1. Introduction
Due to the advantages of high mobility and reduced cost, Unmanned Aerial Vehicles (UAVs) have found promising applications in wireless communication systems [
1,
2], not only to support the existing cellular networks in high-demand and overload situations, but also to provide wireless connectivity in scenarios lacking infrastructure such as battlefields or disaster zones. Compared with terrestrial communications, UAV-aided wireless systems are in general faster to deploy [
3], more flexible to reconfigure, and likely to have better communication channels as a results of Line-of-Sight (LoS) links. The 5G cellular network is expected to support a peak data rate of 10Gb/s with only 1ms round-trip latency, which is adequate for UAV communication applications [
4]. Integrating UAVs into a cellular network is regarded as a new paradigm [
4]. The role that a UAV performs in a wireless communication system typically follows either of two types—firstly, the UAV can be deployed as an aerial Base Station (BS) for the ground terminals [
5]; secondly, the UAV can be deployed as a mobile relay providing wireless connectivity between distant ground terminals [
6,
7,
8]. The relay often plays an important role in wireless communications [
9,
10,
11].
How to deploy a UAV in a wireless communication system is a popular research topic [
12,
13], as it is related to energy consumption and data transmission performance. There are primarily two categories of UAV deployment study, static deployment of the UAV [
14,
15,
16] and the use of mobile UAVs [
17,
18,
19,
20]. The efficient deployment of a UAV acting as a wireless BS providing coverage for ground terminals is analysed in References [
14,
15]. In Reference [
16], the authors propose an intelligent strategy that allows UAVs to perform tactical movements in a disaster scenario, combining the Jaccard distance and artificial algorithms for maximizing the number of served victims. However, the analysis is based on static deployment of the UAV. The authors of Reference [
21] propose a simple but effective dynamic trajectory control algorithm for UAVs. The proposal adjusts the centre coordinates and the radius of UAVs’ trajectories in order to alleviate congestion. Nevertheless, the method is implemented by a UAV control station, which introduces control signal overhead.
In regard to mobile UAV deployment, the UAV flight trajectory is planned considering the wireless communication features. A UAV that acts as a mobile BS serving a group of ground terminals to maximize the throughput is demonstrated in Reference [
17]. The UAV flies in a cyclical pattern and the ground terminals are located along a straight line, rather than a 2D plane. An energy-efficient data collection problem in UAV-aided wireless sensor network is solved in Reference [
18]. The authors only consider one common transmission channel that all the sensors have to contend for using a time division multiple access scheme. The resource allocation and trajectory design for energy-efficient secure UAV communication system is studied in Reference [
19]. The authors consider the ground terminals to transmit data via separate sub-carriers so as to avoid interference. A joint trajectory and communication design for UAV-enabled system is elaborated in Reference [
20]. The data transmission in these above-mentioned works are in orthogonal channels, either in different time slots or in different transmission bands. However, bandwidth efficient techniques which allow different data signals to be transmitted during the same time slot and radio band have not been considered in the UAV-aided wireless communication systems.
In this paper, in order to improve the throughput of the system, a bandwidth efficient technique named the Dual Sampling (DS) method [
22] is employed in the data transmission procedure. In Reference [
23] DS is applied in stationary caching network to enhance the throughput. This time, we focus on the usage of DS method in a mobile UAV network. With the DS method enabled, the UAV is able to receive the information of different ground terminals simultaneously, rather than separating the transmission of each ground terminal within sequential time slots or by using different radio bands. Meanwhile, the UAV flight trajectory can be modified when the DS mechanism is enabled, which is different from the trajectory derived in References [
18,
20]. It is shown in Reference [
24] that the UAV flight trajectory is closely related to the UAV’s propulsion energy. Hence different trajectories can result in different consumption of propulsion energy for the UAV.
The contributions of this paper are listed as follows:
Propose an iterative algorithm which alternately optimizes bandwidth scheduling and UAV flight trajectory in each iteration, and a power balance method for supporting DS.
Comparison of the system performance of a DS-enabled scheme and non-DS schemes in terms of the optimal throughput, bandwidth scheduling and UAV trajectory.
Comparison of the UAV propulsion energy consumption of a DS-enabled scheme and non-DS schemes based on the derived optimal UAV trajectory.
In the next section, we present the system model.
2. System Model
The role of UAVs in the context of natural disaster management is identified in Reference [
25]. The main applications of systems involving UAVs are classified according to the disaster management phase, and a review of relevant research as well as the research challenges is provided in Reference [
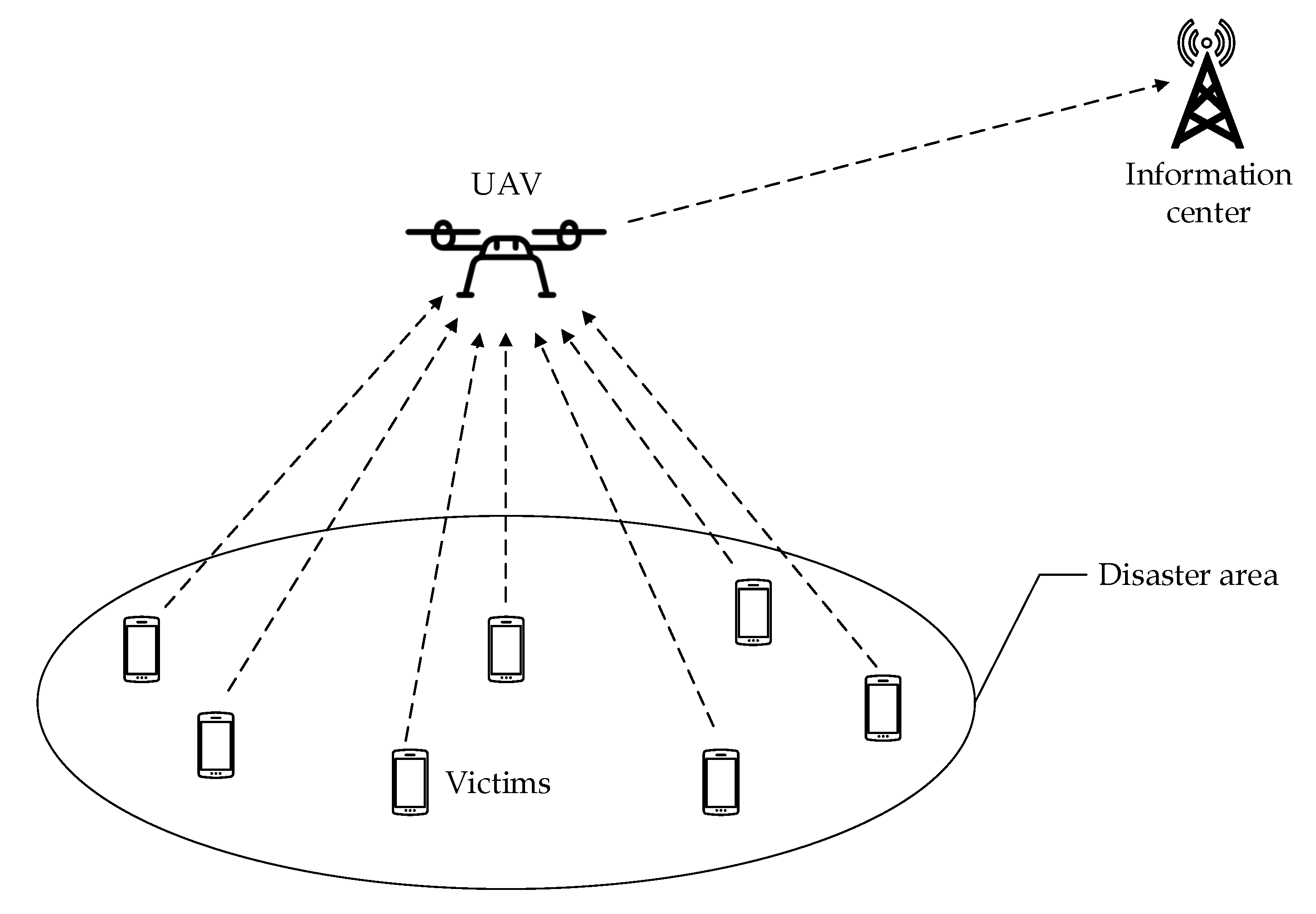
25]. In our paper, we consider a disaster scenario where a UAV is deployed within the affected area to relay the data from
N ground victims to a remote information centre for coordinating search and rescue missions as the terrestrial infrastructure connecting the affected area and the information centre is damaged, as illustrated in
Figure 1. The location of the
nth victim is denoted by
. The UAV is dispatched to collect data from the victims for a duration of
T seconds. We assume that the UAV flies at a fixed altitude of
H meters and we denote its maximum speed as
in meters/second (m/s). The initial and final locations of the UAV are assumed to be pre-determined, whose horizontal coordinates are denoted as
,
, respectively. We assume that
such that there exists at least one feasible trajectory for the UAV to follow.
In this paper, we aim to optimize the transmission throughput from ground victims to the UAV, by jointly adjusting the wireless bandwidth scheduling and UAV trajectory. This is considered as a form of trajectory and communication resource allocation co-design problem in Reference [
4]. Such problems can be first converted into more tractable forms with a finite number of optimization variables by trajectory discretization [
4,
18,
20], and then utilize the more general optimization framework with Block Coordinate Descent (BCD) and Successive Convex Approximation (SCA) techniques to deal with the non-convexity [
4]. Two trajectory discretization techniques, the time discretization and path discretization, are introduced in Reference [
4], together with a comparison of them. Since time discretization has the advantages of equal time slot length, linear state-space representation, and the mission completion time
T is assumed to be known. Therefore time discretization is considered here.
For convenience, T is equally divided into K time slots, such that , where denotes the elemental slot length such that the UAV’s location is considered unchanged by the ground victims during this time even at the maximum speed. Therefore, the UAV’s trajectory can be approximated by the sequence , where denotes the UAV’s location at time slot k. To be specific, , corresponds to the initial and final locations of the UAV respectively, that is, , .
We compare the data transmission performance of the system when the DS method is enabled or disabled. We assume the total bandwidth of the system and the transmission power of each victim are the same. When DS is disabled, we consider two bandwidth allocation mechanisms. One is a fair allocation scheme [
19]. We assume
N different sub-carriers with the same bandwidth
W are fairly allocated to the
N victims to avoid interference during the period
T. The other is a bandwidth contention scheme [
18,
20]. We assume the overall bandwidth
is occupied by one victim for data transmission during each time slot.
When DS is enabled, due to the limitations of transmission synchronisation and processing complexity, we assume during each time slot only transmissions from one pair of victims can be supported. In order to ensure the proper functioning of the DS method, the signal level received by the UAV from the supported victims are kept the same [
22]. Meanwhile, during each time slot, the non-DS supported victims are allocated with bandwidth
W each. The supported victims can both transmit in the remaining bandwidth
simultaneously [
22]. Therefore, we denote the bandwidth scheduling variable as
if victim
n is supported by DS at time slot
k, and
if victim
n is not supported by DS, where
.
The following statements relate to the DS enabled scheme. The distance between the UAV and victim
at time slot
is given by
We use
P to denote the transmission power of a victim. Furthermore, we assume that the channels from the victims to the UAV are dominated by LoS links. Thus, the channel power gain between victim
n and the UAV in time slot
k is given by
where
represents the channel power gain at a reference distance of unit length. The maximum achievable data rate in bits/s/Hz for victim
n at time slot
k with respect to the sub-carrier bandwidth
W is given by
where
is the power of the Additive White Gaussian Noise (AWGN). For the DS supported victims, the transmission bandwidth is
. Since the noise power spectrum density is the same, the received noise power at the UAV is twice as that for a non-DS supported victim. However, the UAV treats the overlapping signal as the effective received signal [
22], hence doubling the received signal power. As a result, the received SNR at the UAV for a DS supported victim is same as that for a non-DS supported victim.Thus, the average achievable data rate from victim
n to the UAV is denoted as
Note that, for each victim, is the overall data throughput. As and K are constants, thus the average achievable data rate is equivalent to the overall throughput.
Additionally, in this problem, the bandwidth scheduling variables set is , and the UAV’s trajectory location variables set is .
5. Numerical Results
In this paper, the main metric to assess the system is the average data rate among all the victims which is expressed in units of bits/s/Hz. With a higher average data rate, more throughput can be achieved for the victims. Additionally, the victim bandwidth scheduling and the UAV optimal flight trajectory are also metrics for evaluating the system performance.
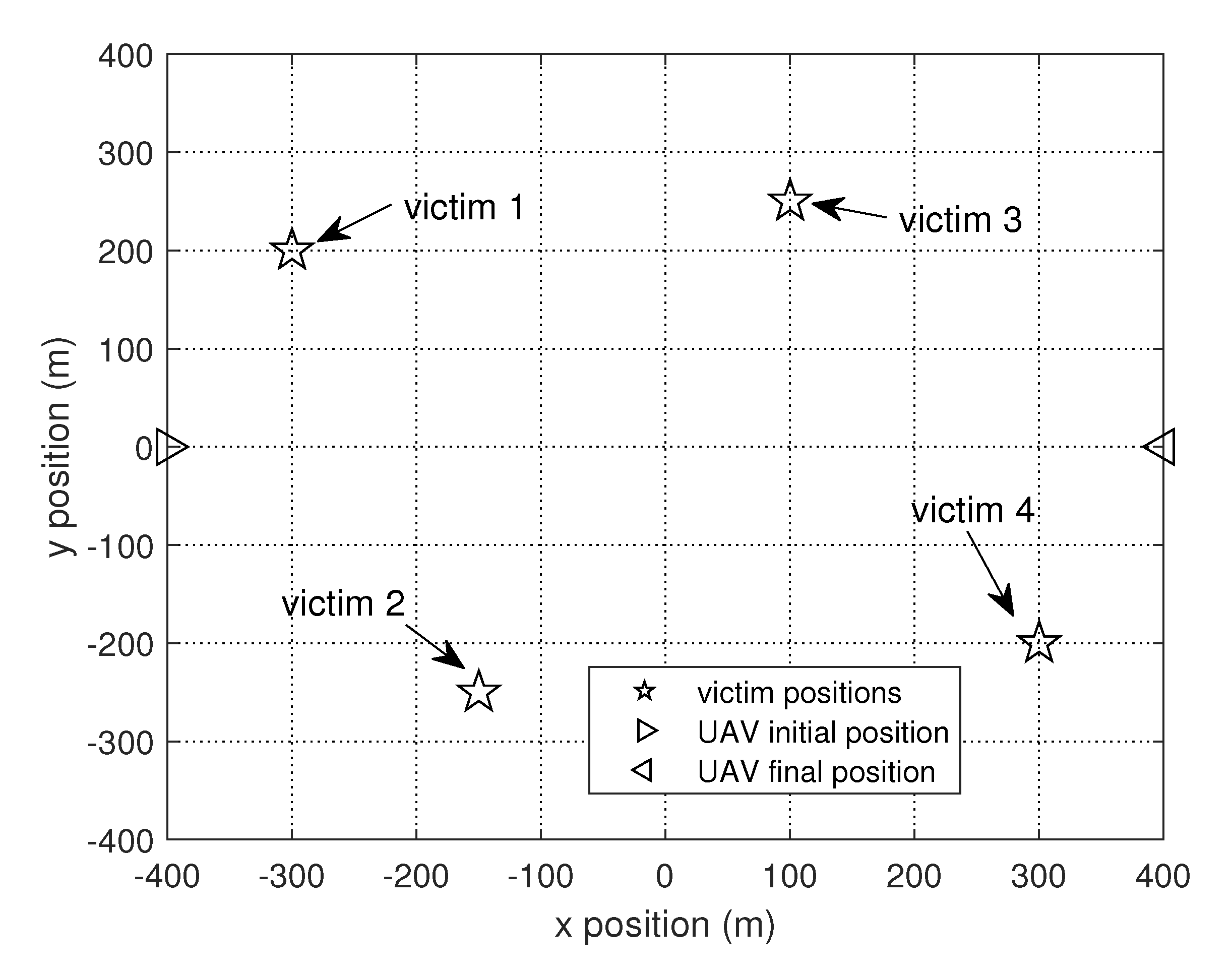
We consider a system with
victims that are located within an area of size
m
2 as illustrated in
Figure 2. The UAV is assumed to fly at a fixed altitude of
m. The receiver noise power is assumed to be
dBm. The channel power gain at the reference distance of unit length is set to
dB. The transmit power for the victim is set to
W and the maximum flight speed of the UAV is set to
m/s [
20]. The elemental time slot is set to be
s [
18]. The threshold to control the iteration of the solution algorithm is set as
.
In this section, we compare the DS scheme with non-DS schemes comprising fair bandwidth allocation and bandwidth contention mechanisms. It should be noted that the bandwidth contention mechanism problem is solved by the BCD-SCA optimization framework. The fair bandwidth allocation mechanism problem is solved assuming fixed bandwidth scheduling. The DS scheme is solved by the BCD-SCA optimization framework, together with the power balance technique.
We first list the optimal max-min average data rate for the different schemes for various total period values
T in
Table 1.
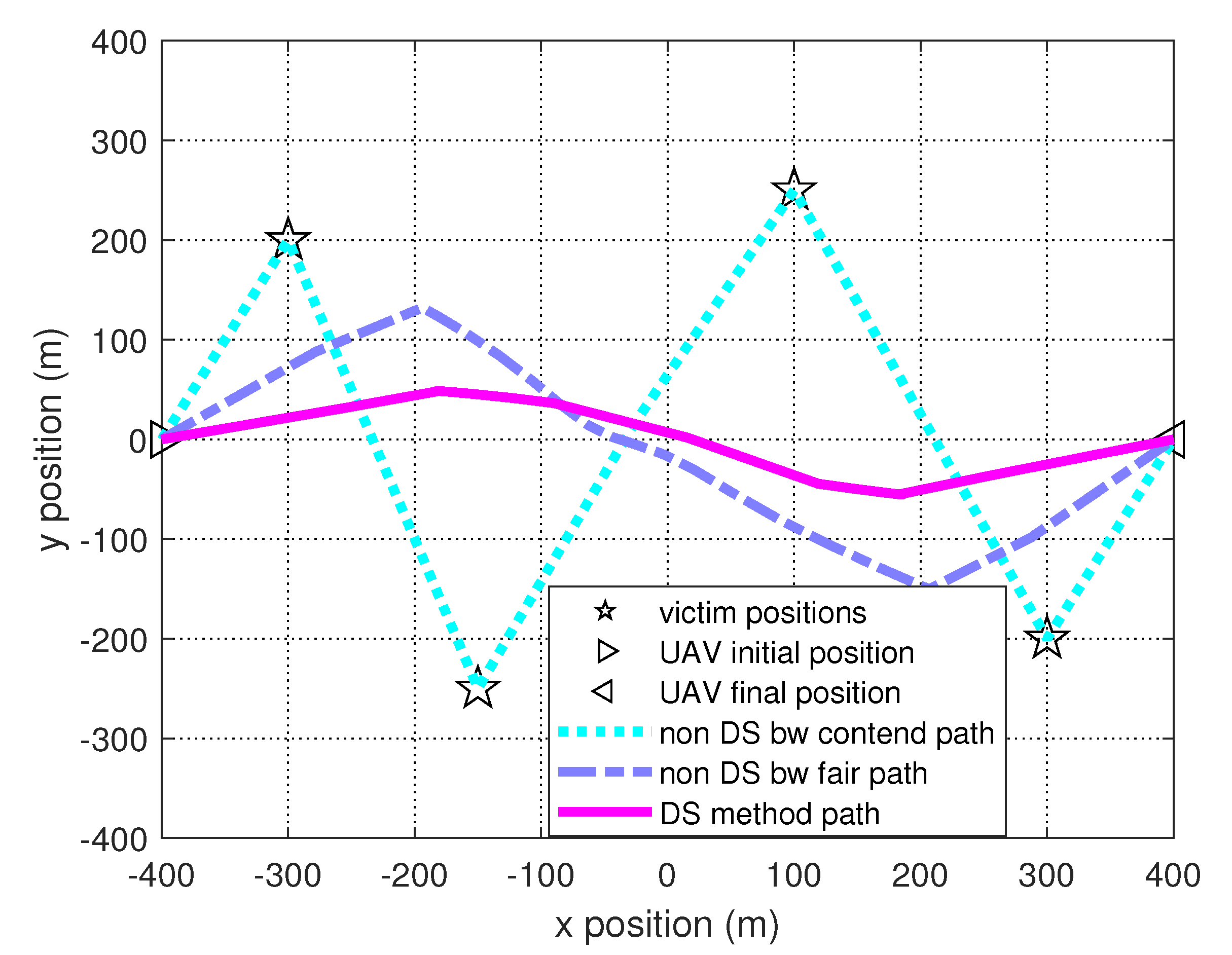
Figure 3 shows the optimal UAV flight trajectories for the different schemes when
s. The DS method has the best performance in terms of average data rate, since the bandwidth is multiplexed by a pair of victims in each time slot. The non-DS bandwidth contention scheme has better throughput performance than the non-DS fair bandwidth allocation scheme as the UAV flies to and hovers above each victim in the bandwidth contention scheme, which brings better channel gain for data transmission.
Furthermore, we analyse the theoretical optimal max-min average data rate for the DS scheme under different
T, as shown in the last row of
Table 1. The theoretical values for the scenario shown in
Figure 2 are feasible to calculate. Within time
T, the UAV should spend the most time supporting the DS enabled victims, and spend the least time traversing from the initial position to the final position. To be specific, the UAV should traverse at its maximum speed, and for the remaining time hover at two positions, one is the midpoint of line segment victim1–victim2, and the other is the midpoint of line segment victim3–victim4. By letting the UAV hover at the midpoint, it is able to maximize the received signal power at the UAV for the paired DS enabled victims. From a comparison of the results, we can see that the proposed solution is very close to the theoretical values, which shows the correctness and feasibility of our proposed approach. In addition, the proposed technique can be treated as a general method to solve the DS enabled UAV trajectory planning problem. Since the theoretical analysis is not always easy to undertake, due to the complex network topology, the proposed approach provides a practical way to get close to the ground true optimal value.
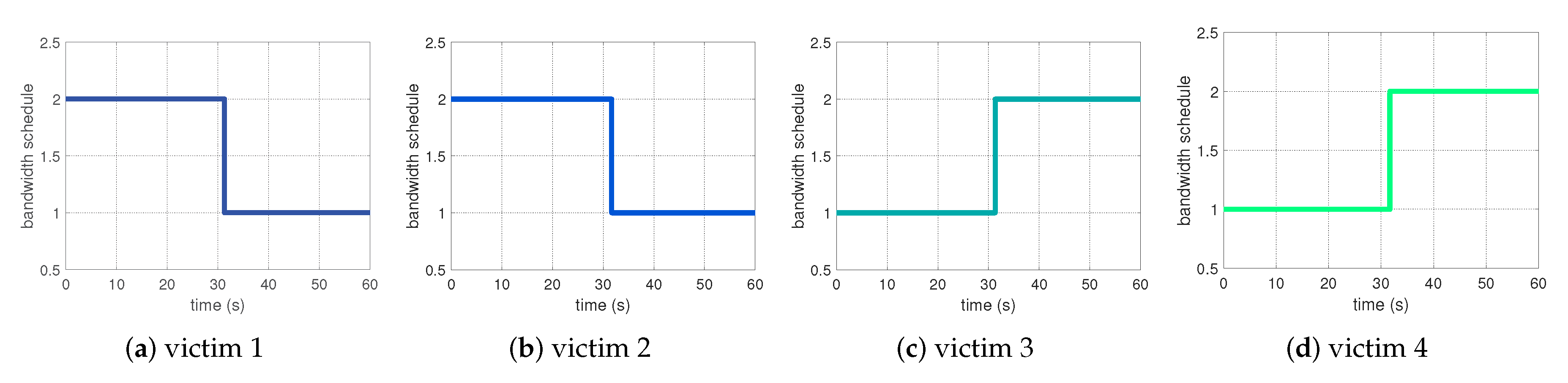
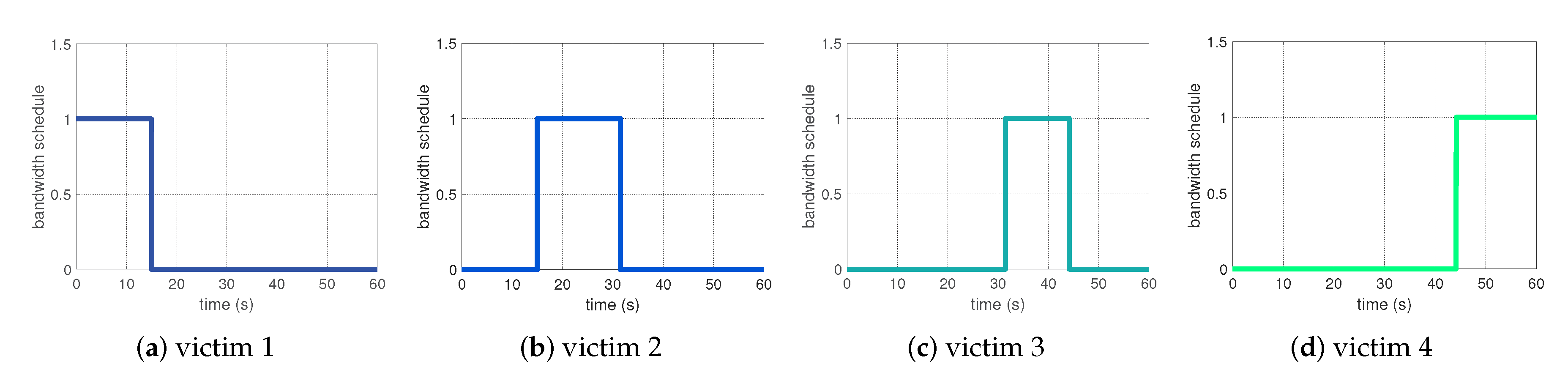
Figure 4 and
Figure 5 show the bandwidth schedule for each victim in the DS method and non-DS bandwidth contention scheme, respectively. In the DS scheme, victim 1 and victim 2 are supported by the DS method first, then victim 3 and victim 4 are supported by the DS method. However, in the non-DS bandwidth contention scheme, from victim 1 to victim 4, each of them occupies the bandwidth sequentially. The bandwidth schedule configurations are delivered to the victims by the UAV via control signals.
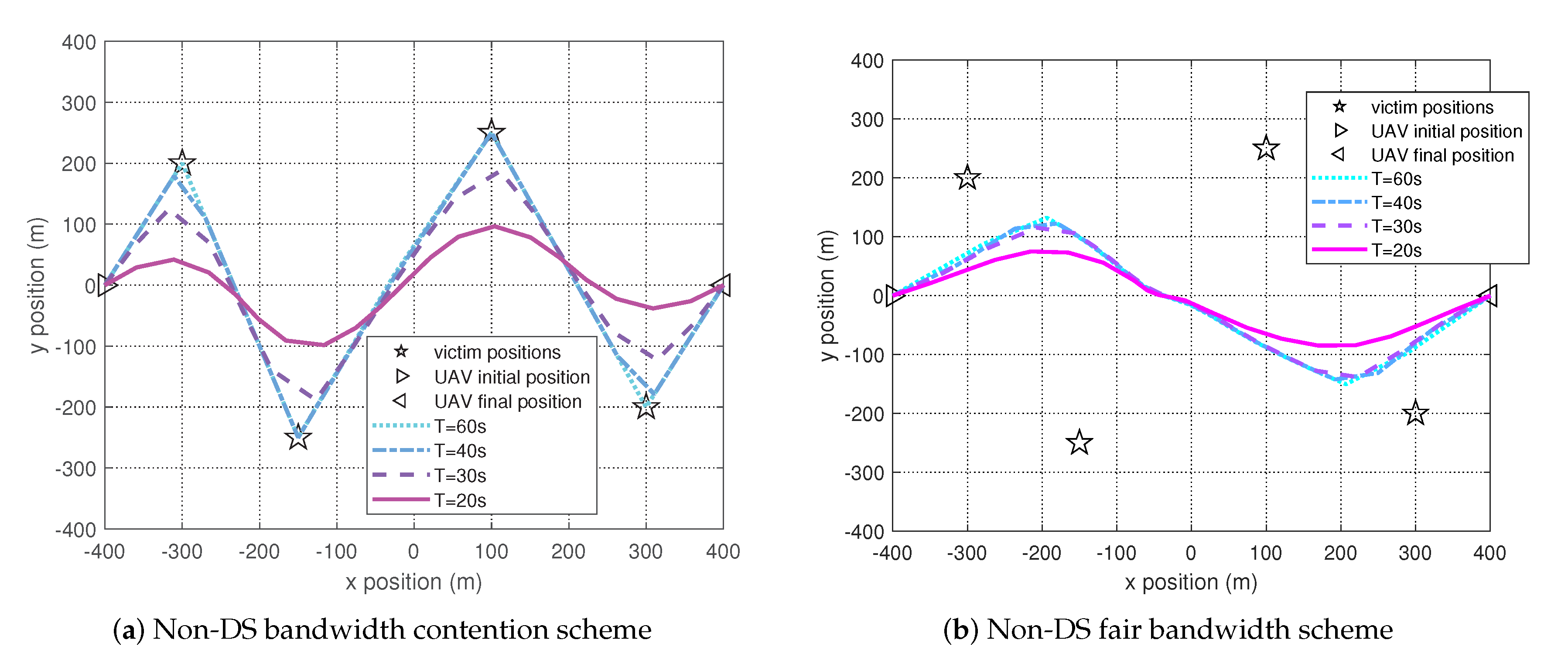
Figure 6a shows the optimal trajectories for the non-DS bandwidth contention scheme for different
T values. As the period
T decreases, the maximum distance that the UAV can traverse between the initial and final positions decreases, thus the UAV flight trajectory eventually becomes unable to reach every victim. However, the UAV tries to approach each victim as close as possible. Meanwhile, the channel gain worsens as the distance between the UAV and victim is increasing, hence resulting in a decrease of the optimal max-min average data rate.
Figure 6b shows the optimal trajectories for the non-DS fair bandwidth allocation scheme for different
T values. The optimal average data rate for the non-DS fair bandwidth allocation scheme decreases slightly as the period
T decreases. This is because that in the non-DS fair bandwidth allocation scheme, the UAV flies along a trajectory where the distances from each victim to the UAV do not vary much. The length of the resulting trajectory is covered by the maximum UAV traverse distance under different
T. Therefore the change of
T slightly changes the optimal UAV flight trajectory.
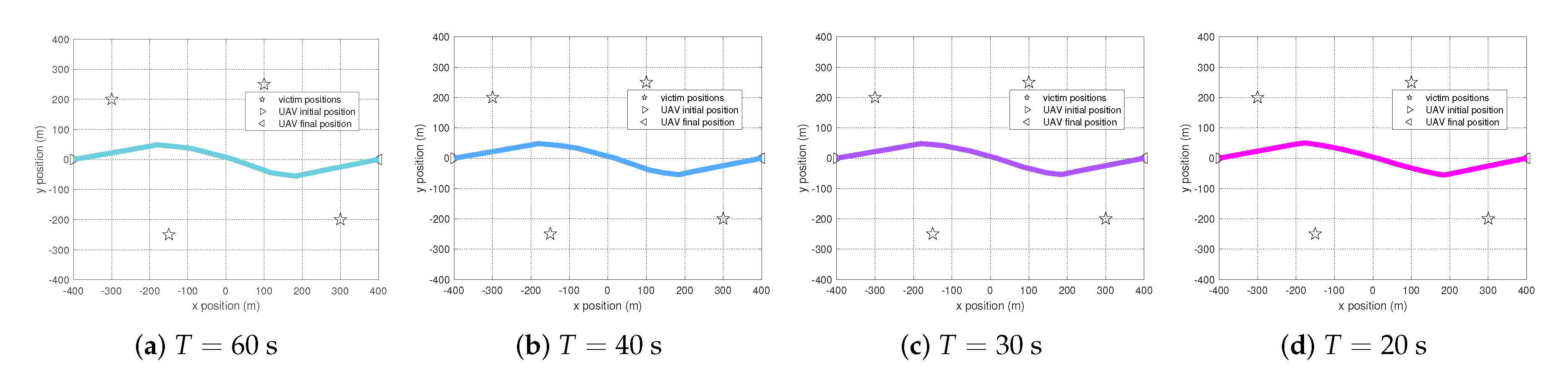
Figure 7 shows the optimal trajectories for the DS method for different
T values. The change of the period
T only changes the optimal average data rate slightly. In the DS method, the UAV is likely to fly at the positions that are the same distance to both of the DS supported paired victims, as discussed in the theoretical analysis. The maximum UAV traverse distance under different
T values can cope with this kind of trajectory. Hence the change of
T only slightly affects the UAV flying trajectory.
Next, we compare the propulsion energy consumed by the UAV for different schemes. As derived in Reference [
27], the propulsion power consumption for a rotary-wing UAV in a time slot can be modelled as
where
is the constant flight speed of the UAV in a time slot.
and
represent the blade profile power and induced power in hovering status, respectively.
denotes the tip speed of the rotor blade,
is known as the mean rotor induced velocity in hover, and
and
s are the fuselage drag ratio and rotor solidity, respectively.
and
A denote the air density and rotor disc area, respectively. Therefore, the propulsion energy in a time slot is
. Furthermore, the overall propulsion energy of the UAV is
We assume that
W,
W,
m/s,
m/s,
,
kg/m
3,
, and
m
2 [
28]. Based on the optimal UAV trajectory derived for different schemes, the overall propulsion energy consumed by the UAV is listed in
Table 2. On observing the results, for shorter time periods, that is when
s, 30 s, and 20 s, the DS method consumes most propulsion energy, while the non-DS fair bandwidth allocation scheme consumes least propulsion energy. In the DS method, the UAV hovers for the longest time, and in the two non-DS schemes, it hovers for much less time. When the UAV flying speed is less than around 40 m/s, it consumes most power when remains in the hovering status [
28]. This is why the UAV consumes most propulsion energy in the DS method. However, for a longer time period, when
s, the non-DS bandwidth contention scheme consumes most propulsion energy. This is because the UAV hovers at the position of each victim sequentially. The DS method consumes more energy than the non-DS fair bandwidth allocation scheme, but with higher max-min average data rate among all the victims.
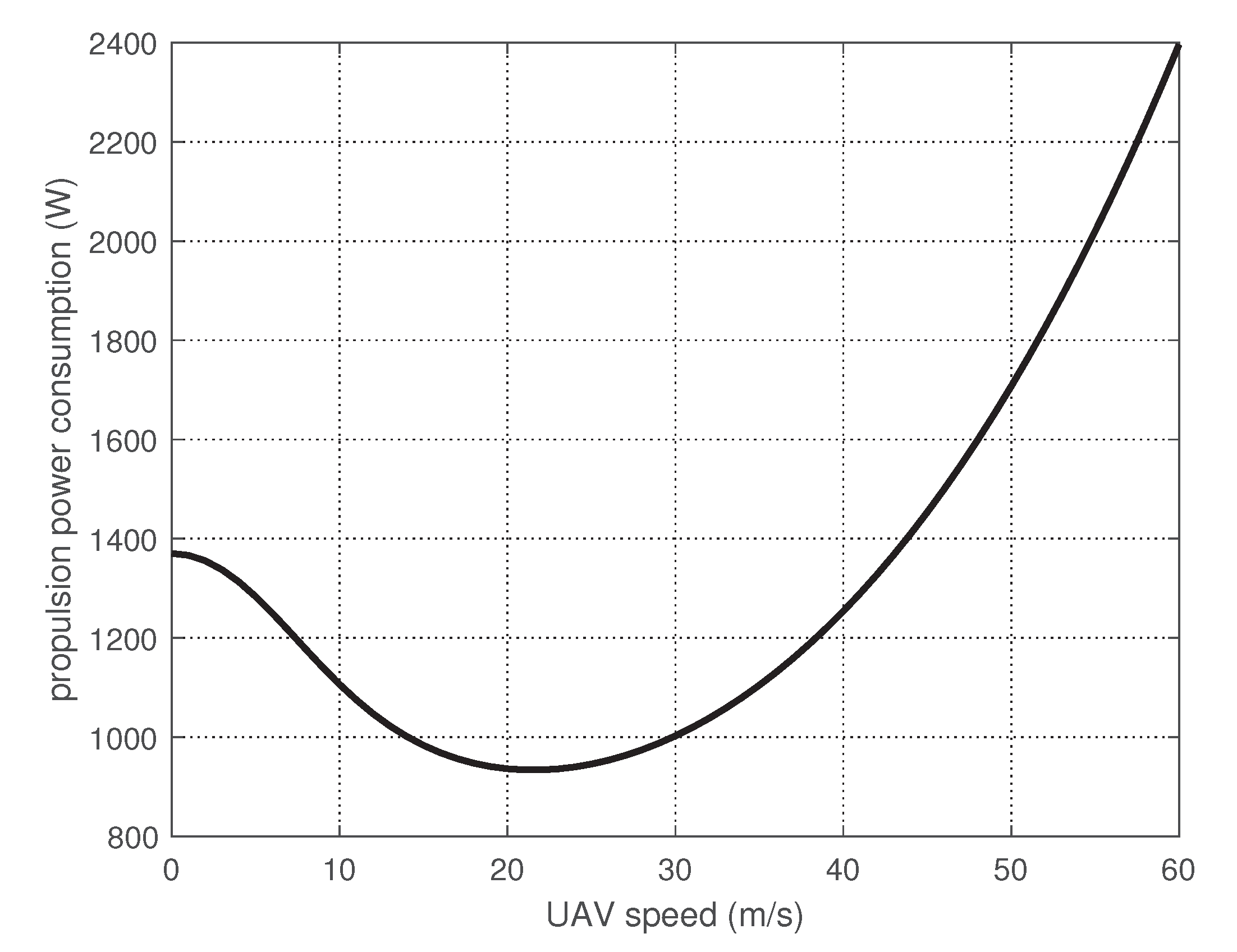
To better understand the relationship of propulsion power and the speed of UAV, we plot
Figure 8 with the same parameters configured in the simulation. By observing the curve, the minimum power consumption is at a UAV speed of around 20 m/s rather than when hovering, at 0 m/s. Hence in order to reduce the propulsion energy consumption for the DS method, we replace the hovering status with a circular movement with a relative small radius at a speed of 20 m/s. By providing a small angular UAV movement, the propulsion energy needed to provide sufficient lift is appreciably reduced as shown in the last row of
Table 2.
6. Conclusions
In this paper, we consider a dual sampling bandwidth efficient transmission technique in regard to the UAV flight trajectory, so as to maximize the minimum data transmission throughput among all the victims. In order to solve the problem, we propose an iterative algorithm which alternately optimizes the victim bandwidth scheduling and UAV trajectory. In addition, power balance is implemented in each iteration of the algorithm for supporting the DS method. We compare the DS scheme with two non-DS schemes, that is, a fair bandwidth allocation scheme and a bandwidth contention scheme. The DS scheme outperforms the non-DS schemes in terms of the optimal max-min average data rate among all the victims. The theoretical analysis reveals that the proposed solution is very close to the ground true optimal value. The optimal UAV flight trajectory for the DS scheme is different from the non-DS bandwidth contention scheme and non-DS fair bandwidth allocation scheme, as the UAV flies to positions that are not necessarily close to each victim. The UAV trajectory derived by the proposed algorithm is pre-configured before the UAV is dispatched and we assume the UAV is explicitly guided to follow the optimal trajectory. In regard to the UAV propulsion energy consumption, for shorter time periods, the non-DS fair bandwidth allocation scheme consumes the least energy. For longer time periods, the DS method consumes the second least energy but achieves the highest max-min average data rate among all victims. However, if the UAV hovering episodes are replaced by small circular movements, the propulsion energy consumption for DS method can be significantly reduced.
Moreover, the assumption that the UAV starts and ends at fixed locations is reasonable. As in a disaster scenario, maybe only some certain places are able for launching and landing the UAV. In addition, a feasible path can be either a straight line, a circular curve or in other types, as long as the UAV can follow this path to fly through the area to connect all the victims. Meanwhile, a feasible path helps the staff collect the UAV back.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}