Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
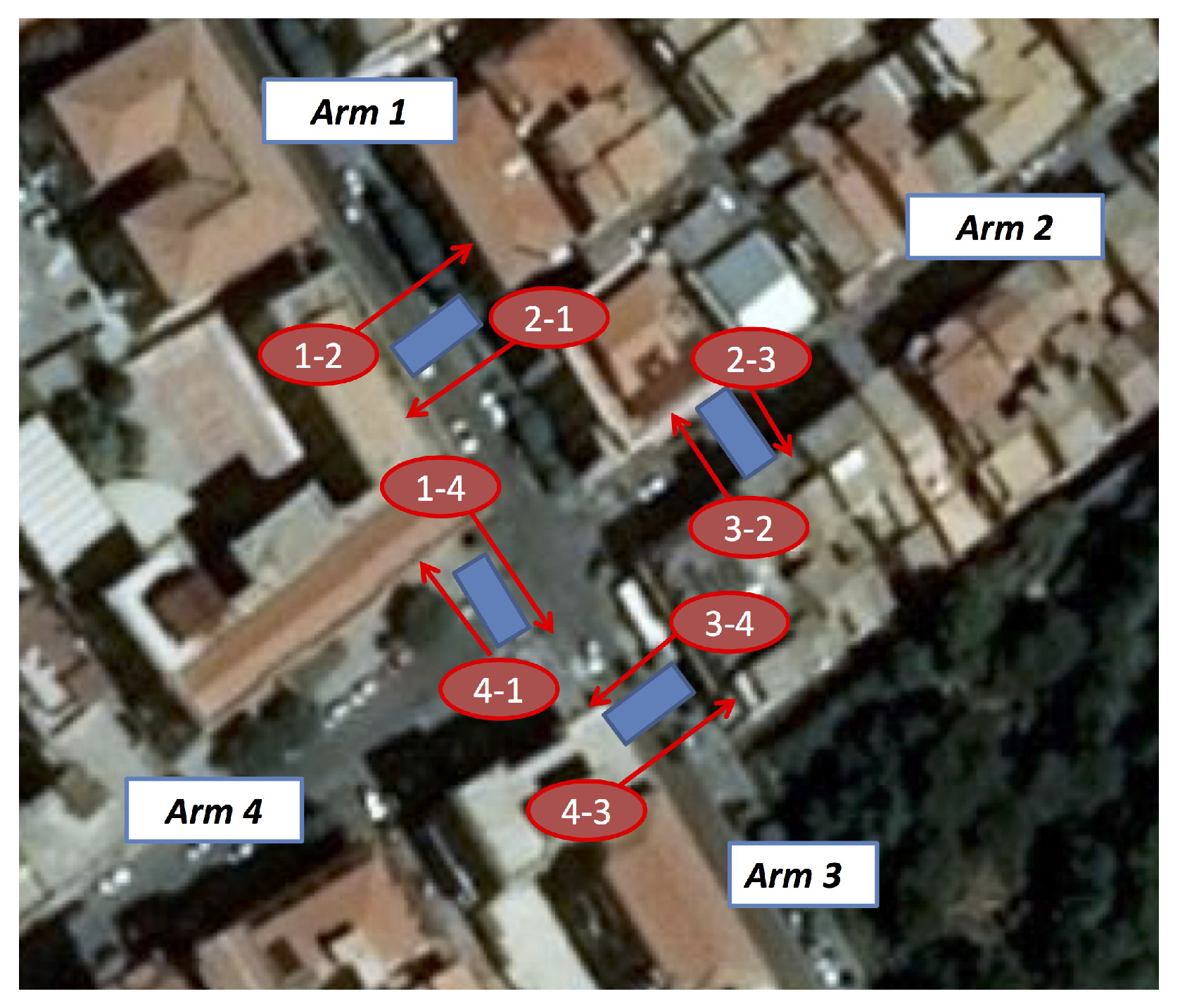
2. The Analyzed Scenario
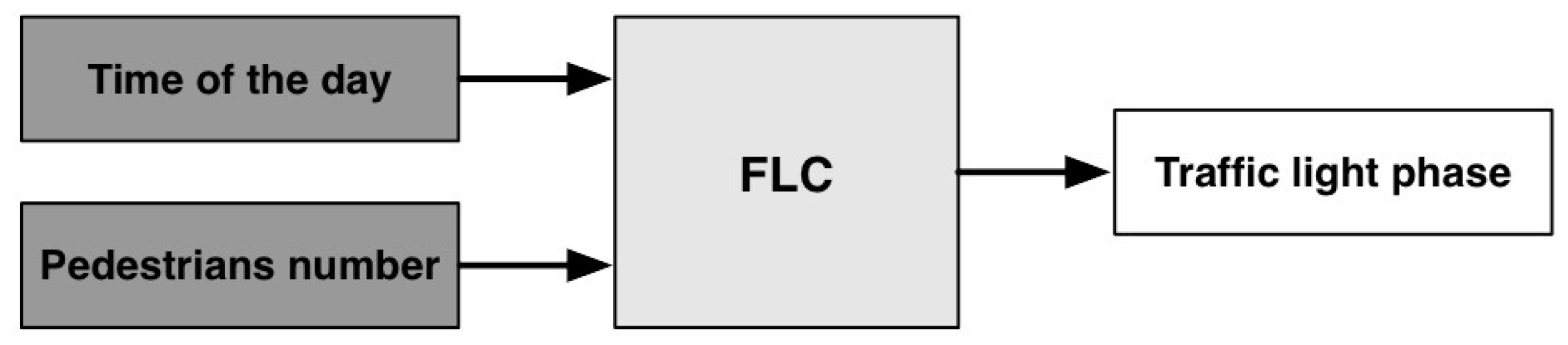
3. The Proposed Fuzzy Logic Controller
- 07:00 a.m. ÷ 09:00 a.m.;
- 01:00 p.m. ÷ 02:00 p.m.;
- 05:00 p.m. ÷ 06:00 p.m.
4. Performance Evaluation
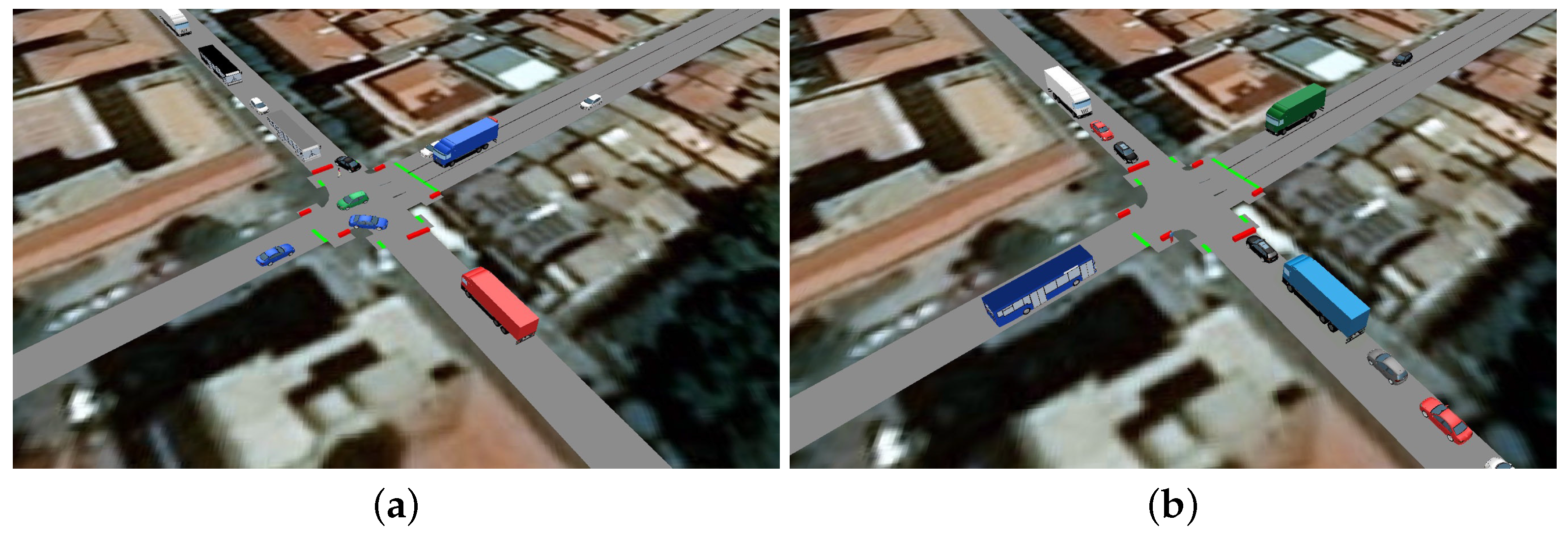
4.1. Simulation Model
- dm (m/s): the maximum deceleration during the pedestrian-vehicle conflict period;
- PET (s): post-encroachment time for the pedestrian-vehicle conflict;
- TTCmin (s): the minimum time to collision during the pedestrian-vehicle conflict period.
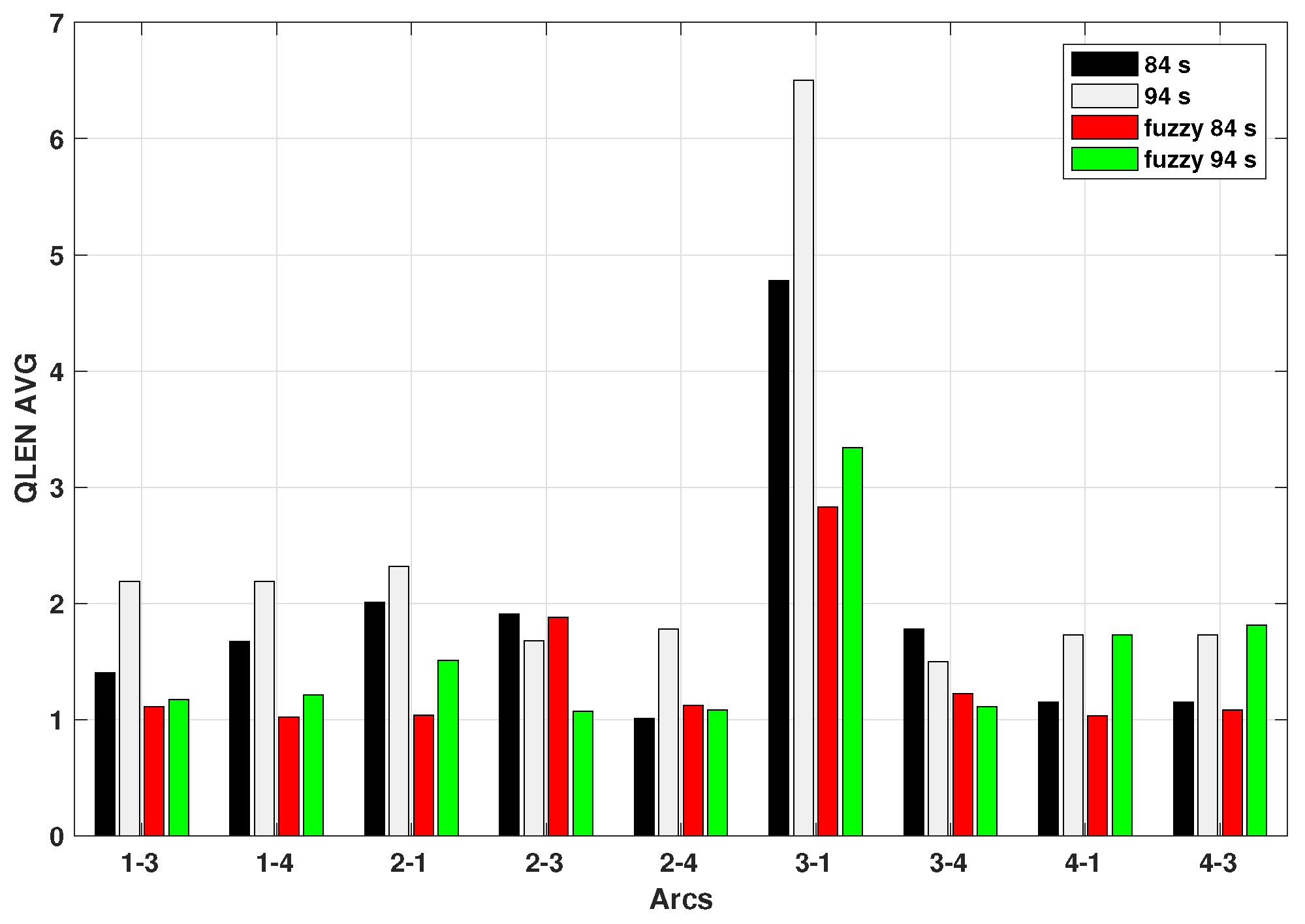
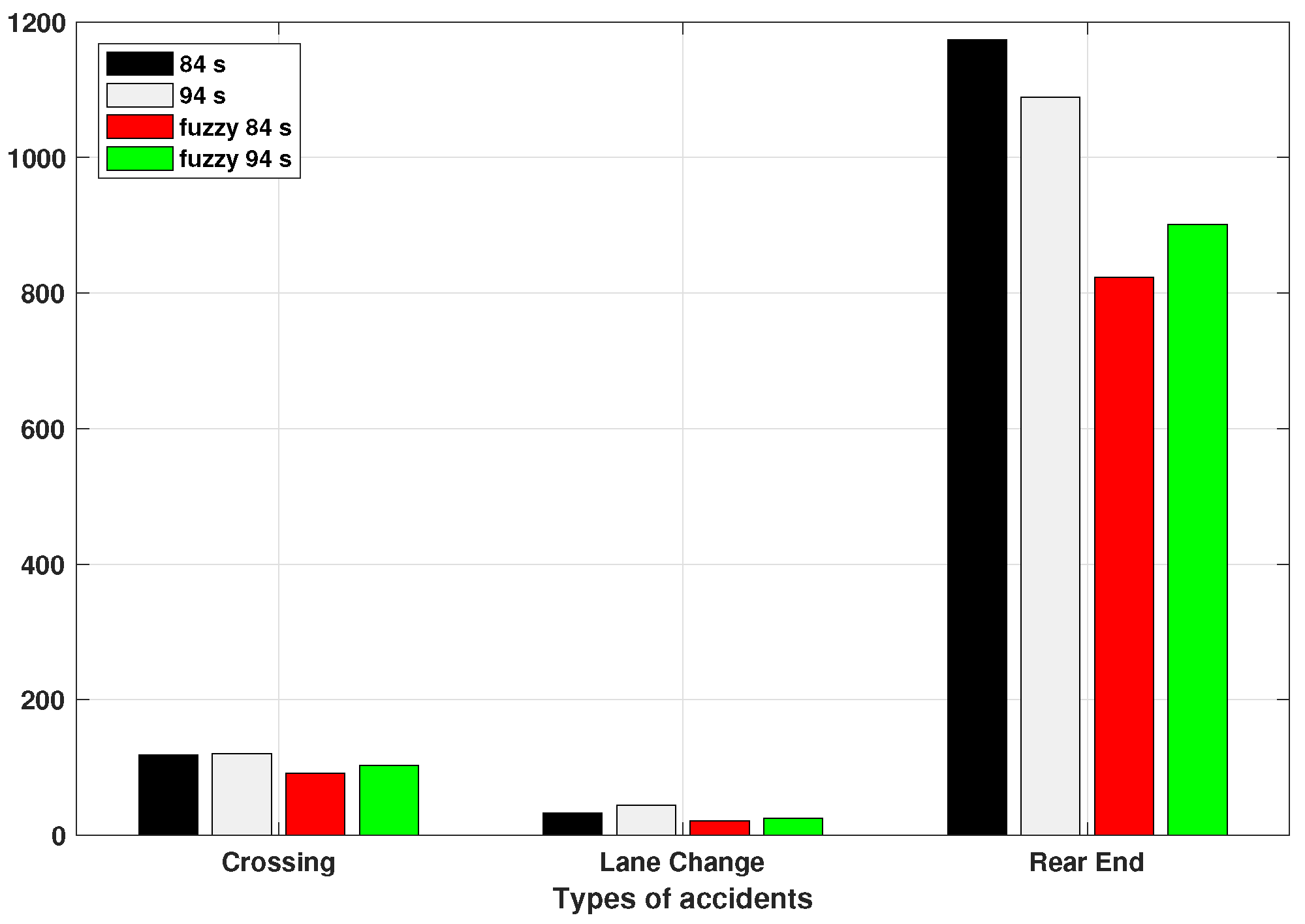
4.2. Simulation Results
- 07:00 a.m. ÷ 09:00 a.m.;
- 01:00 p.m. ÷ 02:00 p.m.;
- 05:00 p.m. ÷ 06:00 p.m.
- Read end;
- Crossing;
- Changing lanes.
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Perera, C.; Liu, C.H.; Jayawardena, S. The Emerging Internet of Things Marketplace from an Industrial Perspective: A Survey. IEEE Trans. Emerg. Top. Comput. 2015, 3, 585–598. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Alnahdi, A.; Liu, S.H. Mobile Internet of Things (MIoT) and Its Applications for Smart Environments: A Positional Overview. In Proceedings of the 2017 IEEE International Congress on Internet of Things (ICIOT), Honolulu, HI, USA, 25–30 June 2017; pp. 151–154. [Google Scholar]
- Park, E.; Cho, Y.; Han, J.; Kwon, S.J. Comprehensive Approaches to User Acceptance of Internet of Things in a Smart Home Environment. IEEE Internet Things J. 2017, 4, 2342–2350. [Google Scholar] [CrossRef]
- Wollschlaeger, M.; Sauter, T.; Jasperneite, J. The Future of Industrial Communication: Automation Networks in the Era of the Internet of Things and Industry 4.0. IEEE Ind. Electron. Mag. 2017, 11, 17–27. [Google Scholar] [CrossRef]
- Laplante, P.A.; Laplante, N. The Internet of Things in Healthcare: Potential Applications and Challenges. IT Prof. 2016, 18, 2–4. [Google Scholar] [CrossRef]
- Hernández-Muñoz, J.M.; Vercher, J.B.; Muñoz, L.; Galache, J.A.; Presser, M.; Hernández Gómez, L.A.; Pettersson, J. Smart Cities at the Forefront of the Future Internet. In The Future Internet: Future Internet Assembly 2011: Achievements and Technological Promises; Springer: Berlin/Heidelberg, Germany, 2011; pp. 447–462. [Google Scholar]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Carrino, F.; Mugellini, E.; Abou Khaled, O.; Ouerhani, N.; Ehrensberger, J. iNUIT: Internet of Things for Urban Innovation. Future Internet 2016, 8, 18. [Google Scholar] [CrossRef]
- Ray, P. A survey on Internet of Things architectures. J. King Saud Univ. Comput. Inf. Sci. 2016. [Google Scholar] [CrossRef]
- Branchi, P.E.; Fernandez-Valdivielso, C.; Matias, I.R. Analysis Matrix for Smart Cities. Future Internet 2014, 6, 61–75. [Google Scholar] [CrossRef]
- Yeh, H. The effects of successful ICT-based smart city services: From citizens’ perspectives. Gov. Inf. Q. 2017, 34, 556–565. [Google Scholar] [CrossRef]
- Cicirelli, F.; Guerrieri, A.; Spezzano, G.; Vinci, A. An edge-based platform for dynamic Smart City applications. Future Gener. Comput. Syst. 2017, 76, 106–118. [Google Scholar] [CrossRef]
- Ghannem, A.; Hamdi, M.S.; Abdelmoez, W.; Ammar, H.H. A context model development process for smart city operations. In Proceedings of the 2015 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Hammamet, Tunisia, 15–17 November 2015; pp. 122–127. [Google Scholar]
- Chourabi, H.; Nam, T.; Walker, S.; Gil-Garcia, J.R.; Mellouli, S.; Nahon, K.; Pardo, T.A.; Scholl, H.J. Understanding Smart Cities: An Integrative Framework. In Proceedings of the 2012 45th Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2012; pp. 2289–2297. [Google Scholar]
- Hill, N.; Gibson, G.; Guidorzi, E.; Amaral, S.; Parlikad, A.K.; Jin, Y. Scoping Study into Deriving Transport Benefits from Big Data and the Internet of Things in Smart Cities; Technical Report; Department for Transport, University of Cambridge: Cambridge, UK, 2017. [Google Scholar]
- Ho, T.J.; Chung, M.J. Information-Aided Smart Schemes for Vehicle Flow Detection Enhancements of Traffic Microwave Radar Detectors. Appl. Sci. 2016, 6, 196. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, L.; Qin, Y. Level-of-Service Based Hierarchical Feedback Control Method of Network-Wide Pedestrian Flow. Math. Probl. Eng. 2016, 2016, 14. [Google Scholar] [CrossRef]
- Salvo, G.; Caruso, L.; Scordo, A.; Guido, G.; Vitale, A. Traffic data acquirement by unmanned aerial vehicle. Eur. J. Remote Sens. 2017, 50, 343–351. [Google Scholar] [CrossRef]
- Knoop, V.; Daganzo, C. The Effect of Pedestrian Crossings on Traffic Flow. In Proceedings of the 96th Annual Meeting Transportation Research Board, Washington, DC, USA, 7–11 January 2017. [Google Scholar]
- Zhang, H.; Zhang, C.; Wei, Y.; Chen, F. The effects of mobile phone use on pedestrian crossing behavior and safety at unsignalized intersections. In Proceedings of the 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 280–285. [Google Scholar]
- Giuffre, T.; Campisi, T.; Tesoriere, G. Implications of Adaptive Traffic Light Operations on Pedestrian Safety. IOSR J. Mech. Civ. Eng. 2017, 13, 58–63. [Google Scholar]
- Hernandez, D.C.; Filonenko, A.; Seo, D.; Jo, K.H. Crosswalk detection based on laser scanning from moving vehicle. In Proceedings of the IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 1515–1519. [Google Scholar]
- Zhai, Y.; Cui, G.; Gu, Q.; Kong, L. Crosswalk Detection Based on MSER and ERANSAC. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 2770–2775. [Google Scholar]
- Choi, J.; Ahn, B.T.; Kweon, I.S. Crosswalk and traffic light detection via integral framework. In Proceedings of the 19th Korea-Japan Joint Workshop on Frontiers of Computer Vision, Incheon, Korea, 30 January–1 February 2013; pp. 309–312. [Google Scholar]
- Muralidharan, A.; Coogan, S.; Flores, C.; Varaiya, P. Management of intersections with multi-modal high-resolution data. Transp. Res. Part C Emerg. Technol. 2016, 68, 101–112. [Google Scholar] [CrossRef]
- Song, C.; Kim, I.; Xiang, Q. Evaluation of Large Signalized Intersection with New Pedestrians Twice Crossing. Procedia Comput. Sci. 2017, 109, 132–139. [Google Scholar] [CrossRef]
- Collotta, M.; Bello, L.L.; Pau, G. A novel approach for dynamic traffic lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers. Expert Syst. Appl. 2015, 42, 5403–5415. [Google Scholar] [CrossRef]
- Odeh, S.M. Hybrid algorithm: Fuzzy Logic-Genetic Algorithm on traffic light intelligent system. In Proceedings of the 2015 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Istanbul, Turkey, 2–5 August 2015; pp. 1–7. [Google Scholar]
- Moghaddam, M.J.; Hosseini, M.; Safabakhsh, R. Traffic light control based on fuzzy Q-leaming. In Proceedings of the 2015 International Symposium on Artificial Intelligence and Signal Processing (AISP), Mashhad, Iran, 3–5 March 2015; pp. 124–128. [Google Scholar]
- Galatioto, F.; Giuffre, T.; Bell, M.; Tesoriere, G.; Campisi, T. Traffic Microsimulation Model to Predict Variability of Red-Light Running Influenced by Traffic Light Operations in Urban Area. Procedia Soc. Behav. Sci. 2012, 53, 871–879. [Google Scholar] [CrossRef]
- Kilambi, P.; Ribnick, E.; Joshi, A.J.; Masoud, O.; Papanikolopoulos, N. Estimating pedestrian counts in groups. Comput. Vis. Image Underst. 2008, 110, 43–59. [Google Scholar] [CrossRef]
- Planung Transport Verkehr AG. VISSIM 5.40 User Manual; PTV AG: Karlsruhe, Germany, 2012. [Google Scholar]
- Aghabayk, K.; Sarvi, M.; Young, W. A State-of-the-Art Review of Car-Following Models with Particular Considerations of Heavy Vehicles. Transp. Rev. 2015, 35, 82–105. [Google Scholar] [CrossRef]
- Transportation Research Board. Highway Capacity Manual; Transportation Research Board, National Research Council: Washington, DC, USA, 2000. [Google Scholar]
- Bennett, S.; Felton, A.; Akçelik, R. Pedestrian movement characteristics at signalised intersections. In Proceedings of the XXIII Australian Institutes of Transport Research, Melbourne, Australia, 10–12 December 2001. [Google Scholar]
- Fitzpatrick, K.; Turner, S.; Brewer, M.; Carlson, P.; Ullman, B.; Trout, N.; Park, E.; Whitacre, J.; Lalani, N.; Lord, D. Improving Pedestrian Safety at Unsignalized Crossings; Nchrp Report 562; Transportation Research Board: Washington, DC, USA, 2006. [Google Scholar]
- Allen, B.; Shin, B.; Cooper, D. Analysis of traffic conflicts and collision. Transp. Res. Rec. 1978, 667, 67–74. [Google Scholar]
- Hayward, J. Near Miss Determination through Use of a Scale of Danger; Number No. 7115 in Near Miss Determination through Use of a Scale of Danger; Pennsylvania Transportation and Traffic Safety Center, The Pennsylvania State University: State College, PA, USA, 1972. [Google Scholar]
- Archer, J. Indicators for Traffic Safety Assessment and Prediction and Their Application in Micro-Simulation Modelling: A Study of Urban and Suburban Intersections. Ph.D. Thesis, KTHKTH, Traffic and Logistics, Centre for Traffic Research, CTR, Royal Institute of Technology, Stockholm, Sweden, 2005. [Google Scholar]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S.G. Surrogate Safety Assessment Model and Validation: Final Report; Report fhwa hrt 08-051; Federal Highway Administration: Washington, DC, USA, 2008.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arm 1 | Arm 2 | Arm 3 | Arm 4 | |
|---|---|---|---|---|
| Arm 1 | 0% | 0% | 40% | 60% |
| Arm 2 | 60% | 0% | 14% | 26% |
| Arm 3 | 60% | 0% | 0% | 40% |
| Arm 4 | 30% | 0% | 70% | 0% |
| Arm 1 | Arm 2 | Arm 3 | Arm 4 | |
|---|---|---|---|---|
| Arm 1 | 0% | 20% | 50% | 30% |
| Arm 2 | 30% | 0% | 20% | 50% |
| Arm 3 | 50% | 30% | 0% | 20% |
| Arm 4 | 30% | 0% | 50% | 20% |
| Membership Function | Green Time (s) | Yellow Time (s) | Red Time (s) |
|---|---|---|---|
| 84 s cycle | |||
| Low | 30 | 5 | 49 |
| Medium | 40 (i.e., about +33%) | 5 | 39 |
| High | 50 (i.e., about +66%) | 5 | 29 |
| 94 s cycle | |||
| Low | 20 | 5 | 64 |
| Medium | 45 (i.e., about +125%) | 5 | 44 |
| High | 55 (i.e., about +170%) | 5 | 34 |
| Rule | Time of the Day | Pedestrians Number | Traffic Light Phase |
|---|---|---|---|
| 1 | Critical | Low | Medium |
| 2 | Critical | Medium | Medium |
| 3 | Critical | High | High |
| 4 | Not Critical | Low | Low |
| 5 | Not Critical | Medium | Medium |
| 6 | Not Critical | High | High |
| O/D | Arcs | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1-3 | 1-4 | 2-1 | 2-3 | 2-4 | 3-1 | 3-4 | 4-1 | 4-1 | ||
| Nodes | 1 | 1 | 1 | −1 | 0 | 0 | −1 | 0 | −1 | 0 |
| 2 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | |
| 3 | −1 | 0 | 0 | −1 | 0 | 1 | 1 | 0 | −1 | |
| 4 | 0 | −1 | 0 | 0 | −1 | 0 | −1 | 1 | 1 | |
| Parameter | Units of Measurement |
|---|---|
| Vehicle flow | veh/h |
| Queue length | m |
| Delay | s |
| Speed variation | m/s or km/h |
| Acceleration variation | m/s or km/h |
| Stop number | unit |
| Parameter | Description | Units of Measurement | |
|---|---|---|---|
| Pedestrian number variation | PEDENT(ALL) | Pedestrians inserted in the network | ped/s |
| PEDARR(ALL) | Pedestrians have arrived at their destination before the end of the simulation | ped/s | |
| PEDACT(ALL) | Pedestrians within the network once the simulation is over. Pedestrians that have not arrived (PEDARR) | ped/s | |
| DENSAVG(ALL) | Average pedestrian density | Ratio of all pedestrians in the network to pedestrians in pedestrian areas | |
| Pedestrian flow | FLOWAVG(ALL) | Average flow given by the product between the average current speed on all pedestrians and the current density | ped/s |
| FLOWTODESTAVG(ALL) | Flow in the direction of the average destination given by the product between the current velocity and the total current density taking into account the static potential in the position of each pedestrian | ped/m | |
| TRAVTMAVG(ALL) | Average travel time of pedestrians who are in the network or have already been removed from the network | s | |
| Speed | SPEEDTODESTAVG(ALL) | Speed in the direction of the destination | km/h |
| NORMSPEEDAVG(ALL) | Average normalized speed given by the ratio between the actual speed and the desired speed averaged between all pedestrians and time steps | km/h | |
| SPEEDAVG(ALL) | Average speed | km/h | |
| Stops | STOPSAVG(ALL) | Average number of stops per pedestrian | Ratio between the total number of stops and the sum between the number of pedestrians in the network and the number of pedestrians that have arrived |
| STOPTMAVG(ALL) | Average duration of the stop | s | |
| Traffic Light Cycle 84 s | Traffic Light Cycle 94 s | |||||||
|---|---|---|---|---|---|---|---|---|
| Arcs | VEHS | QLEN AVG | QLEN MAX | STOPS | VEHS | QLEN AVG | QLEN MAX | STOPS |
| 1-3 | 100 | 14.14 | 104.82 | 0.73 | 100 | 24.19 | 109.24 | 0.91 |
| 1-4 | 151 | 14.14 | 104.82 | 0.75 | 152 | 24.19 | 109.24 | 0.96 |
| 2-1 | 145 | 3.39 | 59.38 | 0.52 | 145 | 2.32 | 55.00 | 0.39 |
| 2-4 | 63 | 1.21 | 28.96 | 0.41 | 63 | 0.78 | 28.99 | 0.29 |
| 2-3 | 36 | 0.91 | 23.61 | 1.23 | 35 | 0.68 | 24.55 | 0.96 |
| 3-1 | 144 | 44.78 | 111.48 | 1.54 | 92 | 86.50 | 111.62 | 2.86 |
| 3-4 | 98 | 44.78 | 111.48 | 2.28 | 62 | 86.50 | 111.62 | 4.11 |
| 4-1 | 72 | 7.15 | 90.15 | 0.84 | 71 | 4.73 | 82.26 | 0.61 |
| 4-3 | 172 | 7.15 | 90.15 | 0.56 | 171 | 4.73 | 82.26 | 0.42 |
| Total for intersection | 981 | 15.29 | 111.48 | 0.98 | 891 | 26.07 | 111.62 | 1.28 |
| Traffic Light Cycle 84 s | Traffic Light Cycle 94 s | |||||||
|---|---|---|---|---|---|---|---|---|
| Arcs | VEHS | QLEN AVG | QLEN MAX | STOPS | VEHS | QLEN AVG | QLEN MAX | STOPS |
| 1-3 | 100 | 12.04 | 95.16 | 0.67 | 100 | 22.18 | 67.21 | 0.41 |
| 1-4 | 151 | 14.02 | 88.11 | 0.43 | 152 | 16.37 | 88.64 | 0.68 |
| 2-1 | 145 | 1.99 | 60.12 | 0.32 | 145 | 1.05 | 42.13 | 0.43 |
| 2-4 | 63 | 1.05 | 20.24 | 0.39 | 63 | 0.57 | 21.87 | 0.25 |
| 2-3 | 36 | 0.66 | 12.15 | 0.71 | 35 | 0.69 | 21.34 | 0.74 |
| 3-1 | 144 | 39.73 | 89.59 | 0.87 | 92 | 45.38 | 87.15 | 1.59 |
| 3-4 | 98 | 35.05 | 100.32 | 1.54 | 62 | 71.25 | 88.84 | 2.98 |
| 4-1 | 72 | 4.02 | 75.17 | 0.81 | 71 | 3.56 | 81.23 | 0.66 |
| 4-3 | 172 | 6.08 | 80.76 | 0.58 | 171 | 2.09 | 66.76 | 0.55 |
| Total for intersection | 981 | 12.73 | 100.32 | 0.70 | 891 | 18.13 | 88.84 | 0.92 |
| Traffic Light Cycle 84 s | Traffic Light Cycle 94 s | |||||||
|---|---|---|---|---|---|---|---|---|
| Arcs | Speed ped (m/s) | dm (m/s2) | QLEN AVG | STOPS | Speed ped (m/s) | dm (m/s2) | QLEN AVG | STOPS |
| 1-3 | 1.1 | 6.3 | 1.4 | 0.73 | 1.01 | 6.1 | 2.19 | 0.91 |
| 1-4 | 1.51 | 5.9 | 1.67 | 0.75 | 1.02 | 5.4 | 2.19 | 0.96 |
| 2-1 | 1.05 | 6.1 | 2.01 | 0.52 | 1.05 | 5.9 | 2.32 | 0.39 |
| 2-3 | 2.36 | 5.2 | 1.91 | 1.23 | 1.3 | 5 | 1.68 | 0.96 |
| 2-4 | 1.63 | 6.7 | 1.01 | 0.41 | 1.3 | 6.3 | 1.78 | 0.29 |
| 3-1 | 1.44 | 5.6 | 4.78 | 1.54 | 1.2 | 5 | 6.5 | 2.86 |
| 3-4 | 0.98 | 5.9 | 1.78 | 2.28 | 0.62 | 5.6 | 1.5 | 4.11 |
| 4-1 | 0.72 | 6 | 1.15 | 0.84 | 0.71 | 6 | 1.73 | 0.61 |
| 4-3 | 1.72 | 5.7 | 1.15 | 0.56 | 1.01 | 5.1 | 1.73 | 0.42 |
| Total for intersection | 1.39 | 5.93 | 1.87 | 0.98 | 1.02 | 5.60 | 2.40 | 1.28 |
| Traffic Light Cycle 84 s | Traffic Light Cycle 94 s | |||||||
|---|---|---|---|---|---|---|---|---|
| Arcs | Speed ped (m/s) | dm (m/s2) | QLEN AVG | STOPS | Speed ped (m/s) | dm (m/s2) | QLEN AVG | STOPS |
| 1-3 | 1.1 | 6.3 | 1.11 | 0.41 | 1.01 | 6.1 | 1.17 | 0.43 |
| 1-4 | 1.51 | 5.9 | 1.02 | 0.81 | 1.02 | 5.4 | 1.21 | 0.62 |
| 2-1 | 1.05 | 6.1 | 1.04 | 0.45 | 1.05 | 5.9 | 1.51 | 0.38 |
| 2-3 | 2.36 | 5.2 | 1.88 | 1.01 | 1.3 | 5 | 1.07 | 0.81 |
| 2-4 | 1.63 | 6.7 | 1.12 | 0.33 | 1.3 | 6.3 | 1.08 | 0.31 |
| 3-1 | 1.44 | 5.6 | 2.83 | 1.08 | 1.2 | 5 | 3.34 | 1.15 |
| 3-4 | 0.98 | 5.9 | 1.22 | 1.06 | 0.62 | 5.6 | 1.11 | 2.27 |
| 4-1 | 0.72 | 6 | 1.03 | 0.53 | 0.71 | 6 | 1.73 | 0.52 |
| 4-3 | 1.72 | 5.7 | 1.08 | 0.52 | 1.01 | 5.1 | 1.81 | 0.39 |
| Total for intersection | 1.39 | 5.93 | 1.37 | 0.69 | 1.02 | 5.60 | 1.56 | 0.76 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pau, G.; Campisi, T.; Canale, A.; Severino, A.; Collotta, M.; Tesoriere, G. Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach. Future Internet 2018, 10, 15. https://doi.org/10.3390/fi10020015
Pau G, Campisi T, Canale A, Severino A, Collotta M, Tesoriere G. Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach. Future Internet. 2018; 10(2):15. https://doi.org/10.3390/fi10020015
Chicago/Turabian StylePau, Giovanni, Tiziana Campisi, Antonino Canale, Alessandro Severino, Mario Collotta, and Giovanni Tesoriere. 2018. "Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach" Future Internet 10, no. 2: 15. https://doi.org/10.3390/fi10020015
APA StylePau, G., Campisi, T., Canale, A., Severino, A., Collotta, M., & Tesoriere, G. (2018). Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach. Future Internet, 10(2), 15. https://doi.org/10.3390/fi10020015