


An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments


 ,
,  , and
, and
Abstract
:1. Introduction
1.1. Previous Studies
1.2. Contributions
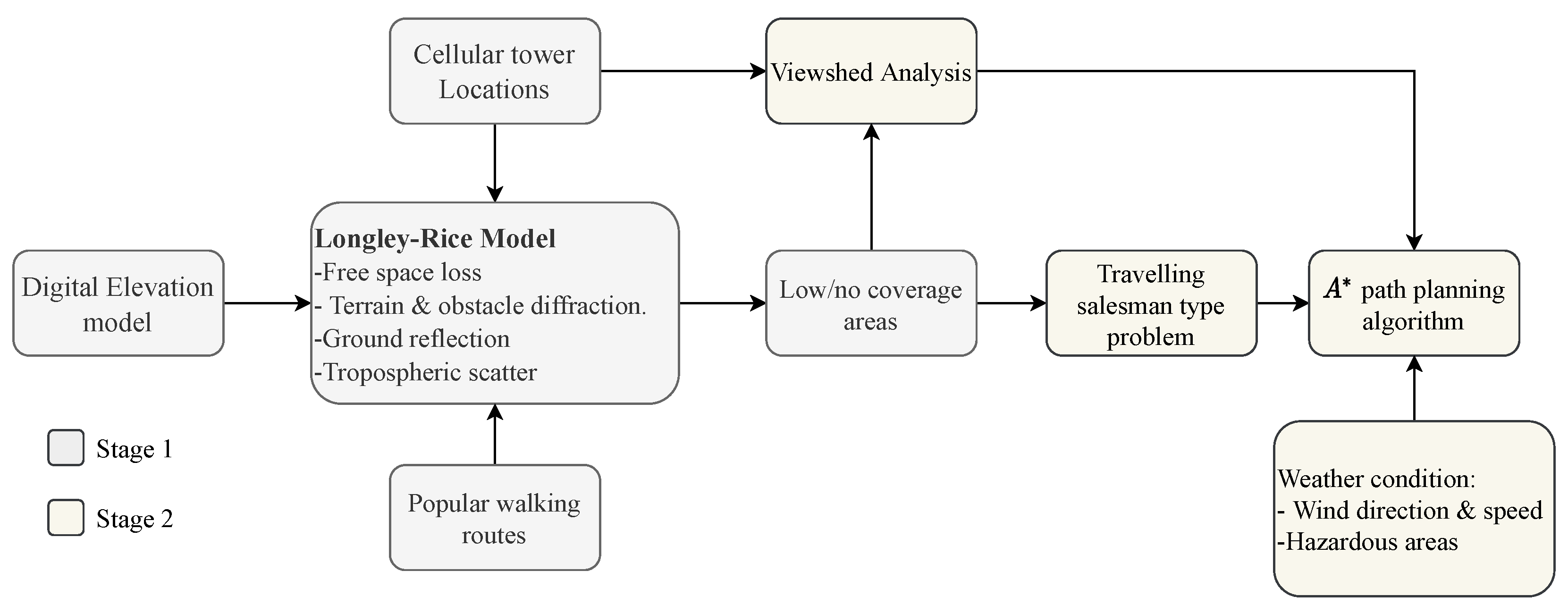
- A two-stage framework is proposed to allow coverage to areas with poor signal propagation by relaying signals from the available cell-towers.
- A viewshed analysis was conducted to determine the mutual visibility region between points of interest and cell-towers.
- A blockage map was created to prevent the UAV from passing through no coverage areas.
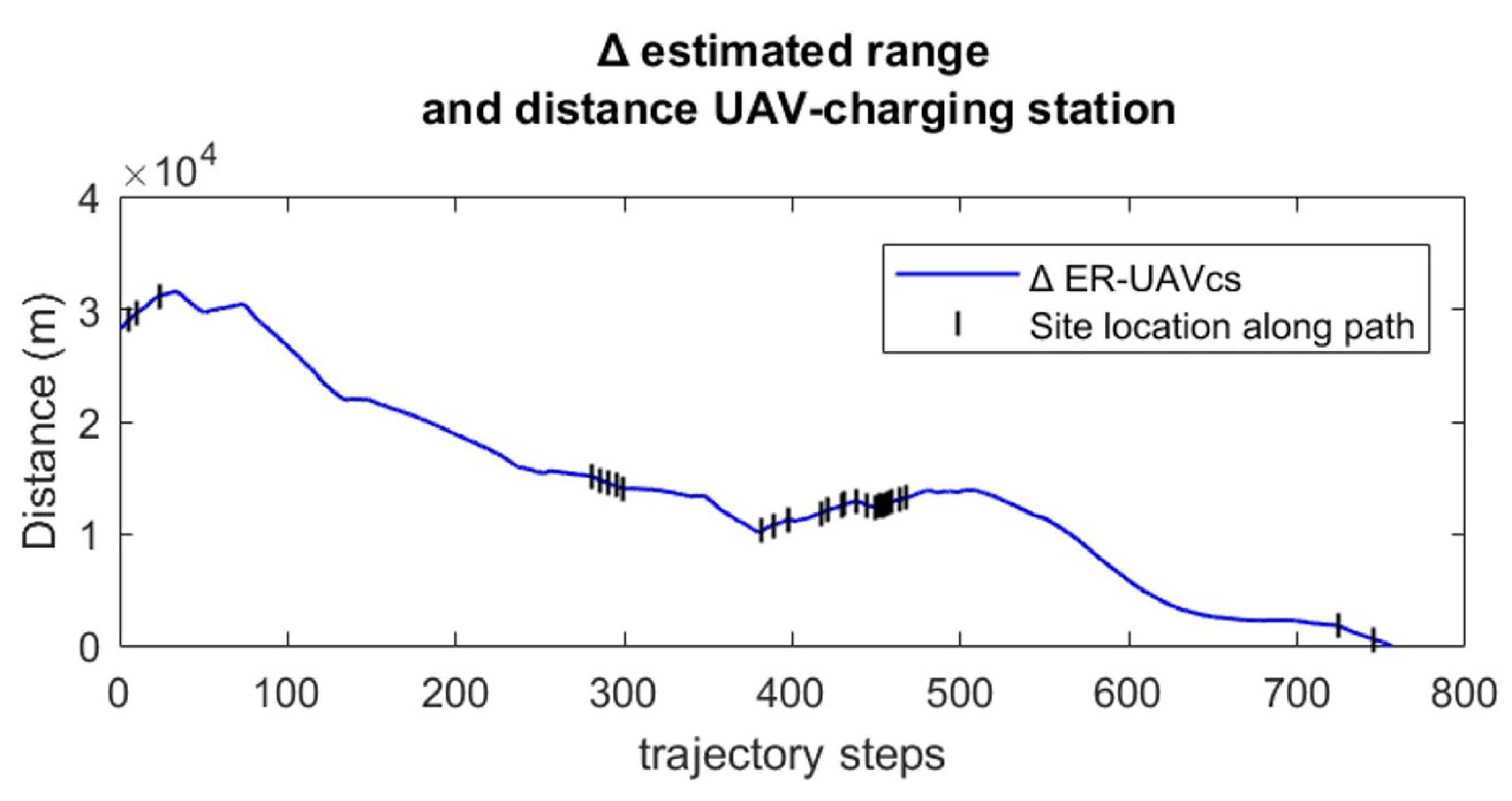
- The approach enables the UAV to determine the optimal time to head back towards the charging station.
2. Materials and Methods
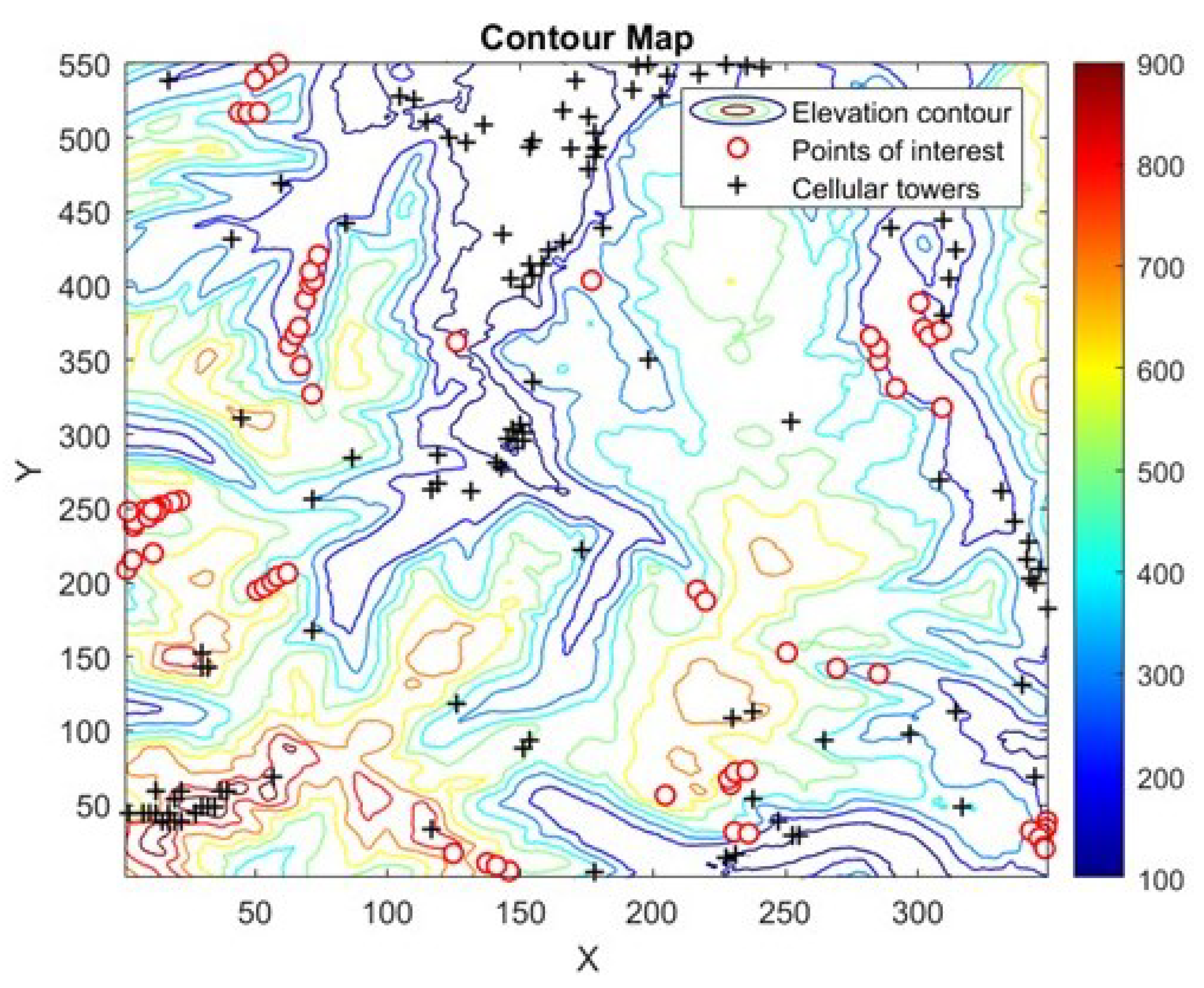
2.1. Datasets: Terrain, Cell-Tower Locations, and Popular Walking Routes
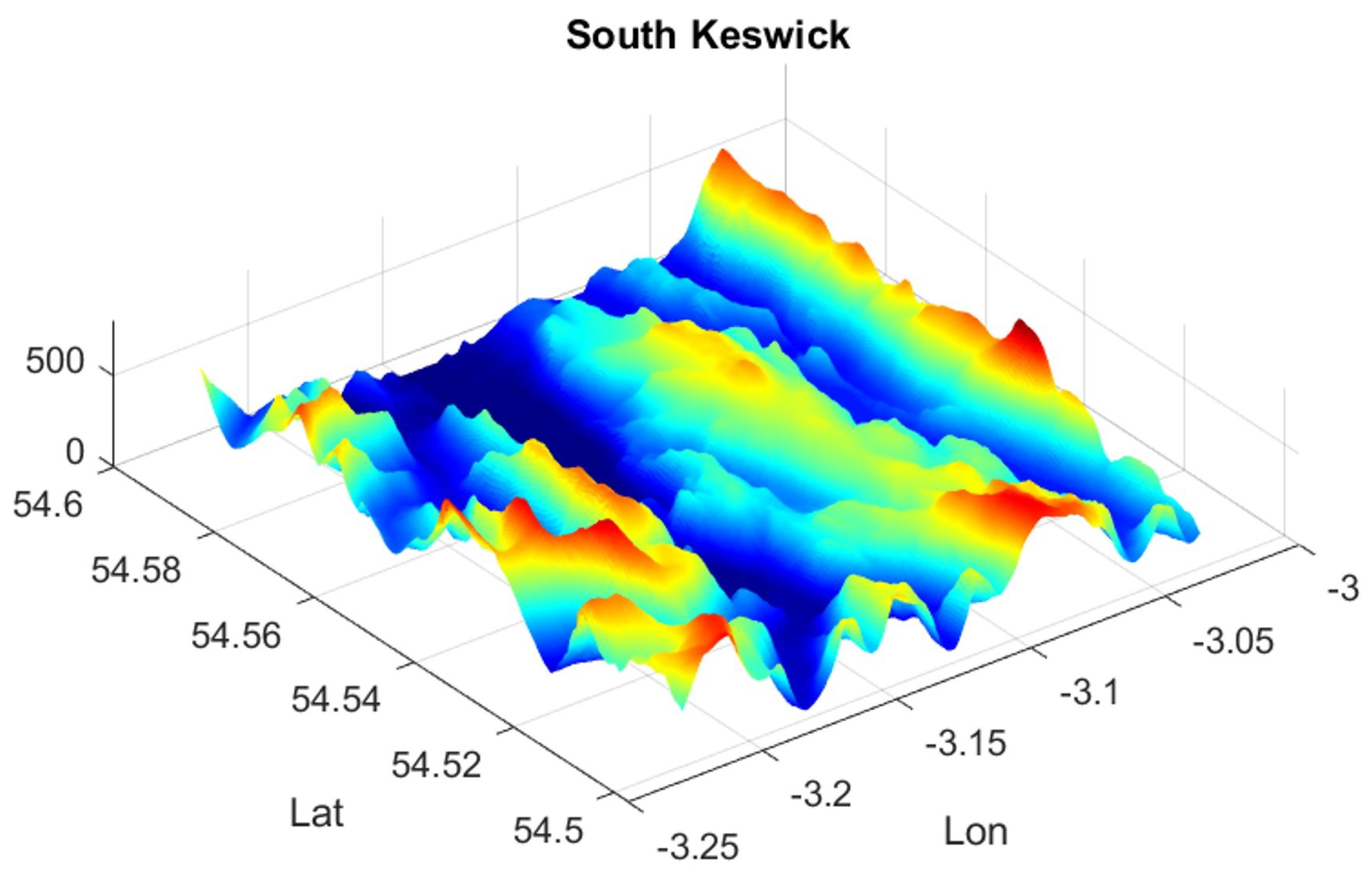
- Digital terrain elevation data, which involve a standard mapping format that contains a matrix of vertical elevation values spaced at regular horizontal intervals measured in geographic latitude and longitude units.
- Band-interleaved-by-line, which is a binary raster format with an accompanying header file which describes the layout and formatting of the file.
- Georeferenced tagged image file format, which is a TIFF file with embedded geographic information.
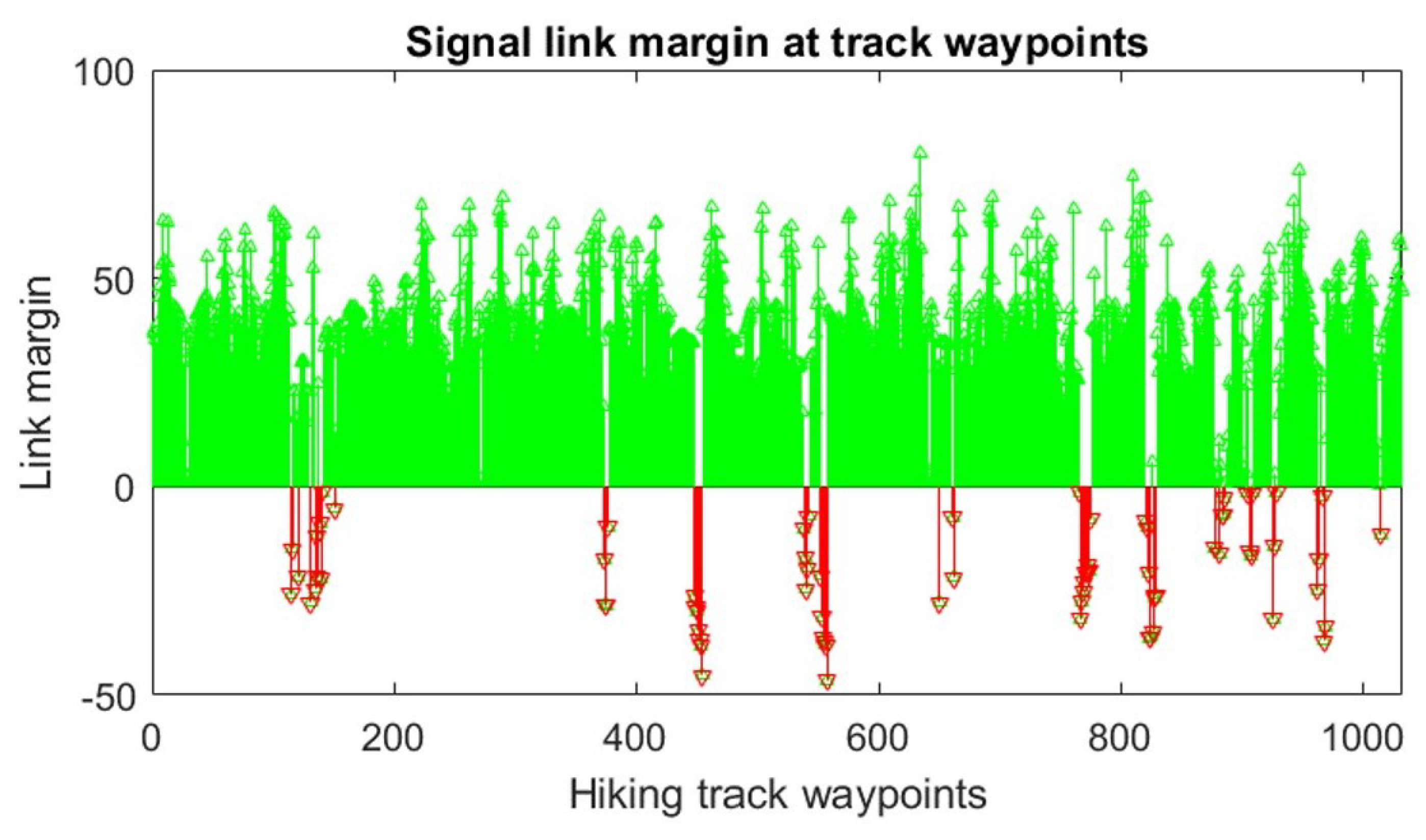
2.2. Coverage Analysis
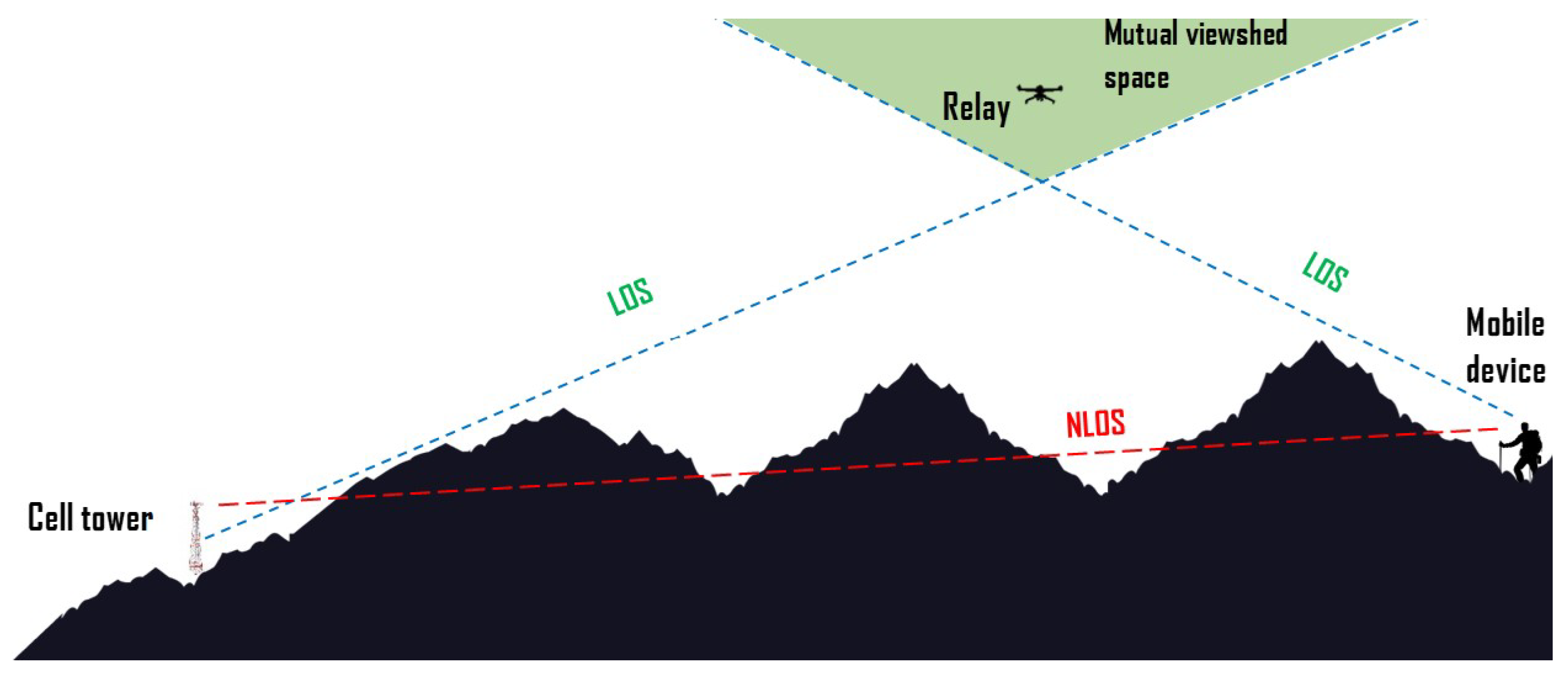
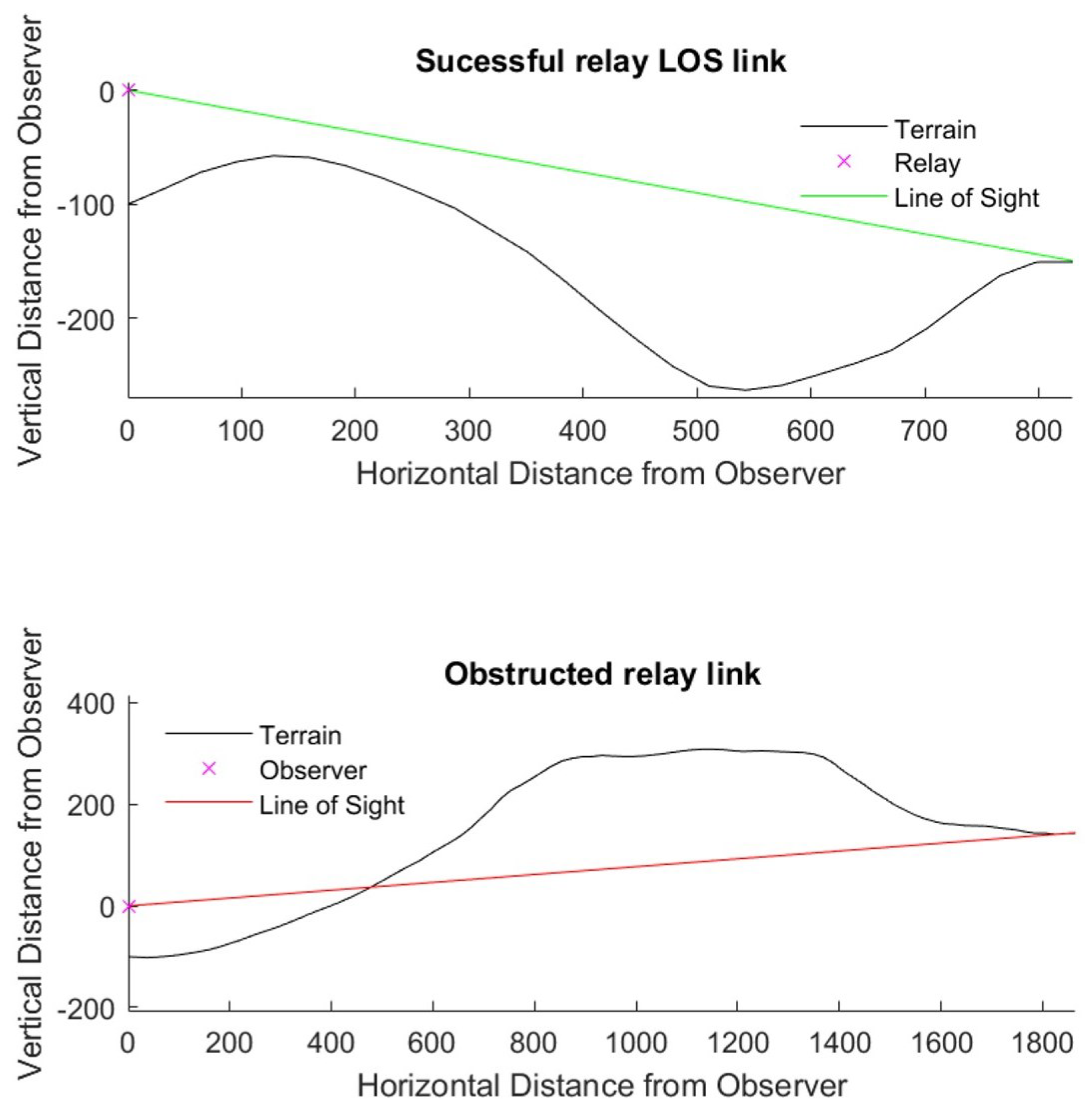
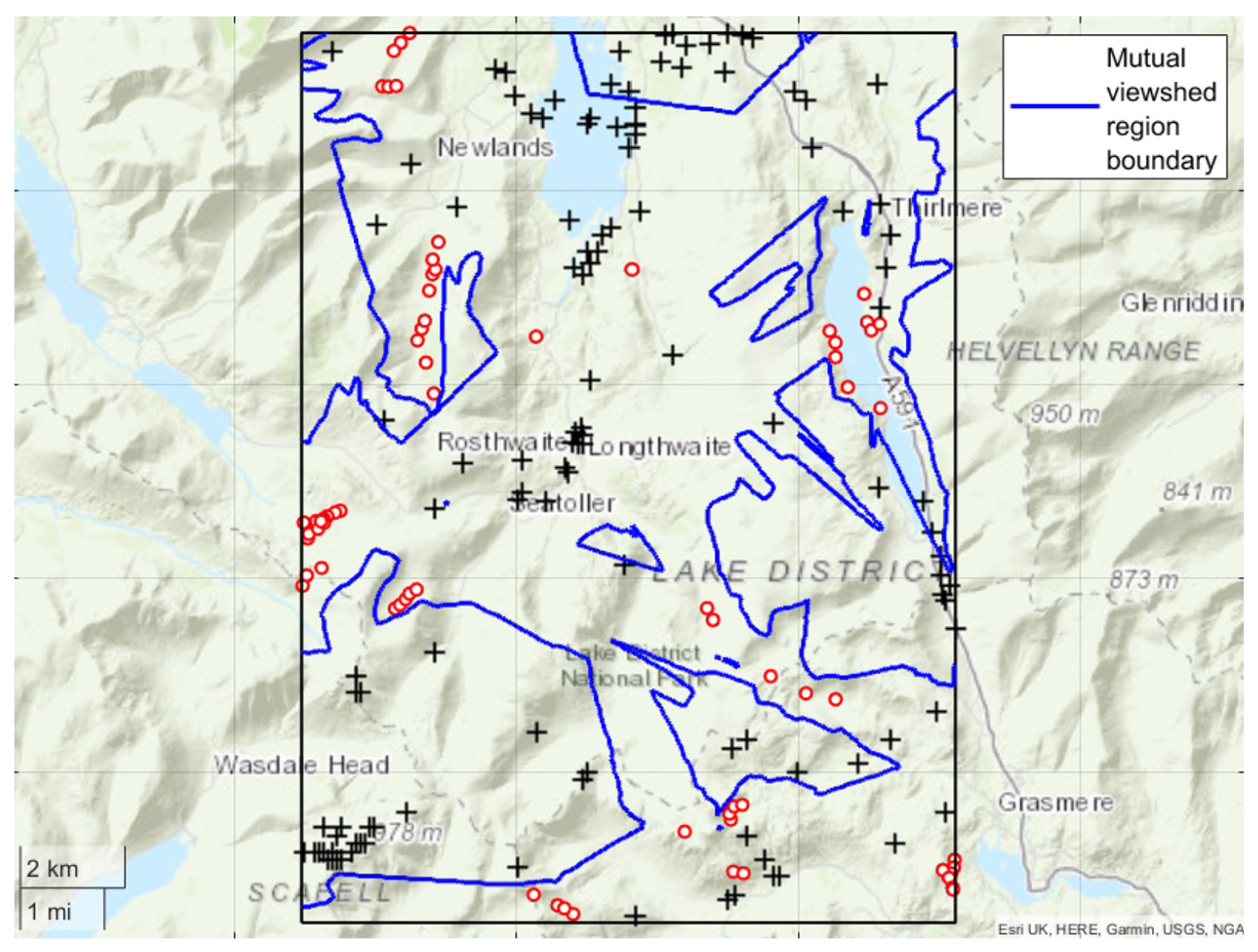
2.3. Viewshed Analysis
- There is no line of sight between the transmitter and receiver;
- Only the transmitter has line of sight;
- Only the receiver has line of sight.
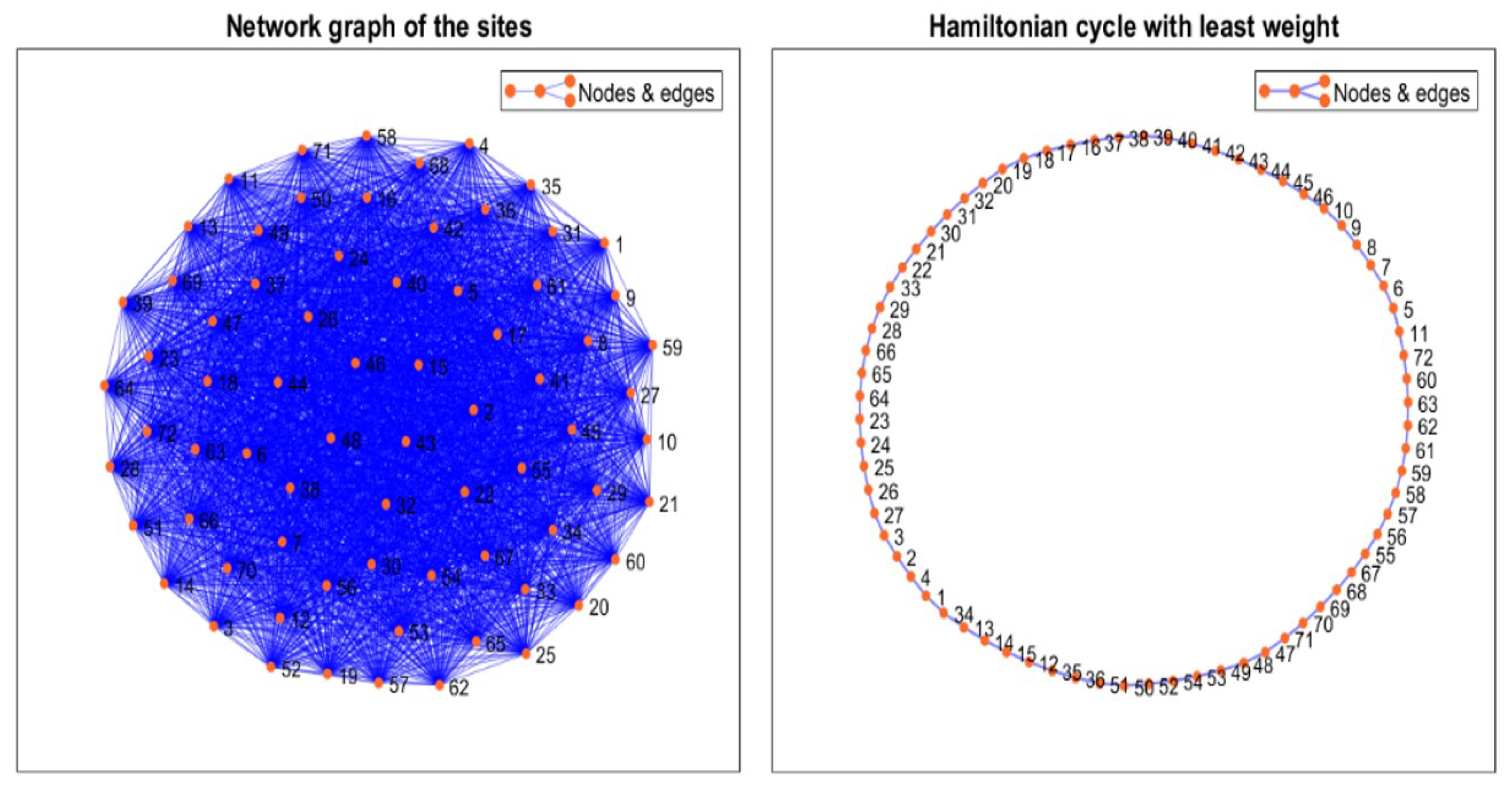
2.4. Traveling Salesman Problem
2.5. The A∗ Search Algorithm
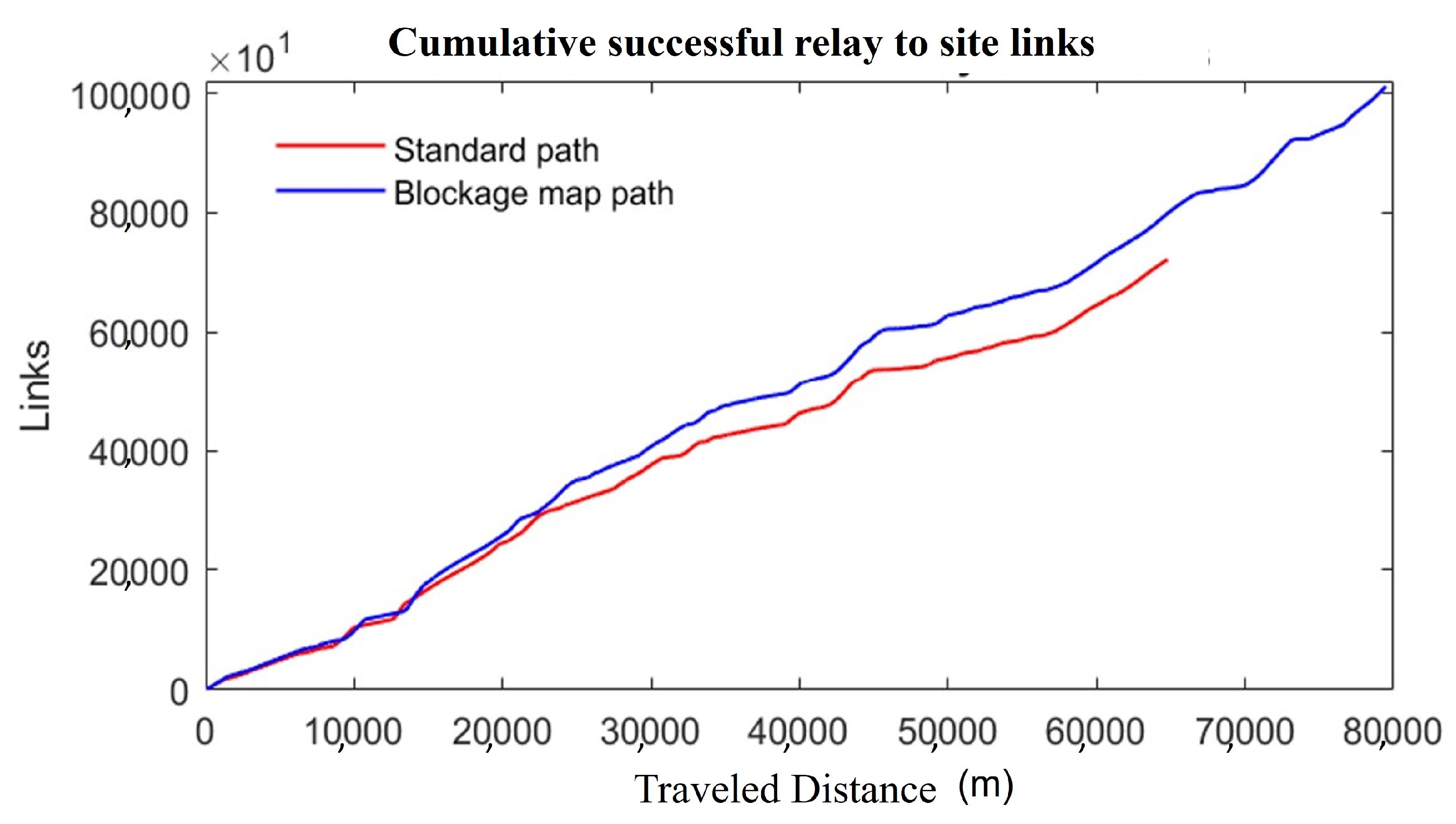
2.6. Performance Metric
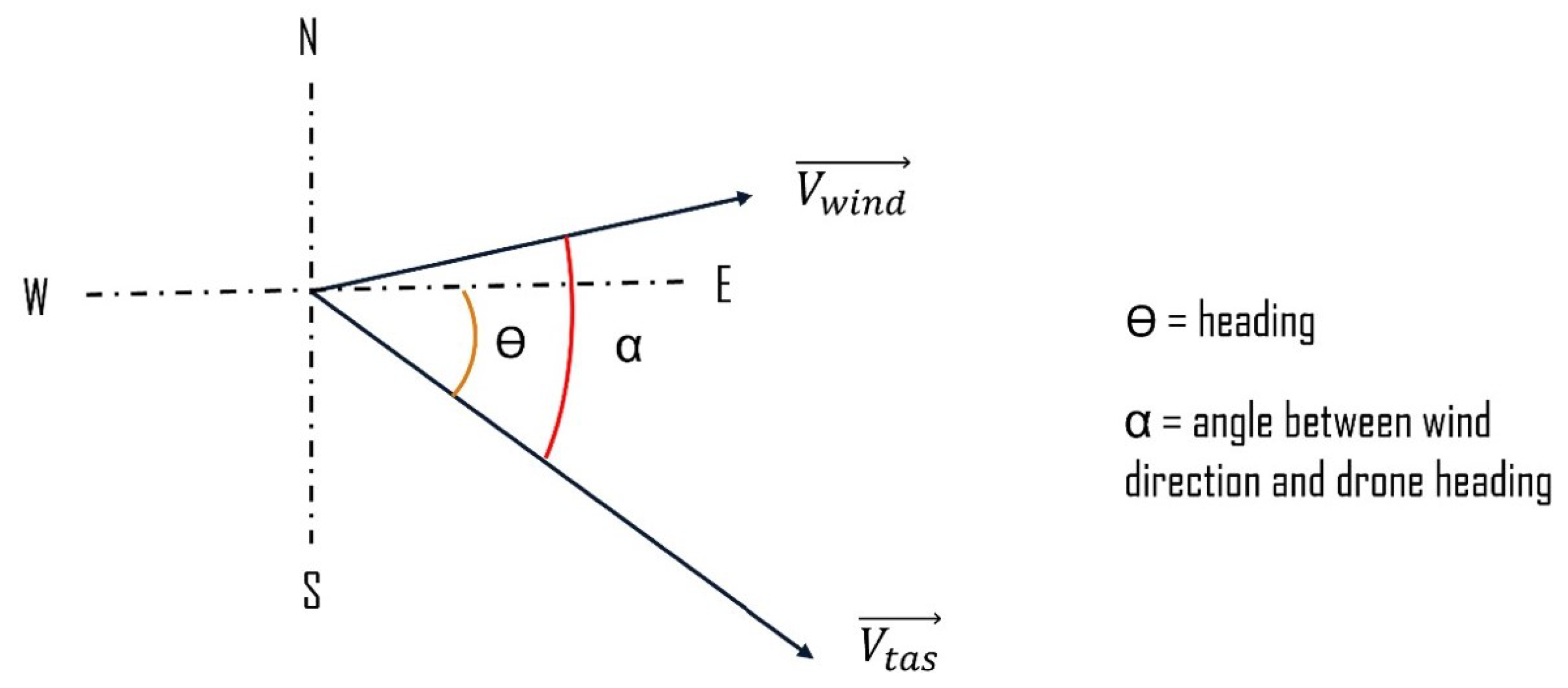
2.7. Energy Awareness and Wind Resilience
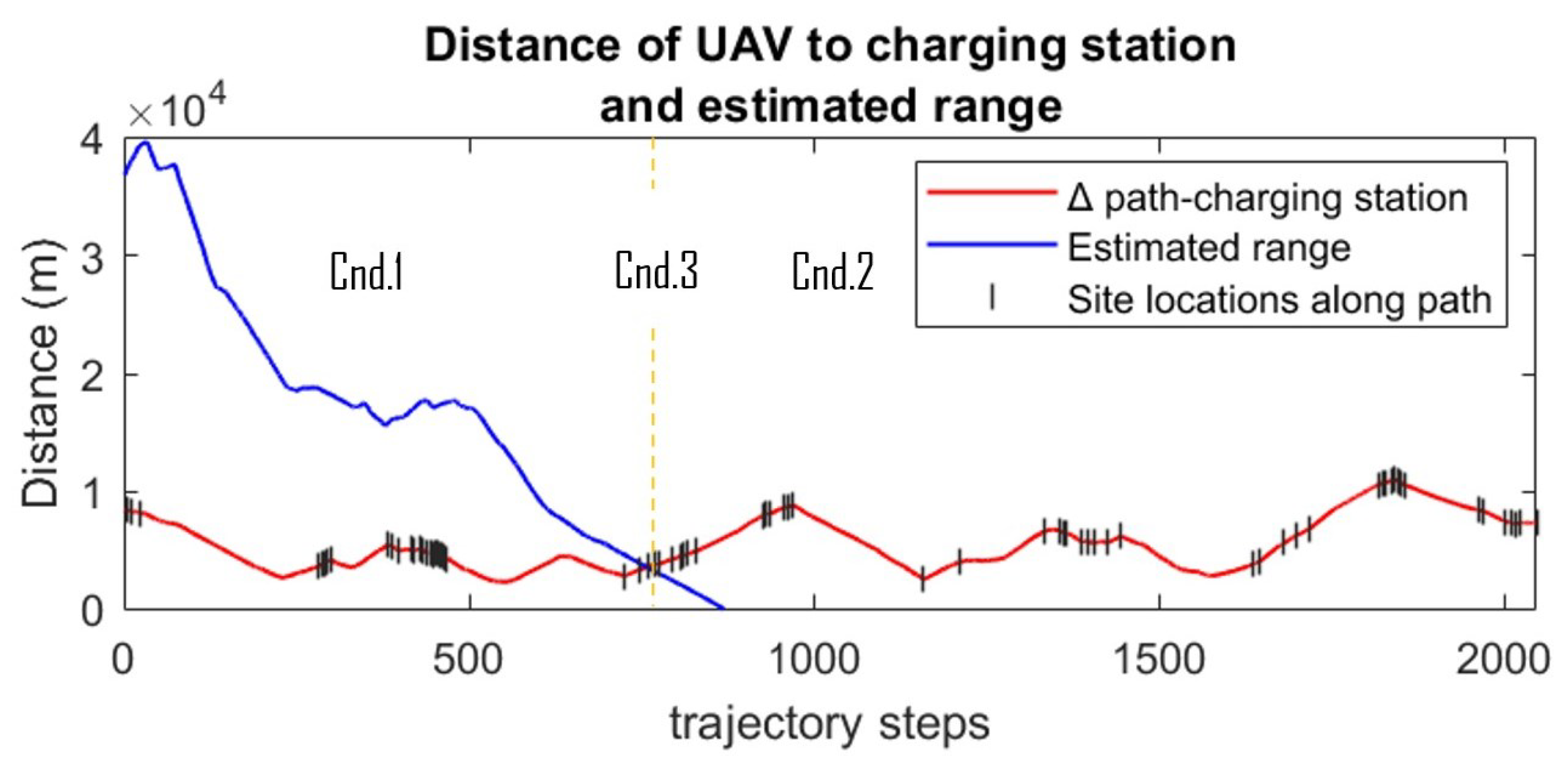
- If , it implies that the UAV has enough charge to reach the charge station.
- If , it implies that the UAV cannot reach the charge station.
- If , it implies that the UAV has the exact charge needed to reach the charge station.
3. Results and Discussion
3.1. Points of Interest
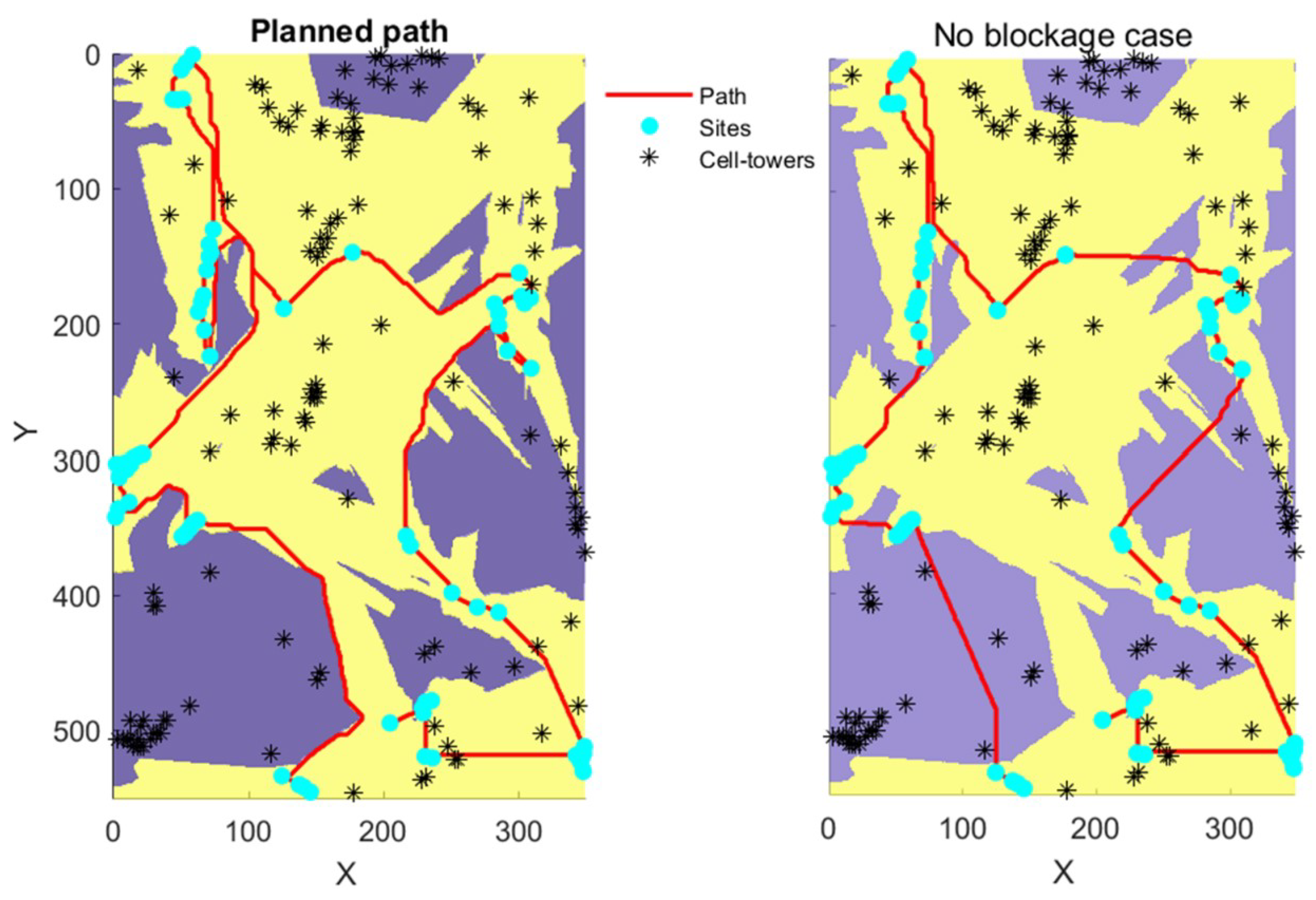
3.2. Path Planning
3.2.1. Viewshed Map
3.2.2. Optimal Sequence
3.2.3. A∗ Search
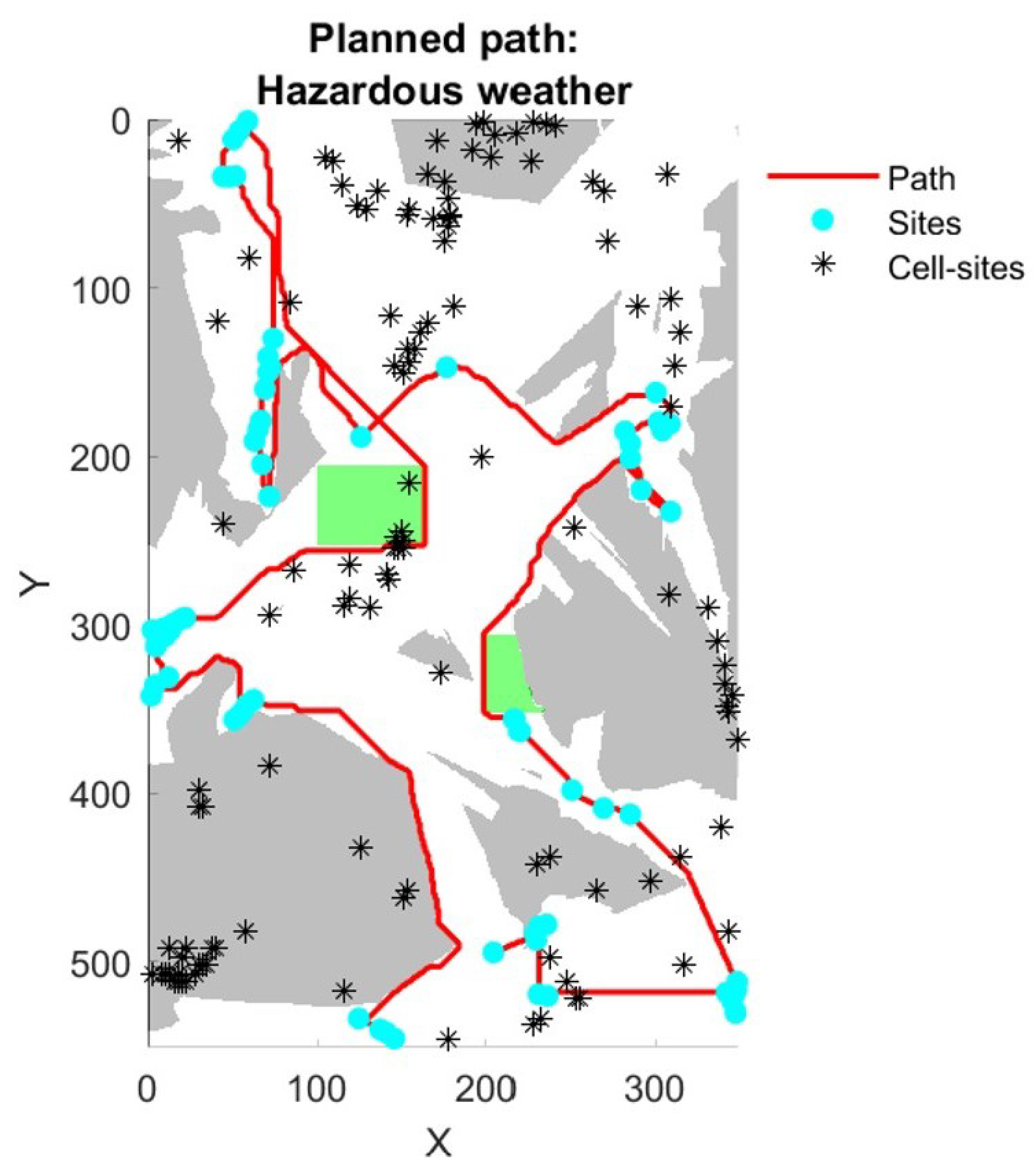
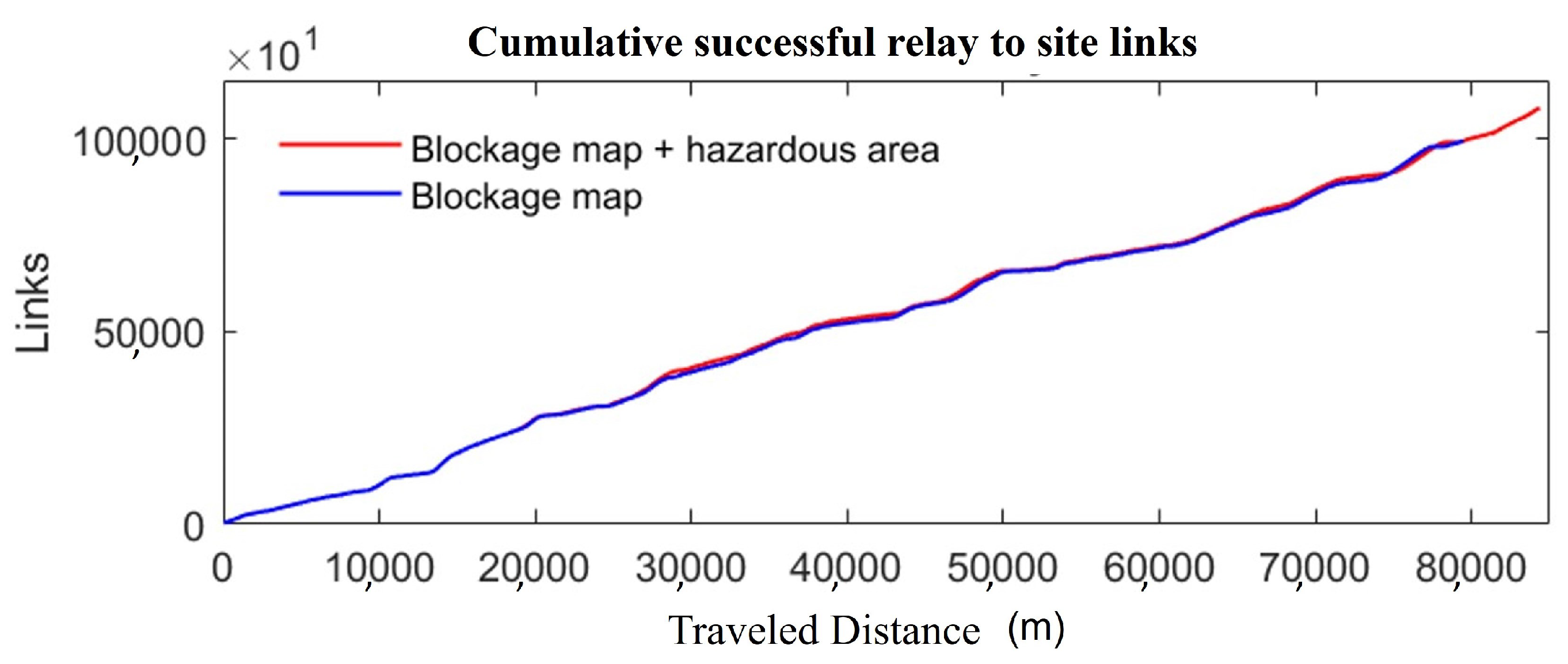
3.2.4. Hazardous Weather
3.3. Energy Awareness and Wind Resilience
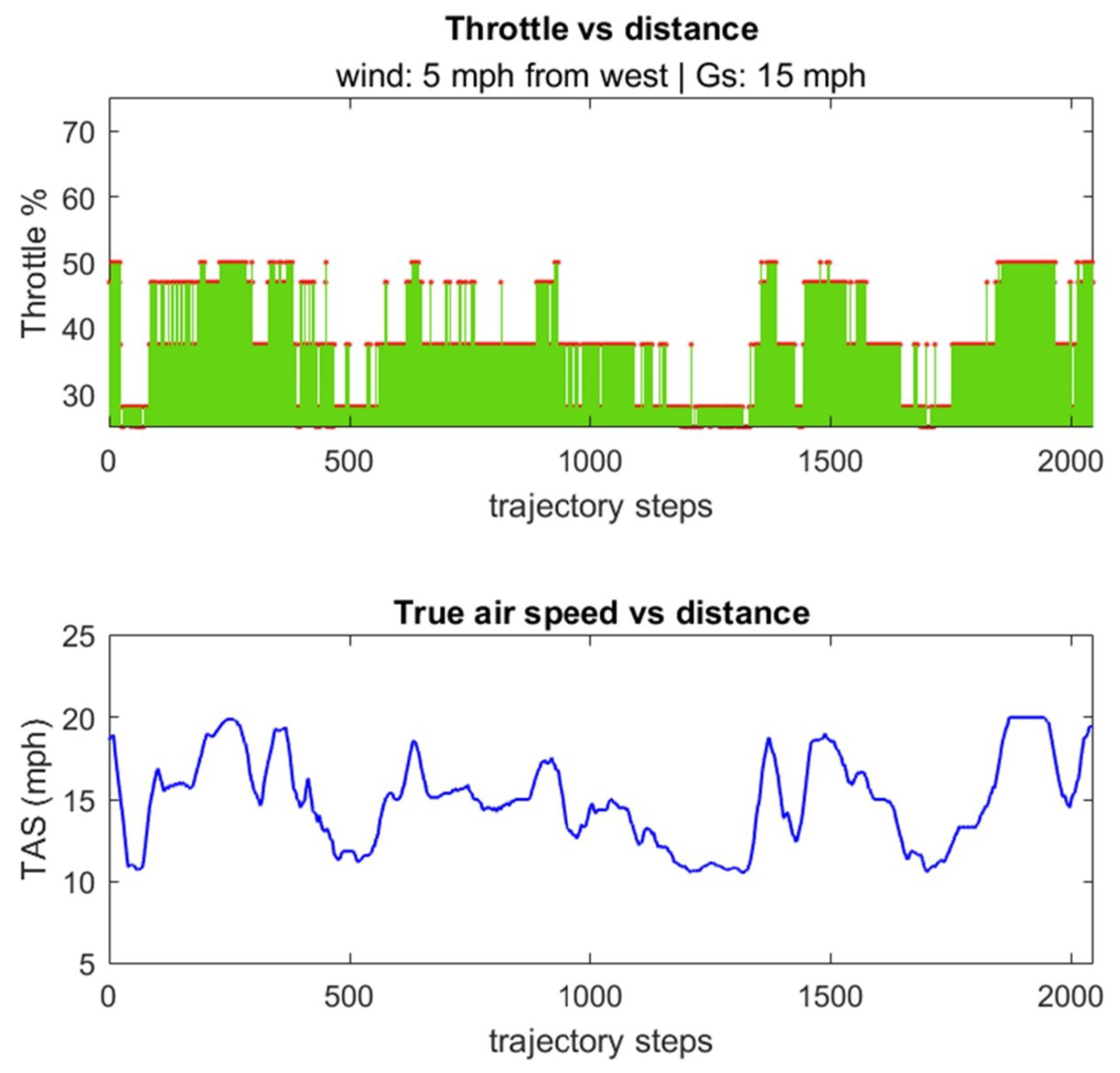
3.3.1. Throttle Modulation Simulation
3.3.2. Energy Awareness Simulation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DEM/DTM | Digital elevation/terrain model |
| GPS | Global positioning system |
| GS | Ground speed |
| LOS | Line-of-sight |
| MR | Mountain rescue |
| NLOS | Non-line-of-sight |
| RX | Receiver |
| SRTM | Shuttle Radar Topography Mission |
| TAS | True air speed |
| TSP | Traveling salesman problem |
| TX | Transmitter |
| UAV | Unmanned aerial vehicle |
References
- Conrad, C.; Al-Rubaye, S.; Tsourdos, A. Intelligent Embedded Systems Platform for Vehicular Cyber-Physical Systems. Electronics 2023, 12, 2908. [Google Scholar] [CrossRef]
- Guo, W.; Wei, Z.; Gonzalez, O.; Perrusquía, A.; Tsourdos, A. Control Layer Security: A New Security Paradigm for Cooperative Autonomous Systems. In IEEE Vehicular Technology Magazine; IEEE: New York City, NY, USA, 2023. [Google Scholar]
- Tazzioli, M. Towards a history of mountain runaways “migrants” and the genealogies of mountain rescue and struggles. J. Alp. Res. 2020. [Google Scholar] [CrossRef]
- Fraser, B.; Perrusquía, A.; Panagiotakopoulos, D.; Guo, W. Hybrid deep neural networks for drone high level intent classification using non-cooperative radar data. In Proceedings of the 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Tenerife, Canary, 19–20 July 2023; IEEE: New York City, NY, USA, 2023; pp. 1–6. [Google Scholar]
- San Juan, V.; Santos, M.; Andújar, J.M. Intelligent UAV map generation and discrete path planning for search and rescue operations. Complexity 2018, 2018, 6879419. [Google Scholar] [CrossRef]
- Maxama, X.B.; Markus, E.D. A survey on propagation challenges in wireless communication networks over irregular terrains. In Proceedings of the 2018 Open Innovations Conference (OI), Thohoyandou, South Africa, 3–5 October 2018; IEEE: New York City, NY, USA, 2018; pp. 79–86. [Google Scholar]
- Li, H.; He, X.; He, W. Review of wireless personal communications radio propagation models in high altitude mountainous areas at 2.6 GHz. Wirel. Pers. Commun. 2018, 101, 735–753. [Google Scholar] [CrossRef]
- Harayama, M.; Nishioka, M.; Hayashi, T. 3-D Simulation of MANET with UAV in Mountainous Areas. In Proceedings of the 2020 35th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Nagoya, Japan, 25–28 June 2023; IEEE: New York City, NY, USA, 2020; pp. 166–171. [Google Scholar]
- Al-Shehri, S.M.; Loskot, P.; Hirsch, M.J. Enabling connectivity for tactical networks in mountainous areas by aerial relays. Telecommun. Syst. 2019, 71, 561–575. [Google Scholar] [CrossRef]
- Zhang, Y.; Arakawa, T.; Krogmeier, J.V.; Anderson, C.R.; Love, D.J.; Buckmaster, D.R. Large-scale cellular coverage analyses for UAV data relay via channel modeling. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; IEEE: New York City, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; IEEE: New York City, NY, USA, 2014; pp. 2376–2381. [Google Scholar]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A survey of path planning algorithms for mobile robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Ermağan, U.; Yıldız, B.; Salman, F.S. A learning based algorithm for drone routing. Comput. Oper. Res. 2022, 137, 105524. [Google Scholar] [CrossRef]
- Jensen-Nau, K.R.; Hermans, T.; Leang, K.K. Near-optimal area-coverage path planning of energy-constrained aerial robots with application in autonomous environmental monitoring. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1453–1468. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, S.; Shi, Q. Improve stability in UAV relay networks by jointly optimizing communication, trajectory and power. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018; IEEE: New York City, NY, USA, 2018; pp. 180–185. [Google Scholar]
- Jiang, X.; Wu, Z.; Yin, Z.; Yang, Z. Power and trajectory optimization for UAV-enabled amplify-and-forward relay networks. IEEE Access 2018, 6, 48688–48696. [Google Scholar] [CrossRef]
- Nasrollahi, S.; Mirrezaei, S.M. Towards Communication UAV-Based: Improving Throughput By Optimum Trajectory and Power Allocation; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Jiangchun, G.; Guoru, D.; Yitao, X.; Haichao, W.; Qihui, W. Proactive optimization of transmission power and 3D trajectory in UAV-assisted relay systems with mobile ground users. Chin. J. Aeronaut. 2021, 34, 129–144. [Google Scholar]
- Padilla, G.E.G.; Kim, K.J.; Park, S.H.; Yu, K.H. Flight path planning of solar-powered UAV for sustainable communication relay. IEEE Robot. Autom. Lett. 2020, 5, 6772–6779. [Google Scholar] [CrossRef]
- Yi, P.; Zhu, L.; Zhu, L.; Xiao, Z.; Han, Z.; Xia, X.G. Joint 3-D positioning and power allocation for UAV relay aided by geographic information. IEEE Trans. Wirel. Commun. 2022, 21, 8148–8162. [Google Scholar] [CrossRef]
- Chen, J.; Mitra, U.; Gesbert, D. 3D urban UAV relay placement: Linear complexity algorithm and analysis. IEEE Trans. Wirel. Commun. 2021, 20, 5243–5257. [Google Scholar] [CrossRef]
- Zhong, X.; Guo, Y.; Li, N.; Chen, Y.; Li, S. Deployment optimization of UAV relay for malfunctioning base station: Model-free approaches. IEEE Trans. Veh. Technol. 2019, 68, 11971–11984. [Google Scholar] [CrossRef]
- Xie, H.; Yang, D.; Xiao, L.; Lyu, J. Connectivity-aware 3D UAV path design with deep reinforcement learning. IEEE Trans. Veh. Technol. 2021, 70, 13022–13034. [Google Scholar] [CrossRef]
- Yang, S.; Shi, D.; Peng, Y.; Qin, W.; Zhang, Y. Joint Communication-Motion Planning for UAV Relaying in Urban Areas. In Proceedings of the 2021 18th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Rome, Italy, 6–9 July 2021; IEEE: New York City, NY, USA, 2021; pp. 1–9. [Google Scholar]
- Mardani, A.; Chiaberge, M.; Giaccone, P. Communication-aware UAV path planning. IEEE Access 2019, 7, 52609–52621. [Google Scholar] [CrossRef]
- Tseng, F.H.; Liang, T.T.; Lee, C.H.; Der Chou, L.; Chao, H.C. A star search algorithm for civil UAV path planning with 3G communication. In Proceedings of the 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kitakyushu, Japan, 27–29 August 2014; IEEE: New York City, NY, USA, 2014; pp. 942–945. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C.; Schneckenburger, N. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef]
- Mazaherifar, A.; Mostafavi, S. UAV placement and trajectory design optimization: A survey. Wirel. Pers. Commun. 2022, 124, 2191–2210. [Google Scholar] [CrossRef]
- Ma, Z.; Gong, H.; Wang, X. An UAV path planning method in complex mountainous area based on a new improved ant colony algorithm. In Proceedings of the 2019 International Conference on Artificial Intelligence and Advanced Manufacturing (AIAM), Dublin, Ireland, 17–19 October 2019; IEEE: New York City, NY, USA, 2019; pp. 125–129. [Google Scholar]
- Wang, S.; Zhang, L.; Luo, L.; Zeng, Y. A path planning method of UAV in mountainous environment. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; IEEE: New York City, NY, USA, 2021; Volume 5, pp. 1399–1404. [Google Scholar]
- Sanchez-Fernandez, A.J.; Romero, L.F.; Bandera, G.; Tabik, S. VPP: Visibility-based path planning heuristic for monitoring large regions of complex terrain using a UAV onboard camera. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 15, 944–955. [Google Scholar] [CrossRef]
- United States Geological Survey. USGS EROS Archive-Digital Elevation-Shuttle Radar Topography Mission (SRTM) 1 Arc-Second Global. Available online: https://www.usgs.gov/centers/eros/science/usgs-eros-archive-digital-elevation-shuttle-radar-topography-mission-srtm-1#overview (accessed on 5 August 2023).
- OpenCellID. Available online: http://opencellid.org (accessed on 10 August 2023).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node A | Node B | Distance (m) | Node A | Node B | Distance (m) | Node A | Node B | Distance (m) |
|---|---|---|---|---|---|---|---|---|
| 1 | 4 | 209 | 21 | 22 | 215 | 47 | 48 | 149 |
| 1 | 34 | 2645 | 21 | 30 | 152 | 47 | 71 | 3828 |
| 2 | 3 | 517 | 22 | 33 | 28 | 48 | 49 | 126 |
| 2 | 4 | 152 | 23 | 24 | 122 | 49 | 53 | 274 |
| 3 | 27 | 6273 | 23 | 64 | 1824 | 50 | 51 | 189 |
| 5 | 6 | 253 | 24 | 25 | 151 | 50 | 52 | 11 |
| 5 | 11 | 6289 | 25 | 26 | 133 | 52 | 54 | 239 |
| 6 | 7 | 209 | 26 | 27 | 157 | 53 | 54 | 41 |
| 7 | 8 | 718 | 28 | 29 | 88 | 55 | 56 | 744 |
| 8 | 9 | 117 | 28 | 66 | 630 | 55 | 67 | 5061 |
| 9 | 10 | 151 | 29 | 33 | 242 | 56 | 57 | 622 |
| 10 | 46 | 3096 | 30 | 31 | 165 | 57 | 58 | 277 |
| 11 | 72 | 2240 | 31 | 32 | 67 | 58 | 59 | 248 |
| 12 | 15 | 359 | 35 | 36 | 209 | 59 | 61 | 739 |
| 12 | 35 | 1010 | 36 | 51 | 3825 | 60 | 63 | 650 |
| 13 | 14 | 164 | 37 | 38 | 628 | 60 | 72 | 4468 |
| 13 | 34 | 934 | 38 | 39 | 455 | 61 | 62 | 177 |
| 14 | 15 | 164 | 39 | 40 | 236 | 62 | 63 | 205 |
| 16 | 17 | 108 | 40 | 41 | 167 | 64 | 65 | 219 |
| 16 | 37 | 2859 | 41 | 42 | 583 | 65 | 66 | 321 |
| 17 | 18 | 166 | 42 | 43 | 318 | 67 | 68 | 255 |
| 18 | 19 | 87 | 43 | 44 | 106 | 68 | 69 | 1545 |
| 19 | 20 | 39 | 44 | 45 | 197 | 69 | 70 | 756 |
| 20 | 32 | 39 | 45 | 46 | 354 | 70 | 71 | 587 |
| Path Type | Distance (m) | UAV Elevation | No. of Links | Links/Distance |
|---|---|---|---|---|
| Classic | 62,539 | 100 | 721,936 | 11.543773 |
| Blockage map | 76,581 | 100 | 1,011,607 | 13.20963 |
| Path Type | Distance (m) | UAV Elevation | No. of Links | Links/Distance |
|---|---|---|---|---|
| Blockage map | 76,581 | 100 | 1,011,607 | 13.20963 |
| Blockage map + hazards | 81,241 | 100 | 1,081,354 | 13.31045 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Debeiki, M.; Al-Rubaye, S.; Perrusquía, A.; Conrad, C.; Flores-Campos, J.A. An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments. Future Internet 2024, 16, 89. https://doi.org/10.3390/fi16030089
El Debeiki M, Al-Rubaye S, Perrusquía A, Conrad C, Flores-Campos JA. An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments. Future Internet. 2024; 16(3):89. https://doi.org/10.3390/fi16030089
Chicago/Turabian StyleEl Debeiki, Mostafa, Saba Al-Rubaye, Adolfo Perrusquía, Christopher Conrad, and Juan Alejandro Flores-Campos. 2024. "An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments" Future Internet 16, no. 3: 89. https://doi.org/10.3390/fi16030089
APA StyleEl Debeiki, M., Al-Rubaye, S., Perrusquía, A., Conrad, C., & Flores-Campos, J. A. (2024). An Advanced Path Planning and UAV Relay System: Enhancing Connectivity in Rural Environments. Future Internet, 16(3), 89. https://doi.org/10.3390/fi16030089