Research on a Support System for Automatic Ship Navigation in Fairway


Abstract
:1. Introduction
2. Literature
3. Mathematical Model of Ship Motion
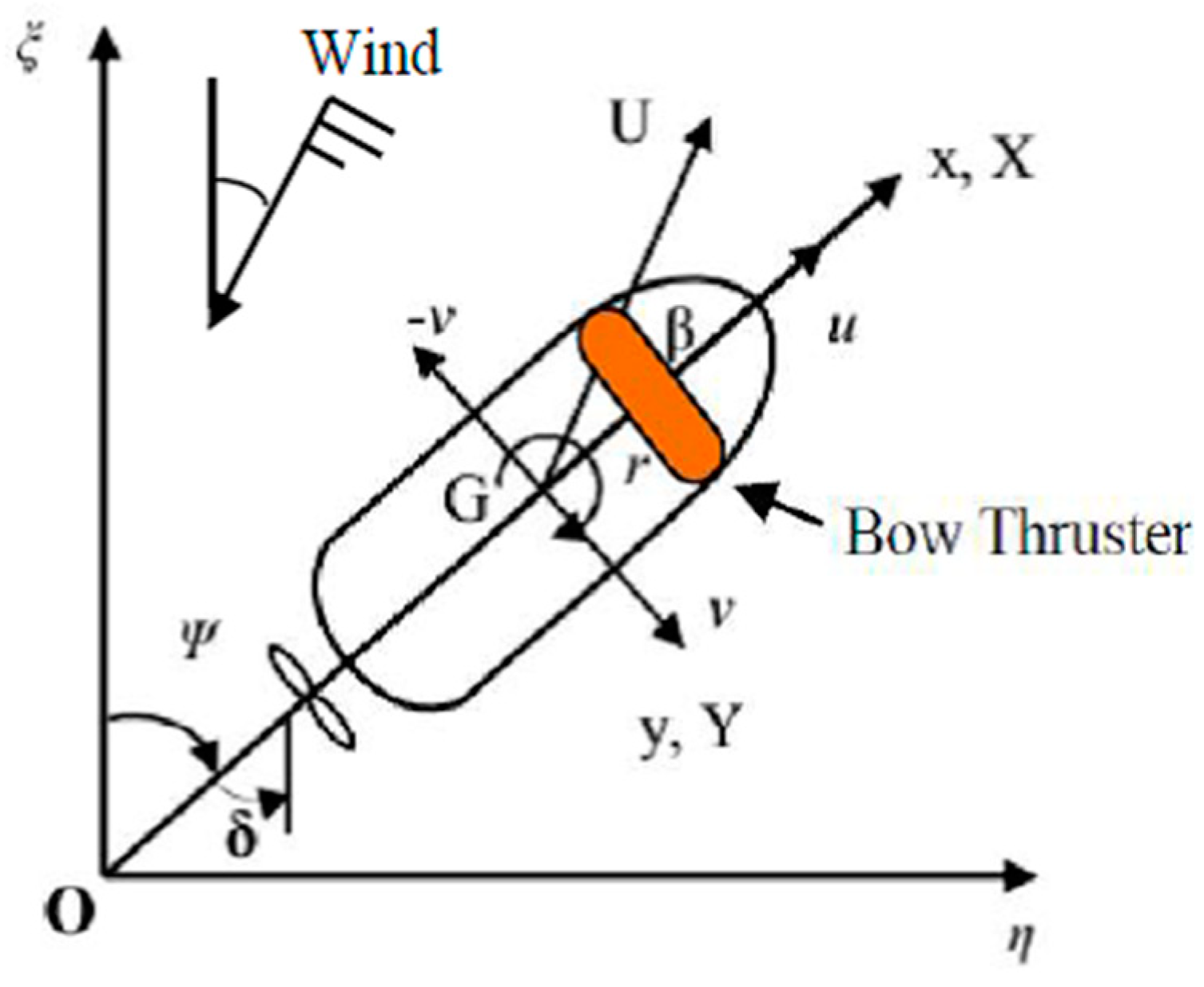
3.1. Ship Kinematics
3.2. Ship Dynamic Model
3.3. The Effect of Wind
4. Automatic Navigation System of a ship in a Fairway
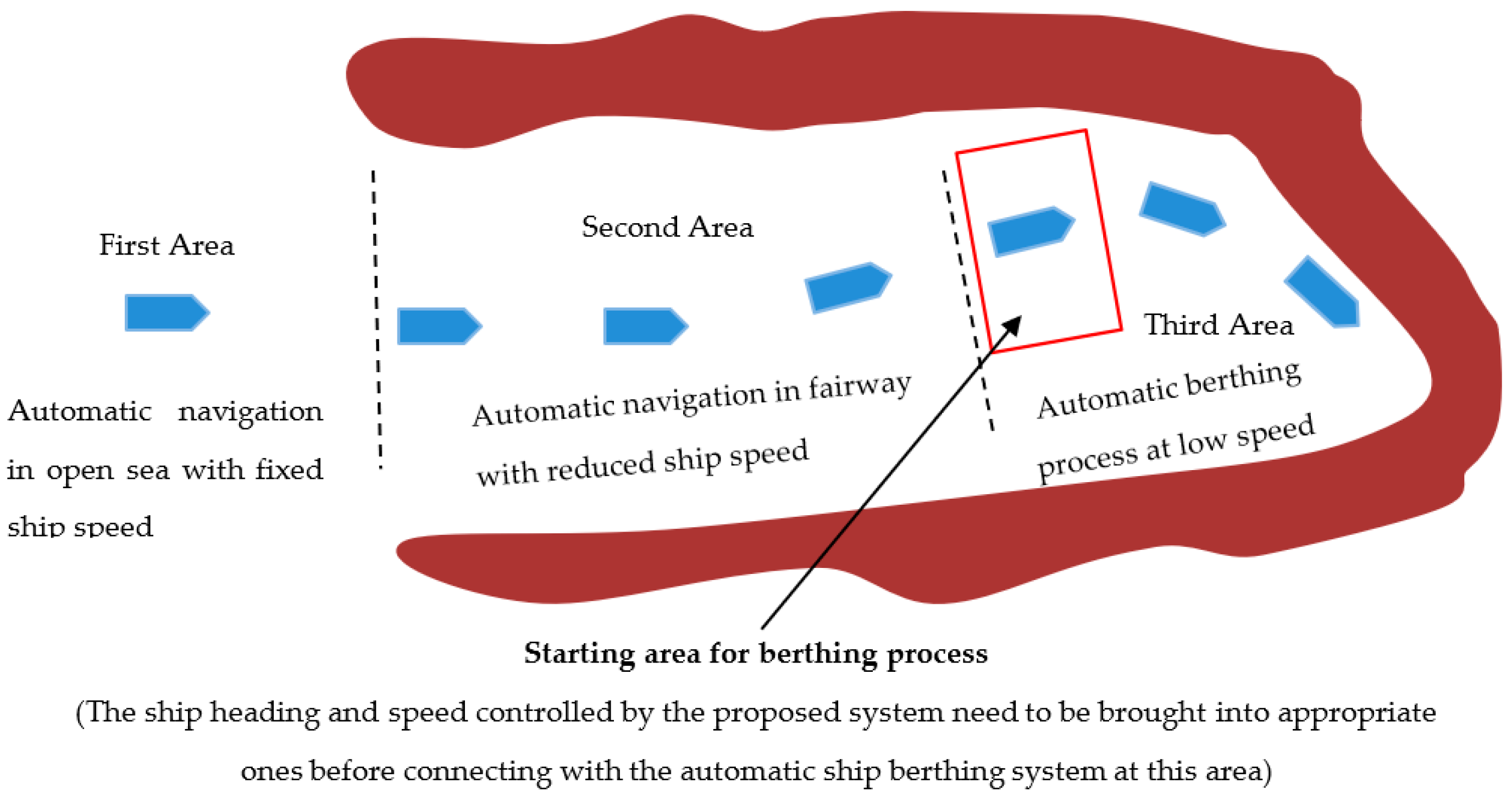
4.1. The Concept of this System
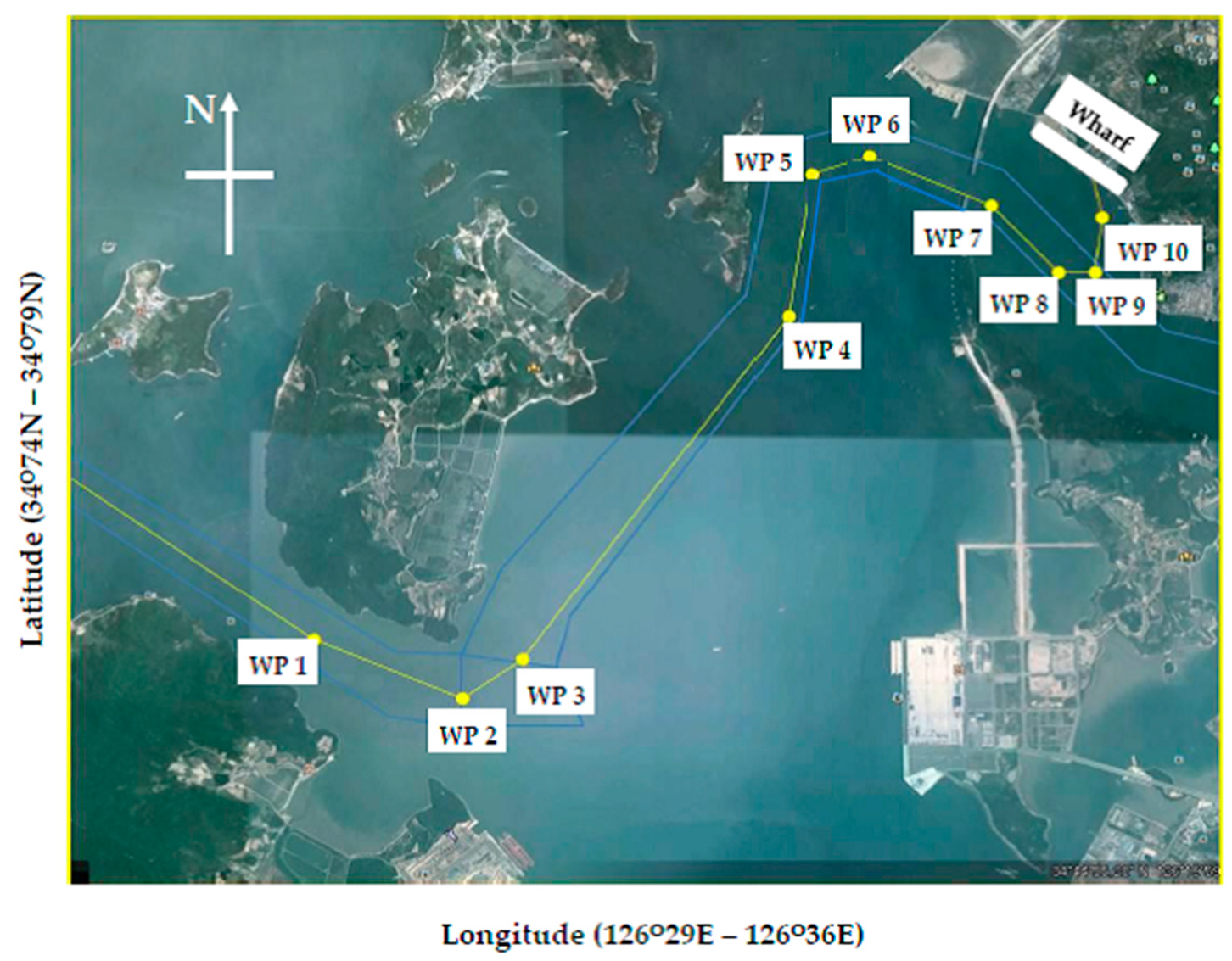
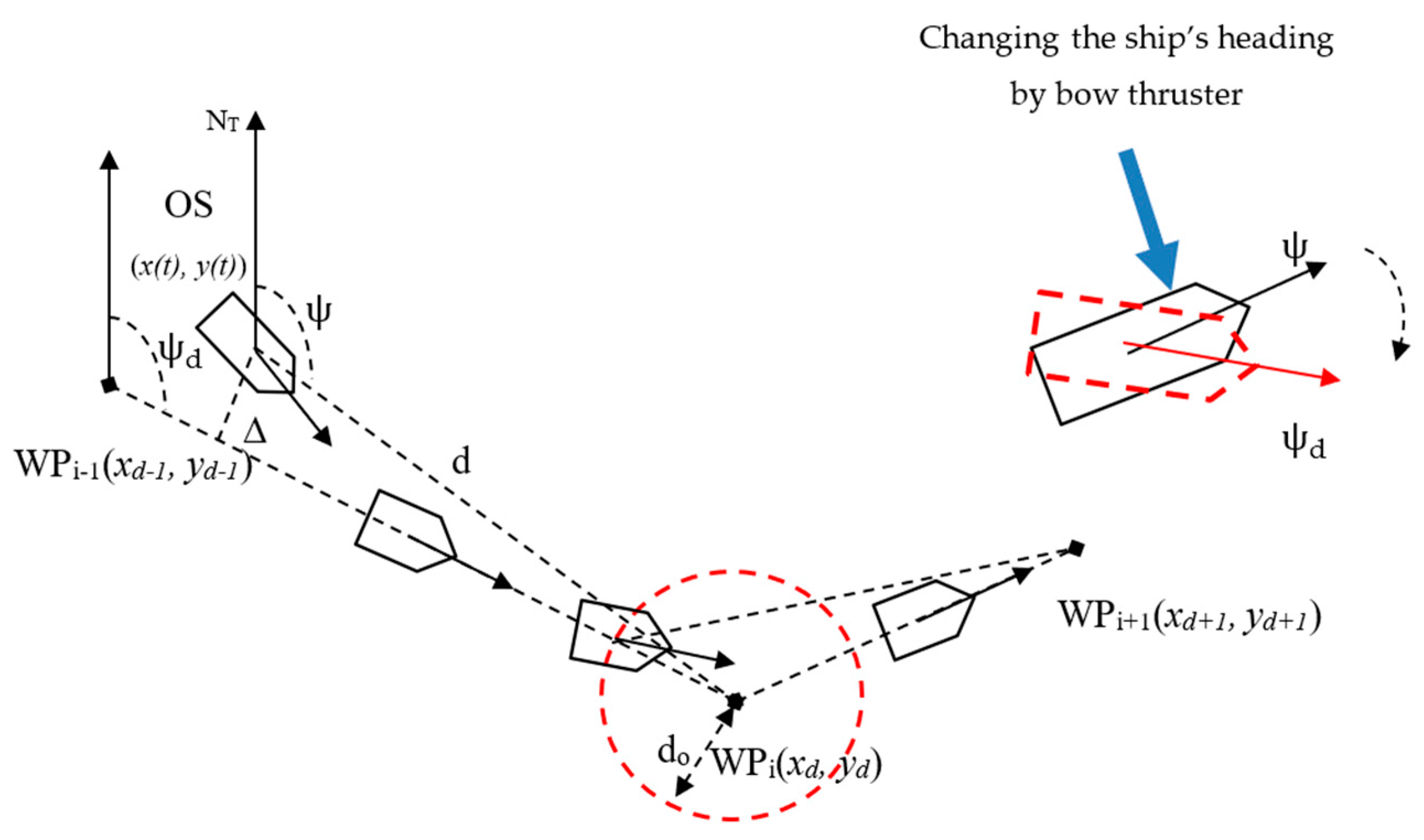
4.2. Ship Route Generator
4.3. Navigation Algorithm and Decision Making Block
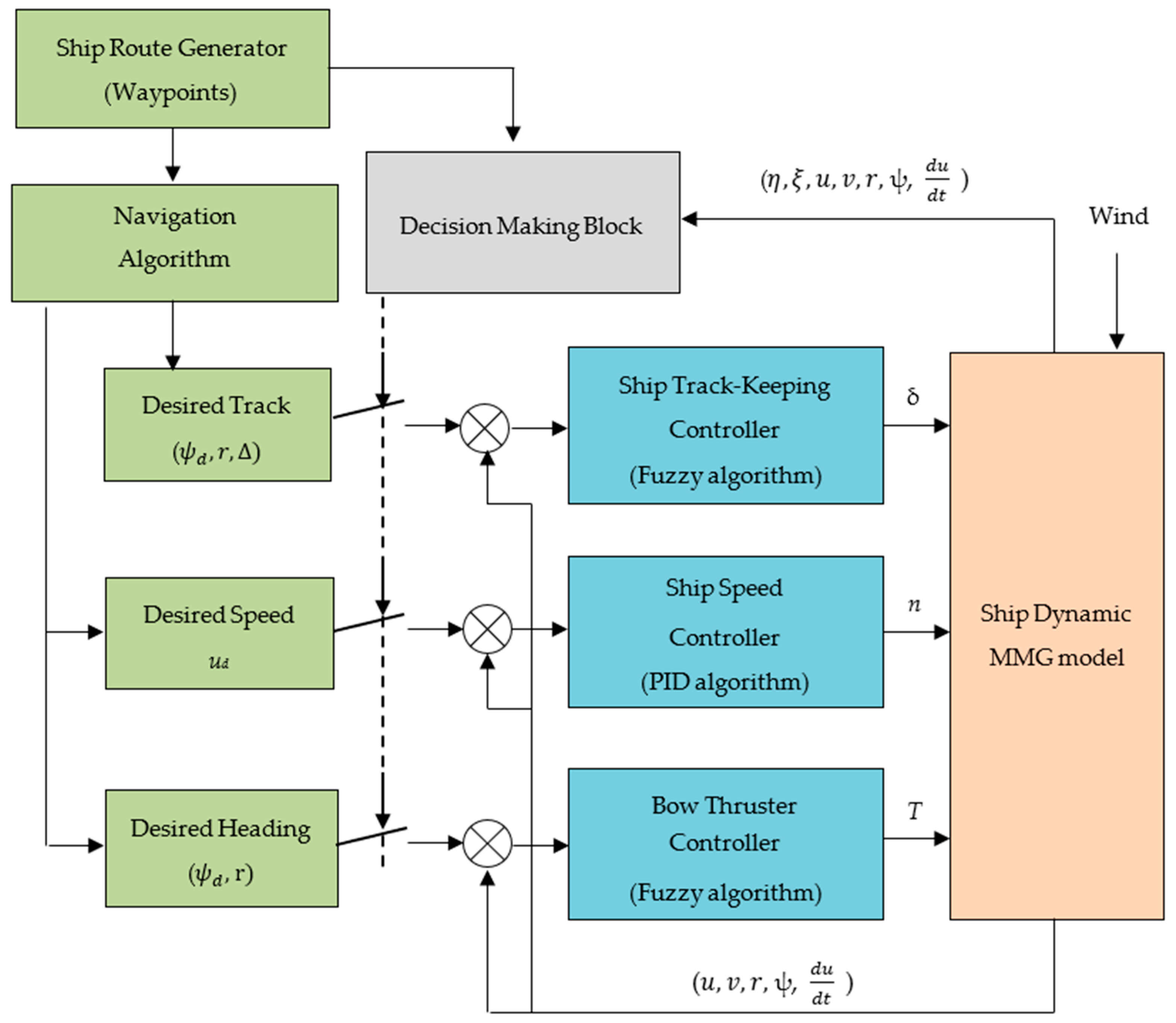
4.4. Control System
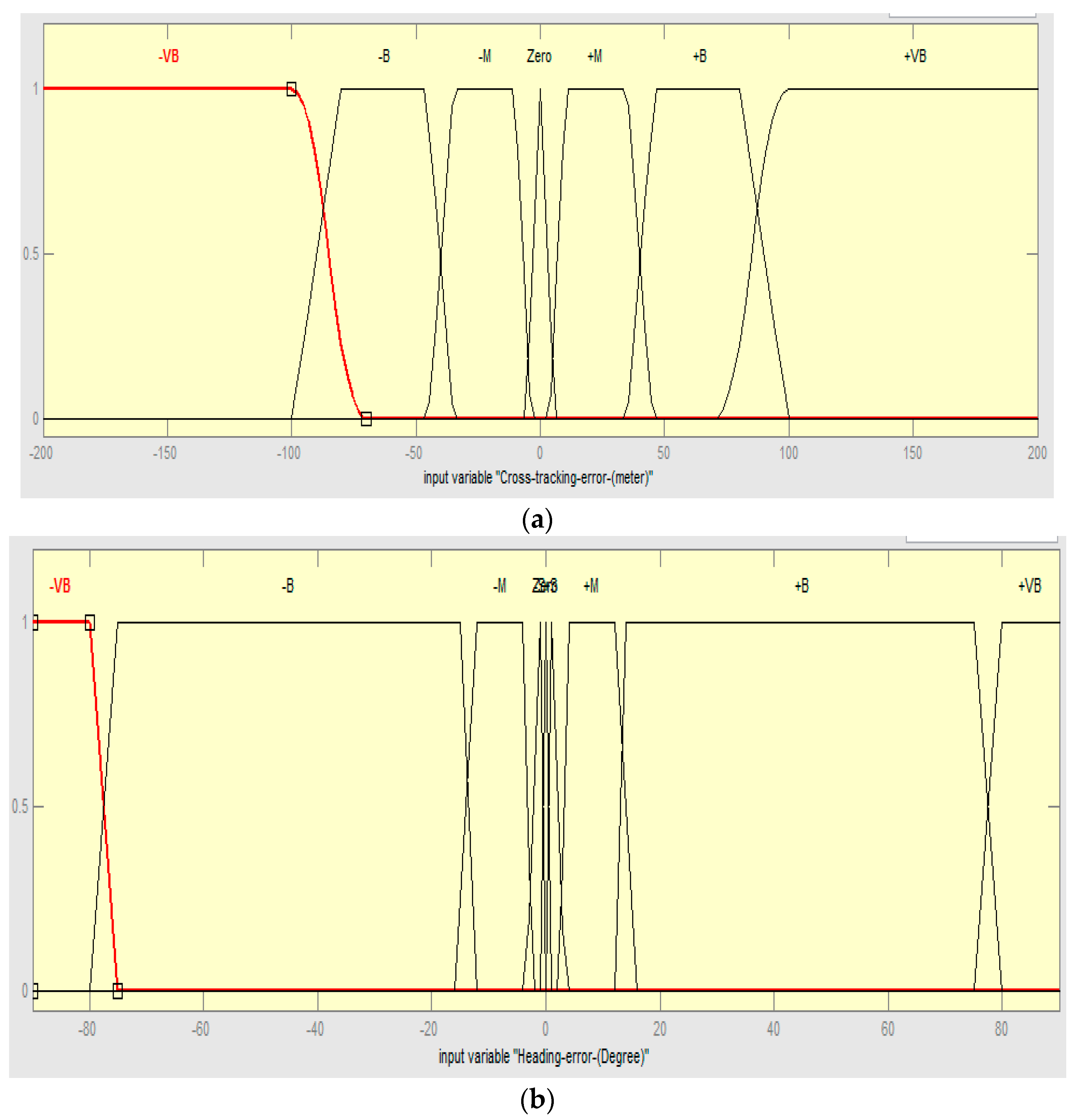
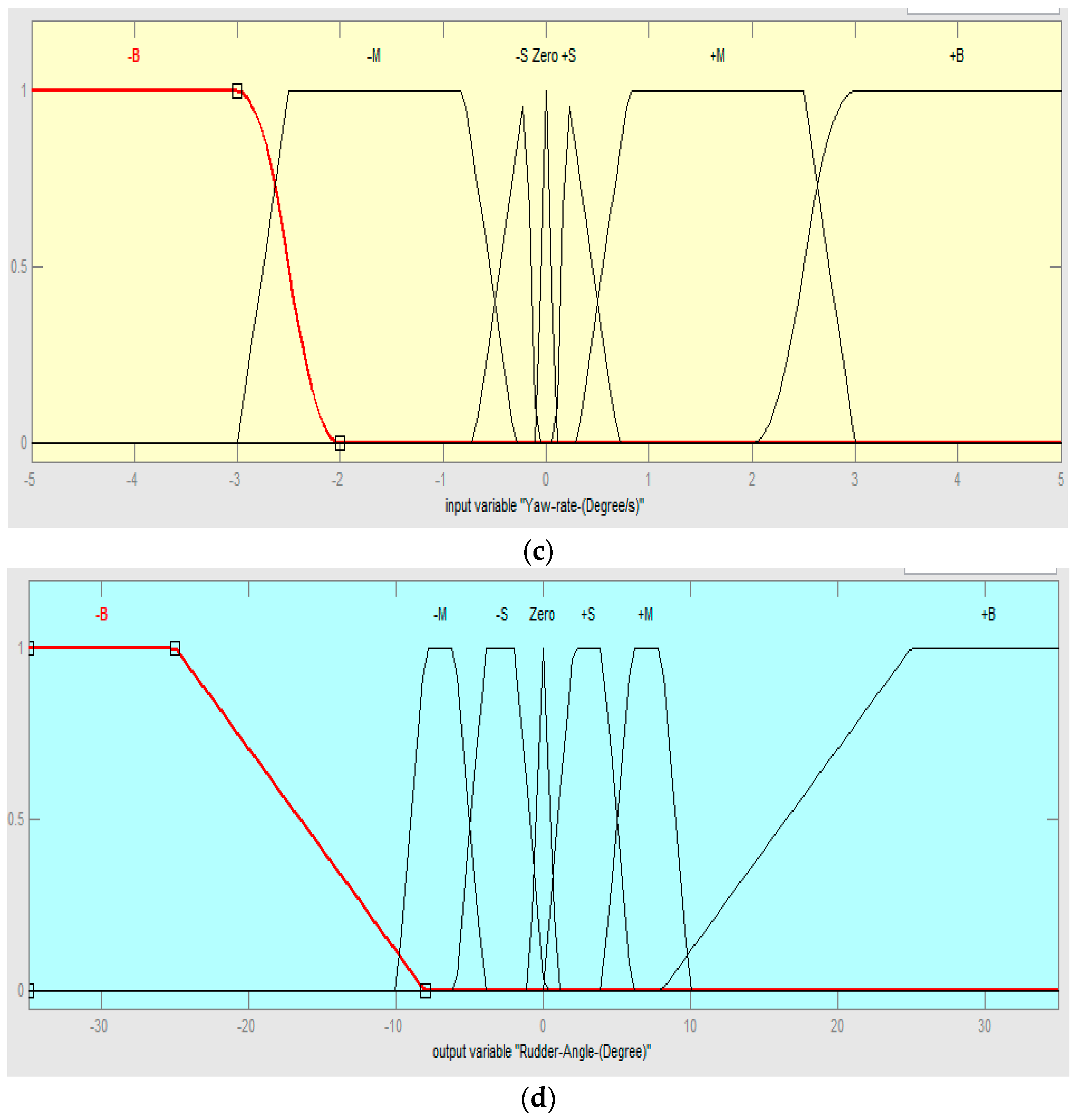
4.4.1. Ship Track-Keeping Controller
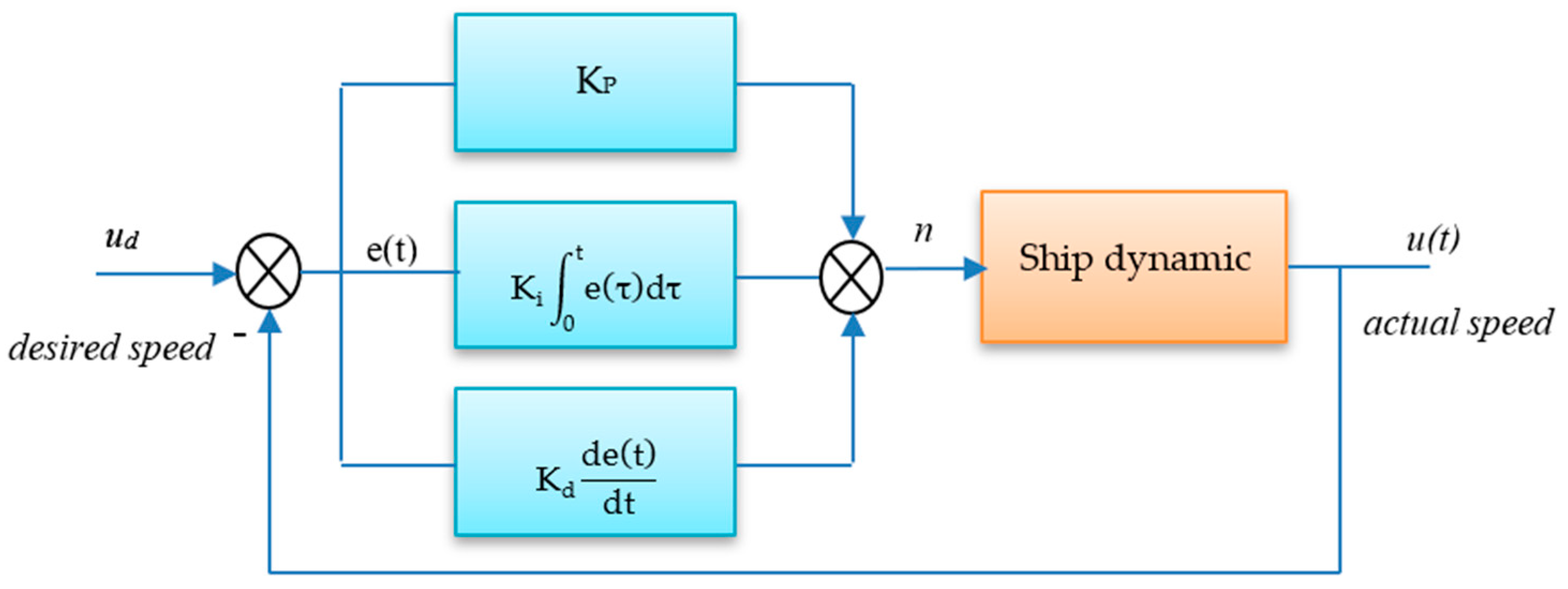
4.4.2. Ship Speed Controller
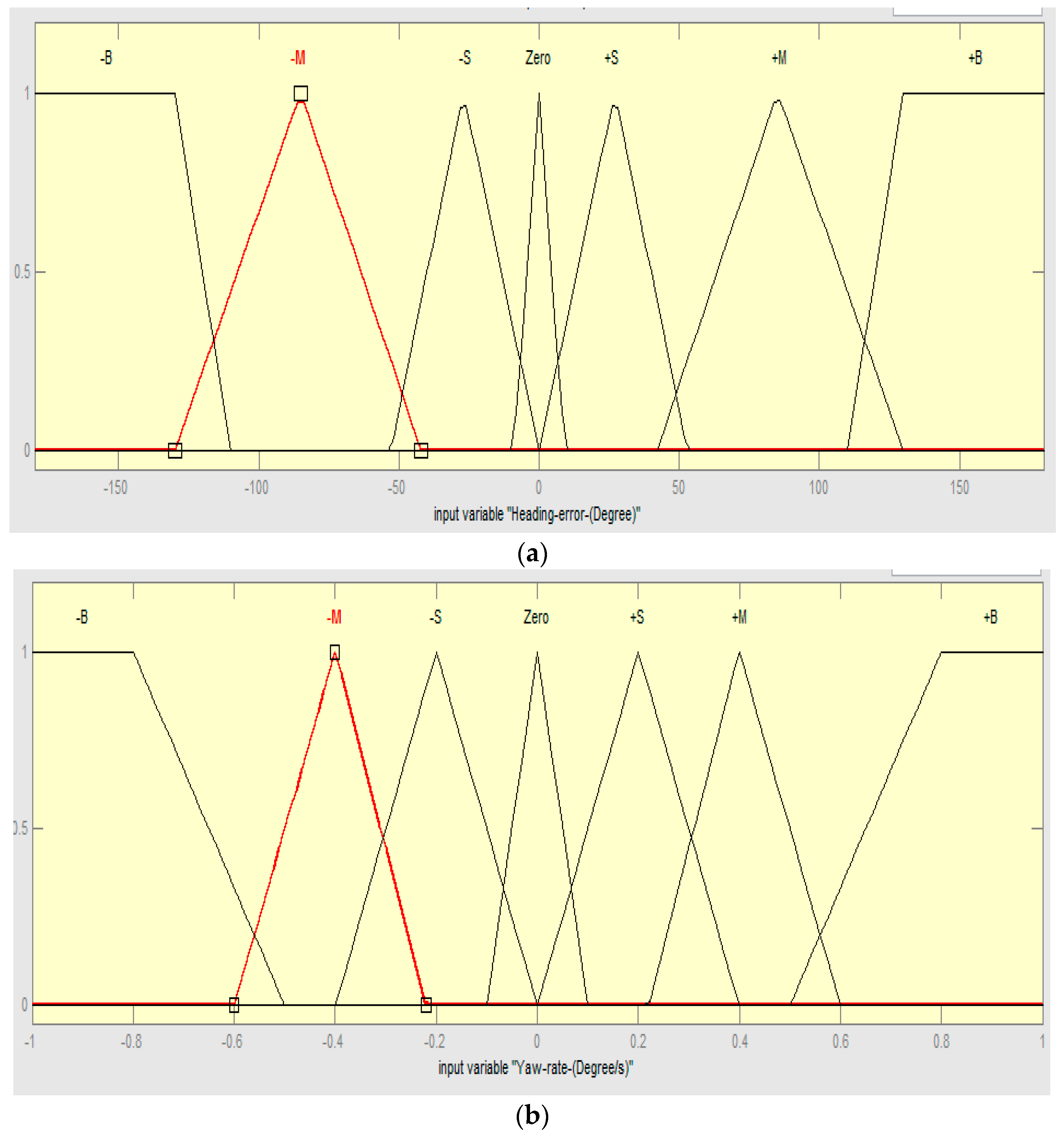
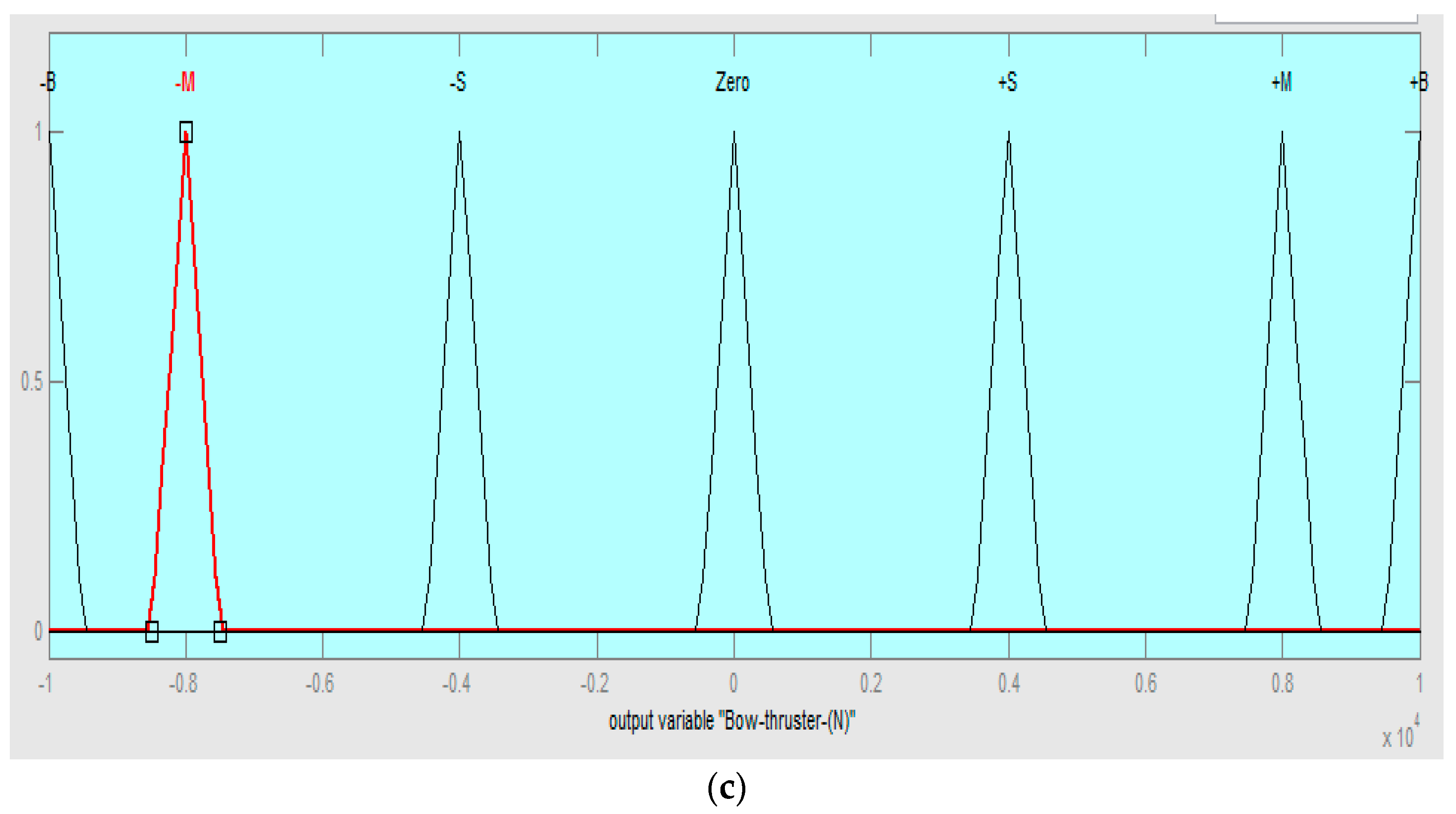
4.4.3. Heading Stabilizing Controller
5. Numerical Simulation and Result Discussion
5.1. The Conditions and Requirements of the Simulation
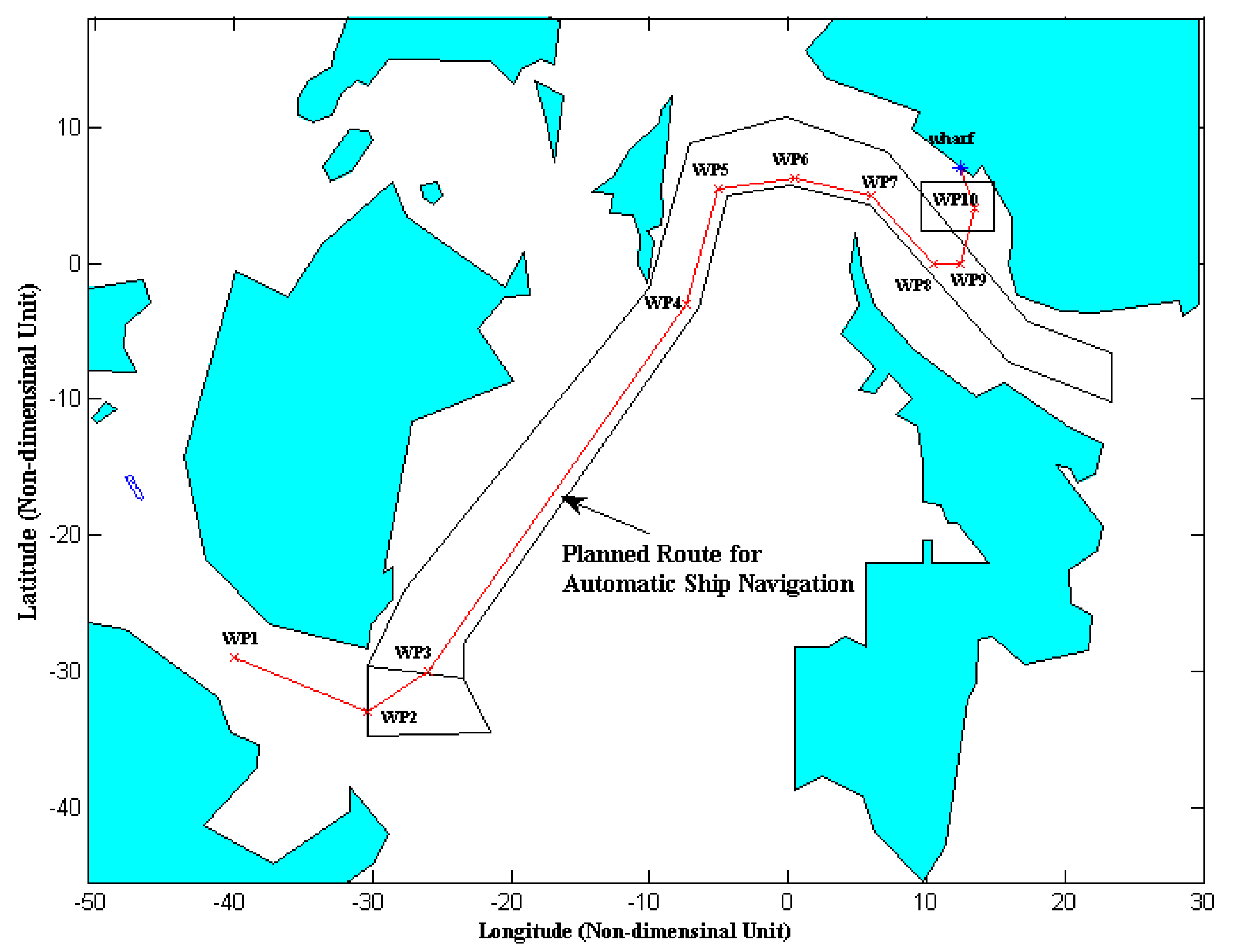
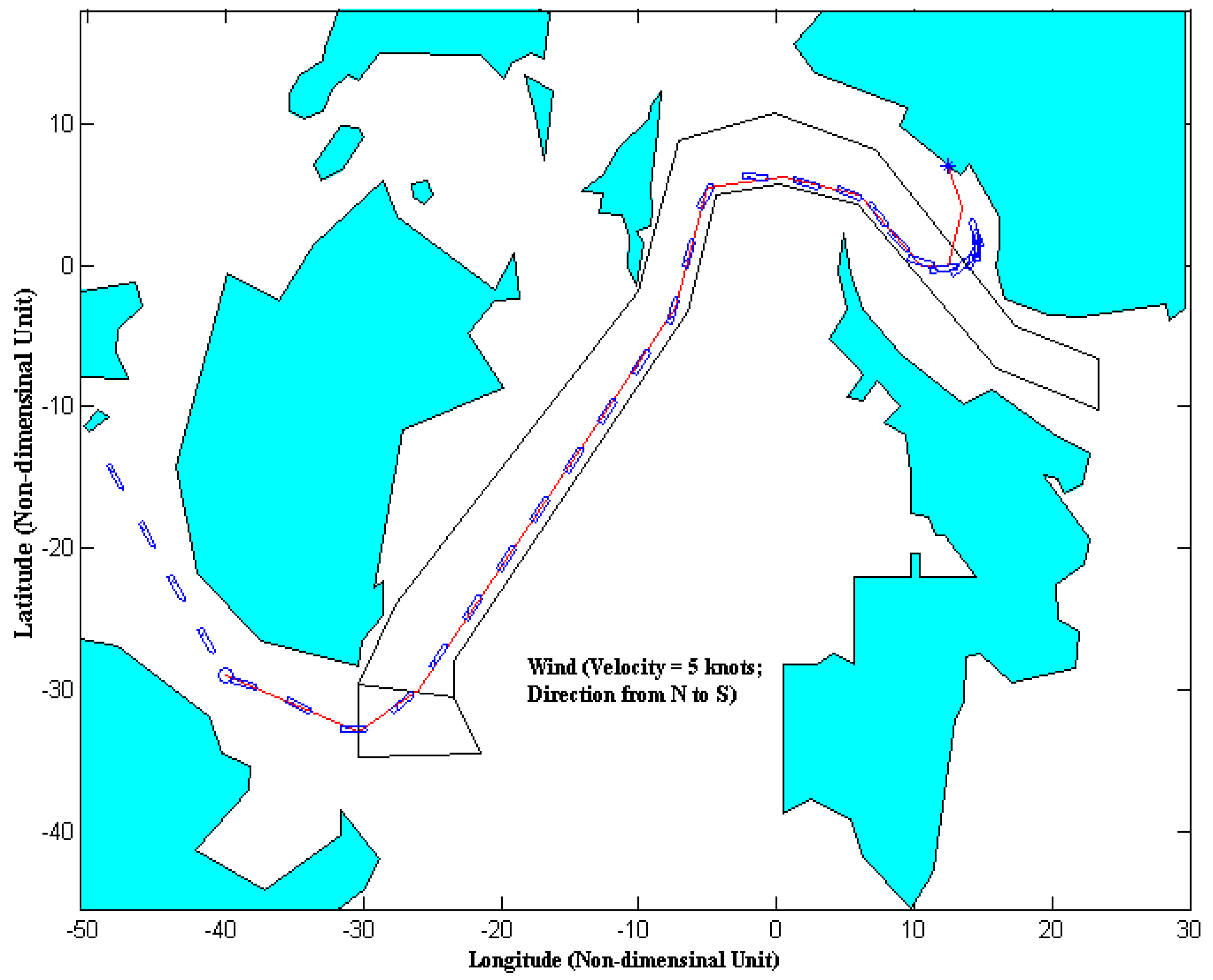
5.2. Automatic Ship Navigation in Fairway with the Proposed System
5.3. Automatic Ship Navigation in a Fairway without the Heading Stabilizing Controller
6. Conclusions
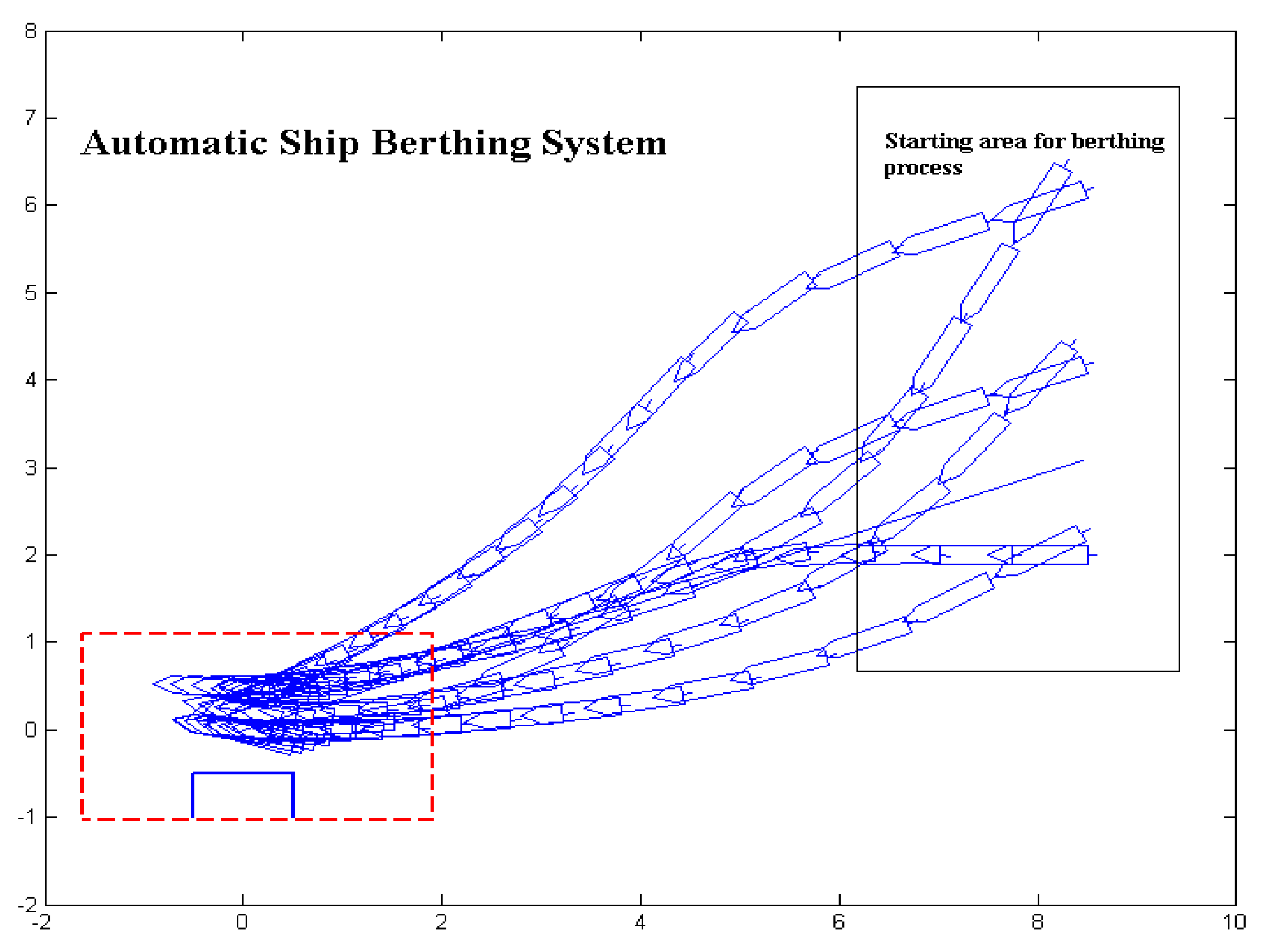
- This system is employed after the ship enters the fairway area and before the berthing process. This system is responsible for three tasks. The first task is automatically controlling the rudder to follow pre-planned tracks. The second is to decrease the ship’s speed to adapt to the automatic ship berthing system. Third, the ship’s heading is adjusted appropriately before the process.
- The proposed system includes two fuzzy controllers and one PID controller. The first fuzzy controller is applied to maintain ship track by changing the rudder angle while the second one is to stabilize the heading error. The PID controller is responsible for decreasing the ship’s speed by reducing propeller RPM. By this proposed system, the automatic control systems of the ship can be combined to obtain a fully automatic system for ship motion control.
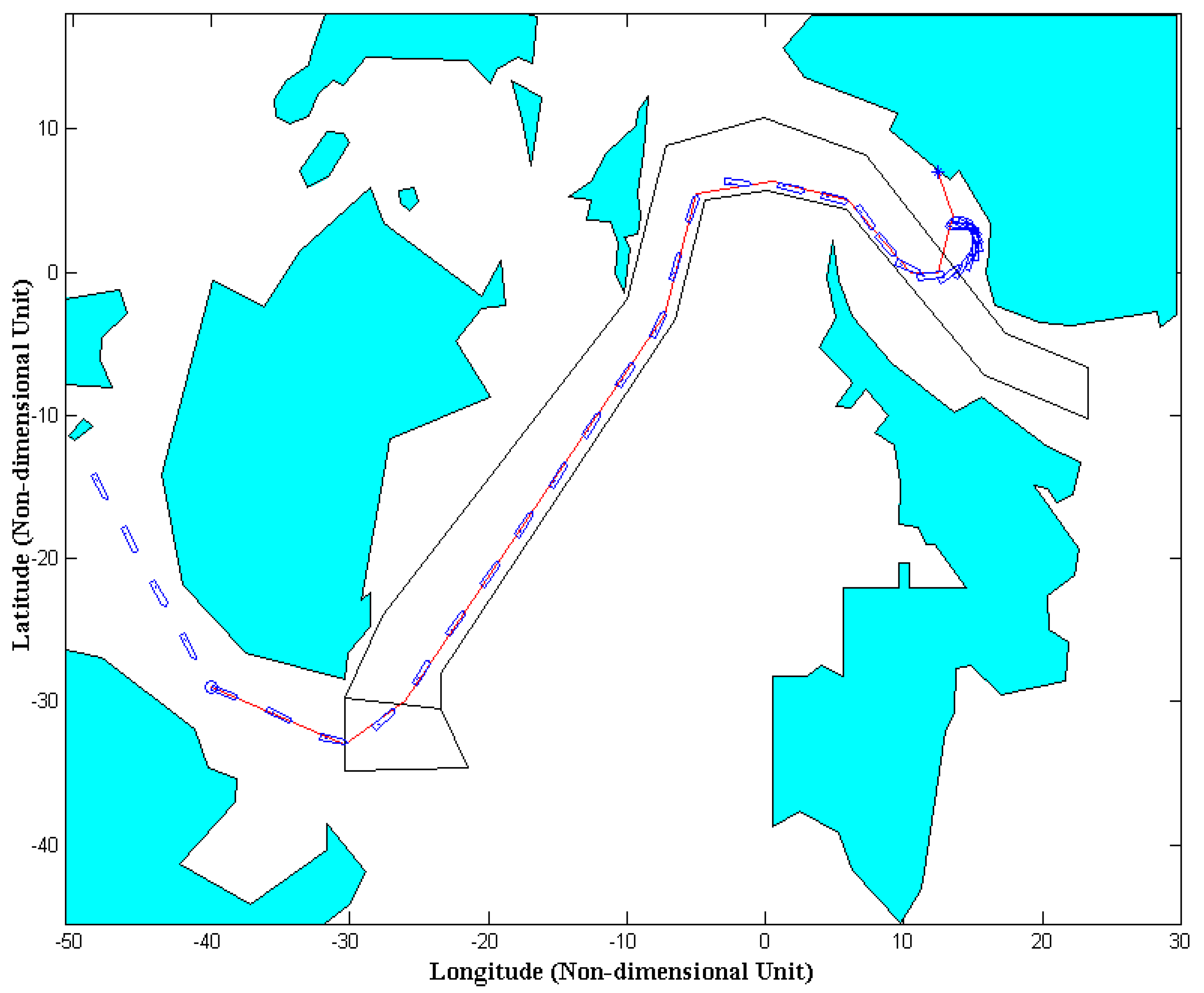
- Numerical simulations were performed with the training ship from Mokpo Maritime University to validate the effectiveness of this system. The results showed the system yields acceptable performance for automatic ship navigation in a fairway area.
Funding
Acknowledgments
Conflicts of Interest
References
- Sperry, E.A. Automatic steering. Trans. Soc. Nav. Archit. Mar. Eng. 1922, 30, 53–61. [Google Scholar]
- Minorski, N. Directional stability of automatically steered bodies. J. Am. Soc. Nav. Eng. 1922, 34, 280–309. [Google Scholar] [CrossRef]
- Amerongen, J.V.; Naute Lenke, H.R.; Veen der Van, J.C.T. An autopilot for ships designed by with fuzzy sets. In Proceedings of the IFAC Conference on Digital Computer Applications to Process Control, The Hague, The Netherland, 14–17 June 1997; pp. 479–487. [Google Scholar]
- Witkowska, A.; Smierzchalski, R. Designing a ship course controller by applying the adaptive backstepping method. Int. J. Appl. Math. Comput. Sci. 2012, 22, 985–997. [Google Scholar] [CrossRef] [Green Version]
- Witkowska, A.; Tomera, M.; Smierzchalski, R. A backstepping approach to ship course control. Int. J. Appl. Math. Comput. Sci. 2007, 17, 73–85. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, N.; Hu, Y.; Pan, D. Design of course-keeping controller for a ship based on backstepping and neural networks. Int. J. e-Navig. Marit. Control 2017, 7, 34–41. [Google Scholar] [CrossRef]
- Du, J.; Abraham, A.; Yu, S.; Zhao, J. Adaptive dynamic surface control with Nussbaum gain for course keeping of ships. Eng. Appl. Artif. Intell. 2014, 27, 236–240. [Google Scholar] [CrossRef]
- Liu, S.; Xu, C.; Wang, J. Disturbance rejection control for the course keeping of the fully submerged hydrofoil craft. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 747–751. [Google Scholar]
- Olsder, G.J. On the time optimal course changing of ships. J. Eng. Math. 1969, 3, 137–150. [Google Scholar] [CrossRef]
- Hasegawa, K.; Kouzuki, A. Automatic Collision avoidance system for ships using fuzzy control. In Proceedings of the 8th Ship Control System Symposium, The Hague, The Netherlands, 6–9 October 1987; Volume 2, pp. 34–58. [Google Scholar]
- Hwang, C. The Integrated Design of Fuzzy Collision-Avoidance and H∞-Auto pilots on Ships. J. Navig. 2002, 55, 117–136. [Google Scholar] [CrossRef]
- Bertin, D. Track-keeping controller for a precision maneuvering autopilot. In Proceedings of the IFAC Conference Control Application in Marine Systems, Fukuoka, Japan, 27–30 October 1998; pp. 155–160. [Google Scholar]
- Borkowski, P. Adaptive system for steering a ship along the desired route. Mathematics 2018, 6, 196. [Google Scholar] [CrossRef]
- Chen, M.; Ge, S.S.; Choo, Y.S. Neural network tracking control of ocean surface vessels with input saturation. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 85–89. [Google Scholar]
- Liu, Y.C.; Liu, S.Y.; Wang, N. Fully-tuned fuzzy neural network based robust adaptive tracking control of unmanned underwater vehicle with thruster dynamics. Neurocomputing 2016, 196, 1–3. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X.; Zheng, J. Adaptive neural path following control for underactuated ships in fields of marine practice. Ocean Eng. 2015, 104, 558–567. [Google Scholar] [CrossRef]
- Zhang, Y.; Hearn, G.; Sen, P. A neural network approach to ship track-keeping control. IEEE J. Ocean Eng. 1996, 21, 513–527. [Google Scholar] [CrossRef]
- Cheng, J.; Yi, J.; Zhao, D. Design of a sliding mode controller for trajectory tracking problem of marine vessels. IET Control Theory Appl. 2007, 1, 233–237. [Google Scholar] [CrossRef]
- Perera, L.; Soares, C.G. Pre-filtered sliding mode control for nonlinear ship steering associated with disturbances. Ocean Eng. 2012, 51, 49–62. [Google Scholar] [CrossRef]
- Qin, Z. Sliding-mode control of path following for underactuated ships based on high gain observer. J. Central South Univ. 2016, 23, 3356–3364. [Google Scholar] [CrossRef]
- Ming-Chung, F.; Jhih-Hong, L. On the track keeping and roll reduction of the ship in random waves using different sliding mode controllers. Ocean Eng. 2007, 34, 479–488. [Google Scholar]
- Ming-Chung, F.; Yu-Hsien, L.; Bo-Jhe, W. Applying the PD controller on the roll reduction and track keeping for the ship advancing in waves. Ocean Eng. 2012, 54, 13–25. [Google Scholar]
- Omerdic, E.; Roberts, G.N.; Vukic, Z. A fuzzy track-keeping autopilot for ship steering. J. Mar. Eng. Technol. 2003, 2, 23–35. [Google Scholar] [CrossRef]
- Morawski, L.; Pomirski, J. Ship track-keeping: Experiments with a physical tanker model. Control Eng. Pract. 1998, 6, 763–769. [Google Scholar] [CrossRef]
- Velagic, J. Adaptive fuzzy ship autopilot for Track-keeping. Control Eng. Pract. 2003, 11, 433–443. [Google Scholar] [CrossRef]
- Gierusz, W.; Nguyen, C.V.; Rak, A. Maneuvering control and trajectory tracking of very large crude carrier. Ocean Eng. 2007, 34, 932–945. [Google Scholar] [CrossRef]
- Im, N.K.; Hasegawa, K. A study on automatic ship berthing using parallel neural controller. J. Kansai Soc. Nav. Archit. Jpn. 2001, 2011, 65–70. [Google Scholar]
- Tran, V.L.; Im, N.K. A study on automatic berthing with assistance of auxiliary devices. Int. J. Nav. Archit. Ocean Eng. 2012, 4, 199–210. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Automatic Ship Berthing using Artificial Neural Network Trained by Consistent Teaching Data using Non-Linear Programming Method. J. Eng. Appl. Artif. Intell. 2013, 26, 2287–2304. [Google Scholar] [CrossRef]
- Im, N.K.; Nguyen, V.S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Nguyen, V.S.; Do, V.C.; Im, N.K. Development of automatic ship berthing system using artificial neural network and distance measurement system. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 41–49. [Google Scholar] [CrossRef]
- Park, J.Y.; Kim, N. Design of an adaptive backstepping controller for auto-berthing a cruise ship under wind loads. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 347–360. [Google Scholar] [CrossRef] [Green Version]
- Kijima, K.; Katsuno, T.; Nakiri, Y.; Furukawa, Y. On the maneuvering performance of a ship with the parameter of loading condition. J. Soc. Nav. Archit. Jpn. 1990, 168, 141–148. [Google Scholar] [CrossRef]
- Hawkins, S.; Taggart, R.; Hoyt, E.D. The Use of Maneuvering Propulsion Devices on Merchant Ships; Report RT-8518; Contract MA-3293; Robert Taggart, Inc.: Washington, DC, USA, 1965. [Google Scholar]
- Isherwood, R.M. Wind Resistance of Merchant Ship. Trans. RINA 1972, 115, 327–338. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Training Ship |
|---|---|
| Length Overall | 103 [m] |
| Length between perpendiculars | 94 [m] |
| Breadth | 15.6 [m] |
| Draft | 5.4 [m] |
| Thruster (Bow) | 49,000 [N] |
| Transverse projected area | 183.3 [m2] |
| Lateral projected area | 1053.7 [m2] |
| Coefficient | Value | Coefficient | Value |
|---|---|---|---|
| −0.5012 | −0.3561 | ||
| 0.183 | 0.1379 | ||
| 0.2496 | −0.0488 | ||
| 0.0542 | −0.0782 | ||
| 0.8755 | −0.0430 | ||
| −0.0028 | −0.0480 | ||
| 0.8937 | −0.3789 |
| Fuzzy Logic Controller | Variable Name (Unit) | Zones of Membership Functions and Their Parameters |
|---|---|---|
| Input set 1 | Cross track error (meters) | +VB (−VB): (zmf [100 70]) +B (−B): (trapmf [100 80 46 35]) +M (−M): (trapmf [45 35 10 4]) Zero: (trimf [−6 0 6]) |
| Input set 2 | Heading error (Degrees) | +VB (−VB): (trapmf [90 90 80 75]) +B (−B): (trapmf [80 75 15 12]) +M (−M): (trapmf [16 12 4 2.5]) +S (−S): (trimf [3 1.5 0]) Zero: (trimf [−1.2 0 1.2]) |
| Input set 3 | Yaw rate (Degrees/second) | +B (−B): (zmf [3 2]) +M (−M): (trapmf [3 2.5 0.8 0.3]) +S (−S): (trimf [0.7 0.2 0.1]) Zero: (trimf [−0.1 0 0.1]) |
| Output set | Ship rudder angle (Degrees) | +B (−B): (trapmf [35 35 25 8]) +M (−M): (trapmf [10 8 6 4]) +S (−S): (trapmf [6 4 2 0]) Zero: (trimf [−1 0 1]) |
| Fuzzy Logic Controller | Variable Name (Unit) | Zones of Membership Functions and Their Parameters |
|---|---|---|
| Input set 1 | Heading error (Degrees) | +B (−B): (trapmf [180 180 130 110]) +M (−M): (trimf [130 85 42]) +S (−S): (trimf [53 27 0]) Zero: (trimf [−1.5 0 1.5]) |
| Input set 2 | Yaw rate (Degrees/sec) | +B (−B): (trapmf [1 1 0.8 0.5]) +M (−M): (trimf [0.6 0.4 0.22]) +S (−S): (trimf [0.4 0.2 0]) Zero: (trimf [−0.1 0 0.1]) |
| Output set | Bow Thruster (N) | +B (−B): (trimf [10,000 10,000 9500]) +M (−M): (trimf [8500 8000 7500]) +S (−S): (trimf [4500 4000 3500]) Zero: (trimf [−500 0 500]) |
| Heading Error | ||||||||
| −B | −M | −S | Z | +S | +M | +B | ||
| Yaw Rate | −B | +B | +B | +B | +B | +M | +S | −M |
| −M | +B | +B | +B | +M | +S | Z | −M | |
| −S | +B | +B | +M | +S | Z | −S | −B | |
| Z | +B | +M | +S | Z | −S | −M | −B | |
| +S | +B | +S | Z | −S | −M | −B | −B | |
| +M | +M | Z | −S | −M | −B | −B | −B | |
| +B | +M | −S | −M | −B | −B | −B | −B | |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, V.S. Research on a Support System for Automatic Ship Navigation in Fairway. Future Internet 2019, 11, 38. https://doi.org/10.3390/fi11020038
Nguyen VS. Research on a Support System for Automatic Ship Navigation in Fairway. Future Internet. 2019; 11(2):38. https://doi.org/10.3390/fi11020038
Chicago/Turabian StyleNguyen, Van Suong. 2019. "Research on a Support System for Automatic Ship Navigation in Fairway" Future Internet 11, no. 2: 38. https://doi.org/10.3390/fi11020038
APA StyleNguyen, V. S. (2019). Research on a Support System for Automatic Ship Navigation in Fairway. Future Internet, 11(2), 38. https://doi.org/10.3390/fi11020038