldo, A.B.; Costa, J.E.; Esposito, M.C.; Ferreira, L.V.; Hawes, J.; Hernandez, M.I.M.; et al. The cost-effectiveness of biodiversity surveys in tropical forests. Ecol. Lett. 2008, 11, 139–150. [Google Scholar] [CrossRef] [PubMed]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Crowther, T.W.; Glick, H.B.; Covey, K.R.; Bettigole, C.; Maynard, D.S.; Thomas, S.M.; Smith, J.R.; Hintler, G.; Duguid, M.C.; Amatulli, G.; et al. Mapping tree density at a global scale. Nature 2015, 525, 201–205. [Google Scholar] [CrossRef] [PubMed]
- Khorram, S.; van der Wiele, C.F.; Koch, F.H.; Nelson, S.A.; Potts, M.D. Remote Sensing: Past and Present. In Principles of Applied Remote Sensing; Springer International Publishing: Cham, Switzerland, 2016; pp. 1–20. [Google Scholar]
- Roise, J.P.; Harnish, K.; Mohan, M.; Scolforo, H.; Chung, J.; Kanieski, B.; Catts, G.P.; McCarter, J.B.; Posse, J.; Shen, T. Valuation and production possibilities on a working forest using multi-objective programming, Woodstock, timber NPV, and carbon storage and sequestration. Scand. J. For. Res. 2016, 31, 674–680. [Google Scholar] [CrossRef]
- Waser, L.T.; Baltsavias, E.; Ecker, K.; Eisenbeiss, H.; Ginzler, C.; Küchler, M.; Thee, P.; Zhang, L. High-resolution digital surface models (DSMs) for modelling fractional shrub/tree cover in a mire environment. Int. J. Remote Sens. 2008, 29, 1261–1276. [Google Scholar] [CrossRef]
- Wallerman, J.; Bohlin, J.; Fransson, J.E. Forest height estimation using semi-individual tree detection in multi-spectral 3D aerial DMC data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Hudak, A.T.; Haren, A.T.; Crookston, N.L.; Liebermann, R.J.; Ohmann, J.L. Imputing forest structure attributes from stand inventory and remotely sensed data in western Oregon, USA. For. Sci. 2014, 60, 253–269. [Google Scholar] [CrossRef]
- Hansen, E.H.; Gobakken, T.; Bollandsås, O.M.; Zahabu, E.; Næsset, E. Modeling aboveground biomass in dense tropical submontane rainforest using airborne laser scanner data. Remote Sens. 2015, 7, 788–807. [Google Scholar] [CrossRef] [Green Version]
- Gholizadeh, A.; Mišurec, J.; Kopačková, V.; Mielke, C.; Rogass, C. Assessment of Red-Edge Position Extraction Techniques: A Case Study for Norway Spruce Forests Using HyMap and Simulated Sentinel-2 Data. Forests 2016, 7, 226. [Google Scholar] [CrossRef]
- Zhang, Z.; Kazakova, A.; Moskal, L.M.; Styers, D.M. Object-based tree species classification in urban ecosystems using LiDAR and hyperspectral data. Forests 2016, 7, 122. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å. Identifying species of individual trees using airborne laser scanner. Remote Sens. Environ. 2004, 90, 415–423. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Jaafar, W.S.W.M.; Mohan, M.; Garcia, M.; Ferraz, A.; Cardil, A.; Saatchi, S. Predicting Stem Total and Assortment Volumes in an Industrial Pinus taeda L. Forest Plantation Using Airborne Laser Scanning Data and Random Forest. Forests 2017, 8, 254. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Lim, Y.S.; La, P.H.; Park, J.S.; Lee, M.H.; Pyeon, M.W.; Kim, J.I. Calculation of Tree Height and Canopy Crown from Drone Images Using Segmentation. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2015, 33, 605–614. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J.M. High-throughput 3-D monitoring of agricultural-tree plantations with unmanned aerial vehicle (UAV) technology. PLoS ONE 2015, 10, e0130479. [Google Scholar] [CrossRef] [PubMed]
- Kattenborn, T.; Sperlich, M.; Bataua, K.; Koch, B. Automatic Single Tree Detection in Plantations using UAV-based Photogrammetric Point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 139. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from Motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- Miller, E.; Dandois, J.P.; Detto, M.; Hall, J.S. Drones as a Tool for Monoculture Plantation Assessment in the Steepland Tropics. Forests 2017, 8, 168. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Hung, C.; Bryson, M.; Sukkarieh, S. Multi-class predictive template for tree crown detection. ISPRS J. Photogramm. Remote Sens. 2012, 68, 170–183. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Gong, P.; Sheng, Y.; Biging, G.S. 3D model-based tree measurement from high-resolution aerial imagery. Photogramm. Eng. Remote Sens. 2002, 68, 1203–1212. [Google Scholar]
- Song, C. Estimating tree crown size with spatial information of high resolution optical remotely sensed imagery. Int. J. Remote Sens. 2007, 28, 3305–3322. [Google Scholar] [CrossRef]
- Sumnall, M.J.; Hill, R.A.; Hinsley, S.A. Comparison of small-footprint discrete return and full waveform airborne LiDAR data for estimating multiple forest variables. Remote Sens. Environ. 2016, 173, 214–223. [Google Scholar] [CrossRef]
- Puliti, S.; Gobakken, T.; Ørka, H.O.; Næsset, E. Assessing 3D point clouds from aerial photographs for species-specific forest inventories. Scand. J. For. Res. 2017, 32, 68–79. [Google Scholar] [CrossRef]
- Brandtberg, T.; Walter, F. Automated delineation of individual tree crowns in high spatial resolution aerial images by multiple-scale analysis. Mach. Vis. Appl. 1998, 11, 64–73. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual tree-crown delineation and treetop detection in high-spatial-resolution aerial imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Strecha, C.; Von Hansen, W.; Van Gool, L.; Fua, P.; Thoennessen, U. On benchmarking camera calibration and multi-view stereo for high resolution imagery. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric techniques on ultra-light UAV imagery. In Proceedings of the UAV-g 2011-Unmanned Aerial Vehicle in Geomatics, Zurich, Switzerland, 14–16 September 2011. No. EPFL-CONF-168806. [Google Scholar]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3d modeling—Current status and future perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, C22. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-based photogrammetric point clouds—Tree stem mapping in open stands in comparison to terrestrial laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 141–146. [Google Scholar] [CrossRef]
- Haala, N.; Hastedt, H.; Wolf, K.; Ressl, C.; Baltrusch, S. Digital photogrammetric camera evaluation–generation of digital elevation models. Photogramm.-Fernerkund.-Geoinf. 2010, 2010, 99–115. [Google Scholar] [CrossRef] [PubMed]
- Baltsavias, E.; Gruen, A.; Eisenbeiss, H.; Zhang, L.; Waser, L.T. High-quality image matching and automated generation of 3D tree models. Int. J. Remote Sens. 2008, 29, 1243–1259. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surface Proc. Landforms 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Hernández-Clemente, R.; Navarro-Cerrillo, R.M.; Ramírez, F.J.R.; Hornero, A.; Zarco-Tejada, P.J. A novel methodology to estimate single-tree biophysical parameters from 3D digital imagery compared to aerial laser scanner data. Remote Sens. 2014, 6, 11627–11648. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef]
- Kwak, D.A.; Lee, W.K.; Lee, J.H. Predicting forest stand characteristics with detection of individual tree. In Proceedings of the MAPPS/ASPRS 2006 Fall Conference, San Antonio, TX, USA, 6–10 November 2006. [Google Scholar]
- Larsen, M.; Eriksson, M.; Descombes, X.; Perrin, G.; Brandtberg, T.; Gougeon, F.A. Comparison of six individual tree crown detection algorithms evaluated under varying forest conditions. Int. J. Remote Sens. 2011, 32, 5827–5852. [Google Scholar] [CrossRef]
- Lee, J.H.; Biging, G.S.; Fisher, J.B. An Individual Tree-Based Automated Registration of Aerial Images to Lidar Data in a Forested Area. Photogramm. Eng. Remote Sens. 2016, 82, 699–710. [Google Scholar] [CrossRef]
- Descombes, X.; Pechersky, E. Tree Crown Extraction Using a Three State Markov Random Field. Ph.D. Thesis, INRIA, Rocquencourt, France, 2006. [Google Scholar]
- Perrin, G.; Descombes, X.; Zerubia, J. A Non-Bayesian Model for Tree Crown Extraction Using Marked Point Processes; INRIA: Rocquencourt, France, 2006. [Google Scholar]
- Gougeon, F.A. Automatic individual tree crown delineation using a valley-following algorithm and rule-based system. In Proceedings of the International Forum on Automated Interpretation of High Spatial Resolution Digital Imagery for Forestry, Victoria, BC, Canada, 10–12 February 1998; pp. 11–23. [Google Scholar]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria; Available online: http://www.R-project.org (accessed on 15 October 2015).
- AgiSoft, L.L.C. PhotoScan Professional Edition v.1.0.3. Available online: www.agisoft.ru (accessed on 3 October 2015).
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Lucieer, A.; Turner, D.; King, D.H.; Robinson, S.A. Using an Unmanned Aerial Vehicle (UAV) to capture micro-topography of Antarctic moss beds. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 53–62. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Isenburg, M. LAStools—Efficient Tools for LiDAR Processing. Available online: lastools.org (accessed on 3 October 2015).
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A. rLiDAR: An R Package for Reading, Processing and Visualizing LiDAR (Light Detection and Ranging) Data, Version 0.1. Available online: http://cran.rproject. org/web/packages/rLiDAR/index.html (accessed on 15 October 2015).
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local maximum filtering for the extraction of tree locations and basal area from high spatial resolution imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In Proceedings of the European Conference on Information Retrieval, Compostela, Spain, 21–23 March 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond accuracy, F-score and ROC: A family of discriminant measures for performance evaluation. In Proceedings of the Australasian Joint Conference on Artificial Intelligence, Auckland, New Zealand, 1–5 December 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1015–1021. [Google Scholar]
- Puttock, A.K.; Cunliffe, A.M.; Anderson, K.; Brazier, R.E. Aerial photography collected with a multirotor drone reveals impact of Eurasian beaver reintroduction on ecosystem structure 1. J. Unmanned Veh. Syst. 2015, 3, 123–130. [Google Scholar] [CrossRef]
- Koh, L.; Wich, S. Dawn of drone ecology: Low-cost autonomous aerial vehicles for conservation. Trop. Conserv. Sci. 2012, 5, 121–132. [Google Scholar] [CrossRef] [Green Version]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Felderhof, L.; Gillieson, D. Near-infrared imagery from unmanned aerial systems and satellites can be used to specify fertilizer application rates in tree crops. Can. J. Remote Sens. 2012, 37, 376–386. [Google Scholar] [CrossRef]
- Wallace, L.; Watson, C.; Lucieer, A. Detecting pruning of individual stems using airborne laser scanning data captured from an unmanned aerial vehicle. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 76–85. [Google Scholar] [CrossRef]
- Lindberg, E.; Hollaus, M. Comparison of methods for estimation of stem volume, stem number and basal area from airborne laser scanning data in a hemi-boreal forest. Remote Sens. 2012, 4, 1004–1023. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.; Gessler, P.E.; Hudak, A.T.; Vierling, L.A.; Evans, J.S. The influence of conifer forest canopy cover on the accuracy of two individual tree measurement algorithms using lidar data. Can. J. Remote Sens. 2008, 34 (Suppl. S2), S338–S350. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-de-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Martínez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A. Automatic forest-fire measuring using ground stations and unmanned aerial systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef] [PubMed]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; et al. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Sperlich, M.; Kattenborn, T.; Koch, B.; Kattenborn, G. Potential of Unmanned Aerial Vehicle Based Photogrammetric Point Clouds for Automatic Single Tree Detection. Available online: http://www.dgpf.de/neu/Proc2014/proceedings/papers/Beitrag270.pdf (accessed on 15 January 2015).
- La, H.P.; Eo, Y.D.; Chang, A.; Kim, C. Extraction of individual tree crown using hyperspectral image and LiDAR data. KSCE J. Civ. Eng. 2015, 19, 1078–1087. [Google Scholar] [CrossRef]
- Zhou, J.; Proisy, C.; Descombes, X.; Le Maire, G.; Nouvellon, Y.; Stape, J.L.; Viennois, G.; Zerubia, J.; Couteron, P. Mapping local density of young Eucalyptus plantations by individual tree detection in high spatial resolution satellite images. For. Ecol. Manag. 2013, 301, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A benchmark of lidar-based single tree detection methods using heterogeneous forest data from the alpine space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef] [Green Version]
- Astrup, R.; Ducey, M.J.; Granhus, A.; Ritter, T.; von Lüpke, N. Approaches for estimating stand-level volume using terrestrial laser scanning in a single-scan mode. Can. J. For. Res. 2014, 44, 666–676. [Google Scholar] [CrossRef]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Ritter, T.; Schwarz, M.; Tockner, A.; Leisch, F.; Nothdurft, A. Automatic Mapping of Forest Stands Based on Three-Dimensional Point Clouds Derived from Terrestrial Laser-Scanning. Forests 2017, 8, 265. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Lin, Y.; Jiang, M.; Yao, Y.; Zhang, L.; Lin, J. Use of UAV oblique imaging for the detection of individual trees in residential environments. Urban For. Urban Green. 2015, 14, 404–412. [Google Scholar] [CrossRef]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing ALS and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Penner, M.; Woods, M.; Pitt, D.G. A comparison of airborne laser scanning and image point cloud derived tree size class distribution models in boreal Ontario. Forests 2015, 6, 4034–4054. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Korpela, I.; Maltamo, M.; Tokola, T. Imputation of single-tree attributes using airborne laser scanning-based height, intensity, and alpha shape metrics. Remote Sens. Environ. 2010, 114, 1263–1276. [Google Scholar] [CrossRef]
- Wing, M.G.; Eklund, A.; John, S.; Richard, K. Horizontal measurement performance of five mapping-grade global positioning system receiver configurations in several forested settings. West. J. Appl. For. 2008, 23, 166–171. [Google Scholar]
- Asner, G.P.; Heidebrecht, K.B. Spectral unmixing of vegetation, soil and dry carbon cover in arid regions: Comparing multispectral and hyperspectral observations. Int. J. Remote Sens. 2002, 23, 3939–3958. [Google Scholar] [CrossRef]
- Wulder, M.A.; Dechka, J.A.; Gillis, M.A.; Luther, J.E.; Hall, R.J.; Beaudoin, A.; Franklin, S.E. Operational mapping of the land cover of the forested area of Canada with Landsat data: EOSD land cover program. For. Chron. 2003, 79, 1075–1083. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.N.; et al. Individual tree detection and classification with UAV-based photogrammetric point clouds and hyperspectral imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G.; Dai, L. Roles of digital technology in China’s sustainable forestry development. Int. J. Sustain. Dev. World Ecol. 2009, 16, 94–101. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. D4AR—A 4-dimensional augmented reality model for automating construction progress monitoring data collection, processing and communication. J. Inf. Technol. Constr. 2009, 14, 129–153. [Google Scholar]
- Jat, P.; Serre, M.L. Bayesian Maximum Entropy space/time estimation of surface water chloride in Maryland using river distances. Environ. Pollut. 2016, 219, 1148–1155. [Google Scholar] [CrossRef] [PubMed]
- Green, S.; Bevan, A.; Shapland, M. A comparative assessment of structure from motion methods for archaeological research. J. Archaeol. Sci. 2014, 46, 173–181. [Google Scholar] [CrossRef]
- Azadeh, A.; Taghipour, M.; Asadzadeh, S.M.; Abdollahi, M. Artificial immune simulation for improved forecasting of electricity consumption with random variations. Int. J. Electr. Power Energy Syst. 2014, 55, 205–224. [Google Scholar] [CrossRef]
- Murugesan, S.; Bouchard, K.; Chang, E.; Dougherty, M.; Hamann, B.; Weber, G.H. Multi-scale visual analysis of time-varying electrocorticography data via clustering of brain regions. BMC Bioinform. 2017, 18, 236. [Google Scholar] [CrossRef] [PubMed]
- Johnston, A.N.; Moskal, L.M. High-resolution habitat modeling with airborne LiDAR for red tree voles. J. Wildl. Manag. 2017, 81, 58–72. [Google Scholar] [CrossRef]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. GISci. Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Value |
|---|---|
| Number of images | 383 |
| Flying altitude | 115.29 m |
| Ground resolution | 0.03 m·pix−1 |
| Coverage area | 0.42 km−2 |
| Camera stations | 351 |
| Tie-points | 87,635 |
| Error | 0.76 pix |
| Ref. (FID) | Ref. (N) | Fixed Tree Window Sizes (FWS) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 × 3 | 5 × 5 | 7 × 7 | 9 × 9 | ||||||||||||||
| Smoothing Window Sizes (SWS) | |||||||||||||||||
| NF | 3 × 3 | 5 × 5 | 7 × 7 | NF | 3 × 3 | 5 × 5 | 7 × 7 | NF | 3 × 3 | 5 × 5 | 7 × 7 | NF | 3 × 3 | 5 × 5 | 7 × 7 | ||
| 1 | 16 | 24 | 12 | 9 | 7 | 13 | 11 | 9 | 6 | 9 | 10 | 8 | 5 | 6 | 8 | 8 | 5 |
| 2 | 18 | 39 | 17 | 13 | 11 | 22 | 13 | 12 | 9 | 14 | 13 | 9 | 8 | 9 | 8 | 9 | 7 |
| 3 | 17 | 54 | 22 | 14 | 6 | 22 | 18 | 11 | 6 | 15 | 14 | 8 | 5 | 12 | 10 | 6 | 3 |
| 4 | 10 | 34 | 12 | 8 | 6 | 12 | 9 | 7 | 5 | 7 | 8 | 6 | 5 | 5 | 6 | 5 | 5 |
| 5 | 10 | 43 | 11 | 6 | 7 | 17 | 9 | 7 | 4 | 9 | 8 | 5 | 4 | 5 | 4 | 4 | 4 |
| 6 | 6 | 28 | 6 | 4 | 3 | 10 | 4 | 3 | 3 | 5 | 3 | 3 | 3 | 5 | 3 | 3 | 3 |
| 7 | 19 | 24 | 13 | 11 | 4 | 15 | 12 | 9 | 4 | 10 | 10 | 9 | 4 | 7 | 8 | 7 | 2 |
| 8 | 10 | 19 | 13 | 6 | 4 | 5 | 7 | 5 | 4 | 3 | 4 | 4 | 3 | 0 | 2 | 3 | 2 |
| 9 | 7 | 27 | 6 | 6 | 5 | 9 | 6 | 5 | 5 | 4 | 6 | 5 | 5 | 3 | 6 | 5 | 4 |
| 10 | 12 | 30 | 12 | 8 | 6 | 9 | 10 | 6 | 5 | 6 | 6 | 5 | 3 | 5 | 5 | 5 | 3 |
| 11 | 15 | 29 | 12 | 10 | 6 | 15 | 11 | 9 | 6 | 9 | 10 | 8 | 6 | 7 | 9 | 7 | 5 |
| 12 | 19 | 39 | 19 | 14 | 10 | 21 | 16 | 13 | 8 | 13 | 16 | 12 | 6 | 9 | 11 | 11 | 5 |
| 13 | 12 | 33 | 10 | 10 | 9 | 13 | 10 | 10 | 8 | 10 | 10 | 10 | 8 | 7 | 10 | 9 | 8 |
| 14 | 9 | 33 | 9 | 8 | 8 | 15 | 8 | 7 | 7 | 9 | 8 | 7 | 6 | 7 | 7 | 7 | 4 |
| 15 | 20 | 42 | 19 | 13 | 9 | 18 | 16 | 11 | 5 | 14 | 13 | 10 | 5 | 11 | 11 | 6 | 3 |
| 16 | 13 | 20 | 13 | 11 | 5 | 13 | 11 | 10 | 5 | 10 | 10 | 10 | 5 | 6 | 10 | 8 | 4 |
| 17 | 10 | 32 | 10 | 10 | 8 | 14 | 10 | 9 | 7 | 10 | 10 | 9 | 7 | 10 | 10 | 8 | 6 |
| 18 | 11 | 27 | 11 | 11 | 7 | 13 | 9 | 9 | 4 | 8 | 9 | 8 | 4 | 7 | 10 | 7 | 3 |
| 19 | 13 | 24 | 13 | 10 | 8 | 13 | 10 | 9 | 7 | 9 | 9 | 9 | 7 | 7 | 9 | 8 | 6 |
| 20 | 7 | 26 | 7 | 6 | 4 | 10 | 6 | 6 | 4 | 5 | 6 | 5 | 4 | 5 | 5 | 5 | 3 |
| 21 | 22 | 29 | 17 | 10 | 9 | 17 | 12 | 9 | 6 | 11 | 8 | 8 | 6 | 7 | 8 | 7 | 4 |
| 22 | 10 | 33 | 11 | 10 | 6 | 15 | 10 | 8 | 5 | 11 | 10 | 7 | 4 | 6 | 7 | 6 | 4 |
| 23 | 7 | 33 | 7 | 7 | 4 | 15 | 7 | 6 | 4 | 9 | 7 | 4 | 4 | 5 | 5 | 4 | 4 |
| 24 | 13 | 35 | 15 | 11 | 8 | 13 | 13 | 9 | 6 | 9 | 8 | 7 | 5 | 7 | 7 | 7 | 4 |
| 25 | 6 | 21 | 5 | 5 | 3 | 6 | 7 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 2 | 3 | 3 |
| 26 | 8 | 25 | 9 | 8 | 6 | 10 | 8 | 8 | 5 | 9 | 8 | 8 | 5 | 9 | 7 | 6 | 4 |
| 27 | 10 | 28 | 11 | 8 | 4 | 16 | 11 | 5 | 4 | 7 | 6 | 3 | 4 | 3 | 5 | 4 | 4 |
| 28 | 14 | 30 | 14 | 8 | 9 | 12 | 11 | 8 | 6 | 9 | 8 | 7 | 5 | 9 | 8 | 6 | 4 |
| 29 | 13 | 25 | 12 | 6 | 3 | 11 | 7 | 4 | 3 | 5 | 4 | 4 | 3 | 3 | 3 | 3 | 3 |
| 30 | 10 | 30 | 10 | 9 | 7 | 14 | 9 | 8 | 6 | 10 | 8 | 6 | 5 | 6 | 7 | 6 | 5 |
| Total | 367 | 916 | 358 | 270 | 192 | 408 | 301 | 235 | 160 | 262 | 253 | 207 | 147 | 191 | 211 | 183 | 124 |
| Number of Trees | ||||||||
|---|---|---|---|---|---|---|---|---|
| Ref. (FID) | Ref. (N) | UAV | FP | FN | TP | r | p | F |
| 1 | 16 | 12 | 0 | 4 | 12 | 0.75 | 1.00 | 0.86 |
| 2 | 18 | 17 | 1 | 2 | 16 | 0.89 | 0.94 | 0.91 |
| 3 | 17 | 22 | 6 | 1 | 16 | 0.94 | 0.73 | 0.82 |
| 4 | 10 | 12 | 2 | 0 | 10 | 1.00 | 0.83 | 0.91 |
| 5 | 10 | 11 | 2 | 1 | 9 | 0.90 | 0.82 | 0.86 |
| 6 | 6 | 6 | 1 | 1 | 5 | 0.83 | 0.83 | 0.83 |
| 7 | 19 | 13 | 0 | 6 | 13 | 0.68 | 1.00 | 0.81 |
| 8 | 10 | 13 | 4 | 1 | 9 | 0.90 | 0.69 | 0.78 |
| 9 | 7 | 6 | 1 | 2 | 5 | 0.71 | 0.83 | 0.77 |
| 10 | 12 | 12 | 3 | 3 | 9 | 0.75 | 0.75 | 0.75 |
| 11 | 15 | 12 | 1 | 4 | 11 | 0.73 | 0.92 | 0.81 |
| 12 | 19 | 19 | 2 | 2 | 17 | 0.89 | 0.89 | 0.89 |
| 13 | 12 | 10 | 0 | 2 | 10 | 0.83 | 1.00 | 0.91 |
| 14 | 9 | 9 | 1 | 1 | 8 | 0.89 | 0.89 | 0.89 |
| 15 | 20 | 19 | 2 | 3 | 17 | 0.85 | 0.89 | 0.87 |
| 16 | 13 | 13 | 1 | 1 | 12 | 0.92 | 0.92 | 0.92 |
| 17 | 10 | 10 | 2 | 2 | 8 | 0.80 | 0.80 | 0.80 |
| 18 | 11 | 11 | 3 | 3 | 8 | 0.73 | 0.73 | 0.73 |
| 19 | 13 | 13 | 1 | 1 | 12 | 0.92 | 0.92 | 0.92 |
| 20 | 7 | 7 | 1 | 1 | 6 | 0.86 | 0.86 | 0.86 |
| 21 | 22 | 17 | 0 | 5 | 17 | 0.77 | 1.00 | 0.87 |
| 22 | 10 | 11 | 1 | 0 | 10 | 1.00 | 0.91 | 0.95 |
| 23 | 7 | 7 | 1 | 1 | 6 | 0.86 | 0.86 | 0.86 |
| 24 | 13 | 15 | 2 | 0 | 13 | 1.00 | 0.87 | 0.93 |
| 25 | 6 | 5 | 0 | 1 | 5 | 0.83 | 1.00 | 0.91 |
| 26 | 8 | 9 | 1 | 0 | 8 | 1.00 | 0.89 | 0.94 |
| 27 | 10 | 11 | 3 | 2 | 8 | 0.80 | 0.73 | 0.76 |
| 28 | 14 | 14 | 2 | 2 | 12 | 0.86 | 0.86 | 0.86 |
| 29 | 13 | 12 | 1 | 2 | 11 | 0.85 | 0.92 | 0.88 |
| 30 | 10 | 10 | 2 | 2 | 8 | 0.80 | 0.80 | 0.80 |
| Total | 367 | 358 | 47 | 56 | 311 | 0.85 | 0.87 | 0.86 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. https://doi.org/10.3390/f8090340
Mohan M, Silva CA, Klauberg C, Jat P, Catts G, Cardil A, Hudak AT, Dia M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests. 2017; 8(9):340. https://doi.org/10.3390/f8090340
Chicago/Turabian StyleMohan, Midhun, Carlos Alberto Silva, Carine Klauberg, Prahlad Jat, Glenn Catts, Adrián Cardil, Andrew Thomas Hudak, and Mahendra Dia. 2017. "Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest" Forests 8, no. 9: 340. https://doi.org/10.3390/f8090340
APA StyleMohan, M., Silva, C. A., Klauberg, C., Jat, P., Catts, G., Cardil, A., Hudak, A. T., & Dia, M. (2017). Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests, 8(9), 340. https://doi.org/10.3390/f8090340