Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
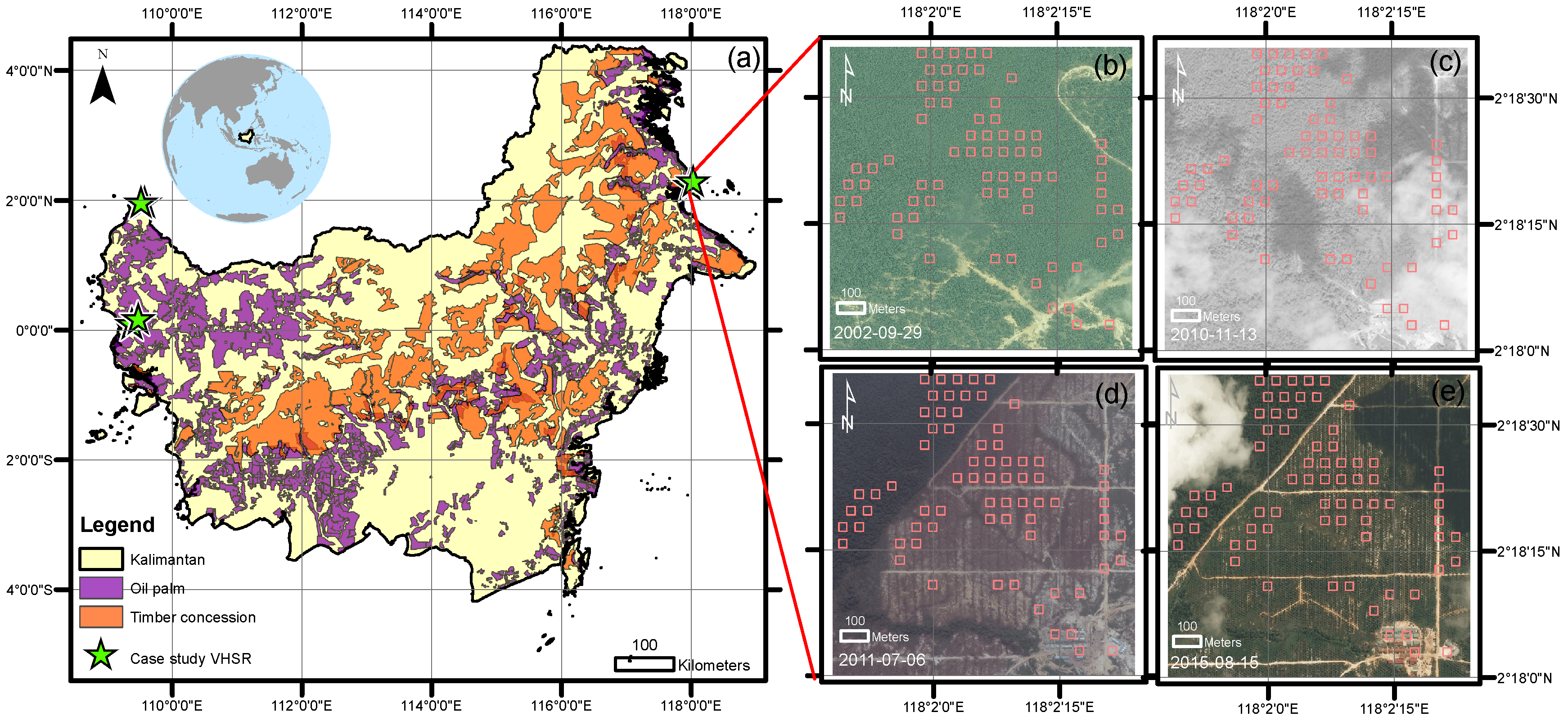
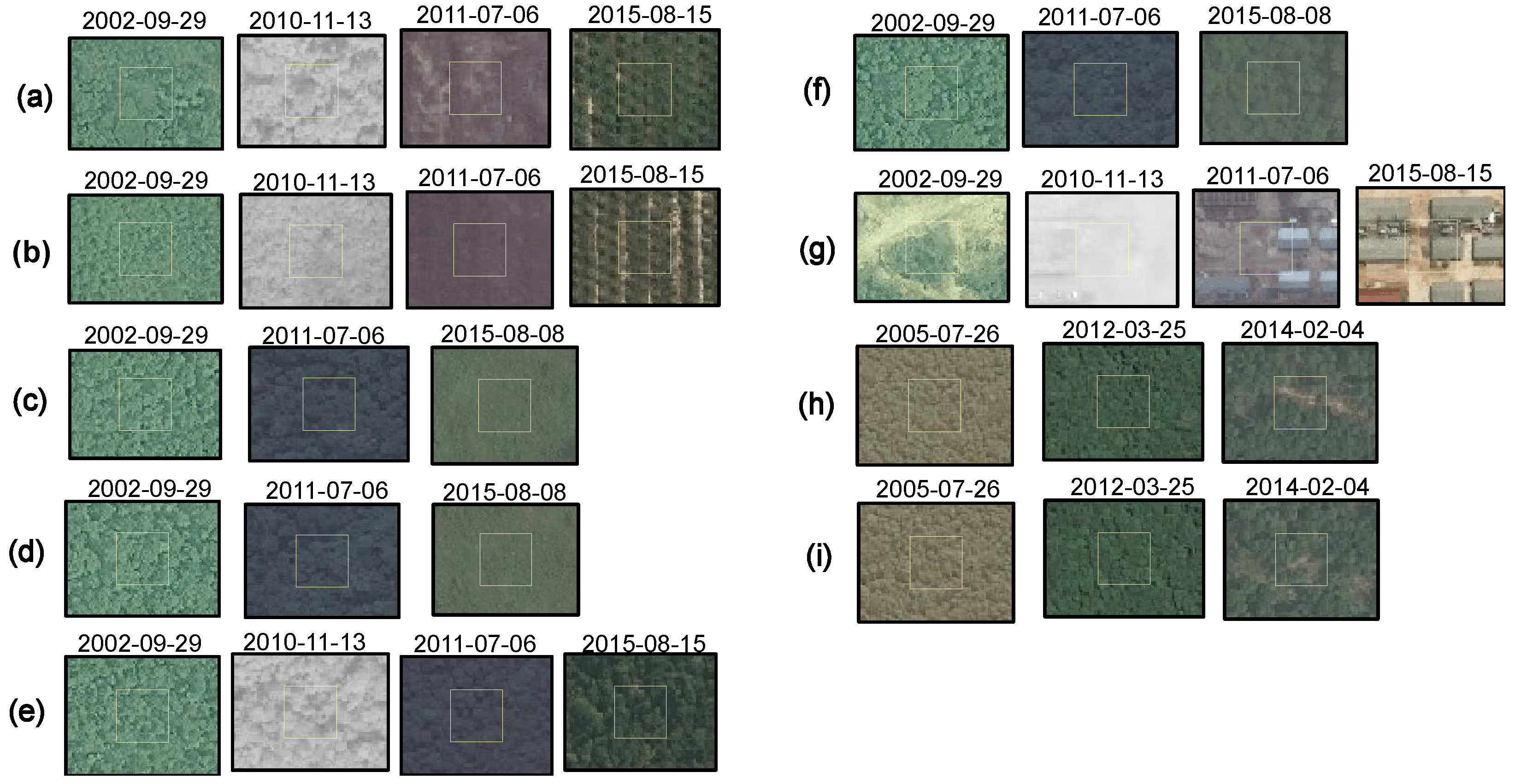
2.1. Case Study Area
2.2. Satellite Data
2.3. Deforestation Detection Algorithm
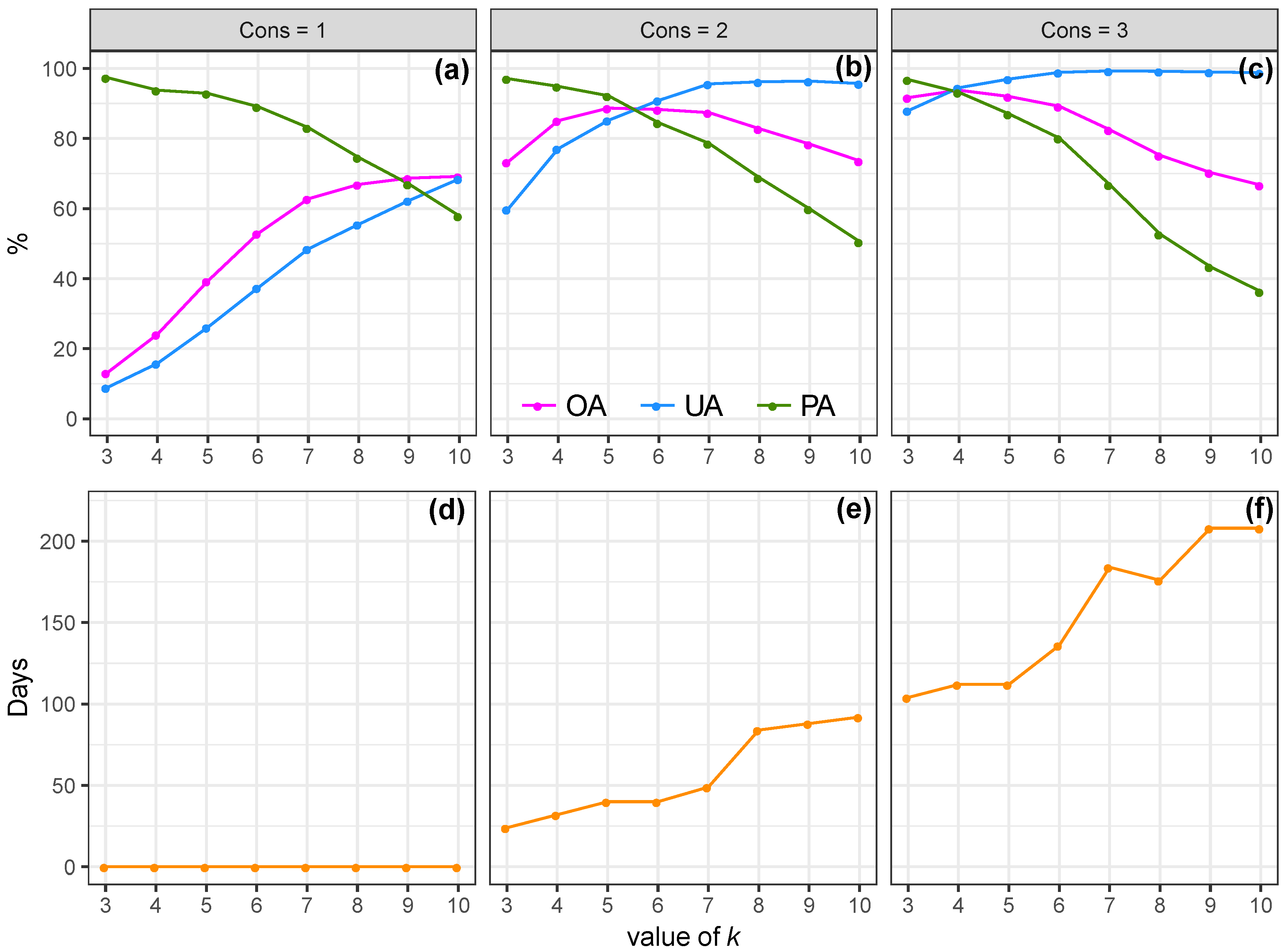
2.4. Spatial and Temporal Accuracy Assessment
3. Results
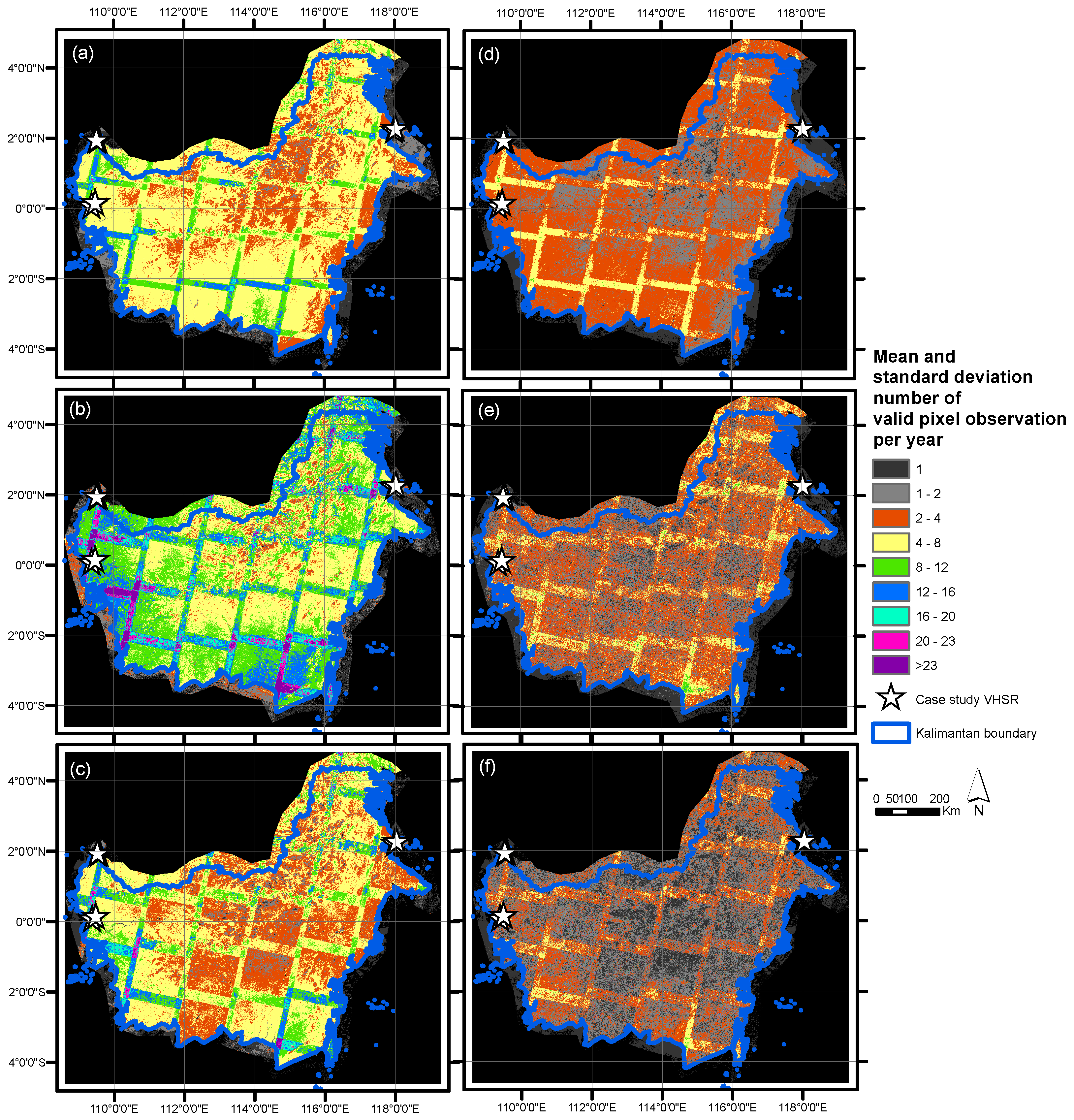
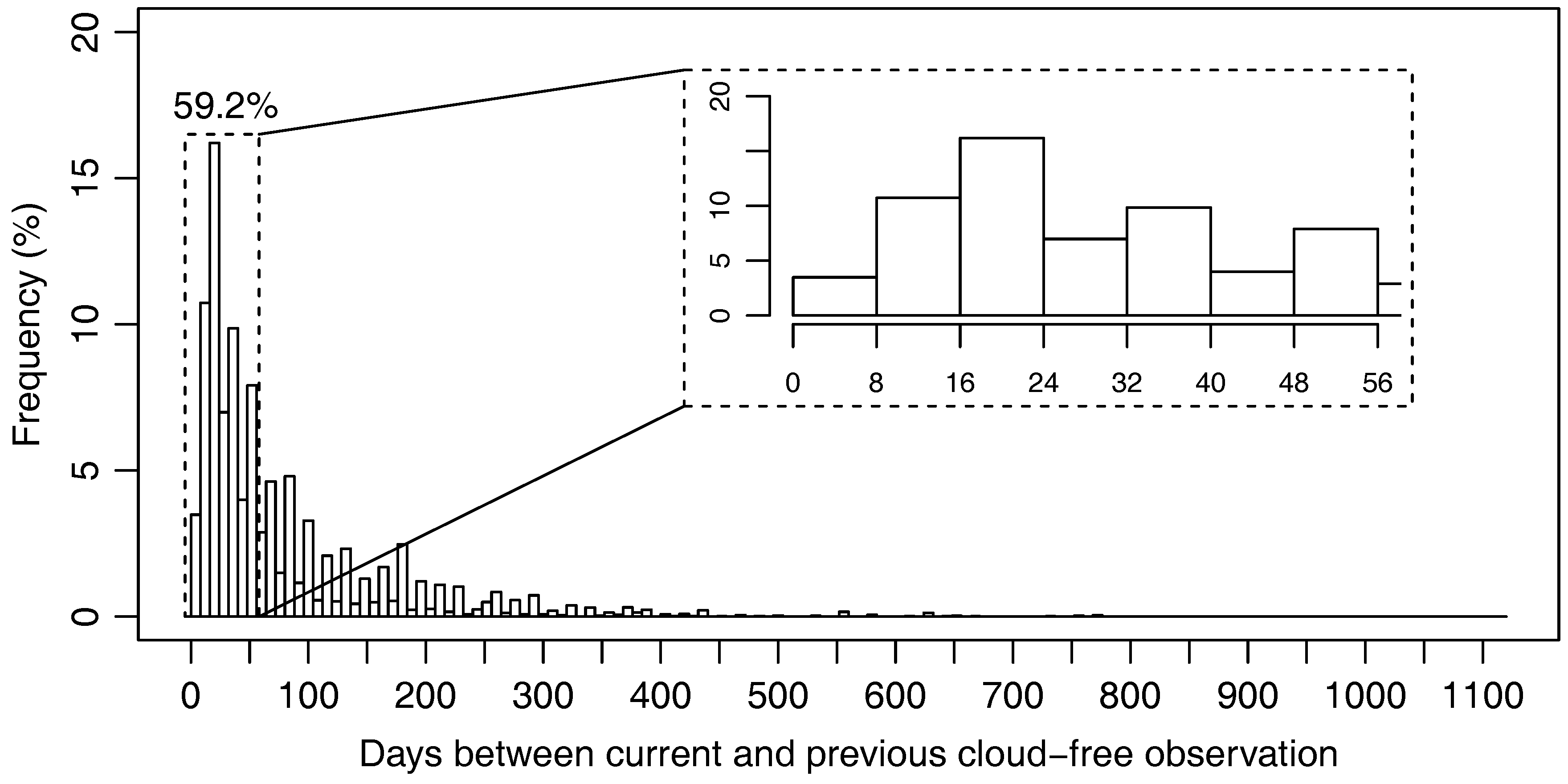
3.1. Availability of Landsat Cloud-Free Observations
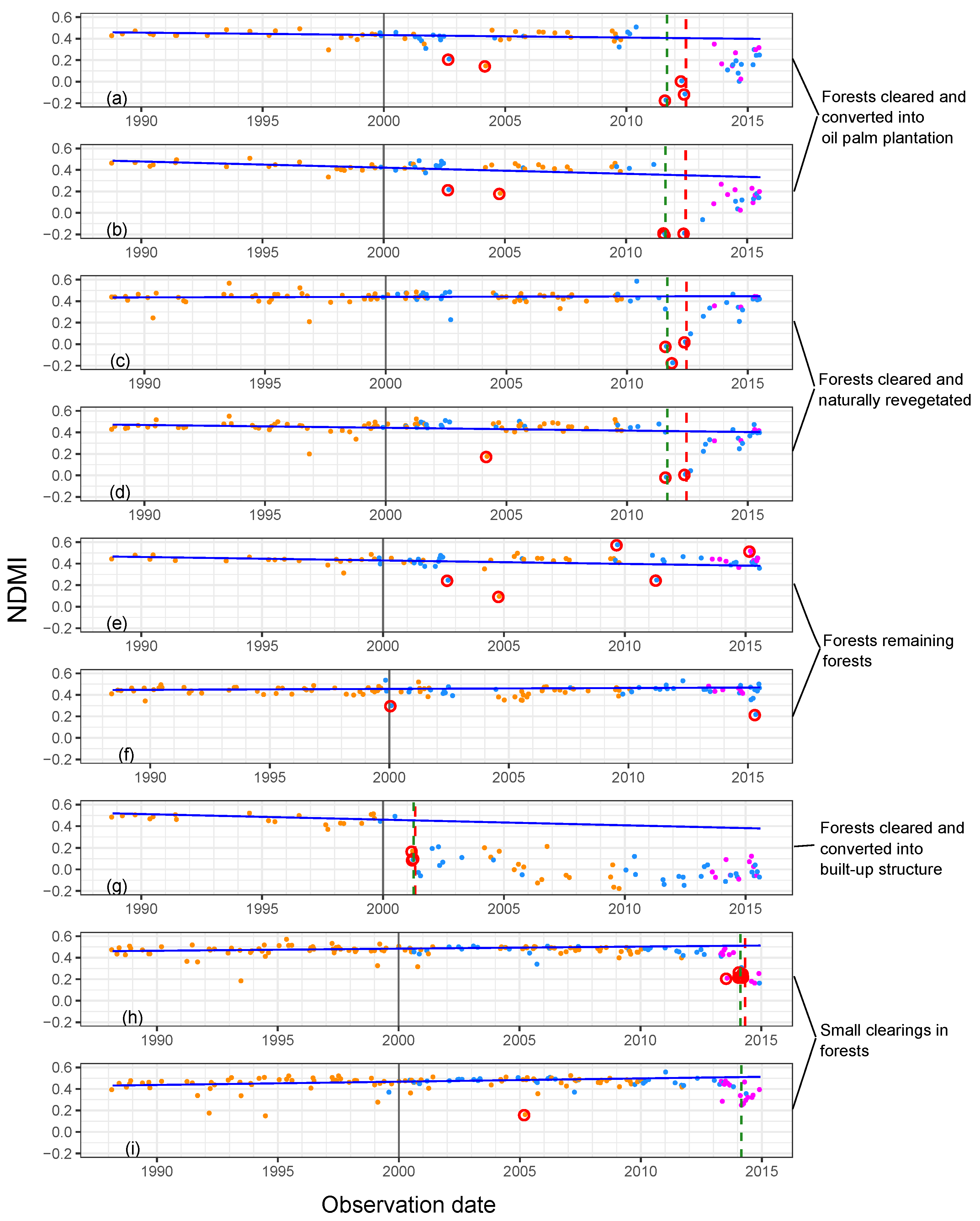
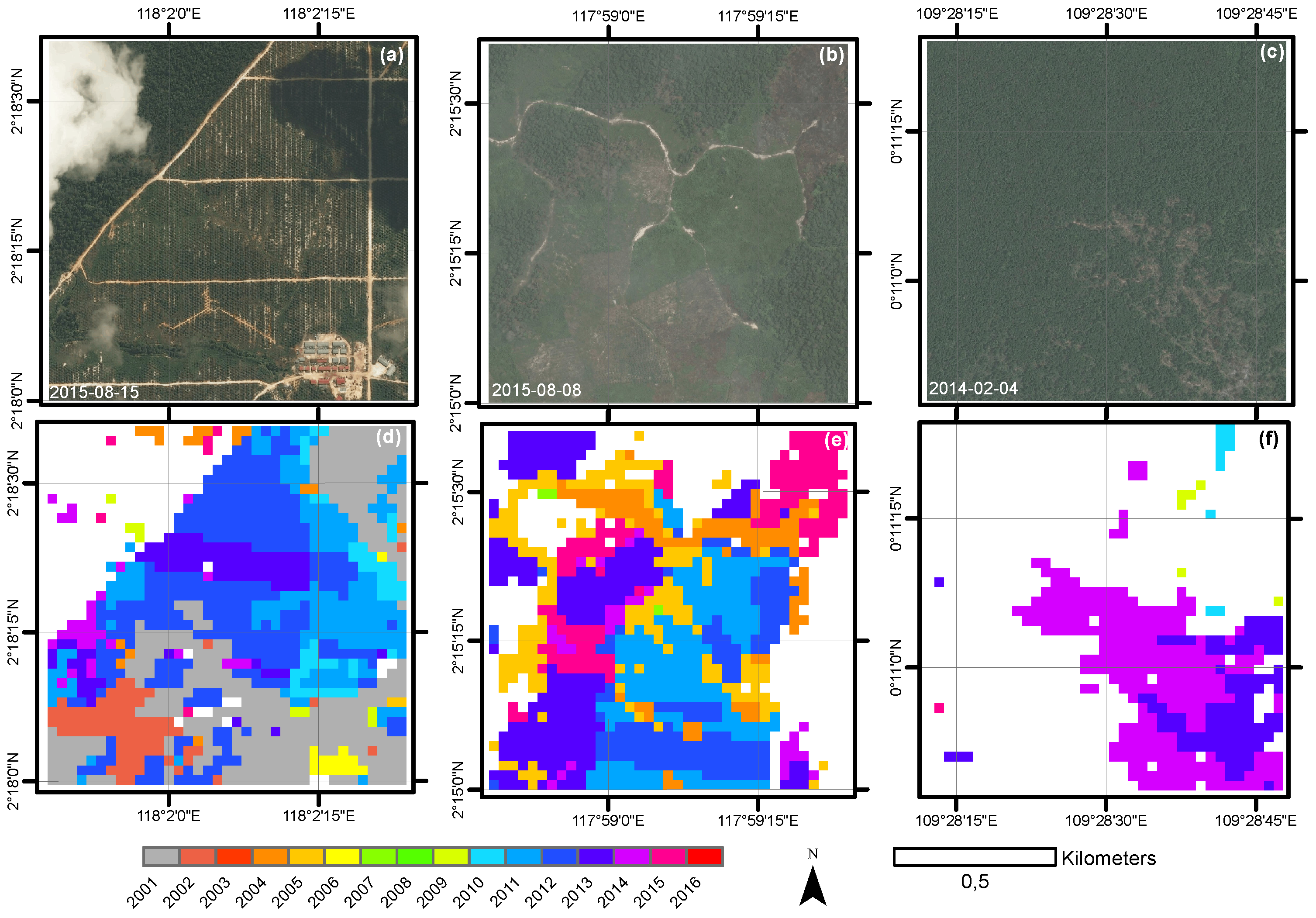
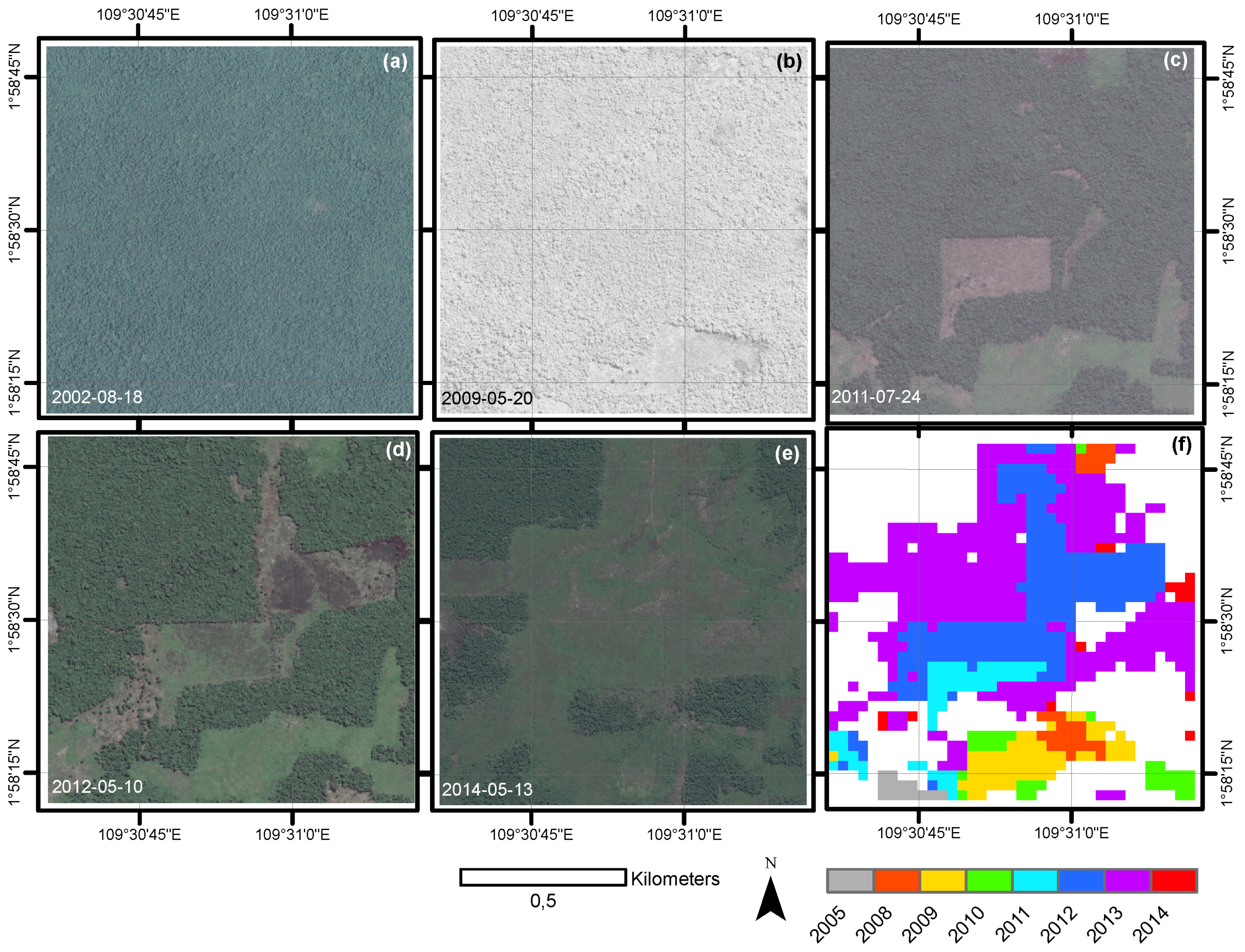
3.2. Demonstration of Deforestation Detection Algorithm
3.3. Spatial and Temporal Accuracies
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene Extent (UL, UR, LR, LL) 1 | Date | Max. GSD 2 (m) | Satellite Sensor 3 | Image ID 4 |
|---|---|---|---|---|
| (E, N), | 29 September 2002 | 0.64 | QB02 | 10100100014C2400 |
| (E, N), | 13 November 2010 | 0.52 | WV01 | 1020010010994400 |
| (E, N), | 6 July 2011 | 0.51 | WV02 | 103001000C43D400 |
| (E, N) | 15 August 2015 | 0.48 | WV02 | 103001004745BD00 |
| (E, N), | 29 September 2002 | 0.64 | QB02 | 10100100014C2400 |
| (E, N), | 6 July 2011 | 0.51 | WV02 | 103001000C43D400 |
| (E, N), | 8 August 2015 | 0.32 | WV03 | 104001000F239500 |
| (E, N) | ||||
| (E, N), | 26 July 2005 | 0.66 | QB02 | 1010010004662000 |
| (E, N), | 25 March 2012 | 0.49 | WV02 | 10300100125BA700 |
| (E, N), | 4 February 2014 | 0.50 | WV02 | 103001002D511800 |
| (E, N) | ||||
| (E, N), | 18 August 2002 | 0.65 | QB02 | 101001000106D600 |
| (E, N), | 20 May 2009 | 0.50 | WV01 | 1020010008253A00 |
| (E, N), | 24 July 2011 | 0.48 | WV02 | 103001000CB05100 |
| (E, N) | 10 May 2012 | 0.47 | WV02 | 10300100184FB800 |
| 13 May 2014 | 0.48 | WV02 | 10300100308D4700 | |
| (E, N), | 26 July 2005 | 0.66 | QB02 | 1010010004662000 |
| (E, N), | 25 March 2012 | 0.49 | WV02 | 10300100125BA700 |
| (E, N), | 24 February 2014 | 0.50 | WV02 | 103001002D511800 |
| (E, N) | ||||
| (E, N), | 28 May 2009 | 0.71 | QB02 | 1010010009AE3300 |
| (E, N), | 16 July 2009 | 0.61 | QB02 | 1010010009F03000 |
| (E, N), | 24 July 2011 | 0.48 | WV02 | 103001000CB05100 |
| (E, N) | 13 May 2014 | 0.48 | WV02 | 10300100308D4700 |
Appendix B
| fordo |
| if then |
| for do |
| if all and then |
| break |
| else |
| end if |
| end for |
| end if |
| end for |
References
- United Nations Framework Convention on Climate Change. Adoption of the Paris Agreement. Technical Report, Paris. 2015. Available online: https://unfccc.int/files/essential_background/convention/application/pdf/english_paris_agreement.pdf (accessed on 1 June 2017).
- Van der Werf, G.R.; Morton, D.C.; DeFries, R.S.; Olivier, J.G.; Kasibhatla, P.S.; Jackson, R.B.; Collatz, G.J.; Randerson, J.T. CO2 emissions from forest loss. Nat. Geosci. 2009, 2, 737–738. [Google Scholar] [CrossRef]
- Baccini, A.; Goetz, S.J.; Walker, W.S.; Laporte, N.T.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.S.A.; Dubayah, R.; Friedl, M.A.; Samanta, S.; Houghton, R.A. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nat. Clim. Chang. 2012, 3, 182–185. [Google Scholar] [CrossRef]
- Le Quéré, C.; Andrew, R.M.; Canadell, J.G.; Sitch, S.; Ivar Korsbakken, J.; Peters, G.P.; Manning, A.C.; Boden, T.A.; Tans, P.P.; Houghton, R.A.; et al. Global Carbon Budget 2016. Earth Syst. Sci. Data 2016, 8, 605–649. [Google Scholar] [CrossRef] [Green Version]
- Houghton, R.A.; Byers, B.; Nassikas, A.A. A role for tropical forests in stabilizing atmospheric CO2. Nat. Clim. Chang. 2015, 5, 1022–1023. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Gaveau, D.L.A.; Sheil, D.; Husnayaen; Salim, M.A.; Arjasakusuma, S.; Ancrenaz, M.; Pacheco, P.; Meijaard, E. Rapid conversions and avoided deforestation: Examining four decades of industrial plantation expansion in Borneo. Sci. Rep. 2016, 6, 32017. [Google Scholar] [CrossRef] [PubMed]
- Margono, B.A.; Potapov, P.V.; Turubanova, S.; Stolle, F.; Hansen, M.C. Primary forest cover loss in Indonesia over 2000–2012. Nat. Clim. Chang. 2014, 4, 730–735. [Google Scholar] [CrossRef]
- Koh, L.P.; Miettinen, J.; Liew, S.C.; Ghazoul, J. Remotely sensed evidence of tropical peatland conversion to oil palm. Proc. Natl. Acad. Sci. USA 2011, 108, 5127–5132. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gaveau, D.L.A.; Sloan, S.; Molidena, E.; Yaen, H.; Sheil, D.; Abram, N.K.; Ancrenaz, M.; Nasi, R.; Quinones, M.; Wielaard, N.; et al. Four Decades of Forest Persistence, Clearance and Logging on Borneo. PLoS ONE 2014, 9, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Avitabile, V.; Herold, M.; Heuvelink, G.B.M.; Lewis, S.L.; Phillips, O.L.; Asner, G.P.; Armston, J.; Ashton, P.S.; Banin, L.; Bayol, N.; et al. An integrated pan-tropical biomass map using multiple reference datasets. Glob. Chang. Biol. 2016, 22, 1406–1420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sullivan, M.J.; Talbot, J.; Lewis, S.L.; Phillips, O.L.; Qie, L.; Begne, S.K.; Chave, J.; Cuni-Sanchez, A.; Hubau, W.; Lopez-Gonzalez, G.; et al. Diversity and carbon storage across the tropical forest biome. Sci. Rep. 2017, 7, 39102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- GOFC-GOLD. A Sourcebook of Methods and Procedures for Monitoring and Reporting Anthropogenic Greenhouse Gas Emissions and Removals Associated with Deforestation, Gains and Losses of Carbon Stocks in Forests Remaining Forests, and Forestation; Technical Report; GOFC-GOLD Land Cover Project Office: Wageningen, The Netherlands; Wageningen University: Wageningen, The Netherlands, 2016. [Google Scholar]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Austin, K.G.; González-Roglich, M.; Schaffer-Smith, D.; Schwantes, A.M.; Swenson, J.J. Trends in size of tropical deforestation events signal increasing dominance of industrial-scale drivers. Environ. Res. Lett. 2017, 12, 054009. [Google Scholar] [CrossRef] [Green Version]
- Pelletier, J.; Martin, D.; Potvin, C. REDD+ emissions estimation and reporting: Dealing with uncertainty. Environ. Res. Lett. 2013, 8, 034009. [Google Scholar] [CrossRef]
- Margono, B.A.; Turubanova, S.; Zhuravleva, I.; Potapov, P.; Tyukavina, A.; Baccini, A.; Goetz, S.; Hansen, M.C. Mapping and monitoring deforestation and forest degradation in Sumatra (Indonesia) using Landsat time series data sets from 1990 to 2010. Environ. Res. Lett. 2012, 7, 034010. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Broich, M.; Hansen, M.C.; Potapov, P.; Adusei, B.; Lindquist, E.; Stehman, S.V. Time-series analysis of multi-resolution optical imagery for quantifying forest cover loss in Sumatra and Kalimantan, Indonesia. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 277–291. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Pereira, R., Jr.; Zweede, J.C.; Silva, J.N.M. Canopy Damage and Recovery After Selective Logging in Amazonia: Field and Satellite Studies. Ecol. Appl. 2004, 14, 280–298. [Google Scholar] [CrossRef]
- Cohen, W.B.; Healey, S.P.; Yang, Z.; Stehman, S.V.; Brewer, C.K.; Brooks, E.B.; Gorelick, N.; Huang, C.; Hughes, M.J.; Kennedy, R.E.; et al. How Similar Are Forest Disturbance Maps Derived from Different Landsat Time Series Algorithms? Remote Sens. 2017, 8, 98. [Google Scholar] [CrossRef]
- Fuller, D.O.; Jessup, T.C.; Salim, A. Loss of Forest Cover in Kalimantan, Indonesia, Since the 1997–1998 El Nino. Conserv. Biol. 2004, 18, 249–254. [Google Scholar] [CrossRef]
- MacKinnon, K.; Hatta, G.; Halim, H.; Mangalik, A. The Ecology of Kalimantan; Periplus Editions: Hong Kong, China, 1996; p. 802. [Google Scholar]
- Margono, B.A.; Potapov, P.; Turubanova, S.; Stolle, F.; Hansen, M. Primary forest cover loss in Indonesia over 2000–2012. Available online: http://www.glad.umd.edu/dataset/primary-forest-cover-loss-indonesia-2000-2012 (accessed on 20 June 2017).
- Indonesia Ministry of Forestry, Greenpeace, and WRI. “Indonesia Oil Palm Concessions”. Available online: www.globalforestwatch.org (accessed on 20 June 2017).
- Indonesia Ministry of Forestry, Greenpeace, and WRI. “Indonesia Logging Concessions”. Available online: www.globalforestwatch.org (accessed on 20 June 2017).
- Protecting Forests & Peatlands in Indonesia. Available online: http://www.greenpeace.org/seasia/id/Global/seasia/Indonesia/Code/Forest-Map/en/data.html (accessed on 20 June 2017).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Google Earth Engine API—Introduction. Available online: https://developers.google.com/earth-engine/ (accessed on 1 July 2017).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017. [Google Scholar]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- USGS. U.S. Geological Survey. Available online: https://landsat.usgs.gov/landsat-surface-reflectance-data-products (accessed on 1 June 2017).
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- USGS. U.S. Geological Survey. Available online: https://landsat.usgs.gov/what-are-band-designations-landsat-satellites (accessed on 1 June 2017).
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef]
- DeVries, B.; Decuyper, M.; Verbesselt, J.; Zeileis, A.; Herold, M.; Joseph, S. Tracking disturbance-regrowth dynamics in tropical forests using structural change detection and Landsat time series. Remote Sens. Environ. 2015, 169, 320–334. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Technical Report; NASA/GSFC: Greenbelt, MD, USA, 1973.
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.; Gao, X.; Ferreira, L. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Landscape Assessment (LA). FIREMON: Fire Effects Monitoring and Inventory System; Gen. Tech. Rep. RMRS-GTR-164-CD, Technical Report; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- Schultz, M.; Clevers, J.G.P.W.; Carter, S.; Verbesselt, J.; Avitabile, V.; Quang, H.V.; Herold, M. Performance of vegetation indices from Landsat time series in deforestation monitoring. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 318–327. [Google Scholar] [CrossRef]
- Crist, E.P. A TM Tasseled Cap Equivalent Transformation for Reflectance Factor Data. Remote Sens. Environ. 1985, 17, 301–306. [Google Scholar] [CrossRef]
- Hamunyela, E.; Verbesselt, J.; Roerink, G.; Herold, M. Trends in spring phenology of western European deciduous forests. Remote Sens. 2013, 5, 6159–6179. [Google Scholar] [CrossRef]
- Houborg, R.; McCabe, M.F. A Cubesat enabled Spatio-Temporal Enhancement Method (CESTEM) utilizing Planet, Landsat and MODIS data. Remote Sens. Environ. 2018, 209, 211–226. [Google Scholar] [CrossRef]
- Miettinen, J.; Stibig, H.J.; Achard, F. Remote sensing of forest degradation in Southeast Asia-Aiming for a regional view through 5–30 m satellite data. Glob. Ecol. Conserv. 2014, 2, 24–36. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef] [Green Version]
- Reiche, J.; Hamunyela, E.; Verbesselt, J.; Hoekman, D.; Herold, M. Improving near-real time deforestation monitoring in tropical dry forests by combining dense Sentinel-1 time series with Landsat and ALOS-2 PALSAR-2. Remote Sens. Environ. 2018, 204, 147–161. [Google Scholar] [CrossRef]
- Romijn, E.; De Sy, V.; Herold, M.; Böttcher, H.; Roman-Cuesta, R.M.; Fritz, S.; Schepaschenko, D.; Avitabile, V.; Gaveau, D.; Verchot, L.; et al. Independent data for transparent monitoring of greenhouse gas emissions from the land use sector—What do stakeholders think and need? Environ. Sci. Policy 2018, 85, 101–112. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Hamunyela, E.; Verbesselt, J.; Herold, M. Using spatial context to improve early detection of deforestation from Landsat time series. Remote Sens. Environ. 2016, 172, 126–138. [Google Scholar] [CrossRef]
- DeVries, B.; Verbesselt, J.; Kooistra, L.; Herold, M. Robust monitoring of small-scale forest disturbances in a tropical montane forest using Landsat time series. Remote Sens. Environ. 2015, 161, 107–121. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Automated cloud, cloud shadow, and snow detection in multitemporal Landsat data: An algorithm designed specifically for monitoring land cover change. Remote Sens. Environ. 2014, 152, 217–234. [Google Scholar] [CrossRef]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef] [Green Version]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Available online: http://data.globalforestwatch.org/datasets/194662b1470e4c5f81aa370395c75485_8 (accessed on 11 June 2018).
- See, L.; Laso Bayas, J.; Schepaschenko, D.; Perger, C.; Dresel, C.; Maus, V.; Salk, C.; Weichselbaum, J.; Lesiv, M.; McCallum, I.; et al. LACO-Wiki: A New Online Land Cover Validation Tool Demonstrated Using GlobeLand30 for Kenya. Remote Sens. 2017, 9, 754. [Google Scholar] [CrossRef]
- Pasquarella, V.; Holden, C.E.; Woodcock, C.E. Improved mapping of forest types using spectral-temporal Landsat features. Remote Sens. Environ. 2018, 210, 193–207. [Google Scholar] [CrossRef]
- Phompila, C.; Lewis, M.; Ostendorf, B.; Clarke, K. MODIS EVI and LST temporal response for discrimination of tropical land covers. Remote Sens. 2015, 7, 6026–6040. [Google Scholar] [CrossRef]
- Tropek, R.; Beck, J.; Keil, P.; Musilová, Z.; Irena, Š.; Storch, D. Comment on “High-resolution global maps of 21st-century forest cover change”. Science 2014, 344, 981. [Google Scholar] [CrossRef] [PubMed]
- Hansen, M.; Potapov, P.; Margono, B.; Stehman, S.; Turubanova, S.; Tyukavina, A. Response to comment on “High-resolution global maps of 21st-century forest cover change”. Science 2014, 344, 981. [Google Scholar] [CrossRef] [PubMed]
- Carlson, K.M.; Curran, L.M.; Asner, G.P.; Pittman, A.M.; Trigg, S.N.; Marion Adeney, J. Carbon emissions from forest conversion by Kalimantan oil palm plantations. Nat. Clim. Chang. 2013, 3, 283–287. [Google Scholar] [CrossRef]
- Austin, K.G.; Mosnier, A.; Pirker, J.; McCallum, I.; Fritz, S.; Kasibhatla, P.S. Shifting patterns of oil palm driven deforestation in Indonesia and implications for zero-deforestation commitments. Land Use Policy 2017, 69, 41–48. [Google Scholar] [CrossRef]
- Miettinen, J.; Shi, C.; Liew, S.C. Towards automated 10–30 m resolution land cover mapping in insular South-East Asia. Geocarto Int. 2017, 1–15. [Google Scholar] [CrossRef]
- Vogeler, J.; Braaten, J.; Slesak, R.; Falkowski, M. Extracting the full value of the Landsat archive: Inter-sensor harmonization for the mapping of Minnesota forest canopy cover (1973–2015). Remote Sens. Environ. 2018, 209, 363–374. [Google Scholar] [CrossRef]
- Chazdon, R.L. Chance and Determinism in Tropical Forest Succession. In Tropical Forest Community Ecology; Carson, W.P., Schnitzer, S.A., Eds.; Wiley-Blackwell: Chichester, UK, 2008; Chapter 23; pp. 384–408. [Google Scholar]
- Mora, F.; Jaramillo, V.J.; Bhaskar, R.; Gavito, M.; Siddique, I.; Byrnes, J.E.; Balvanera, P. Carbon Accumulation in Neotropical Dry Secondary Forests: The Roles of Forest Age and Tree Dominance and Diversity. Ecosystems 2018, 21, 536–550. [Google Scholar] [CrossRef]
- Sierra, C.A.; del Valle, J.I.; Restrepo, H.I. Total carbon accumulation in a tropical forest landscape. Carbon Balance Manag. 2012, 7, 12. [Google Scholar] [CrossRef] [PubMed]
- Sentinel-2 Mission Status Report 125 Reference Period: 24 February–2 March 2018. Available online: https://sentinel.esa.int/documents/247904/3347201/Sentinel-2-Mission-Status-Report-125-24-Feb-02-Mar-2018 (accessed on 28 March 2018).
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [Green Version]
- Upcoming Sentinel-2 Level-2A Product Evolution. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/news/-/article/upcoming-sentinel-2-level-2a-product-evolution (accessed on 28 March 2018).
- Harmonized Landsat Sentinel-2. Available online: https://hls.gsfc.nasa.gov/ (accessed on 28 March 2018).
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual constellations for global terrestrial monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Roy, D.P.; White, J.C.; Hermosilla, T. Land cover 2.0. Int. J. Remote Sens. 2018, 39, 4254–4284. [Google Scholar] [CrossRef] [Green Version]










| History Noise Removal | cons | k | OA (%) | UA (%) | PA (%) | MTL (days) | MTL (# obs) |
|---|---|---|---|---|---|---|---|
| No | 3 | 4 | 93.8 | 94.5 | 93.2 | 112 | 2 |
| Yes | 3 | 4 | 94.7 | 95.0 | 94.6 | 112 | 2 |
| No | 2 | 5.5 | 88.7 | 87.0 | 89.9 | 40 | 1 |
| Yes | 2 | 5.5 | 89.0 | 85.3 | 92.7 | 40 | 1 |
| Reference | |||||||
|---|---|---|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | UA (%) | PA (%) | OA (%) | ||
| Predicted | Non-deforestation | 208 | 22 | 230 | 90.4 | 93.7 | 91.0 |
| Deforestation | 14 | 155 | 169 | 91.7 | 87.6 | ||
| Sum | 222 | 177 | 399 | ||||
| Reference | |||||||
|---|---|---|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | UA (%) | PA (%) | OA (%) | ||
| Predicted | Non-deforestation | 204 | 9 | 213 | 95.8 | 98.1 | 96.7 |
| Deforestation | 4 | 182 | 186 | 97.8 | 95.3 | ||
| Sum | 208 | 191 | 399 | ||||
| GFW | ||||
|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | ||
| This study | Non-deforestation | 211 | 2 | 213 |
| Deforestation | 19 | 167 | 186 | |
| Sum | 230 | 169 | 399 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hadi; Krasovskii, A.; Maus, V.; Yowargana, P.; Pietsch, S.; Rautiainen, M. Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests 2018, 9, 389. https://doi.org/10.3390/f9070389
Hadi, Krasovskii A, Maus V, Yowargana P, Pietsch S, Rautiainen M. Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests. 2018; 9(7):389. https://doi.org/10.3390/f9070389
Chicago/Turabian StyleHadi, Andrey Krasovskii, Victor Maus, Ping Yowargana, Stephan Pietsch, and Miina Rautiainen. 2018. "Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia" Forests 9, no. 7: 389. https://doi.org/10.3390/f9070389
APA StyleHadi, Krasovskii, A., Maus, V., Yowargana, P., Pietsch, S., & Rautiainen, M. (2018). Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests, 9(7), 389. https://doi.org/10.3390/f9070389