1. Introduction
Industry 4.0 has become a synonym for the next revolution that will enable companies to manufacture, enhance, predict, and distribute their products. The availability of new technologies, fuelled by the advances in the Internet of Things (IoT), Artificial Intelligence (AI), predictive analytics, and cloud computing, has allowed a paradigm shift, where services, hardware, and software offerings have been integrated into industry practices. Furthermore, advanced sensors, embedded software, and robotics can be seamlessly integrated to extract and identify actionable information from data to inform and facilitate an improved decision-making process. A notable consequence is increased automation, with the aim of achieving an increased level of self-sustained efficiency and optimised responsiveness to new opportunities, as well as proactively adapting and addressing new challenges.
Developing smart industry processes provides an incredible opportunity for the manufacturing sector to enter the fourth industrial revolution. Analysing the large amounts of big data collected from sensors on the factory floor ensures real-time visibility of manufacturing assets and can provide tools for performing predictive maintenance in order to minimise equipment downtime.
One sector that has been expanding, due to the above emerging technologies that have enhanced automated, sustainable, and cost effective packing solutions, is packing. Smart labelling and Radio Frequency Identification (RFID) tagging, as well as sensor and hardware technologies, are leading the introduction of disrupting packing approaches to integrate real-time and historical information to enhance the overall process.
Three-Dimensional Picking and Packing are important operations in the field of logistics and supply chain management, especially in the context of Industry 4.0. Three-Dimensional Picking refers to the process of selecting and retrieving items from a storage space, such as a bin, a shelf, or a pallet, using a robotic manipulator or a human operator. Three-Dimensional Packing refers to the process of arranging and placing items into a container, such as a box, a pallet, or a truck, using a packing algorithm that optimises some criteria, such as space utilisation, stability, or load balancing.
Furthermore, sustainability within the packing industry is attracting increasing attention, from both the academic and the industry communities, due to the positive environmental impact, as well as optimised cost effectiveness.
Traditional packing approaches tend to be negatively affected by various factors, such as rising material costs, environmental issues, and limited opportunities for automated and optimised activities and services.
However, effectively packing products is based on several parameters, including (but not limited to) the volume and shape variability of the containers and pallet supports, and weight, height, width and, length constraints and requirements. The packing order plays an important role, as this would optimise the overall process, whilst enhancing its speed and potential automation.
This survey article aims to discuss the main techniques, methods, and frameworks that are relevant to enhanced packing. The rest of the article is structured as follows:
Section 2 discusses the main methodology utilised in this article.
Section 3,
Section 4 and
Section 5 contain the discussion on the main components relevant to product packing, including different computational and theoretical algorithms and frameworks and corresponding implementation and deployment.
Section 6 describes the implementation of an automated extraction and analysis of large textual data sources identified in a similar manner as per the manual assessment described in the previous sections. The aim is to identify concepts and mutual relationships that can be extracted via natural language processing (NLP) tools. Finally,
Section 7 concludes this work and prompts new research directions.
2. Review Objectives and Methodology
To ensure a systematic approach to finding and selecting relevant material, this study adopted the PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) methodology. PRISMA is a widely used method for collating empirical evidence that fits pre-defined selection criteria to answer specific research questions. The main aim of this survey article was to explore research trends and challenges in product routing and loading approaches within the Industry 4.0 context [
1]. More specifically, we aimed to answer the following research questions:
- RQ1:
How do volumetric techniques contribute to the optimisation of product routing and loading processes in the context of Industry 4.0?
- RQ2:
What are the Industry-4.0-driven real-world applications that benefit from the utilisation of 3D Bin Packing and volumetric techniques in product routing and loading?
- RQ3:
In the context of Industry 4.0, how can volumetric-based approaches be enhanced to further improve the efficiency of product packing and routing, while minimising computational demands
- RQ4:
What Industry-4.0-specific challenges and constraints are associated with the application of volumetric methods in 3D Bin Packing, and what strategies can be employed to address these challenges effectively?
Figure 1 presents the PRISMA workflow followed for identification, screening, and selection of the reviewed sources.
2.1. Literature Sources and Search Strategy
This study considered three major databases, namely Scopus (
https://www.scopus.com, (accessed on 6 December 2023)), IEEE Xplore (
https://ieeexplore.ieee.org/, (accessed on 6 December 2023)), and MDPI (
https://www.mdpi.com/, accessed on 6 December 2023), due to their interdisciplinary and multidisciplinary nature within the science subjects. Further resources were also considered; however, it was noticed that they identified several duplicated items as well as partially relevant one. Therefore, to ensure consistency, only the above online tools were utilised.
To ensure all relevant literature was retrieved, search strings were devised based on the primary keywords/concepts, that are
Industry 4.0;
3D packing;
Bin packing;
Container packing;
Packing heuristics.
A set of secondary keywords included terms that can be used interchangeably with the primary key words. Combining primary keywords with the secondary ones as well as with supporting terms such as challenges, solutions, techniques, strategies, optimisation, etc. with OR and AND Boolean operators formed the search strings.
Table 1 presents the full set of search strings used. This process was performed in October 2023.
2.2. Eligibility Criteria
The eligibility of the retrieved articles to be reviewed was defined based on the inclusion and exclusion criteria that aligns with the study objectives. Articles that met one or more of the following inclusion criteria were selected for the review:
Studies on 3D Picking and Packing for product routing and loading processes;
Applications within the logistics sector with possible solutions for Industry 4.0 challenges;
Studies focusing on product packing and routing while minimising computational demand.
Studies that met one or more of the following exclusion criteria were not selected for the review.
Not relevant to 3D Bin Packing or Container Loading;
Not relevant to logistics;
Studies focusing on other industries rather than logistics.
2.3. Study Selection and Analysis
Literature retrieval and study selection was completed in four stages in accordance with the PRISMA protocol (
Figure 1). The search was conducted in three different databases with the following filters:
Studies conducted within last 10 years, from 2013 onwards, due to the focus on Industry 4.0;
Only peer-reviewed journal articles and conference proceedings, i.e., books, editorials, patents, and theses were filtered out;
Articles available in English.
With those filters on, using the pre-defined search strings, a total of 907 publications were retrieved, 419 from Scopus, 320 from IEEE Xplore, and 168 from MDPI. Once duplicates were removed, a total of 739 articles were screened based on the title, abstract, and conclusion. Papers that were not fully accessible were also removed at this stage. Screening resulted in the removal of 670 papers, leaving us with 69 studies to be assessed for the eligibility criteria. All 69 articles were retrieved, read, and assessed based on the inclusion and exclusion criteria, as well as on rigour and relevance of the research. At the end of this phase, only 60 papers were selected for the final review.
In alignment with our research questions, we carried out an in-depth analysis of the selected studies with the focus on specific techniques, algorithmic approaches, and technological solutions used, as well as evaluating the impact of Industry-4.0-led solutions on the real-world applications.
3. Industry 4.0
Industry 4.0, also known as the Fourth Industrial Revolution, is a transformative concept initially introduced by the German government to encapsulate a set of technological changes in manufacturing. Its primary goal is to maintain the global competitiveness of the industrial sector by introducing automation and data exchange into manufacturing technologies [
2].
Industry 4.0 represents the current trend of automation and data exchange in manufacturing technologies, including cyber-physical systems, the Internet of Things (IoT), and cloud computing, and it is gaining significant interest across academia and international companies, evolving into a new business model characterised by disruptive technologies. Industry 4.0 creates what has been called a “smart factory”, where cyber-physical systems monitor the physical processes of the factory and make decentralised decisions [
3]. This section provides a brief overview of Industry 4.0, its core elements, design principles, and its potential relevance to volumetrics solutions, including the 3D Bin Packing Problem and its variants.
3.1. Definition and Core Elements
The term “Industry 4.0” has gained popularity, but its precise definition remains elusive, resulting in various interpretations. In their review of 675 selected papers, Nosalska et al. [
4] established a definition framework for Industry 4.0 as a complex and multifaceted concept that involves the integration of digital technologies and physical systems in the industrial sector. The core elements of Industry 4.0 include Smart Factory, Smart Products, Business Models, and Customers. These elements interact with each other to create a networked, flexible, and dynamically self-organising manufacturing system. The literature also emphasises terms like Value Chain, Cyber-Physical Systems (CPS), IoT, new technologies, such as Artificial Intelligence and Big Data, and Customisation.
3.2. Design Principles
These principles help systemise knowledge and offer practical solutions for implementing Industry 4.0, forming the basis of Industry 4.0 design theory. However, while various design principles exist, including Interoperability, Flexibility, Real-Time Capability, Decentralisation, Modularity, and more, scholars may not always explicitly label them as “principles”, even though they use them to enhance their understanding of Industry 4.0 [
4].
3.3. Volumetrics Solutions and Their Relevance
Volumetrics solutions, such as 3D Bin Packing, Container Loading, and Cross-Docking, have significant potential in the context of Industry 4.0. We believe these techniques can contribute to the optimisation of manufacturing processes, supply chain efficiency, and customer satisfaction. However, they also present challenges and constraints, such as balancing, priority, fragility, and others. These challenges can be addressed by leveraging Industry 4.0 technologies, such as IoT, Artificial Intelligence, Big Data, and Robotics.
4. Volumetrics
In this section, the main components and architectures related to Volumetrics are introduced and discussed.
4.1. Optimisation Problems: Container and Pallet Loading Problems
The Container Loading Problem (CLP) is a combinatorial optimisation problem that focuses on efficiently packing a heterogeneous set of items or boxes into one or more containers of a fixed size, with the objective of maximising space utilisation or minimising the number of containers used. The primary goal is to find an arrangement of the items within the container(s) that optimises a specific objective function, often related to space efficiency [
5,
6,
7]. This problem is of practical importance in the field of logistics and transportation, where efficient cargo loading can lead to cost savings and improved overall supply chain efficiency [
8,
9,
10]. There are different variants of the CLP, including the Pallet Loading Problem, and the 2D and 3D packing problems. In 2D variants, only the length and width of items and the container are considered, while in 3D variants, the height or depth of items and the container are also taken into account [
11].
The CLP has a wide range of practical applications, including optimising cargo loading in shipping containers, loading items into storage spaces, and even in the layout design of warehouses and transportation vehicles [
8]. Solving the CLP is NP-hard, which means that finding an optimal solution is a computationally challenging task due to its combinatorial nature and the need to consider various constraints [
5,
11]. These constraints encompass container-related factors such as weight limits and weight distribution, item-specific considerations like loading priorities, orientations, and stacking limits, cargo-related constraints regarding parcel completeness and item allocation, and positioning constraints for hazardous items, relative positioning, and multidrop scenarios, as well as load-related constraints, focusing on cargo stability and operational complexity [
12]. Different algorithmic, heuristic, and metaheuristic approaches are commonly used to find near-optimal or optimal solutions to this problem, depending on the specific objectives and constraints of the problem instance [
13,
14].
4.2. 3D Bin Packing Problem
Parallel to the CLP, the 3D Bin Packing Problem (3D-BPP) exhibits notable similarities while featuring two fundamental distinctions. The first point of divergence lies in load balancing, a trait often shared between the Pallet Loading Problem and 3D-BPP. In these scenarios, containers are generally not designed to accommodate unbalanced loads, necessitating a focus on equitable weight distribution [
15].
Conversely, the second notable deviation pertains exclusively to 3D-BPP. This discrepancy arises from the existence of two primary variants: the offline 3D-BPP, which bears semblance to the Pallet Loading Problem, and the online 3D-BPP. The latter represents a dynamic perspective where items arrive sequentially, and real-time calculations are required for the positioning of each item, as they are not known in advance. This dynamic approach contrasts with the offline version, where all items and container information are available in advance. These distinctions underscore the unique challenges and considerations associated with the 3D-BPP, setting it apart from its container and pallet variations [
15].
In a recent study [
16], notable variations in the Online 3D-BPP have been introduced, aptly named “Non-Deterministic Ordered Packing” (NDOP) and “Quasi-Online Packing” (QOP). NDOP encapsulates the intricate task of handling irregularly shaped items arriving in an unpredictable order. In CLP scenarios, the sequence for item placement is pre-defined, yet NDOP introduces an element of uncertainty into this sequencing, increasing the complexity. The main challenge is to efficiently pack odd-shaped items into containers while dealing with the uncertainty of when each item will arrive.
In contrast, QOP tackles scenarios where the order of item arrivals is unknown, but it retains some flexibility in the packing process. Unlike immediate online packing, QOP accommodates the non-deterministic arrival sequence, aiming to optimise the packing arrangement with a certain degree of adaptability. This concept addresses the challenge of efficiently placing items into containers when dealing with unpredictable arrival orders, striking a balance between adaptability and efficiency [
16].
4.3. Cross-Docking and Its Role in Industry 4.0
Cross-docking is a pivotal operation within modern supply chain management, especially in the context of Industry 4.0. This logistics practice involves the streamlined movement of goods through a distribution centre, reducing storage time and enhancing efficiency [
17].
In an Industry 4.0 framework, cross-docking plays a critical role in optimising the flow of products. Technologies such as the Internet of Things (IoT), Big Data, and Robotics have revolutionised cross-docking operations. The optimisation of mixed pallets further enhances the efficiency of cross-docking, by reducing the number of pallets required and minimising the use of space, aligning with the lean and efficient principles of Industry 4.0 [
17].
Cross-docking operations, in the context of Industry 4.0, are becoming smarter and more responsive. IoT devices and sensors provide real-time data on inventory, enabling predictive maintenance and efficient routing, while robotics and automation streamline the movement of goods within the facility, reducing human error and increasing speed. By aligning cross-docking with Industry 4.0 principles, businesses can achieve greater agility, adaptability, and competitiveness in the modern era of logistics and manufacturing [
17].
4.4. Balancing, Priority, Fragility, or Other Constraints
Multidimensional bin packing is a critical logistics challenge that requires efficient placement of items within containers, taking into account various constraints to ensure safety, stability, and overall efficiency during transportation. A synthesis of findings from 16 studies reveals a common thread of constraints that researchers consider in solving these complex packing problems.
Balancing constraints are a fundamental consideration in many of the discussed papers. These constraints focus on achieving balanced weight distribution, volume distribution, or the distribution of centre of mass among containers or bins. Maintaining such equilibria is essential to prevent overloading and maintain stability during transport [
17,
18,
19,
20].
Priority constraints also play a pivotal role in scenarios where specific items demand special handling due to factors like fragility, value, or time-sensitivity delivery. These constraints guide the packing strategy, ensuring that high-priority items are placed with care and precision [
16,
21,
22,
23].
Breakability constraints are addressed in several papers, emphasising the need to protect fragile items during transportation. These constraints call for thoughtful arrangements and protective measures to minimise the risk of damage [
12,
14,
15,
24].
Stability constraints, especially in the context of logistics and shipping, ensure that items are placed in a way that prevents shifting or toppling during transit [
14,
21,
24,
25]. Space utilisation constraints are another common theme across studies, where efficient space usage within containers is a primary goal, as this can contribute to increased stability.
Item rotation or orientation constraints play a crucial role in multidimensional bin-packing problems, where items or boxes come in various shapes and sizes. These constraints pertain to how each box can be oriented or rotated within a container or bin; however, these can contribute to increased complexity [
15,
22,
26,
27]. Other constraints like dimension, weight, and volume are considered in most studies to address the unique requirements of different scenarios. These constraints collectively form a comprehensive framework for tackling multidimensional bin-packing problems, highlighting the complexity and adaptability required to address real-world packing challenges [
12,
15,
16,
28].
4.5. Algorithmic Approaches
In this section, a comprehensive discussion on the algorithmic approaches to product packing is carried out. The discussion is divided into the main approaches that have been extensively utilised in this context.
4.5.1. Application of Greedy Algorithms
Aiming to gain insights into the versatility and limitations of Greedy Algorithms, we delve into six distinct studies to examine how Greedy Algorithms are employed in resolving complex combinatorial problems.
The study presented by Ábrahám et al. [
29] primarily focuses on the application of Greedy Algorithms to tackle specific instances of the bin-packing problem, particularly for the Schwerin and Falkenauer U benchmark classes. Their study showcases the efficacy of Greedy Algorithms in providing efficient solutions for a substantial percentage of instances within these classes. Notably, the Greedy Algorithm achieves optimal solutions for all instances in the Schwerin class and approximately 91% of the instances in the Falkenauer U class. Additionally, their introduction of pre-processing procedures simplifies subsequent packing processes.
Another study, primarily focused on solving the Container Loading Problem (CLP), proposes a heuristic algorithm that leverages a multiphase Greedy Strategy. It begins by assuming that items in a layer must share the same shape, employing a systematic approach of creating good layers out of high-quality stacks, and packing these stacks into containers. It exhibits versatility, with the potential for application in the Pallet Loading Problem and the 3D Bin Packing Problem (3D-BPP) [
6].
The Greedy Algorithm is also presented as a core component of solutions proposed by two studies [
9,
12] to address a spectrum of packing problems, including the CLP, the Pallet Loading Problem, and the 3D-BPP. The main difference between the two solutions is that the authors of the 2014 study [
9] propose a Heuristic Binary Tree Search Method (HBTS), which iteratively selects items to be loaded into the container, considering specific criteria, such as item dimensions and other constraints. A similar solution, although primarily focused on the solution of the CLP, presented in another 2014 study [
25] proposes the use of a Greedy Algorithm, specifically the Deepest Bottom Left with Fill (DBLF), as part of its hybrid approach. The authors employ the DBLF to generate initial solutions for the CLP.
The Greedy Randomised Adaptive Search Procedure (GRASP) is proposed by a recent study [
30] to address the 3D-BPP and the Vehicle Routing Problem (VRP). The authors’ GRASP algorithm plays a crucial role in creating initial solutions for these problems. By employing a constructive phase that forms clusters of customers based on their distances to the warehouse, the algorithm introduces randomness to the clustering process, enhancing the exploration of solution spaces. The paper does not explicitly discuss alignment with the Industry 4.0 framework, but the efficient packing and routing it entails hold relevance to Industry 4.0’s goals.
4.5.2. The Three-Dimensional Double Travelling Salesman Problem with Multiple Stacks
The Double Travelling Salesman Problem (DTSP) is a well-known and challenging combinatorial optimisation problem that has significant relevance in logistics, transportation, and supply chain management. It is an extension of the classic Travelling Salesman Problem (TSP), a problem of finding the shortest closed tour that visits a set of given locations exactly once. The DTSP introduces an additional layer of complexity by requiring two salesmen to find their individual shortest routes while covering the same set of locations [
10].
The DTSP has attracted considerable attention in the field of operations research due to its real-world applications in various domains. One such extension of the DTSP is the Three-Dimensional Double Travelling Salesman Problem with Multiple Stacks (3L-DTSPMS), a problem introduced by Ruan et al. [
10]. In this advanced variant, the salesmen are tasked with optimising their routes in a three-dimensional space that includes container-loading constraints with multiple stacks. This problem extends beyond simple route optimisation and dives into the complexities of practical logistics operations where bulky items must be efficiently loaded into containers.
The incorporation of container-loading constraints with multiple stacks introduces a set of challenges, including the need for intelligent loading strategies and considerations for the stability and blocking relationships of loaded items. To address these challenges, the authors propose the utilisation of the k-means clustering algorithm as a component of their Improved Genetic Algorithm (IGA) [
10]. This algorithmic approach aims to enhance the optimisation of delivery and loading routes by leveraging clustering techniques to group related items together.
In the context of the 3L-DTSPMS, the k-means clustering algorithm plays a pivotal role in several stages of the optimisation process. Initially, it contributes to the generation of an approximate optimal delivery route within the Genetic Algorithm framework. Subsequently, the algorithm aids in optimising the loading route, considering the independence of pickup warehouses and the potential blocking relationships between items in the loading and delivery routes. The k-means clustering algorithm, coupled with heuristics, facilitates the regeneration of the loading path to align it with the current delivery route.
4.5.3. Mixed-Integer Linear Programming (MILP)
The use of Mixed-Integer Linear Programming (MILP) is proposed by Trivella and Pisinger [
19] to solve the load-balanced multidimensional bin-packing problem (LB-MBP), which is a variant of the 3D Bin Packing Problem that considers both packing and balancing objectives, and it is also proposed by Erbayrak et al. [
18] to solve the 3D Bin Packing Problem with balancing constraints.
Similarly, a study presented by Tresca et al. [
31] proposes the use of MILP to solve the 3D-BPP. Their solutions align with Industry 4.0 frameworks as they leverage data analytics and optimisation techniques to improve the efficiency and quality of manufacturing processes. The model presented by Tresca and co-authors [
31] was tested on both realistic and industrial data, including scenarios provided by a logistics company, which aligns with Industry 4.0 focus on real-world implementations of advanced technologies. Industry 4.0 often involves the use of digital twins, which are virtual representations of physical assets or systems. In a study presented by Hasachoo et al. [
28], the use of MILP to model and optimise the container-loading process can be seen as a form of digital twinning. The model represents the physical process, and MILP allows for virtual experimentation and optimisation of packing patterns before actual execution.
4.5.4. Biased-Random-Key Genetic Algorithm (BRKGA)
The Biased-Random-Key Genetic Algorithm (BRKGA) is a novel approach that combines Genetic Algorithm principles with the concept of random-key representation. In essence, it follows the standard Genetic Algorithm framework, encompassing phases such as initialisation, selection, crossover, mutation, and fitness evaluation. This systematic process allows for the evolutionary refinement of solutions across generations, progressively enhancing the quality of packing arrangements, as highlighted by two studies [
32,
33].
In their work, proposed to solve the 2D and 3D packing problems, Gonçalves et al. [
32] introduce an inventive fitness function to assess solution quality, demonstrating the algorithm’s flexibility and adaptability. Meanwhile, Zheng et al. [
33] employ the BRKGA to address multiple packing problems, including the Container Loading Problem (CLP), Pallet Loading Problem (PLP), and 3D Bin Packing Problem (3D-BPP). The algorithm uses a unique approach by representing solutions as vectors of random numbers, referred to as random keys. These random keys are mapped to feasible solutions in the packing problems.
The distinctive feature of the BRKGA, setting it apart from traditional Genetic Algorithms, is the introduction of bias during the selection of parents in both crossover and mutation phases. This bias is strategically designed to favour the selection of specific random keys that exhibit the potential to yield superior solutions. By doing so, the algorithm steers itself towards the convergence of high-quality solutions, a noteworthy characteristic for optimising packing scenarios. Additionally, the incorporation of a Fuzzy Logic Controller (FLC) further enhances the algorithm’s efficiency by dynamically adjusting parameters to adapt to the evolving problem landscape, as described by Zheng and co-authors [
33].
4.5.5. Monte Carlo Tree Search
In the context of solving the 3D-Bin Packing Problem (3D-BPP), the application of the Monte Carlo Tree Search (MCTS) algorithm has proven to be a pivotal technique in various research approaches.
In their study [
22], Puche et al. harness MCTS as a cornerstone of their 3D-BPP solution driven by reinforcement learning. MCTS, known for its ability to navigate combinatorial spaces represented as trees, offers an effective strategy for decision making. In the context of 3D-BPP, the nodes of this tree represent different problem states or configurations. Notably, the authors adapt the AlphaGo algorithm for operation in single-player and score-based scenarios. They introduce a buffer to facilitate multi-item action selection and employ a data augmentation strategy. This comprehensive approach demonstrates MCTS’s adaptability and potential in reinforcement-learning-driven solutions for complex optimisation problems.
The study by Wu and Yao [
34] introduces MCTS as a key component of another approach to tackle the 3D-BPP, specifically under incomplete information. The algorithm begins by selecting the most optimal node at the current state to expand the search tree. Subsequently, it conducts simulations to evaluate potential outcomes of various actions, which, in the context of 3D-BPP, equates to estimating the effectiveness of stacking actions. The outcomes of these simulations play a pivotal role in updating the status of nodes in the search tree. This information is then propagated back up the tree, informing the selection process in subsequent iterations. In this way, MCTS enhances the decision-making process, especially in scenarios where information is not complete, and decisions must rely on estimating outcomes.
MCTS’s efficiency and forward-looking capabilities are leveraged in the 3D-BPP solution presented by Jia et al. [
35]. In a unique integration, MCTS collaborates with a robotic system tasked with packing objects into pallets. This application of MCTS in a robotic context is particularly valuable for its ability to simulate potential future moves and evaluate their consequences. In the context of packing, it means considering how placing an object in a specific location may impact the available space for subsequent objects, thereby optimising the packing process and enhancing efficiency.
4.5.6. Matheuristics
Two studies [
30,
31] employ matheuristics, a hybrid approach blending mathematical precision with heuristic ingenuity, to solve optimisation problems, while both studies align with key aspects of Industry 4.0, such as transportation optimisation, automation, efficiency, and scalability, they differ in their scopes and methodologies.
The study conducted by Moura et al. [
30] takes a comprehensive approach, addressing a wide range of packing challenges, encompassing the Container Loading Problem (CLP), Pallet Loading Problem (PLP), and the 3D Bin Packing Problem (3D-BPP). This study leverages mathematical programming models to handle the Vehicle Routing Problem with Simultaneous Delivery and Pickup and Time Windows (VRPSDPTW) in addition to the 3D-BPP.
In contrast, the research conducted by Tresca et al. [
31] is more specialised, concentrating specifically on the intricacies of the 3D-BPP. Here, the problem is formulated as a mixed-integer non-linear programming (MINLP) challenge, highlighting the study’s precision in addressing this specific packing problem.
4.5.7. Constrained Markov Decision Process (CMDP)
Two reviewed studies [
22,
36] tackle the Online 3D Bin Packing Problem (3D-BPP) using Constrained Markov Decision Processes (CMDPs). The CMDP is an extension of traditional Markov Decision Processes (MDPs) that accommodates constraints. In the context of 3D-BPP, these constraints relate to the order dependence of items and the imperative for physical stability during the packing process.
The approach presented by Zhao et al. [
36] introduces a novel application of CMDP, leveraging it to guide the reinforcement learning process. Their use of CMDP facilitates the modelling and resolution of the intricate 3D-BPP with inherent constraints. The integration of a 2D height-map representation enhances the learning process, enabling effective policy optimisation. Additionally, the incorporation of Monte Carlo Tree Search (MCTS) for handling multiple look-ahead items contributes to the adaptability of their proposed approach.
Conversely, Puche et al. [
22] adopt a model-based strategy inspired by AlphaGo. Their CMDP formulation assumes a deterministic transition model, representing the bin state through a height map. The policy network is central to their approach, providing placement probabilities based on the height map and item dimensions. The method addresses single-item, item reorientation, and multi-item scenarios with a buffer, showcasing its versatility.
4.5.8. The Pareto-Based Approach
The Pareto-based principle is applied to handle the inherent multiobjective nature of CLP, wherein conflicting objectives, such as space utilisation and total box value, need simultaneous optimisation.
In the work of Zheng et al. [
33] a Multi-Objective Genetic Algorithm (mompGA) is used. The algorithm optimises container space utilisation and the total value of loaded boxes concurrently. Notably, the authors employ adaptive weights to dynamically balance the importance of the two objectives during optimisation. The use of a multipopulation strategy and tracking convergence over multiple generations contributes to the algorithm’s superior performance.
Conversely, Phongmoo et al. [
13] introduce the Artificial Bee Colony (ABC) algorithm for solving the multiobjective three-dimensional single-container loading problem. The ABC algorithm, inspired by the foraging behaviour of honeybees, is integrated with a Pareto-based approach. The authors address complex constraints such as box rotation and non-overlapping boxes in their mathematical model. Optimal parameters for the ABC algorithm are identified using the LINGO optimisation solver.
The integration of adaptive weights in mompGA allows for dynamic adjustment of focus during optimisation, providing flexibility in handling trade-offs between conflicting objectives. In contrast, the ABC algorithm relies on identifying optimal parameters through an external optimisation solver.
4.5.9. Proximal Policy Optimisation (PPO)
Whereas Yang et al. [
37] do not explicitly detail the application of PPO, they reference indirectly incorporating the PPO algorithm within their heuristics DRL framework. In constrast, Que et al. [
11] explicitly employ the PPO algorithm to tackle the Three-Dimensional Packing Problem (3D-PP) with variable height. PPO is a pivotal component of the Deep Reinforcement Learning (DRL) approach adopted for solving this packing problem. The authors provide a comprehensive description of how PPO is applied, including the choice of hyper-parameters and their integration into the training process. PPO is selected as the optimisation algorithm for training the DRL models, engaging both policy and value networks. The policy network dictates the actions, determining how to place the boxes, while the value network assesses the quality of these actions. Notably, the authors carefully set hyper-parameters such as the learning rate, discount factor, and decay factor.
4.5.10. Heuristic Binary Tree Search (HBTS) Algorithm
The application of the Heuristic Binary Tree Search (HBTS) Algorithm, as proposed by Liu et al. [
9] to address the 3D-BPP. The algorithm employs a Branch-and-Bound approach to address the problem of efficiently loading a set of three-dimensional boxes into a container with limited space.
The HBTS algorithm commences by grouping the rectangular boxes into strips, which are subsequently organised into layers. These layers form the foundation for constructing a binary tree. Each node within the binary tree corresponds to a container-loading plan, defined as a set of layers. Notably, these layers can be either perpendicular or parallel to the left side of the container. The traversal of the binary tree aims to identify the solution with the highest total volume of packed boxes. The algorithm meticulously addresses constraints such as full support, orientation, and guillotine cutting. Guillotine cutting, a method employed where cutting is consistently made perpendicular to one of the sides of the items, ensures a systematic approach to accommodating boxes within the container. The termination criterion involves exceeding a predefined computational limit, upon which the best-found solution is returned.
The efficacy of the HBTS algorithm is substantiated by Liu et al. [
9] through computational experiments, comparing its performance with existing methods, and the results manifest that HBTS excels, particularly in strongly heterogeneous instances. The evaluation includes filling rates and computational times, providing a comprehensive assessment of the algorithm’s prowess in diverse scenarios.
4.5.11. Data-Driven Tree Search (DDTS) Algorithm & Convolutional Neural Networks (CNNs)
Aiming to enhance the decision-making process when solving the Container Loading Problem (CLP), the Data-Driven Tree Search (DDTS) algorithm integrates machine learning principles with traditional tree search methods. Notably, Convolutional Neural Networks (CNNs) play a pivotal role in this innovative approach [
38].
The algorithm is trained on a dataset derived from diverse container packing scenarios, allowing it to learn and generalise patterns from past instances. The integration of CNNs facilitates the algorithm in learning intricate representations directly from raw data, alleviating the necessity for explicit feature engineering. The tree search mechanism within DDTS is characterised by an iterative exploration of potential packing configurations. This exploration is guided by learned heuristics derived from the CNN-processed training dataset. The adaptability inherent in this decision-making process contributes substantively to the algorithm’s efficacy, resulting in an improved ability to identify feasible solutions efficiently [
38].
4.5.12. Ternary Search Tree-Based Differential Evolution (TSTDE) Algorithm
The TSTDE is introduced as a novel approach to solving the 3D-BPP. The core innovation lies in the incorporation of a ternary search tree model for generating the initial population in the differential evolution process. Unlike conventional practices, TSTDE avoids the use of upper and lower bounds for trial individuals. Instead, the ternary tree model is leveraged to assess the feasibility of generated solutions, contributing to a unique and adaptive initialisation process. Similar to the termination criterion in HBTS, where it entails surpassing a predetermined computational limit, the developers of TSTDE recognise the difficulty in establishing practical termination conditions and similarly choose a termination approach based on a maximum number of iterations. Key parameters include the maximum number of iterations, crossover probability, scaling factor, and population size [
8].
Experimental results, conducted using Bischoff and Ratcliff instances with varying cargo types, demonstrate the effectiveness of TSTDE. Comparative analyses against established optimisation algorithms, such as Particle Swarm Optimisation (PSO), Differential Evolution (DE), Simulated Annealing (SA), and Ant Colony Optimisation (ACO), reveal the superiority of TSTDE in handling the 3D-BPP [
8].
4.5.13. Particle Swarm Optimisation (PSO)
Particle Swarm Optimisation (PSO) is a nature-inspired optimisation algorithm that leverages the collaborative behaviour of particles in a swarm to explore and converge towards optimal solutions in a given solution space. In the study presented by Li et al. [
39], it is specifically applied to address the challenges of the 3D-BPP in the context of an IoT-based automated e-fulfilment packaging system. The novel 3D adaptive PSO-based packing algorithm, introduced by Li and co-authors [
39], exhibits adaptability by dynamically adjusting its behaviour based on the distinctive characteristics of the packing scenario. The primary evaluative metrics include Center-of-Gravity (COG) distances and computation times, with the algorithm employing two searching strategies to enhance efficiency across diverse scenarios.
The experimental setup integrates a mobile application, a server, a delivery robot, and a robot manipulator, highlighting the confluence of IoT and robotics in the e-fulfilment process, while the results exhibit promise, the authors acknowledge the limitations of the laboratory environment and advocate for further research. Specifically, they propose testing the system in a real smart factory to assess scalability and robustness.
4.5.14. Biogeography Algorithm
The Biogeography algorithm, inspired by ecological processes, simulates the migration of species between habitats and the sharing of information among populations. In the context of CLP, the algorithm is adapted to represent the arrangement of items within containers as solutions. The migration species corresponds to the movement or rearrangement of items, and the habitats symbolise potential solutions [
40].
The algorithm incorporates a fitness function to evaluate the quality of solutions based on factors such as space utilisation, load distribution, and adherence to constraints. Through iterations, the algorithm refines the solutions by mimicking the natural processes of migration and information exchange, gradually converging towards an optimal or near-optimal arrangement of items within the containers [
40].
4.5.15. Pattern-Based Algorithm
The Pattern-Based Algorithm for the Online Bin Packing Problem, proposed by Lin et al. [
41], encompasses three fundamental sub-algorithms: pattern generation, pattern update, and packing. The algorithm maintains a record of the sizes of incoming items within predefined sections, representing equally sized intervals. Patterns, two-dimensional tables of fixed combinations of differently sized items, are generated based on historical data. The pattern plan, continually updated, guides the packing process, with bin waiting queues facilitating the orderly application of patterns. Best-Fit serves as a fallback option when a pattern is not applicable. The algorithm demonstrates advantages in bin usage, particularly in scenarios where items have medium sizes. Comparative experiments with the Best-Fit algorithm reveal superior performance in certain distributions. The proposed algorithm exhibits lower CPU time consumption compared to Best-Fit under various experimental settings. This suggests its potential for real-world applications where computational efficiency is crucial.
4.6. Deep Reinforcement Learning
Several studies have ventured into the application of Deep Reinforcement Learning (DRL) in the context of the 3D-BPP, aiming to efficiently pack objects with varying shapes and orientations into a confined space. These studies propose unique contributions and insights into the world of DRL and its applicability within this domain. While most studies do not explicitly mention Industry 4.0, they indirectly align with its principles, showcasing how advanced technologies, including Machine Learning (ML) and robotics, can enhance logistics processes.
A study published by Yang et al. [
42] employs DRL to optmise the bin-packing process. The approach involves the creation of an intelligent agent that learns to make optimal decisions when packing items into a three-dimensional container. A distinctive feature of the authors methodology is the integration of heuristics derived from human experiences and physical rules with DRL, resulting in an improved packing policy. In a similar vein, Zhao et al., 2021 [
36] also delve into 3D bin packing using DRL. However, their particular focus lies on the online variant of this problem. Building upon this foundation, Zhao et al., 2022 [
43] further extend the application of DRL to address the 3D-BPP, emphasising the online version. Their approach introduces novel elements such as a stacking tree structure, a decoupled packing policy learning framework, and the incorporation of a reward function.
In a recent study conducted by Chien and Wong [
44], DRL was introduced to address the 3D-BPP, with an emphasis on efficiently packing objects with diverse shapes. Their approach entails the amalgamation of DRL with the Soft Actor–Critic (SAC) algorithm and the utilisation of a task simulator to facilitate efficient training. Moreover, they incorporate dynamic adjustments to task difficulty and devise a reward function, both of which contribute to enhancing the learning process. Notably, the trained model exhibits a 70% success rate for moderately challenging tasks. In a parallel endeavour, Xiong et al. [
45] opt for the Advantage Actor–Critic (A2C) algorithm to address the 3D-BPP within a robotic environment. Their approach emphasises maximising space utilisation while respecting constraints.
Furthermore, in the research conducted by Wu and Yao [
34], DRL is used to address the 3D-BPP within the context of port logistics. In their study, the authors model the problem as a Markov Decision Process (MDP) and also employ the A2C algorithm, albeit supplemented with Generalised Advantage Estimation (GAE). Their research is centred on the efficient use of space while adhering to specific constraints associated with port logistics.
The methodologies presented by Jia et al. and Liu et al. [
35,
46] align with the fundamental tenets of Industry 4.0, emphasising the advancement of algorithms and automation to enhance the efficiency of manufacturing and logistics operations. By applying DRL to the Online 3D-BPP, Jia et al. [
35] aim to leverage an improved Actor–Critic algorithm and combine DRL with the Monte Carlo Tree Search (MCTS) algorithm. In addition, they introduce a packing configuration tree model to address the challenge of action space discretisation.
Similarly, Liu et al. [
46] tackle the 3D-BPP within the context of e-commerce warehousing. Their approach is based on the deployment of a Deep Q-Network (DQN) algorithm within the domain of DRL, optimising various aspects, and encompassing the selection of box types, the sequence of loading, and the orientation of the boxes.
In two recent studies [
11,
47], researchers direct their focus towards tackling the 3D Container Loading Problem (3D-CLP) with DRL. Whereas Murdivien and Um [
47] propose the application of DRL to a specific instance of the 3D-BPP using the Proximal Policy Optimisation (PPO) algorithm, and conduct experiments involving hyper-parameter adjustments, Que et al. [
11] introduce a groundbreaking approach, marked by a novel container state representation and a revised sequence of sub-actions within the DRL framework. Their DRL-based approach demonstrates superior performance in utilisation rate.
4.6.1. Implications for Industry 4.0
The integration of DRL in addressing complex combinatorial optimisation challenges such as the 3D-BPP and CLP holds potential implications for Industry 4.0. These studies implicitly encompass some key principles of Industry 4.0, which include the integration of digital technologies, automation, and data-driven decision making into manufacturing and logistics processes.
DRL techniques are instrumental in optimising various aspects of these problems, including efficient resource utilisation, decision making, and process automation. Furthermore, these studies underscore the pivotal role played by Artificial Intelligence (AI) and robotics in enhancing the landscape of logistical operations, reflecting the broader trend within Industry 4.0, and accentuating the transformative potential held by advanced technologies in reshaping the future of manufacturing and logistics.
4.6.2. Soft Actor–Critic Algorithm (SAC)
Two studies [
35,
44] use the Soft Actor–Critic (SAC) algorithm to address the 3D Bin Packing Problem (3D-BPP). Both contributions integrate SAC within the framework of deep reinforcement learning. The study by Zheng et al. [
33] proposes employing SAC to tackle the Online 3D-BPP, particularly focusing on autonomous packing of diverse and novel objects in smart warehouse systems. The authors extend traditional offline packing methods to the online scenario. The SAC algorithm is instrumental in training a policy network capable of handling irregular-shaped objects with varying orientations. The methodology includes the generation of a diverse object dataset, simulation in PyBullet with RGB-D cameras, and a reward system incentivising successful placements while penalising failures and collisions.
Conversely, Jia et al. [
35] focus on the Online 3D-BPP using a combination of deep reinforcement learning and Monte Carlo tree search, while SAC is employed to enhance the learning process, specific implementation details are not explicitly discussed. The authors introduce an improved Actor–Critic algorithm within the deep reinforcement learning framework, emphasising efficient and robust packing strategies.
4.6.3. Deep Q-Network (DQN)
The Deep Q-Network is proposed by Liu et al. [
46] to address the 3D-BPP for irregular items in e-commerce warehousing. The authors present a DQN algorithm framework for intelligent optimisation, emphasising the initialisation of replay memory, the architecture of linear networks, and the Q-learning process. The algorithm represents the system state as a dynamic sequence during episodes, iteratively selecting actions with a stochastic element. Actions, rewards, and transitions are stored in the replay memory, with rewards reflecting the objective to maximise packing space utilisation. Training involves gradient descent on the mean squared error between predicted and target Q-values. Periodic updates to the target Q-network ensure stability.
4.7. Technological Solutions
Advances in technology have allowed a significant enhancement of the different packing techniques. This section will focus on these aspects.
4.7.1. Robotics- and IoT-Based Solutions
In the realm of logistics and manufacturing, the integration of advanced technologies is essential to meet the challenges of modern industry. This section explores how various studies have leveraged robotics, machine learning, and advanced algorithms to address complex problems like the 3D Bin Packing Problem (3D-BPP), the Pallet Loading Problem (PLP), and the Container Loading Problem (CLP). These innovative solutions align with the principles of Industry 4.0, emphasising automation, efficiency, and data-driven decision making.
A study presented by Agarwal et al. [
48] proposes the use of robotics to tackle the 3D-BPP, PLP, and CLP. The authors’ approach integrates a robotic arm and introduces the “Jampack” algorithm for efficient 3D bin packing. Furthermore, the Fault Recovery Module (FRM) ensures reliability by detecting and correcting packing errors, minimising the need for manual intervention. This automated solution embodies the core principles of Industry 4.0, emphasising technology-driven efficiency.
In another study [
35], robotics plays a central role in solving the 3D-BPP, CLP, and PLP. The authors method combines a vision system for object recognition, machine learning algorithms for optimal packing configuration, and autonomous robotic packing. This approach aligns with the Smart Factory concept, a cornerstone of Industry 4.0, by leveraging intelligent devices and data-driven decision making.
The application of robotics and intelligent algorithms in IoT-based e-fulfilment systems echoes the core tenets of Industry 4.0, emphasising automation, connectivity, and data-driven decision making. These solutions illustrate the principles of cyber-physical systems, making them suitable for contemporary manufacturing environments [
39].
Numerous other studies explore the application of robotics to solve the CLP and its variants. For instance, Nguyen and Nguyen [
49] propose a heuristic-based solution for the Online 3D-BPP, highlighting the simplicity of the solution. Shuai et al. [
21] address the real-world challenges of handling non-standard and deformable boxes, demonstrating a robotic system capable of accommodating such complexities. Xiong et al. [
45] combine Deep Reinforcement Learning (DRL) with advanced hardware technology, employing robotic arms equipped with suction-based end-effectors and vision feedback modules.
In the study presented by Yang et al., 2023 [
42], items are automatically picked from a conveyor belt and placed in containers, showcasing the effectiveness of DRL-based packing algorithms. Finally, Yang et al., 2021 [
37] develop a sophisticated robotic system that combines DRL with a suction-based picking module and mounts the robot on an Automated Guided Vehicle (AGV), streamlining the transportation of items to target containers.
In the dynamic landscape of Industry 4.0, the application of robotics, machine learning, and advanced algorithms has emerged as a transformative force in addressing intricate packing and loading challenges. These studies exemplify the synergy between technology and efficiency, underscoring the potential of Industry 4.0 to revolutionise logistics and manufacturing.
4.7.2. Unity Game Engine and Augmented Reality (AR)
The Unity game engine is used by Murdivien and Um [
47] as a pivotal platform for simulating and training a Deep Reinforcement Learning (DRL) model to automate the loading process in a simulated environment. The authors highlight Unity’s advantages in terms of visualisation, user-friendly interface, and flexibility. Noteworthy is Unity’s capability to handle various shapes, providing flexibility in modelling packing configurations beyond cuboid boxes. The user-friendly interface enables seamless parameter adjustments, while the visualisation capabilities contribute to a clear and intuitive representation of the packing process.
A comprehensive framework, proposed by Jaoua et al. [
24], integrates the Unity game engine and augmented reality (AR) to enhance 3D-BPP solutions. The optimisation module, employing heuristics in Python, generates solutions considering stability, weight, volume, and item nature. The AR module, implemented using Unity, creates a virtual environment mimicking real-world packing scenarios. The framework visualises packing solutions in an immersive AR environment, aiding operators in decision making. The connecting module facilitates the seamless transfer of coordinates from the optimisation module to the AR module, resulting in a mobile application for real-world use. The authors position their work within the context of Industry 4.0, emphasising the transition to the fourth revolution of logistics.
4.7.3. FPGA-Based Enhancement of 3D Bin Packing Solutions
Borra et al. [
50] advocate for the adoption of a Field-Programmable Gate Array (FPGA) as a hardware accelerator, emphasising its parallel processing capabilities in tackling the intricacies of the 3D-BPP. The implementation of FPGAs in the context of the 3D-BPP offers notable contributions to the field. The parallelisation of operations on the Layered Dense Container (LDC) and the utilisation of a Deep Q-Network (DQN) for enhanced decision making represent significant strides. Despite the promising outcomes, the authors acknowledge certain limitations inherent in their FPGA-based approach. Challenges in FPGA implementation, including the need for extensive customisation using Hardware Description Languages (HDLs) and potential accuracy degradation during DQN parameter quantisation, are noted. The paper highlights the trade-offs between ease of use and customisation, contrasting the benefits of utilising different tools. Additionally, the reported speedup of approximately 15 times on average prompts a nuanced evaluation of the achieved performance boost in practical applications.
4.7.4. Depth Camera and Vision System
The study presented by Ladplee et al. [
51] proposes an automated system for volumetric measurement of rectangular parcel boxes using a single LiDAR depth camera. It addresses the need for efficient and accurate dimensioning of boxes in the logistics industry, particularly in warehouse management. The system utilises a range of image processing techniques, including the flood fill algorithm, to detect the top plane of boxes, extract their dimensions, and measure their height, while the study does not directly delve into solving the 3D-BPP, the Pallet Loading Problem, or the CLP, it does briefly mention the integration of the box dimensions into a 3D bin packing application. Since the system proposes the integration of automated dimensioning with a 3D bin packing application, it supports principles of automation, data-driven decision making, efficiency, real-time tracking, and sustainability, all of which are central to Industry 4.0’s goals for smart manufacturing and logistics.
The authors of another study [
35] employ a Realsense depth camera as part of their experimental setup to capture data in the real-world environment. This vision system is crucial for perception in the context of the Online 3D-BPP problem. Specifically, it is used to simulate the online packing and palletising scene. The target object, represented by a cuboid wooden block, is captured by the depth camera shooting vertically downward during the process. The authors present fitting results of three target objects segmented by Euclidean clustering, with the geometric centre points identified. The actual dimensions of the target objects are compared to the final average fitting results after 300 tests. The reported error of the final fitting results is within 1%, indicating a high level of accuracy.
4.7.5. Parallel Processing with CUDA (Compute Unified Device Architecture)
A study presented by Bozejko et al. [
26] leverages the parallel processing capabilities offered by CUDA, a parallel platform developed by NVIDIA. In the specific context of the 3D-BPP, the paper employs parallel processing to expedite the packing algorithm’s execution, especially when dealing with large and complex instances of the problem. Parallelisation is achieved by distributing the computational workload across multiple threads or processing units available on the GPU.
Parallel processing significantly enhances the performance of the packing algorithm. The inherent parallel nature of the 3D-BPP, where different containers or regions within a container can be processed concurrently, aligns well with the capabilities of GPUs. This leads to a substantial reduction in the time required to find an optimal or near-optimal packing solution. CUDA technology enables the algorithm to scale efficiently with the size and complexity of the problem instances. As the number of items to be packed or the diversity of box types increases, parallel processing allows for a more scalable and expedited solution without compromising the quality of the packing [
26].
5. Discussion
The advent of Industry 4.0 has brought about a paradigm shift in the manufacturing sector, with an increased emphasis on automation, data exchange, and smart systems. This study explores the role of various algorithmic approaches and technological solutions in addressing packing problems within this context.
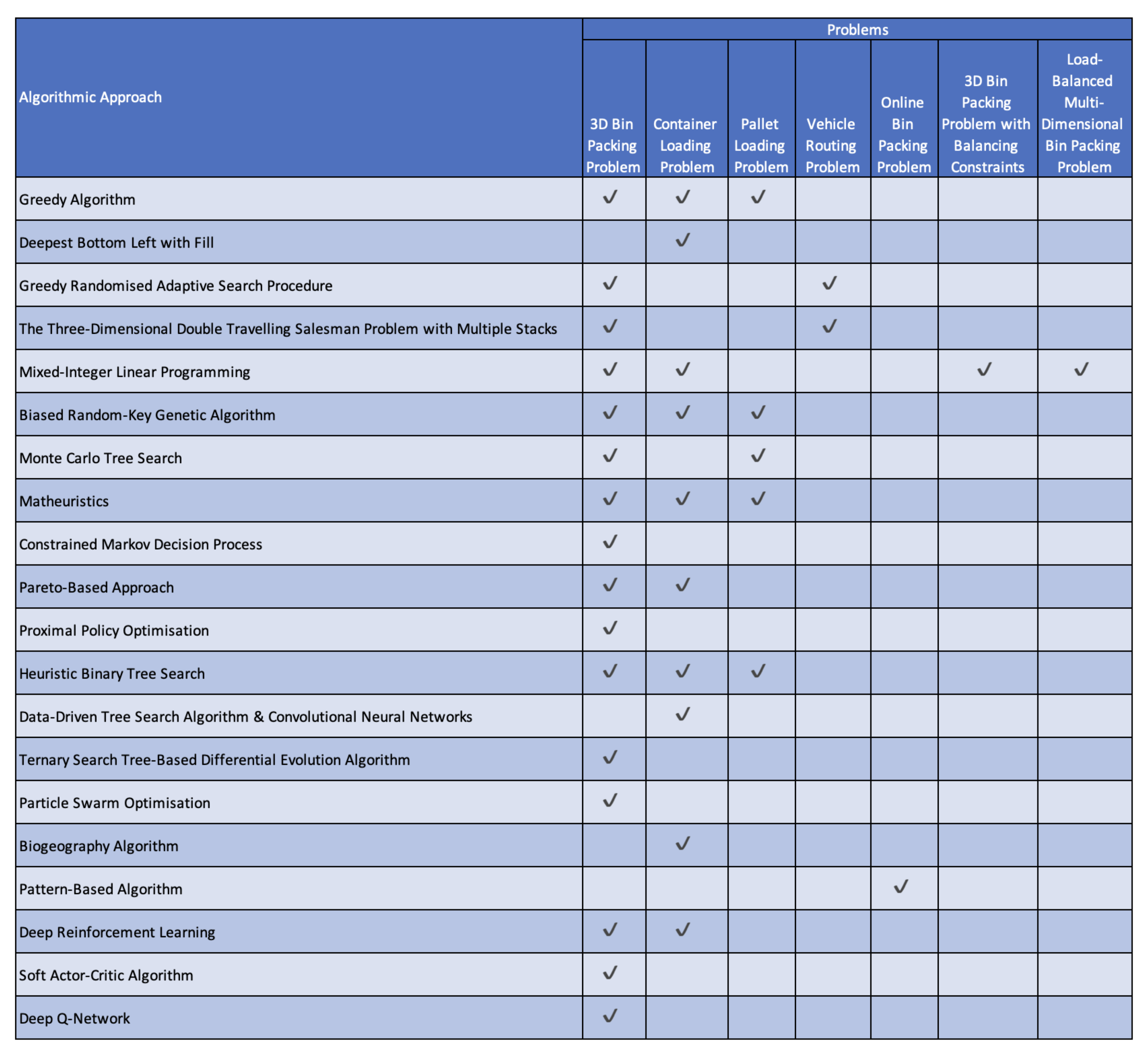
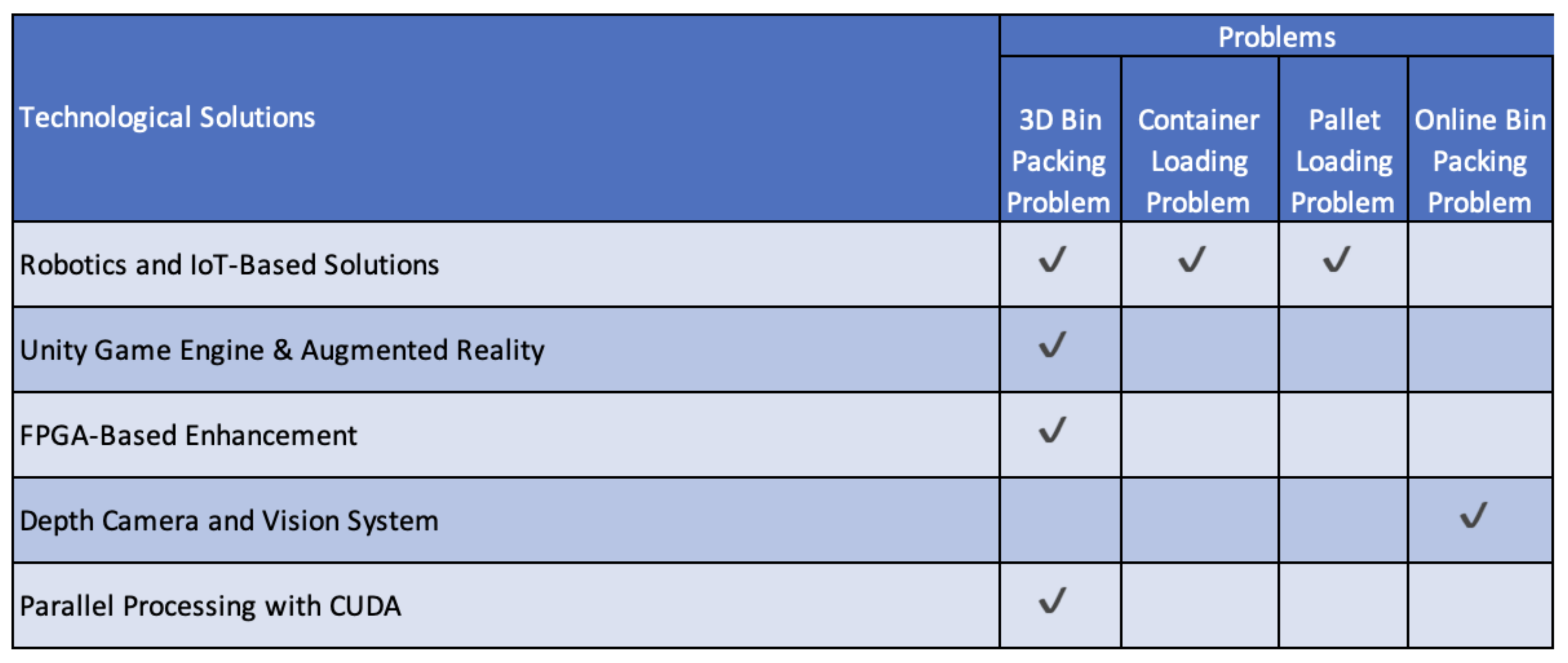
Our findings, summarised in
Figure 2 and
Figure 3, underscore the potential of these approaches and solutions in enhancing packing efficiency and effectiveness in Industry 4.0. Each algorithm and technology addresses specific packing problems, highlighting the need for a tailored approach based on the unique requirements of each problem.
The diversity and complexity of packing problems necessitate a diverse range of solutions. Our research suggests that there is no one-size-fits-all solution. Instead, the choice of algorithm or technology should be guided by the specific problem at hand and the requirements of the Industry 4.0 environment. Each algorithm has its strengths and weaknesses, and the choice of algorithm should be guided by the specific requirements of the problem at hand. For instance, while most reviewed algorithms are effective for the 3D Bin Packing Problem, more complex problems such as the 3D Bin Packing Problem with Balancing Constraints may require more sophisticated approaches like Mixed-Integer Linear Programming.
Furthermore, our study points to the potential benefits of integrating algorithmic approaches with technological solutions. This integrated approach could lead to more robust and efficient packing solutions, contributing to the overall productivity and competitiveness of manufacturing operations in Industry 4.0.
In conclusion, our research provides valuable insights into the application of packing solutions in Industry 4.0. It underscores the importance of continued research and development in this field as the demand for efficient and effective packing solutions continues to grow in line with the advancements in Industry 4.0.
6. Automated Extraction of Relevant Concepts and Mutual Relationships
The above discussion has highlighted the importance of product packing with respect to Industry 4.0. All this analysis has been carried out manually. In this section, an automated approach to information extraction from textual sources is discussed. The aim is to support the above discussion and assess some properties that can provide further details on the main concepts and mutual relationships between them, related to the overall topic of this investigation. Despite the potential likelihood of the identification of unrelated or erroneous concepts or mutual relationships, automated textual analysis performed by natural language processing techniques can leverage such issues with the use of large quantity of (textual) data.
Depending of the overall context and the available semantic information, a diverse range of text-mining techniques can be employed. The choice of techniques generally hinges on the type of data and its inherent structure. The method introduced in this section is based on the work of Trovati et al. [
52], in which specific probabilistic and topological properties are identified, assessed and evaluated to automatically produce fragments of Bayesian Networks. Bayesian networks are graphical modelling structures which focus on cause and effect modelling, capturing both the probabilistic relationships between variables and their historical information. Despite not directly identifying Bayesian Networks, a similar extraction approach is used.
More specifically:
Over 5000 abstracts were identified using the following keywords:
volumetrics, smart packing, industry 4.0 and their lexical and semantic variations as outlined in
Table 1;
The abstracts were downloaded and pre-processed to remove unnecessary data including (but not limited to) metadata, web-links, authors’ details, and any other word or character which would not have any use in this context.
Subsequently, a set of keywords associated with
influence as per Trovati et al. [
52] was used to identify those sentences containing such keywords and the following steps were followed:
All the sentences were first tokenised and parsed via SpaCy (
https://spacy.io/, (accessed on 6 December 2023)) to identify the overall syntactic structure;
A grammar-based extraction identified triples of the form (NP1, keyword, NP2), where NP1 and NP2 are the noun phrases, and keyword consists of one or more keywords as mentioned above.
The triples play a role in populating the nodes and edges of the associated network. This is achieved by identifying relationships among the predefined keywords and the corresponding elements in the datasets. To avoid redundancy, all extracted terms underwent
normalisation—a process that maps various variants of a term to a unique and standardised form. A detailed discussion of this approaches can be found in [
52].
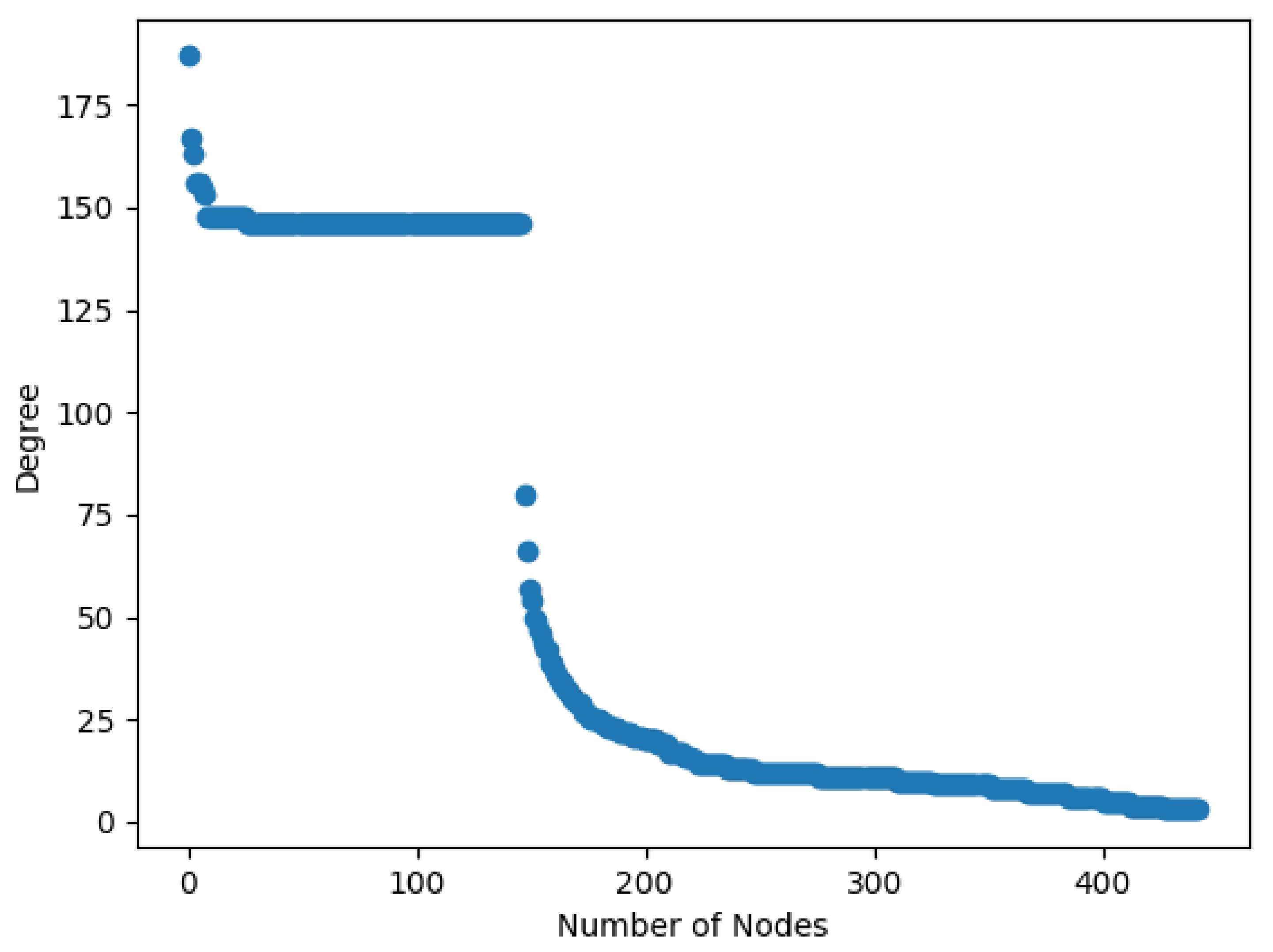
The aim of this approach is to assess the topology associated with the query defined by the above keywords, which would enable an understanding as to whether the identified relations, concepts, and methods are related as per the above section. However, this can only support the previous findings as opposed to categorically demonstrate them due to the intrinsic statistical and methodological issues related to this type of analysis [
52].
Figure 4 depicts the degree distribution of the network extracted.
Based on the above, the following concept pairs were identified, including the
relation strength as per [
52], which is associated with a numerical value in the interval
.
Table 2 shows the most representative concepts identified via the above approach, which are linked by a mutual relationship. This identifies a strong relationship (measured by the relation strength) between those concepts, which broadly supports the above discussion. As mentioned above, the terms in
Table 2 are semantically equivalent to those described in
Table 1.
Table 2 is not an exhaustive list and only captures a snapshot of the concepts linked by the strongest relations. All these are components of the network defined above. Note that
product packing appears strongly connected with
security, which is not usually highlighted in several applications and/or methods.
7. Conclusions
Product packing is a crucial aspect of Industry 4.0, due to its implications to cost efficiency, processing and delivery time, sustainability, and overall industry processes. This survey article highlights the state-of-the-art research, frameworks, applications, and deployments of product packing. Despite the maturity of some of the topics that fall under the overall umbrella, the advances in product packing are still very much confined within different research fields. This poses significant challenges from an implementation and deployment perspective, as the current algorithms tend to lack a wider applicability. As a consequence, product packing should be investigated in a more holistic manner in order to achieve a seamless integration of hardware, software, and algorithmic efficiency to ensure a far-reaching impact.










{kind=link}
{kind=link}
{kind=link}
{kind=link}