Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components





Abstract
:1. Introduction
- Estimate the resulting SWCs;
- Estimate the SVC of the single components caused by the PWC and triggered SWCs;
- Estimate the SVC on the vehicle installation spaces caused by the components SVCs.
2. Materials and Methods
2.1. Employed Databases and Methods
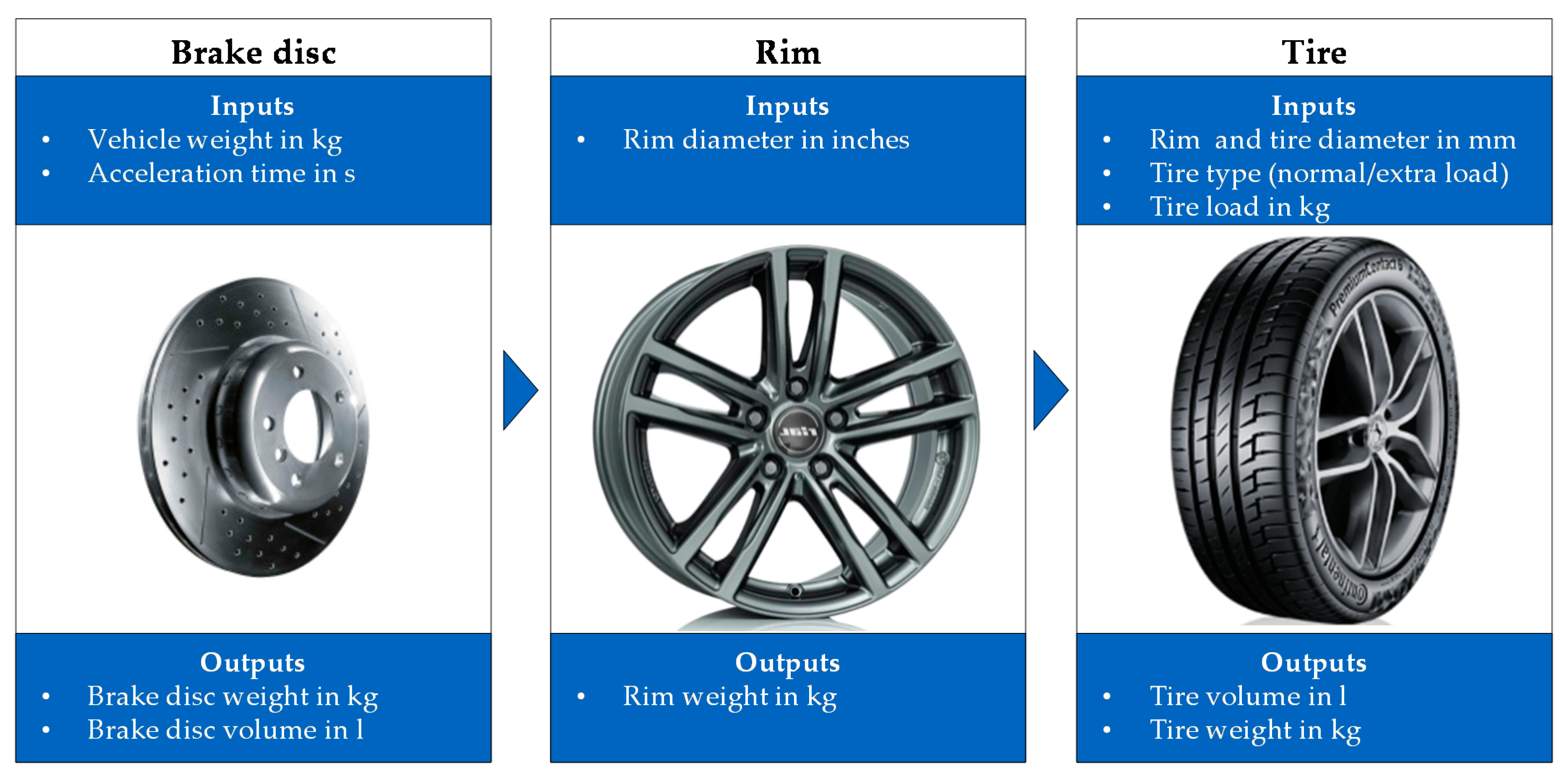
2.2. Brake Model
2.2.1. Volumetric Model
2.2.2. Weight Model
2.3. Rim Model
2.3.1. Minimum Rim Diameter
2.3.2. Weight Model
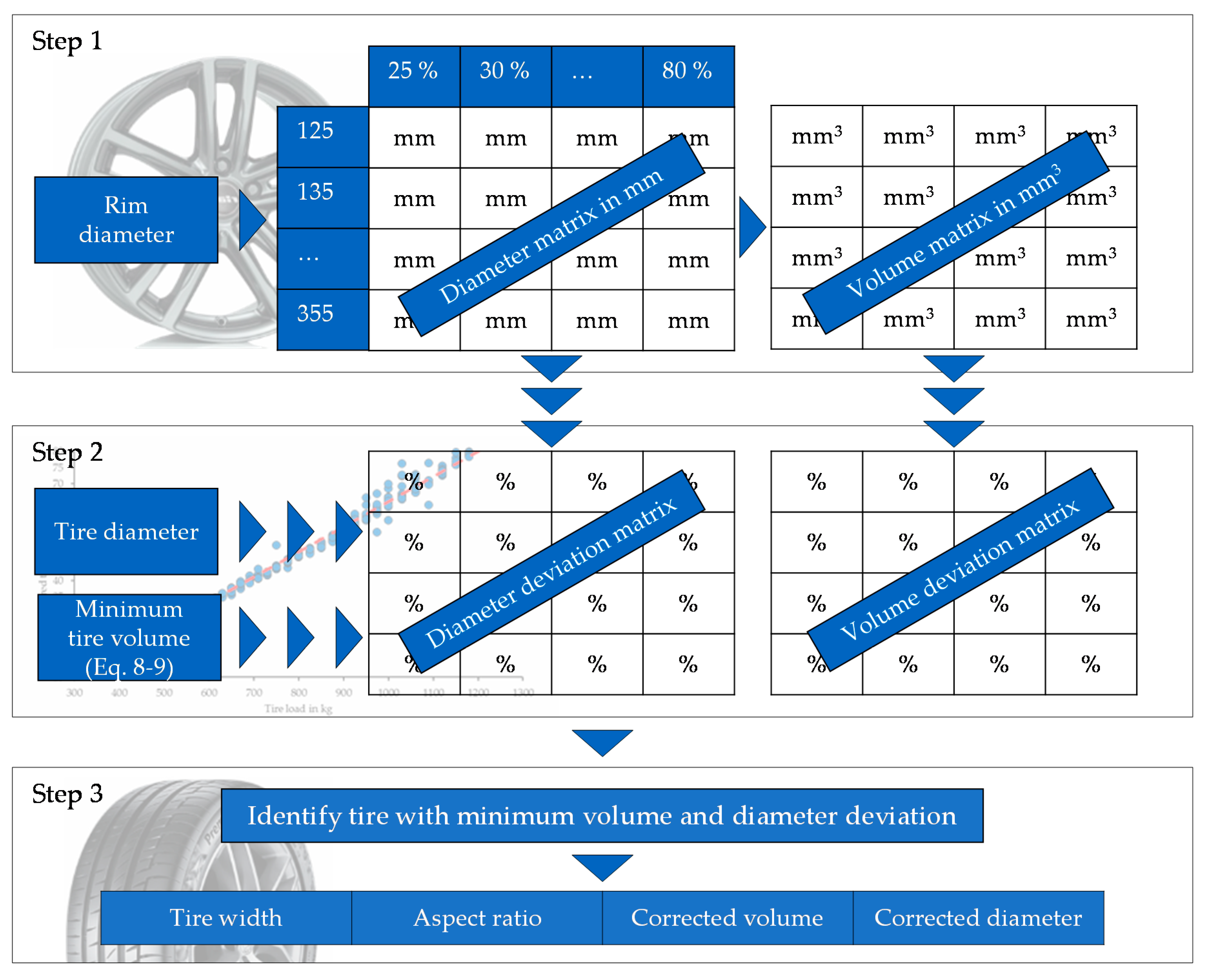
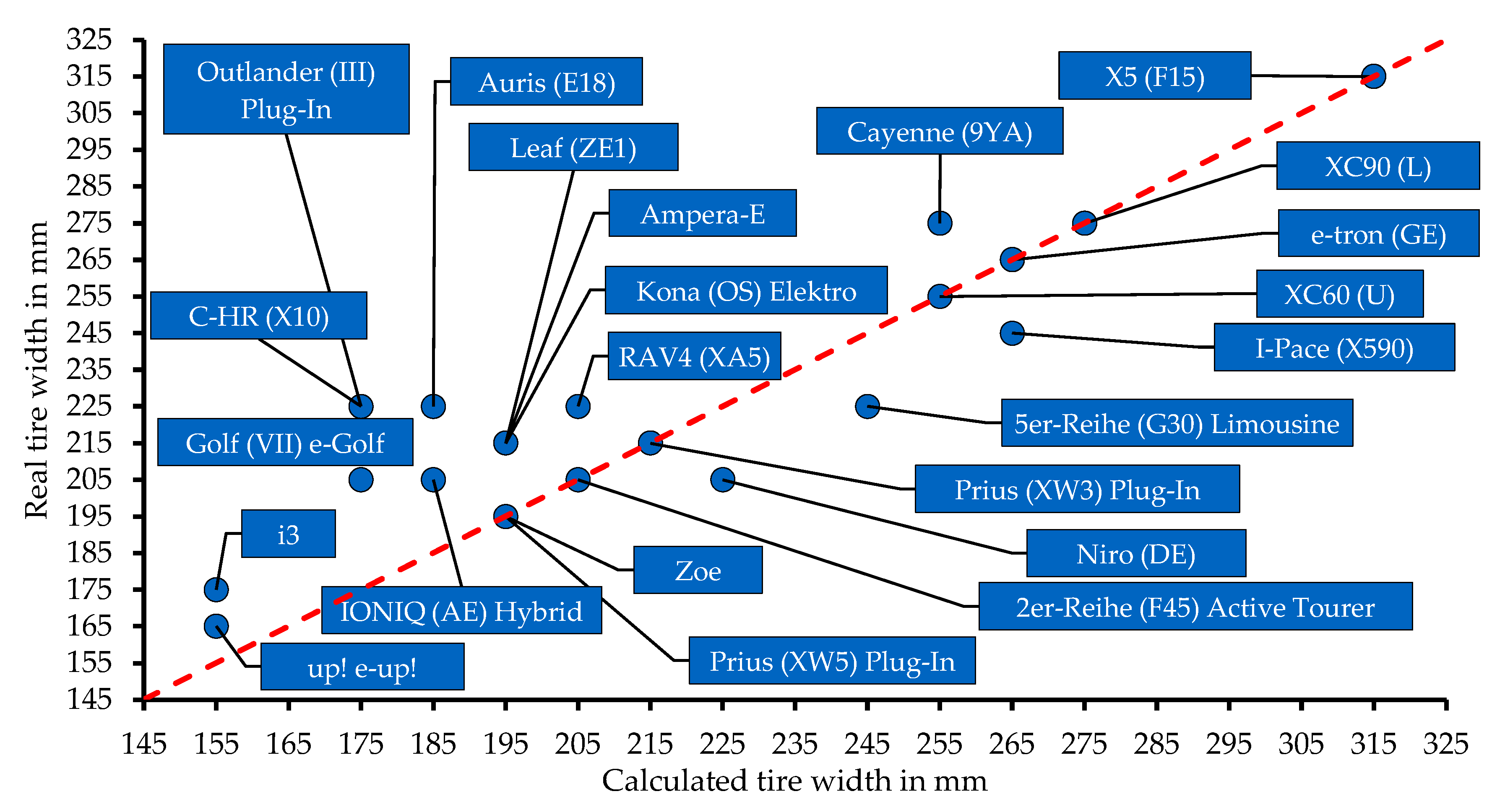
2.4. Tire Model
2.4.1. Volumetric Model
2.4.2. Weight Model
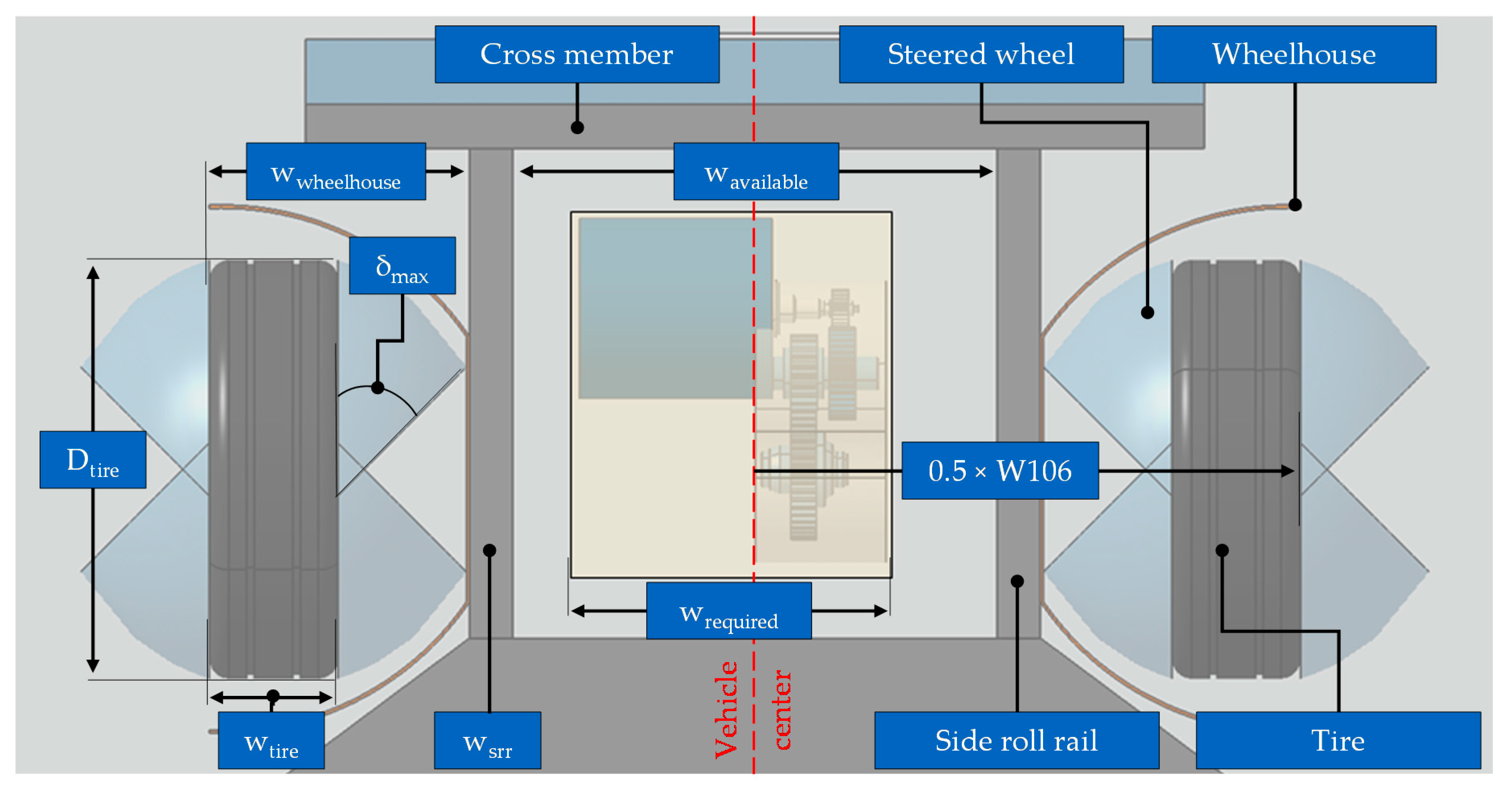
2.5. Wheelhouse Model
3. Model Evaluation and Results
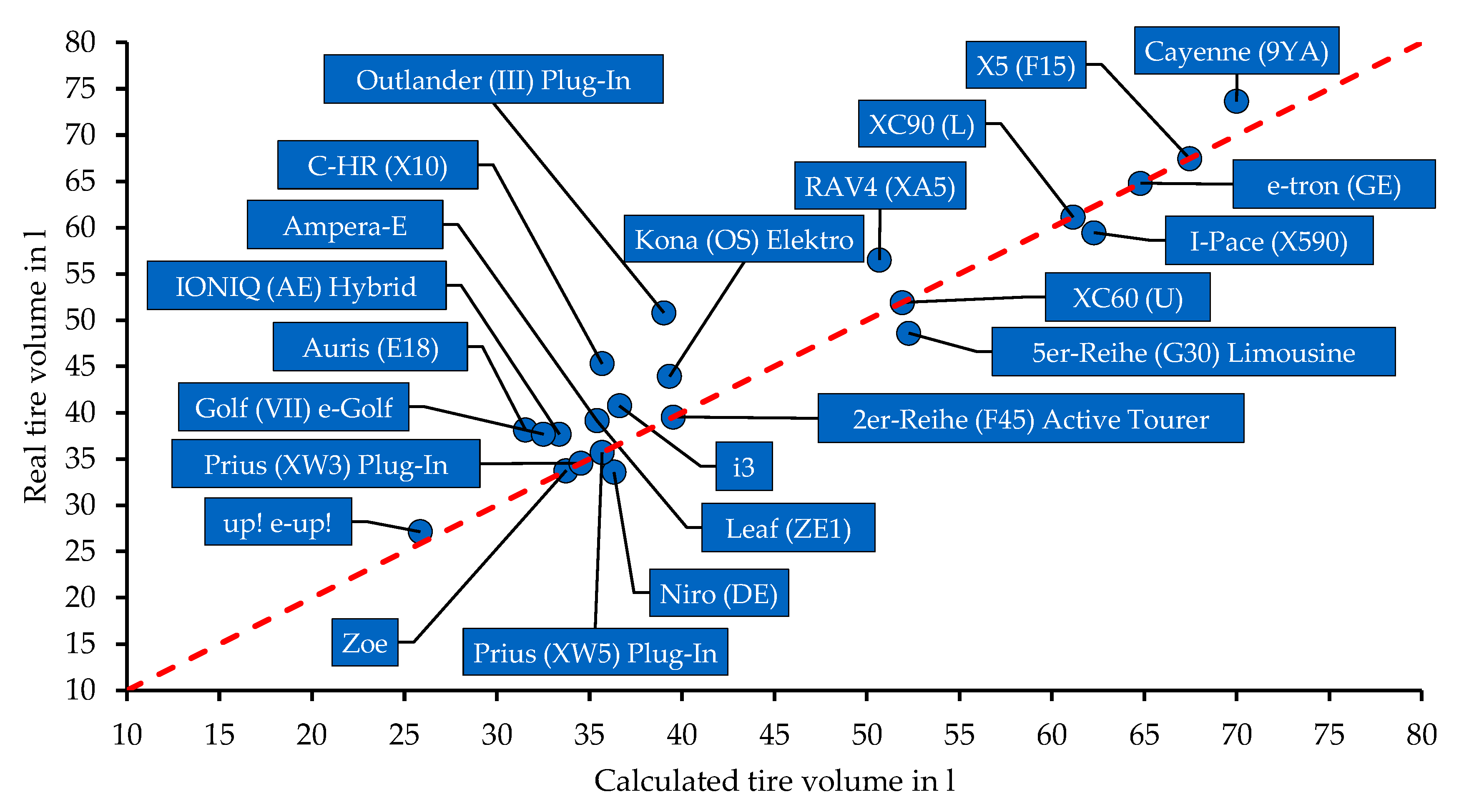
3.1. Model Evaluation
3.2. Quantification of the Secondary Effects on the Wheel Components
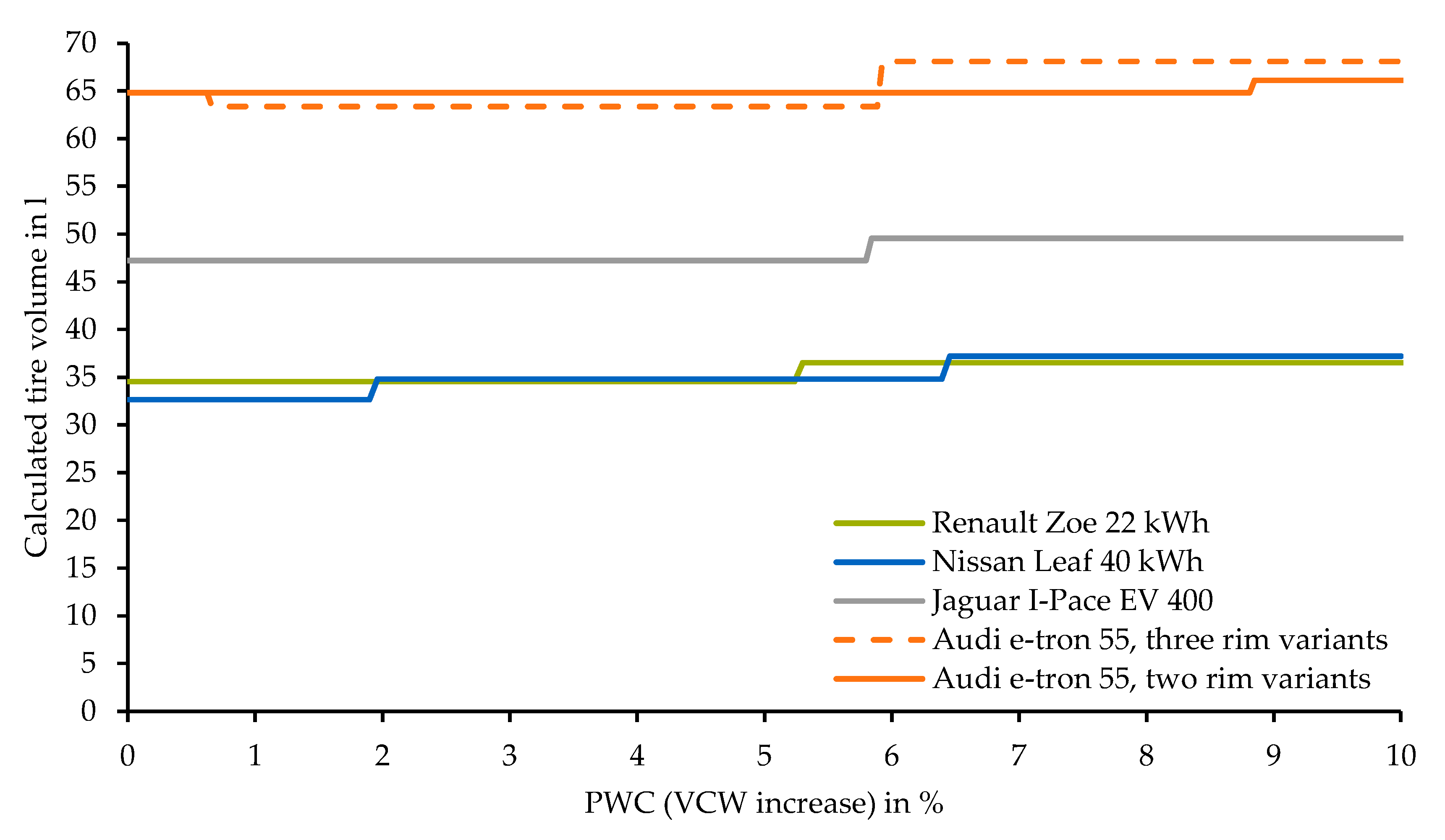
3.2.1. Influence on the Wheel Volume (SVC on Component Level)
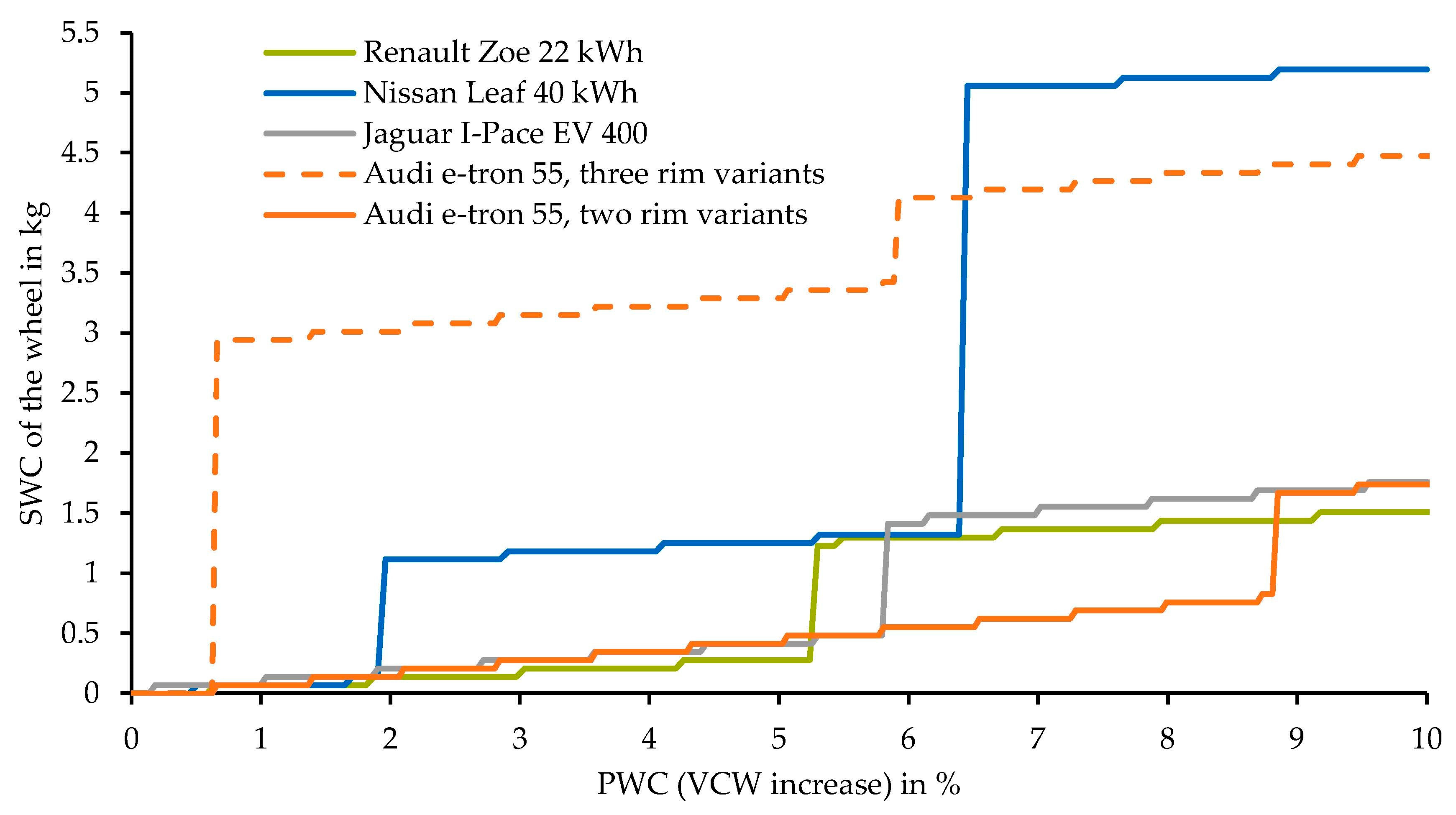
3.2.2. Influence on the Wheel Weight (SWC on Component Level)
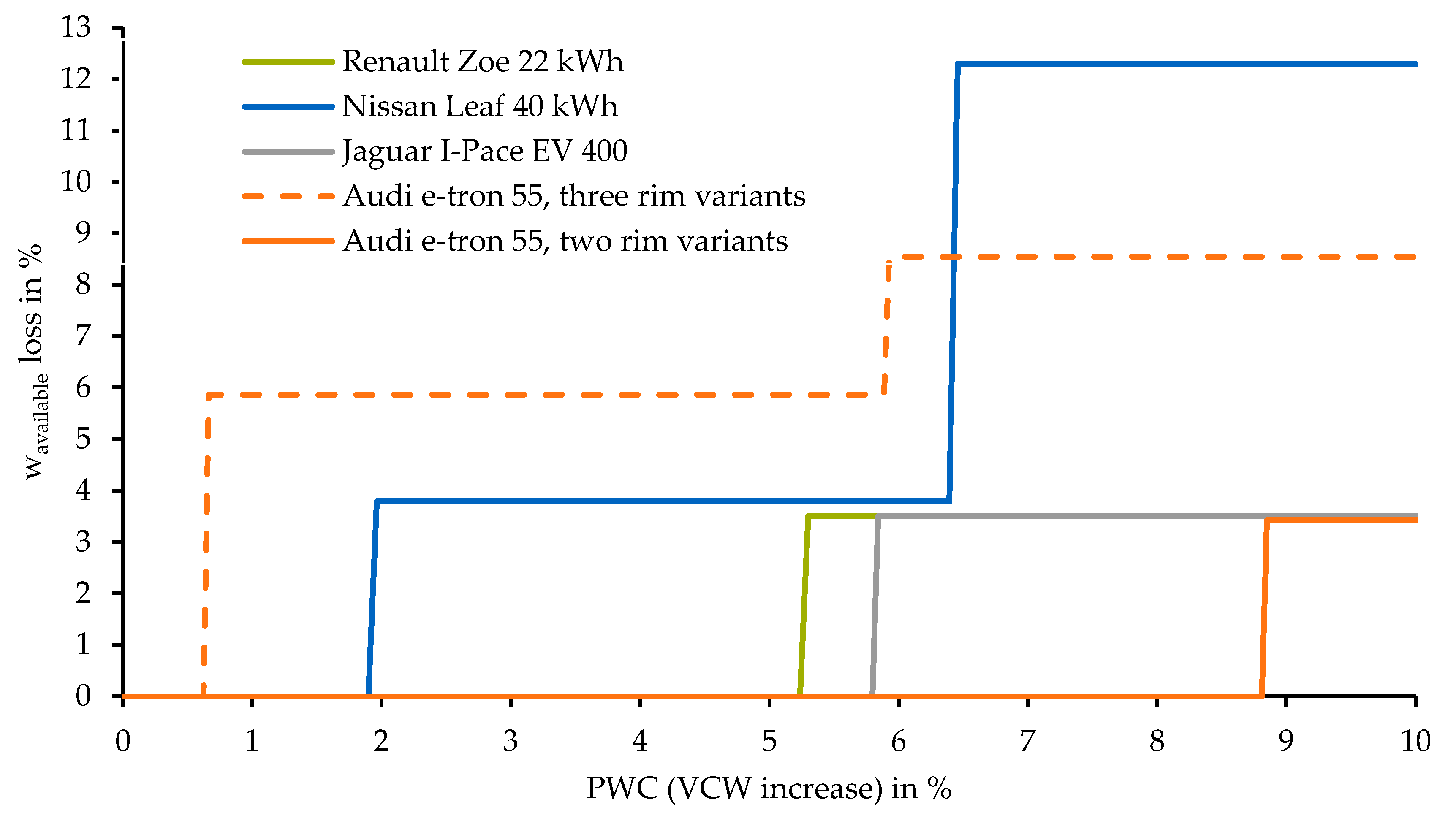
3.2.3. Influence on the wavailable (SVC on Vehicle Level)
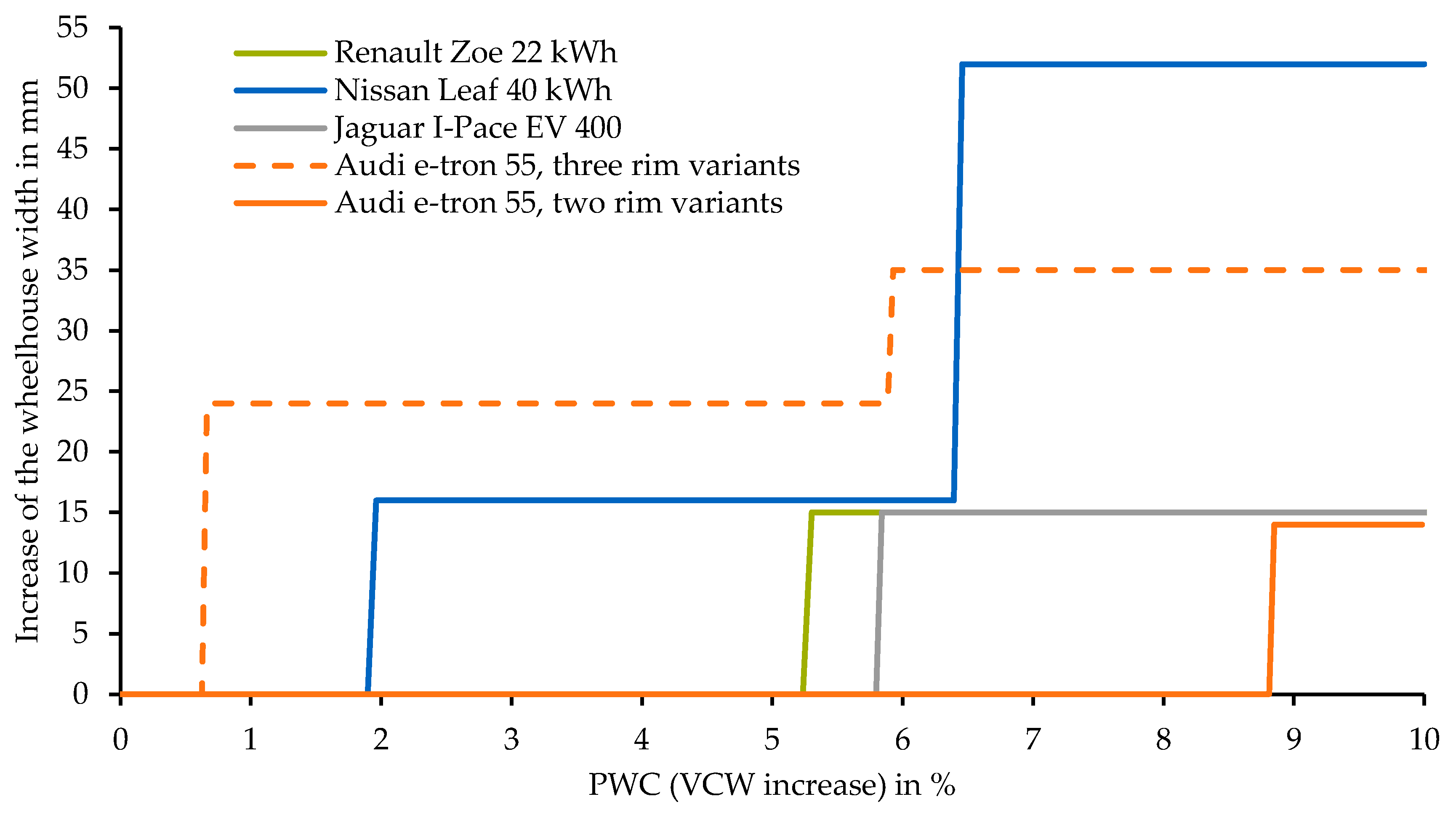
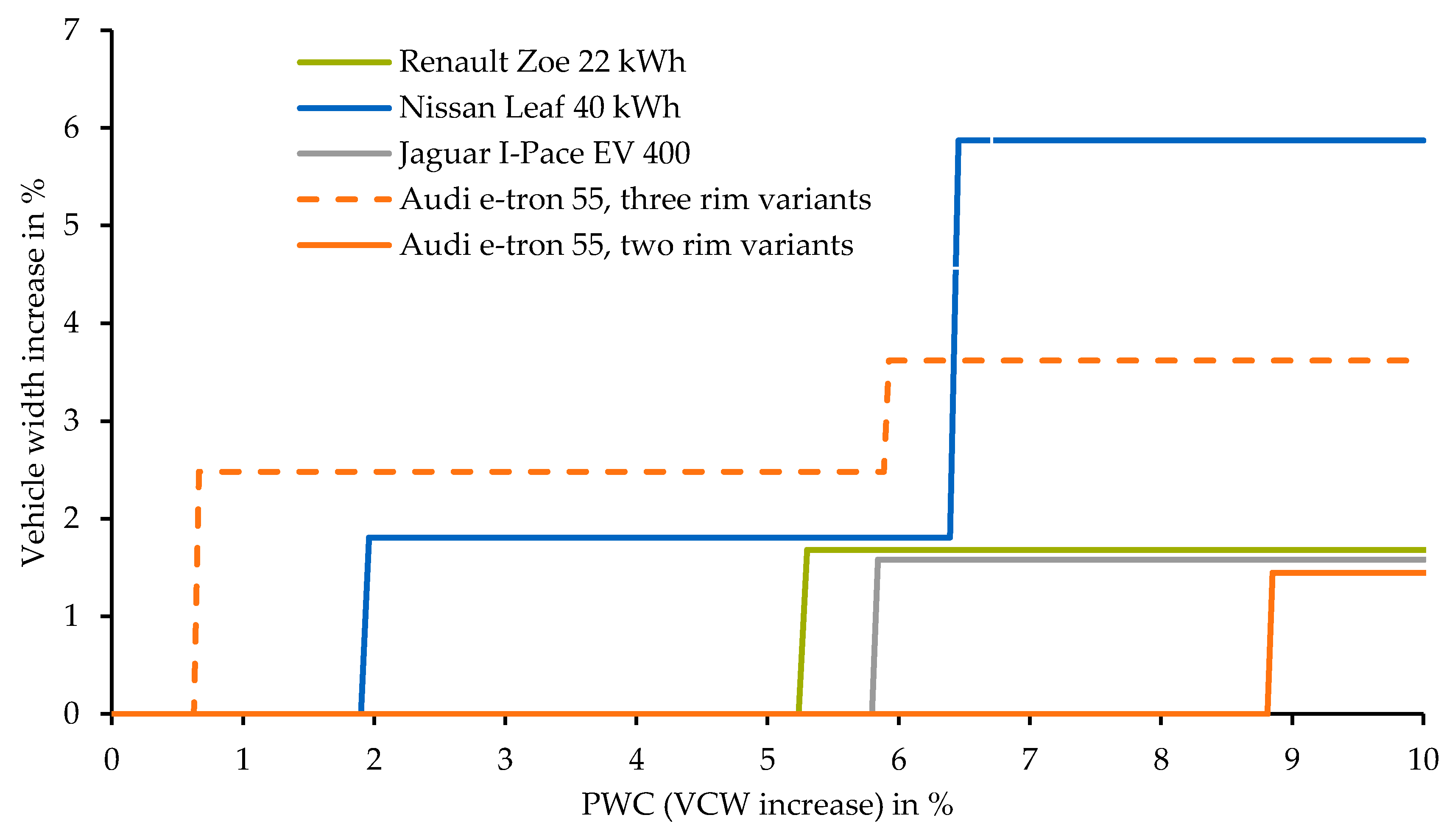
3.2.4. Influence on the Vehicle Outer Dimensions (SVC on Vehicle Level)
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- All: the vehicle is used for all models;
- BV: brake volume (Section 2.2.1);
- BW: brake weight (Section 2.2.2);
- RD: minimum rim diameter (Section 2.3.1);
- RW: rim weight (Section 2.3.2);
- TW: tire weight (Section 2.4.2).

| Brand | Vehicle Model | ADAC Model Series | Production Year | Wheel Model |
|---|---|---|---|---|
| Audi | e-tron 55 quattro | e-tron (GE) (from 03/19) | 2019 | All |
| Audi | A3 Sportback e-tron | A3 (8V) Sportback e-tron (01/15–05/16) | 2015 | BV, RD |
| BAIC | EX360 Fashion | - | 2018 | BW, TW, RW |
| BMW | 2 Series Active Tourer 225 xe Luxury | 2-er Reihe(F45) Active Tourer (09/14-02/18) | 2016 | All |
| BMW | 5 Series 530e iPerformance | 5-er Reihe (G30) Limousine (from 02/17) | 2018 | All |
| BMW | i3 Range Extender Urban Life | i3 (11/13–08/17) | 2014 | All |
| BMW | i3 Range Extender | i3 (from 11/17) | 2018 | BV, RD |
| BMW | X1 xDrive 25Le | - | 2018 | BW, TW, RW |
| BMW | X5 2.0 xDrive40e | X5 (F15) (11/13–07/18) | 2016 | BV, RD |
| BYD | E6 Jingying Ban | - | 2015 | BW, TW, RW |
| BYD | Song DM 1.5 comfort | - | 2017 | BW, TW, RW |
| BYD | Tang 2.0 Ultimate | - | 2015 | BW, TW, RW |
| BYD | Tang EV 600D ChuangLing | - | 2019 | BW |
| BYD | Yuan EV 360 Cool | - | 2017 | BW, TW, RW |
| Chevrolet | Malibu Eco 2.4 | - | 2011 | BV |
| Chevrolet | Volt 1.4 Voltec | Volt (11/11–08/14) | 2011 | All |
| Chevrolet | Volt 1.5 Premier | - | 2015 | BV |
| Citroen | DS5 Hybrid4 So Chic | DS 5 (03/12–05/15) | 2012 | All |
| Ford | C-Max Energi SEL 2.0 | C-MAX (II) (11/10–05/15) | 2013 | BV |
| Denza | EV Executive | - | 2014 | BW, TW, RW |
| Gac Ne | Aion S Max 630 | - | 2019 | BW |
| Geely | Emgrand EV300 elite | - | 2015 | BW, TW, RW |
| Geometry | A Standard range power edition | - | 2019 | BW |
| Honda | CR-V 2.0 Hybrid Comfort | CR-V (V) (from 10/18) | 2019 | All |
| Hyundai | Ioniq 1.6 Plug-in | IONIQ (AE) Hybrid (10/16–07/19) | 2017 | All |
| Hyundai | Kona electric Executive 64 kWh | Kona (OS) Elektro (from 08/18) | 2018 | All |
| Jaguar | I-Pace EV 400 | I-Pace (X590) (from 10/18) | 2018 | All |
| Brand | Vehicle Model | ADAC Model Series | Production Year | Wheel Model |
|---|---|---|---|---|
| Kia | Niro 1.6 GDi HEV Active | Niro (DE) (09/16–05/19) | 2016 | All |
| Lexus | GS 450h F-Sport | GS (L10) (06/12–08/15) | 2012 | All |
| Maxus | EG10 Luxury | 2017 | BW, TW, RW | |
| Mercedes | EQC 400 4MATIC 1886 Edition | EQC (293) (from 06/19) | 2019 | All |
| Mercedes | GLE 550e 3.0 4Matic | GLE (166) (08/15–10/18) | 2016 | BV, RD |
| Mitsubishi | I-Miev | i-MiEV (12/10–04/14) | 2011 | RD |
| Mitsubishi | Outlander PHEV Business Nav Safety | Outlander (III) Plug-In Hybrid (05/14-10/15) | 2014 | All |
| Mitsubishi | Outlander PHEV GT S-AWC | Outlander (III) Plug-In Hybrid (10/15-08/18) | 2017 | BV, RD |
| Nio | ES8 Base | - | 2019 | BW, TW, RW |
| Nio | ES8 founding | - | 2019 | TW, RW |
| Nissan | Leaf 24 | Leaf (ZE0) (04/12–06/13) | 2011 | All |
| Nissan | Leaf 30 | Leaf (ZE0) (06/13–11/17) | 2016 | BV, RD |
| Nissan | Leaf Tekna 40 | Leaf (ZE1) (from 01/18) | 2018 | All |
| Opel | Ampera-e | Ampera-E (07/17–06/19) | 2017 | All |
| Porsche | Cayenne e-Hybrid | Cayenne (9YA) (from 11/17) | 2018 | All |
| Porsche | Cayenne S-Hybrid | Cayenne (958) (10/14–12/17) | 2014 | BV, RD |
| Renault | Kangoo Maxi Z.E. 33 | Kangoo (II) Z.E. Rapid (from 05/13) | 2017 | BW |
| Renault | Zoe R135 Edition One | Zoe (from 10/19) | 2019 | BW |
| Renault | Zoe ZE Intens | Zoe (06/13–09/19) | 2013 | All |
| Roewe | 550 1.5 Plug-in hybrid | - | 2016 | BW, TW, RW |
| Roewe | ei5 Topline | - | 2018 | BW, TW, RW |
| Roewe | Marvel X AWD | - | 2018 | BW, TW, RW |
| Roewe | RX5 1.5 plug-in Hybrid | - | 2017 | BW, TW, RW |
| Roewe | RX5 EV400 | - | 2017 | BW, TW, RW |
| Tesla | Model-S 60 kWh | Model S (08/13–04/16) | 2013 | BV, RD |
| Tesla | Model-X P90D | Model X (from 06/16) | 2016 | BV, RD |
| Toyota | Auris 1.8 HSD Dynamic nav. comfort | Auris (E18) (01/13–08/15) | 2013 | All |
| Toyota | Camry Hybrid | No match found in ADAC | 2018 | BV |
| Toyota | C-HR 1.8 Hybrid | C-HR (X10) (10/16–11/19) | 2018 | All |
| Toyota | Corolla 1.8 Hybrid elite | Corolla (E17) (12/16–12/18) | 2017 | All |
| Brand | Vehicle Model | ADAC Model Series | Production Year | Wheel Model |
|---|---|---|---|---|
| Toyota | Corolla 2.0 Hybrid Collection | Corolla (E21) (from 04/19) | 2019 | All |
| Toyota | Levin 1.8 Hybrid CVT Zunxiang | No match found in ADAC | 2018 | BW, RW |
| Toyota | Prius 1.8 Hybrid Four Touring | Prius (XW3) (04/12–02/16) | 2015 | BV |
| Toyota | Prius 1.8 PHV | Prius (XW5) Plug-In (from 03/17) | 2017 | All |
| Toyota | Prius 1.8 Plug-in Hybrid | Prius (XW3) Plug-In (10/12–12/16) | 2012 | BV, RD |
| Toyota | Prius 1.8 VVT-i Hybrid Lounge | Prius (XW5) (from 03/16) | 2016 | All |
| Toyota | RAV4 2.5 Hybrid Lounge | RAV4 (XA5) (from 01/19) | 2019 | All |
| Volkswagen | Golf VII e-Golf 85 kW | Golf (VII) e-Golf (03/14–10/16) | 2014 | All |
| Volkswagen | Golf VII e-Golf 100 kW | Golf (VII) e-Golf (04/17–05/20) | 2018 | BV |
| Volkswagen | Golf VII GTE | Golf (VII) GTE (12/14–10/16) | 2015 | All |
| Volkswagen | Jetta Hybrid 1.4 | Jetta IV (01/11–08/14) | 2013 | BV, RD |
| Volkswagen | Up! e-Up! | up! e-up! (04/13–06/16) | 2013 | All |
| Volvo | XC60 2.0 T8 Twin Engine AWD R-Design | XC60 (U) (from 07/17) | 2018 | All |
| Volvo | XC90 T8 Inscription | XC90 (L) (from 01/15) | 2015 | BV, RD |
| Weltmeister | EX5 500 Extra | No match found in ADAC | 2019 | BW, TW, RW |
| Zotye | E200 | No match found in ADAC | 2016 | BW, TW, RW |
| Symbol | Description | Unit |
|---|---|---|
| mveh max | Vehicle gross weight | kg |
| vveh max | Maximum vehicle speed | km/h |
| tveh 0–100 | Acceleration time from 0 to 100 km/h | s |
| Dbrake | Brake disc diameter | mm |
| mbrake | Brake disc weight | kg |
| Drim min ADAC | Smallest rim diameter in a model series | mm |
| Drim clearance | Rim radial clearance | mm |
| mrim | Rim weight | kg |
| Drim | Rim diameter | mm or inches |
| Dtire | Tire diameter | mm |
| h% | Nominal aspect ratio | / |
| wtire | Tire section width | mm |
| Vtire | Tire volume | mm3 |
| m88% | Loaded vehicle weight according to the 88% rule | kg |
| m100% | Loaded vehicle weight according to the 100% rule | kg |
| lF, 88% | Distance between the center of mass and the front axle for the 88% rule | mm |
| lF,100% | Distance between the center of mass and the front axle for the 100% rule | mm |
| Ltire88% | Tire load according to the 88% rule | kg |
| Ltire100% | Tire load according to the 100% rule | kg |
| Ltire | Tire load | kg |
| VtireSL | Tire volume allowing a standard-load tire to carry a given load | mm3 |
| VtireEL | Tire volume allowing an extra-load tire to carry a given load | mm3 |
| mtire | Tire weight | kg |
| wwheelhouse | Wheelhouse width | mm |
| W106 | Vehicle width at the front axle | mm |
| wsrr | Width of the side roll rail | mm |
| wavailable | Available space at the front axle | mm |
| wrequired | Space required by the powertrain components | mm |
| δmax | Maximum wheel steering angle | deg |
| Rturning | Vehicle turning radius | mm |
| L101 | Vehicle wheelbase | mm |
| L104 | Vehicle front overhang | mm |
| W103 | Vehicle maximum width (without side mirrors) | mm |
| W101 | Vehicle front track width | mm |
| mBIW | BIW weight | kg |
| Vveh | Vehicle volume | m3 |
| L105 | Vehicle rear overhang | mm |
| H100 | Vehicle height | mm |
| Brand | ADAC Model Series | VCW in kg | VGW in kg |
|---|---|---|---|
| Audi | e-tron (GE) (from 03/2019) | 2565 | 3130 |
| BMW | 2er-Reihe (F45) Active Tourer (09/14–02/18) | 1735 | 2180 |
| BMW | 5er-Reihe (G30) Limousine (from 02/17) | 1845 | 2440 |
| BMW | i3 (11/13–08/17) | 1415 | 1755 |
| BMW | X5 (F15) (11/13–07/18) | 2305 | 2980 |
| Hyundai | IONIQ (AE) Hybrid (10/16–07/19) | 1580 | 1970 |
| Hyundai | Kona (OS) Elektro (from 08/18) | 1760 | 2170 |
| Jaguar | I-Pace (X590) (from 10/18) | 2208 | 2670 |
| Kia | Niro (DE) (09/16–05/19) | 1594 | 2000 |
| Mitsubishi | Outlander (III) Plug-In Hybrid (05/14–10/15) | 1945 | 2310 |
| Nissan | Leaf (ZE1) (from 01/18) | 1707 | 2140 |
| Opel | Ampera-E (07/17–06/19) | 1691 | 2056 |
| Porsche | Cayenne (9YA) (from 11/17) | 2370 | 3030 |
| Renault | Zoe (06/13–09/19) | 1575 | 1954 |
| Toyota | Auris (E18) (01/13–08/15) | 1420 | 1915 |
| Toyota | C-HR (X10) (10/16–11/19) | 1460 | 1930 |
| Toyota | Prius (XW5) Plug-In (from 03/17) | 1605 | 1855 |
| Toyota | Prius (XW3) Plug-In (10/12–12/16) | 1500 | 1840 |
| Toyota | RAV4 (XA5) (from 01/19) | 1795 | 2185 |
| VW | Golf VII e-Golf (03/14–10/16) | 1585 | 1980 |
| VW | up! e-up! (04/13–06/16) | 1215 | 1500 |
| Volvo | XC60 (U) (from 07/17) | 2223 | 2660 |
| Volvo | XC90 (L) (from 01/15) | 2384 | 3010 |
References
- The European Parliament and the Council of the European Union. Regulation (EU) 2019/631 of the European Parliament and of the Council of 17 April 2019 setting CO2 emission performance standards for new passenger cars and for new light commercial vehicles, and repealing Regulations (EC) No 443/2009 and (EU) No 510/2011. Off. J. Eur. Union 2019, 111, 13–53. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32019R0631 (accessed on 13 June 2020).
- The International Council on Clean Transportation. CO2 Emission Standards for Passenger Cars and Light-Commercial Vehicles in the European Union; ICCT: Washington, DC, USA, 2019; Available online: https://theicct.org/sites/default/files/publications/EU-LCV-CO2-2030_ICCTupdate_201901.pdf (accessed on 21 June 2020).
- Nicoletti, L.; Mayer, S.; Brönner, M.; Schockenhoff, F.; Markus, L. Design Parameters for the Early Development Phase of Battery Electric Vehicles. WEVJ 2020, 11, 47. [Google Scholar] [CrossRef]
- ADAC. VW e-Golf (04/17–05/20): Technische Daten, Preise. Available online: https://www.adac.de/rund-ums-fahrzeug/autokatalog/marken-modelle/vw/golf/vii-facelift/266575/## (accessed on 7 June 2020).
- ADAC. VW Golf 1.0 TSI BMT Trendline (03/17–08/18). Available online: https://www.adac.de/rund-ums-fahrzeug/autokatalog/marken-modelle/vw/golf/vii-facelift/266199/## (accessed on 7 June 2020).
- Fuchs, S. Verfahren zur parameterbasierten Gewichtsabschätzung neuer Fahrzeugkonzepte: Ein Werkzeug zur Spezifikation von effizienten Antriebstopologien für Elektrofahrzeuge. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2014. Available online: https://mediatum.ub.tum.de/1207264 (accessed on 4 June 2020).
- Yanni, T.; Venhovens, P.J.T. Impact and Sensitivity of Vehicle Design Parameters on Fuel Economy Estimates. In Proceedings of the SAE 2010 World Congress & Exhibition, Detroit, MI, USA, 13–15 April 2010. [Google Scholar] [CrossRef]
- Mau, R.J.; Venhovens, P.J. Parametric vehicle mass estimation for optimization. Int. J. Veh. Des. 2016, 72, 1–16. [Google Scholar] [CrossRef]
- Felgenhauer, M.; Nicoletti, L.; Schockenhoff, F.; Angerer, C.; Lienkamp, M. Empiric Weight Model for the Early Phase of Vehicle Architecture Design. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019. [Google Scholar] [CrossRef]
- Alonso, E.; Lee, T.M.; Bjelkengren, C.; Roth, R.; Kirchain, R.E. Evaluating the potential for secondary mass savings in vehicle lightweighting. Environ. Sci. Technol. 2012, 46, 2893–2901. [Google Scholar] [CrossRef] [PubMed]
- Wiedemann, E.; Meurle, J.; Lienkamp, M. Optimization of Electric Vehicle Concepts Based on Customer-Relevant Characteristics. SAE Tech. Pap. Ser. 2012. [Google Scholar] [CrossRef]
- Wiedemann, E. Ableitung von Elektrofahrzeugkonzepten aus Eigenschaftszielen. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2014. [Google Scholar]
- Fuchs, S.; Lienkamp, M. Parametric Modelling of Mass and Efficiency of New Vehicle Concepts. ATZ Worldw. 2013, 115, 60–66. [Google Scholar] [CrossRef]
- Angerer, C.R. Antriebskonzept-Optimierung für Batterieelektrische Allradfahrzeuge. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2020. [Google Scholar]
- Angerer, C.; Krapf, S.; Buß, A.; Lienkamp, M. Holistic Modeling and Optimization of Electric Vehicle Powertrains Considering Longitudinal Performance, Vehicle Dynamics, Costs and Energy Consumption. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar] [CrossRef]
- Del Pero, F.; Berzi, L.; Antonacci, A.; Delogu, M. Automotive Lightweight Design: Simulation Modeling of Mass-Related Consumption for Electric Vehicles. Machines 2020, 8, 51. [Google Scholar] [CrossRef]
- Leebmann24.de. BMW Online Shop. Originalprodukte Online Kaufen—Leebmann24.de. Available online: https://www.leebmann24.de/## (accessed on 15 May 2020).
- Continental AG. Reifen von Continental. Available online: https://www.continental-reifen.de/autoreifen/reifen?cartype=car&season=summer## (accessed on 20 April 2020).
- A2mac1. a2mac1 Automotive Benchmarking. Available online: https://portal.a2mac1.com/de/home-2/## (accessed on 1 February 2020).
- ADAC. Allgemeine Deutsche Automobilclub. Available online: https://www.adac.de/## (accessed on 14 March 2020).
- ADAC. Audi e-tron 1.Generation: Technische Daten, Preise. Available online: https://www.adac.de/rund-ums-fahrzeug/autokatalog/marken-modelle/audi/e-tron/1generation/## (accessed on 27 May 2020).
- German Institute for Standardization. DIN 70020-3:2008-03. Road Vehicles—Automotive Engineering—Part 3: Testing Conditions, Maximum Speed, Acceleration and Elasticity, Mass, Terms, Miscellaneous; German Institute for Standardization: Berlin, Germany, 2008. [Google Scholar]
- Bundesministerium der Justiz und für Verbraucherschutz. Straßenverkehrs-Zulassungs-Ordnung (StVZO): §34 Achslast und Gesamtgewicht. Available online: https://www.gesetze-im-internet.de/stvzo_2012/__34.html## (accessed on 20 April 2020).
- Reif, K. Bremsen und Bremsregelsysteme; Vieweg+Teubner Verlag: Wiesbaden, Germany; GWV Fachverlage GmbH: Wiesbaden, Germany, 2010; ISBN 978-3-834-81311-4. [Google Scholar]
- Duval-Destin, M.; Kropf, T.; Abadie, V.; Fausten, M. Auswirkungen eines Elektroantriebs auf das Bremssystem. ATZ Automob. Z 2011, 113, 638–643. [Google Scholar] [CrossRef]
- Wagner, D.; Hoffmann, J.; Lienkamp, M. Downsizing potential of wheel brakes in electric vehicles. In Proceedings of the 8th International Munich Chassis Symposium, Munich, Germany, 20–21 June 2017; pp. 661–691. [Google Scholar] [CrossRef]
- UN/ECE. Regulation No 13-H of the Economic Commission for Europe of the United Nations (UN/ECE)—Uniform provisions concerning the approval of passenger cars with regard to braking. Off. J. Eur. Union 2015, 335, 1–84. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A42015X1222%2801%29 (accessed on 30 May 2020).
- Doerr, J.; Ardey, N.; Mendl, G.; Fröhlich, G.; Straßer, R.; Laudenbach, T. The new full electric drivetrain of the Audi e-tron. In Der Antrieb von Morgen 2019; Springer Vieweg: Wiesbaden, Germany, 2019; pp. 13–37. [Google Scholar] [CrossRef]
- Dietz, J.; Helmers, E.; Türk, O.; Beringer, F.; Brand, U.; Walter, J. Ökobilanzierung von Elektrofahrzeugen. Available online: https://www.stoffstrom.org/fileadmin/userdaten/dokumente/Netzwerk_Elektromobilitaet/8a_Oekobilanzierung_von_Elektrofahrzeugen_Netzwerk_E-Mobilitaet_RLP.pdf## (accessed on 1 June 2020).
- Breuer, B. Bremsenhandbuch: Grundlagen, Komponenten, Systeme, Fahrdynamik; Vieweg Verlag: Wiesbaden, Germany, 2004; ISBN 978-3-322-99536-0. [Google Scholar]
- Textar Brake Technology. Benchmark Testing: Ams-Test: The Test: Do the Pads Perform When Hot and Cold? Available online: https://textar.com/en/ams-test/## (accessed on 15 July 2020).
- European Tyre and Rim Technical Organisation (ETRTO). Standards Manual: ETRTO—The European Tyre and Rim Technical Organisation. 2014. Available online: https://www.etrto.org/Publications/Available/Standards-Manual (accessed on 22 May 2020).
- Luccarelli, M.; Lienkamp, M.; Matt, D.; Spena, P.R. Automotive Design Quantification: Parameters Defining Exterior Proportions According to Car Segment. SAE Tech. Pap. Ser. 2014. [Google Scholar] [CrossRef]
- Leister, G. Passenger Car Tires and Wheels: Development—Manufacturing—Application; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-50117-8. [Google Scholar]
- Jazar, R.N. Vehicle Dynamics: Theory and Application; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-53440-4. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









| Vehicle Characteristic | VW Golf 1.0 TSI BMT | VW Golf (VII) e-Golf | Delta |
|---|---|---|---|
| Length | 4258 mm | 4270 mm | 12 mm |
| Width | 1799 mm | 1799 mm | 0 mm |
| Height | 1492 mm | 1482 mm | 10 mm |
| Curb weight (with driver) | 1026 kg | 1615 kg | 589 kg |
| Power | 63 kW | 100 kW | 37 kW |
| Top speed | 180 km/h | 150 km/h | 30 km/h |
| Range | 1219 km | 231 km | 988 km |
| Energy consumption | 4.1 L/100 km | 12.7 kWh/100 km | - |
| Vehicle Model (Model Series) | Initial VCW | Min–Max Diameter Rim Variants | Mean Outer Tire Diameter |
|---|---|---|---|
| Renault Zoe 22 kWh (Zoe (06/13-09/19)) | 1547 kg | 16”–17” | 621 mm |
| Nissan Leaf 40 kWh (Leaf (ZE1) (from 01/18)) | 1580 kg | 16”–17” | 640 mm |
| Audi e-tron 55 quattro (e-tron (GE) (from 03/19)) | 2565 kg | 19”–21” | 765 mm |
| Jaguar I-Pace (I-Pace (X590) (from 10/18)) | 2208 kg | 18”–22” | 759 mm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nicoletti, L.; Romano, A.; König, A.; Schockenhoff, F.; Lienkamp, M. Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components. World Electr. Veh. J. 2020, 11, 63. https://doi.org/10.3390/wevj11040063
Nicoletti L, Romano A, König A, Schockenhoff F, Lienkamp M. Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components. World Electric Vehicle Journal. 2020; 11(4):63. https://doi.org/10.3390/wevj11040063
Chicago/Turabian StyleNicoletti, Lorenzo, Andrea Romano, Adrian König, Ferdinand Schockenhoff, and Markus Lienkamp. 2020. "Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components" World Electric Vehicle Journal 11, no. 4: 63. https://doi.org/10.3390/wevj11040063
APA StyleNicoletti, L., Romano, A., König, A., Schockenhoff, F., & Lienkamp, M. (2020). Parametric Modeling of Mass and Volume Effects for Battery Electric Vehicles, with Focus on the Wheel Components. World Electric Vehicle Journal, 11(4), 63. https://doi.org/10.3390/wevj11040063