
Particle-Scale Modeling to Understand Liquid Distribution in Twin-Screw Wet Granulation






Abstract
:1. Introduction
2. Particle Scale Modeling Approach
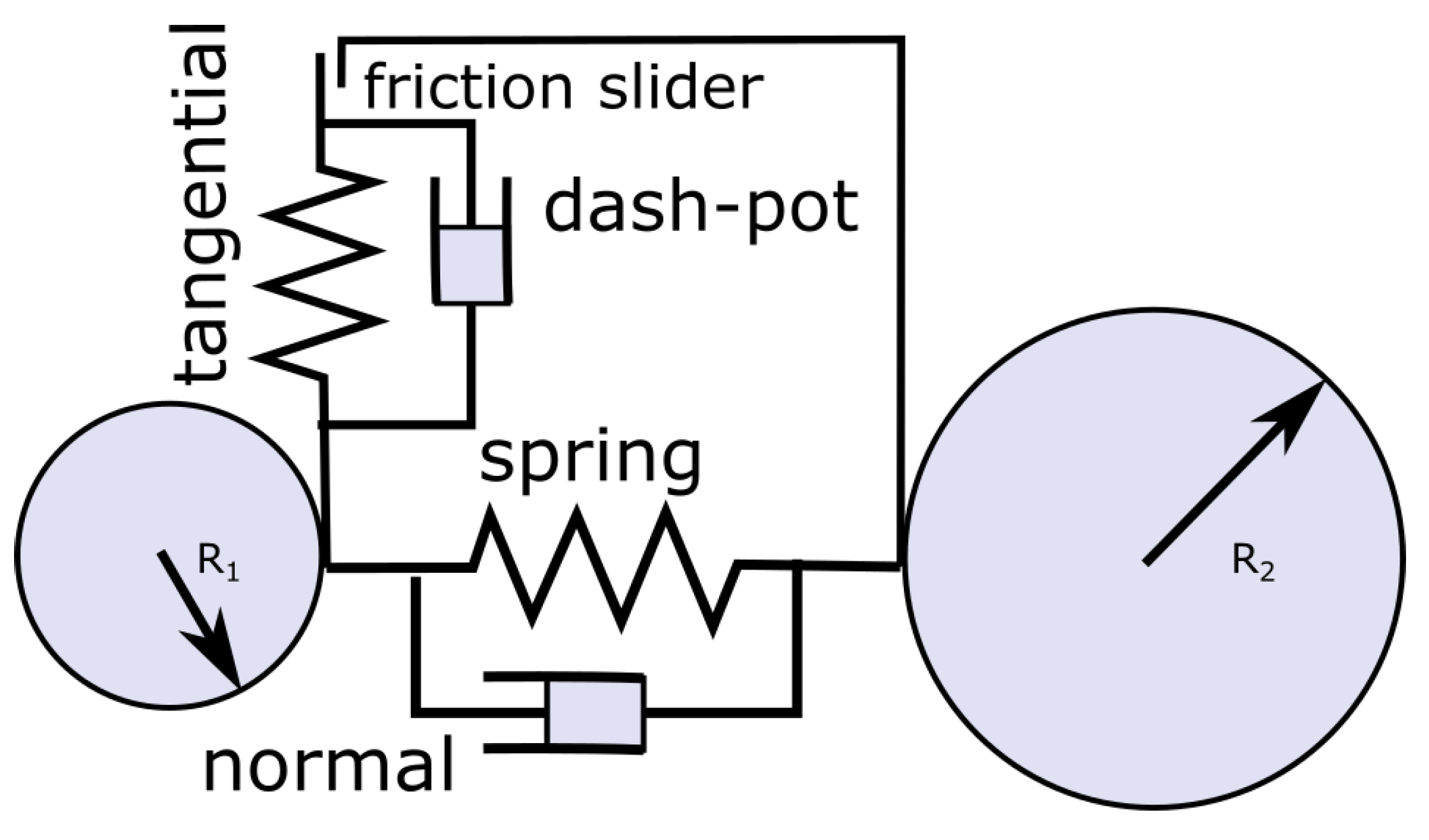
2.1. Particle Flow Model
2.2. Liquid Bridge Model
Liquid Loading, Bridge Volume Fraction & Liquid Bridge Coordination Number
2.3. Simulation Set-Up and Input Parameters
2.3.1. Simple Periodic Simulation Box
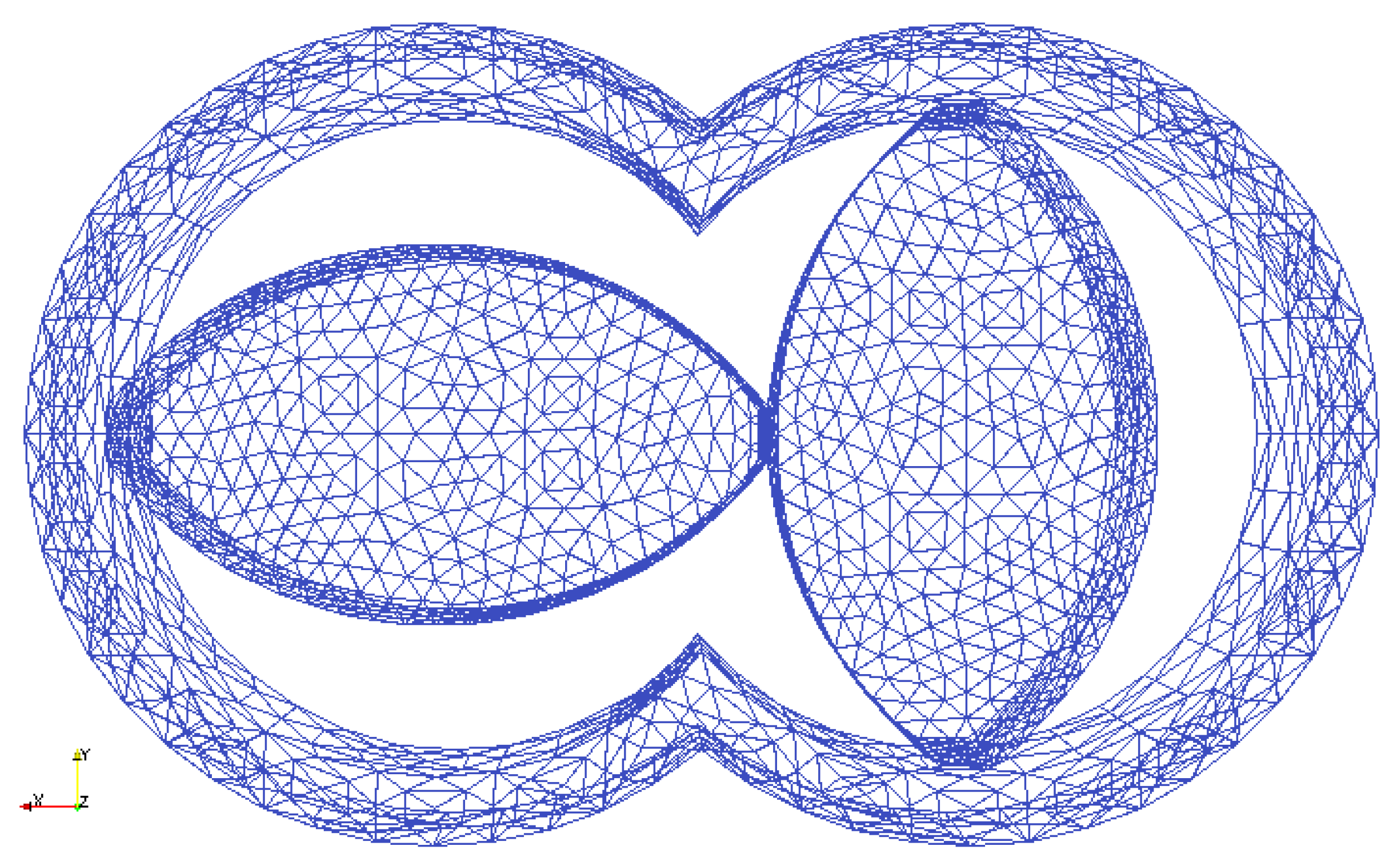
2.3.2. Mixing Zone of a TSG
3. Results and Discussion
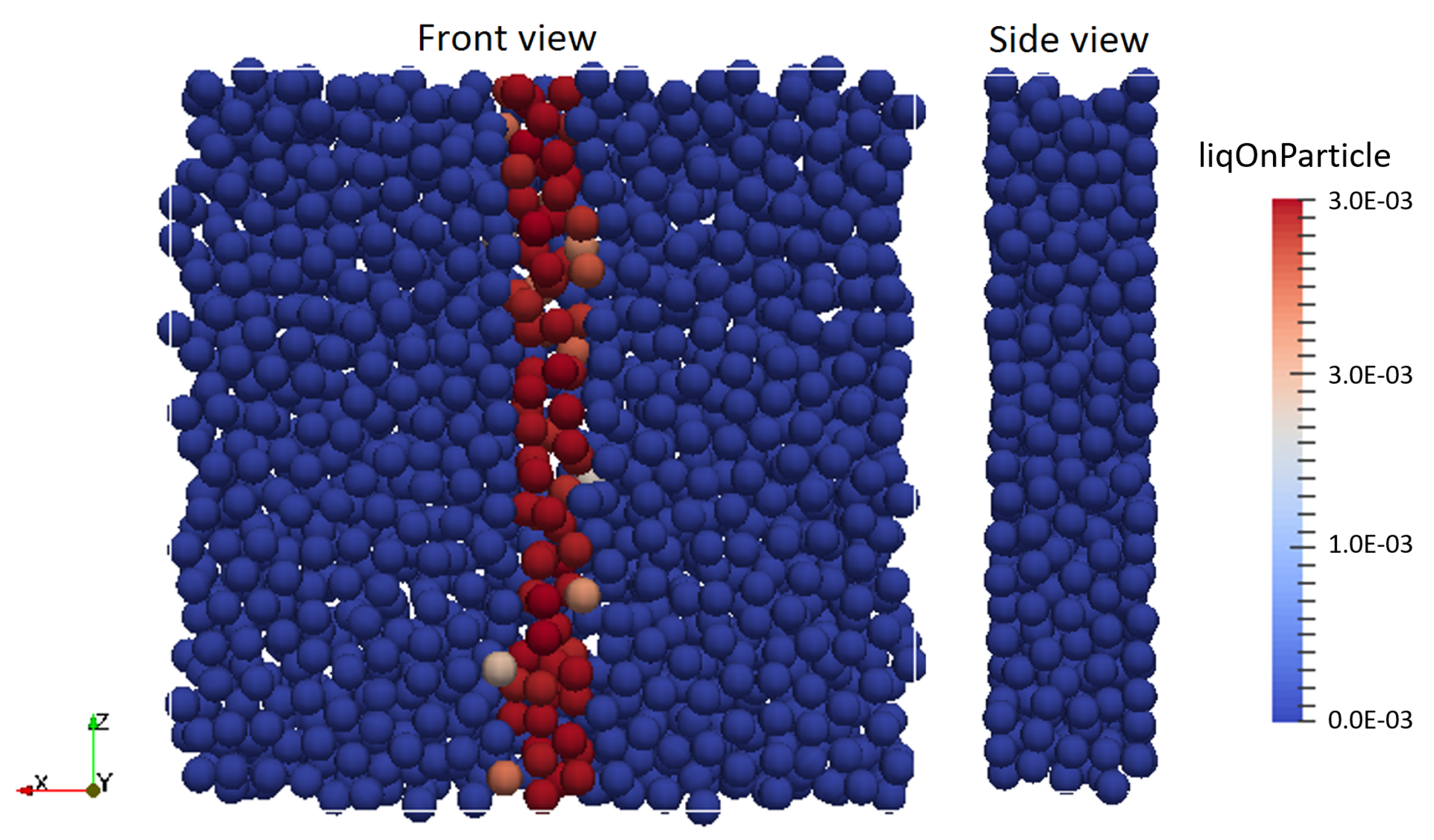
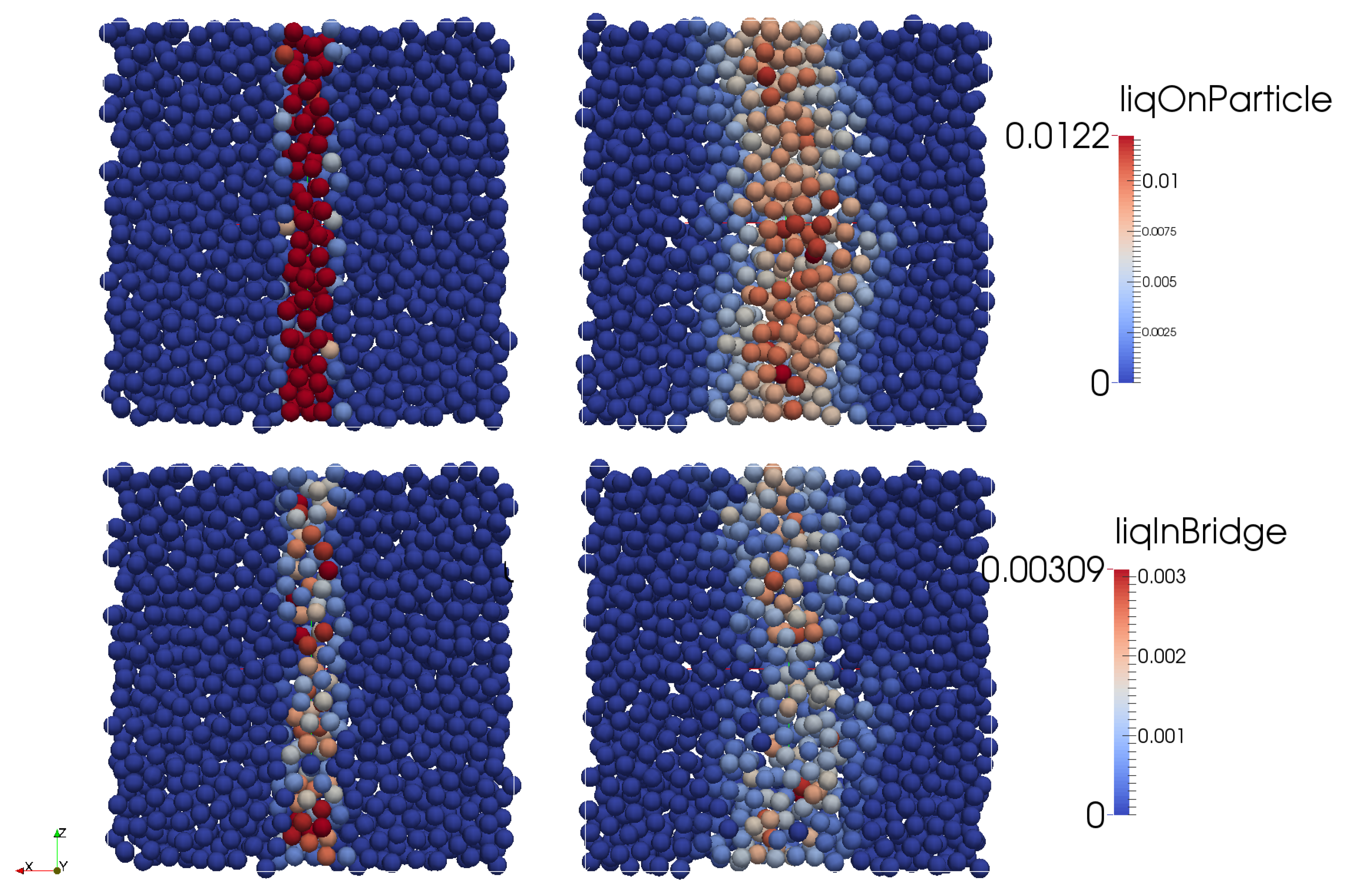
3.1. Solid-Liquid Mixing in the Simple Periodic Simulation Box
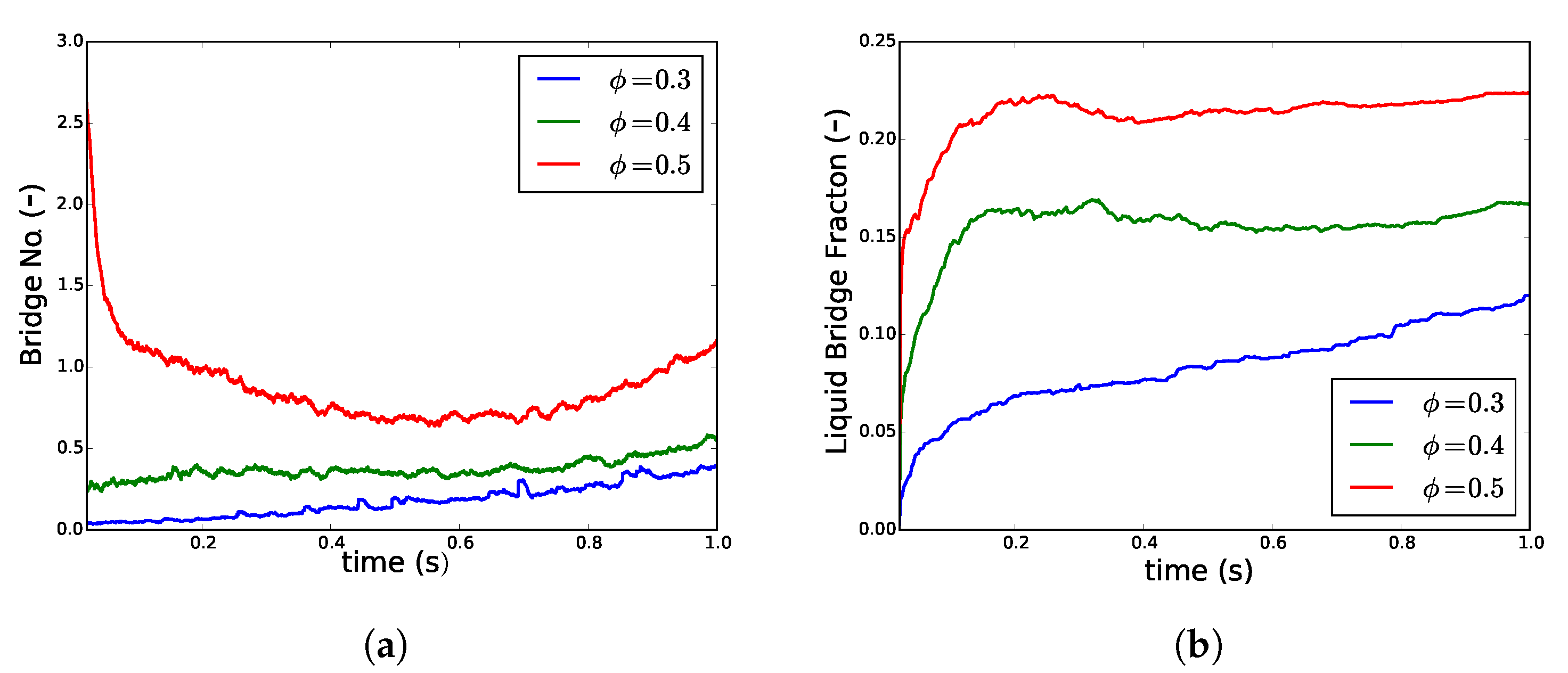
3.1.1. Effect of Change in Volume Fraction of Particles
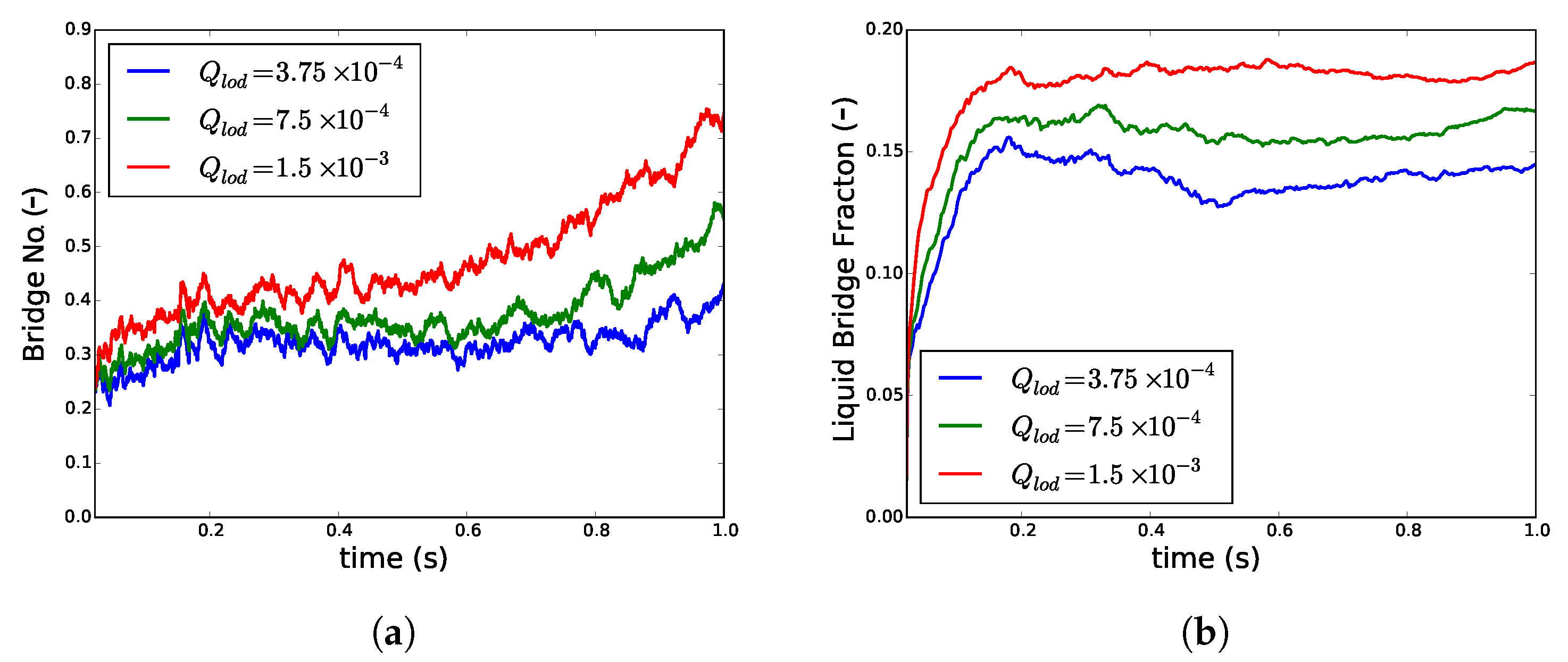
3.1.2. Effect of Change in Liquid Loading on Particles
3.1.3. Effect of Change in Liquid Addition Zone Width
3.2. Solid-Liquid Mixing in the Mixing Zone of a TSG
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| List of Acronyms | |
| DEM | discrete element method. |
| HSWG | high shear wet granulation. |
| PBE | population balance equation. |
| PBM | population balance model. |
| TSG | twin-screw granulator. |
| List of Symbols | |
| Characteristic contact time . | |
| Dimensionless filling rate coefficient . | |
| Normal overlap between particles i and j [m]. | |
| Particle diameter . | |
| Dimensionless reference film thickness . | |
| Normal damping coefficient . | |
| Normal coefficient of restitution . | |
| Tangential damping coefficient . | |
| body force of a particle i . | |
| Cohesion force between particle i and j . | |
| Contact force between particle i and j . | |
| Normal component of force acting on particle i . | |
| Tangential component of force acting on particle i . | |
| Shear rate . | |
| Scaled shear rate . | |
| Dimensional reference film thickness [m]. | |
| Normal spring stiffness . | |
| Tangential spring stiffness . | |
| Volume of liquid present on the particle . | |
| Reference liquid content on the particles . | |
| Effective mass of the particle [kg]. | |
| Dynamic viscosity of liquid . | |
| Number of liquid bridge connected to particle i . | |
| Number of particles . | |
| Number of particles in the liquid addition region . | |
| Unit normal vector . | |
| Eigen frequency of damped harmonic oscillator . | |
| Volume fraction of particles . | |
| Fraction of liquid on the surface that is transferred into the bridge . | |
| Liquid addition rate to particle i in the liquid addition region . | |
| Dimensionless liquid load per particle . | |
| Liquid transfer rate for particle . | |
| r | Radius of the particle . |
| Position vector of the particle . | |
| Effective radius of the particle . | |
| Density of the particles . | |
| Surface tension of liquid . | |
| Liquid addition time . | |
| Reference liquid bridge filling time [s]. | |
| Tangential overlap between particles i and j . | |
| Liquid bridge volume . | |
| Liquid bridge fraction . | |
| Normal relative particle velocity components . | |
| Tangential relative particle velocity components . | |
| Average number of liquid bridges per particle . | |
References
- Kumar, A.; Gernaey, K.V.; De Beer, T.; Nopens, I. Model-based analysis of high shear wet granulation from batch to continuous processes in pharmaceutical production—A critical review. Eur. J. Pharm. Biopharm. 2013, 85, 814–832. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kumar, A.; Gernaey, K.V.; De Beer, T.; Nopens, I. Model-based characterisation of twin-screw granulation system for continuous solid dosage manufacturing. Comput. Aided Chem. Eng. 2015, 37, 2165–2170. [Google Scholar]
- Barrasso, D.; Eppinger, T.; Pereira, F.E.; Aglave, R.; Debus, K.; Bermingham, S.K.; Ramachandran, R. A multi-scale, mechanistic model of a wet granulation process using a novel bi-directional PBM-DEM coupling algorithm. Chem. Eng. Sci. 2015, 123, 500–513. [Google Scholar] [CrossRef]
- Lian, G.P.; Thornton, C.; Adams, M.J. Discrete particle simulation of agglomerate impact coalescence. Chem. Eng. Sci. 1998, 53, 3381–3391. [Google Scholar] [CrossRef]
- McCarthy, J. Micro-modeling of cohesive mixing processes. Powder Technol. 2003, 138, 63–67. [Google Scholar] [CrossRef]
- Sen, M.; Singh, R.; Vanarase, A.; John, J.; Ramachandran, R. Multi-dimensional population balance modeling and experimental validation of continuous powder mixing processes. Chem. Eng. Sci. 2012, 80, 349–360. [Google Scholar] [CrossRef]
- Barrasso, D.; Hagrasy, A.E.; Litster, J.D.; Ramachandran, R. Multi-dimensional population balance model development and validation for a twin screw granulation process. Powder Technol. 2015, 270, 612–621. [Google Scholar] [CrossRef]
- Sarkar, A.; Wassgren, C.R. Simulation of a continuous granular mixer: Effect of operating conditions on flow and mixing. Chem. Eng. Sci. 2009, 64, 2672–2682. [Google Scholar] [CrossRef]
- Gantt, J.A.; Cameron, I.T.; Litster, J.D.; Gatzke, E.P. Determination of coalescence kernels for high-shear granulation using DEM simulations. Powder Technol. 2006, 170, 53–63. [Google Scholar] [CrossRef]
- Goldschmidt, M.J.V.; Weijers, G.G.C.; Boerefijn, R.; Kuipers, J.A.M. Discrete element modelling of fluidised bed spray granulation. Powder Technol. 2003, 138, 39–45. [Google Scholar] [CrossRef] [Green Version]
- Bouffard, J.; Bertrand, F.; Chaouki, J. A multiscale model for the simulation of granulation in rotor-based equipment. Chem. Eng. Sci. 2012, 81, 106–117. [Google Scholar] [CrossRef]
- Reinhold, A.; Briesen, H. Numerical behavior of a multiscale aggregation models—Coupling population balances and discrete element models. Chem. Eng. Sci. 2012, 70, 165–175. [Google Scholar] [CrossRef]
- Dhenge, R.M.; Washino, K.; Cartwright, J.J.; Hounslow, M.J.; Salman, A.D. Twin screw granulation using conveying screws: Effects of viscosity of granulation liquids and flow of powders. Powder Technol. 2013, 238, 77–90. [Google Scholar] [CrossRef]
- Zheng, C.; Zhang, L.; Govender, N.; Wu, C.Y. DEM analysis of residence time distribution during twin screw granulation. Powder Technol. 2021, 377, 924–938. [Google Scholar] [CrossRef]
- Vercruysse, J.; Toiviainen, M.; Fonteyne, M.; Helkimo, N.; Ketolainen, J.; Juuti, M.; Delaet, U.; Assche, I.V.; Remon, J.P.; Vervaet, C.; et al. Visualization and understanding of the granulation liquid mixing and distribution during continuous twin screw granulation using NIR chemical imaging. Eur. J. Pharm. Biopharm. 2013, 86, 383–392. [Google Scholar] [CrossRef] [PubMed]
- Tamrakar, A.; Chen, S.W.; Ramachandran, R. A DEM model-based study to quantitatively compare the effect of wet and dry binder addition in high-shear wet granulation processes. Chem. Eng. Res. Des. 2019, 142, 307–326. [Google Scholar] [CrossRef]
- Kumar, A.; Alakarjula, M.; Vanhoorne, V.; Toiviainen, M.; De Leersnyder, F.; Vercruysse, J.; Juuti, M.; Ketolainen, J.; Vervaet, C.; Remon, J.P.; et al. Linking granulation performance with residence time and granulation liquid distributions in twin-screw granulation: An experimental investigation. Eur. J. Pharm. Sci. 2016, 90, 25–37. [Google Scholar] [CrossRef]
- Kloss, C.; Goniva, C.; Hager, A.; Amberger, S.; Pirker, S. Models, algorithms and validation for opensource DEM and CFD–DEM. Prog. Comput. Fluid Dyn. Int. J. 2012, 12, 140–152. [Google Scholar] [CrossRef]
- Litster, J.; Ennis, B. The Science and Engineering of Granulation Processes; Springer: Berlin, Germany, 2004; Volume 15. [Google Scholar]
- Mikami, T.; Kamiya, H.; Horio, M. Numerical simulation of cohesive powder behavior in a fluidized bed. Chem. Eng. Sci. 1998, 53, 1927–1940. [Google Scholar] [CrossRef]
- Mohan, B.; Kloss, C.; Khinast, J.; Radl, S. Regimes of liquid transport through sheared beds of inertial smooth particles. Powder Technol. 2014, 264, 377–395. [Google Scholar] [CrossRef]
- Lees, A.; Edwards, S. The computer study of transport processes under extreme conditions. J. Phys. C 1972, 5, 1921. [Google Scholar] [CrossRef]
- Chialvo, S.; Sun, J.; Sundaresan, S. Bridging the rheology of granular flows in three regimes. Phys. Rev. E 2012, 85, 021305. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perkins, M.; Ebbens, S.J.; Hayes, S.; Roberts, C.J.; Madden, C.E.; Luk, S.Y.; Patel, N. Elastic modulus measurements from individual lactose particles using atomic force microscopy. Int. J. Pharm. 2007, 332, 168–175. [Google Scholar] [CrossRef] [PubMed]
- LIGGGHTS v3.X Documentation—Gran Model Hooke Model. Available online: https://www.cfdem.com/media/DEM/docu/gran_model_hooke.html (accessed on 19 June 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Symbol | Value | Unit |
|---|---|---|---|
| Particle diameter | 1.00E-03 | [m] | |
| Young’s modulus | G | 3.45E+9 | [N/m2] |
| Initial particle velocity | , | 1, 0.1 | [m/s] |
| Coefficient of restitution | 0.9 | [–] | |
| Coefficient of friction | µ | 0.1 | [–] |
| Poisson ratio | 0.33 | [–] | |
| Film thickness | / | 1.00E-02 | [–] |
| Dimensionless filling rate coefficient | 1 | [–] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, A.; Radl, S.; Gernaey, K.V.; De Beer, T.; Nopens, I. Particle-Scale Modeling to Understand Liquid Distribution in Twin-Screw Wet Granulation. Pharmaceutics 2021, 13, 928. https://doi.org/10.3390/pharmaceutics13070928
Kumar A, Radl S, Gernaey KV, De Beer T, Nopens I. Particle-Scale Modeling to Understand Liquid Distribution in Twin-Screw Wet Granulation. Pharmaceutics. 2021; 13(7):928. https://doi.org/10.3390/pharmaceutics13070928
Chicago/Turabian StyleKumar, Ashish, Stefan Radl, Krist V. Gernaey, Thomas De Beer, and Ingmar Nopens. 2021. "Particle-Scale Modeling to Understand Liquid Distribution in Twin-Screw Wet Granulation" Pharmaceutics 13, no. 7: 928. https://doi.org/10.3390/pharmaceutics13070928
APA StyleKumar, A., Radl, S., Gernaey, K. V., De Beer, T., & Nopens, I. (2021). Particle-Scale Modeling to Understand Liquid Distribution in Twin-Screw Wet Granulation. Pharmaceutics, 13(7), 928. https://doi.org/10.3390/pharmaceutics13070928