
A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network

Abstract
:1. Introduction
2. Problem Description
3. Electric Vehicle (EV) Charging Fault Warning Based on Adaptive Deep Belief Network (ADBN)
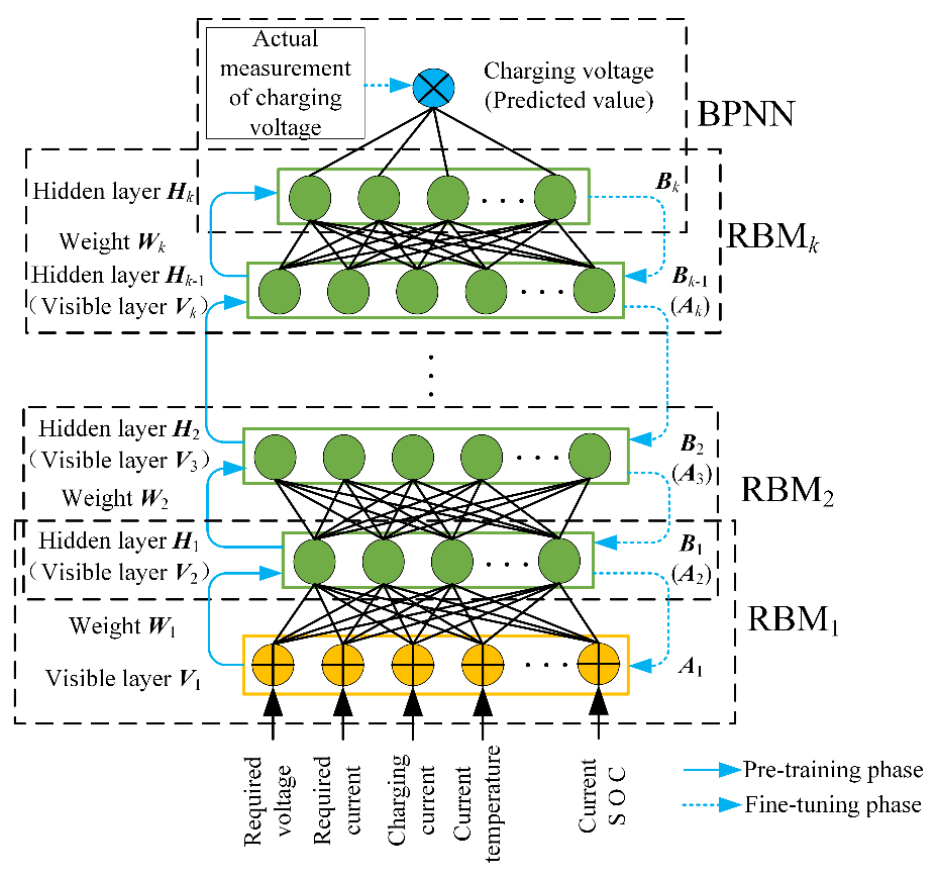
3.1. Structure and Training Process of DBN
3.2. NAdam Algorithm
3.3. Pearson Coefficient
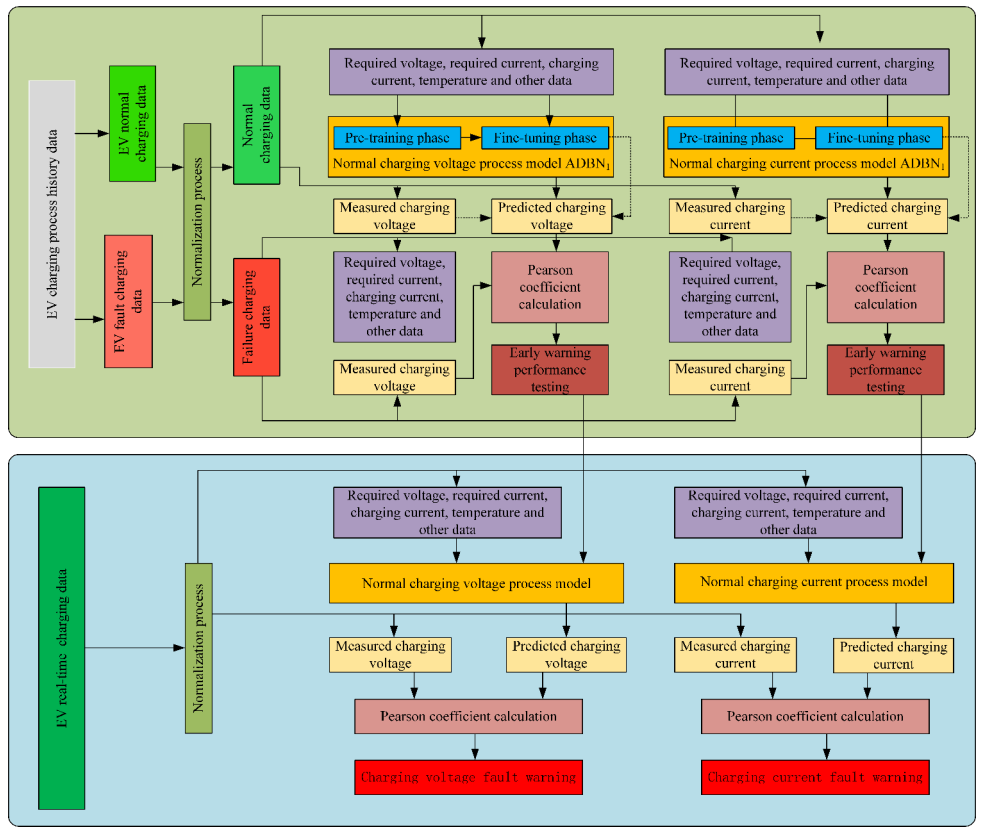
3.4. EV Charging Process Fault Warning Process
- Obtain the historical data of EV charging process, and divide it into normal charging data and fault charging data.
- Data normalization of normal charging data and fault charging data.
- Constructing the normal charging voltage model ADBN1 and the normal charging current model ADBN2 for EV by two stages of pre-training and fine-tuning using normal charging data.
- Input the fault charging data into the constructed ADBN1 and ADBN2 models to predict the charging voltage and charging current, calculate the Pearson coefficient between the predicted charging voltage and charging current and the measured charging voltage and charging current, perform fault warning when the Pearson coefficient is less than the set expectation value. Calculate the ratio between the number of fault warnings and the actual number of faults to test the warning performance of the models.
- The ADBN model that meets the requirements is applied to real-time charging fault warning for the EV.
4. Implementation of Fault Warning for EV Charging Process
4.1. Data Selection and Pre-Processing
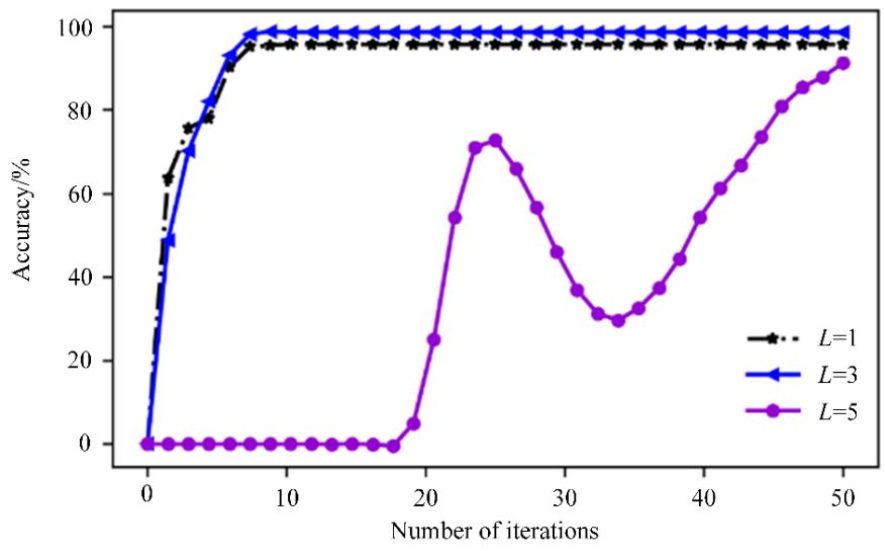
4.2. Training of ADBN Model
4.3. Method Validation and Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| EV | electric vehicle |
| BMS | battery management system |
| SOC | state of charge |
| ADBN | adaptive deep belief network |
| NAdam | Nesterov-accelerated adaptive moment estimation |
| DBN | deep belief network |
| BPNN | back propagation neural network |
| VMD | variational mode decomposition |
| UAV | unmanned aerial vehicle |
| RBM | restricted Boltzmann machine |
| Adam | adaptive moment estimation |
References
- Carbon, C.C.; Gebauer, F. The safe-range-inventory (SRI): An assistance tool for optimizing the charging infrastructure for electric vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2017, 47, 101–113. [Google Scholar] [CrossRef]
- Hu, J.; Gao, Z.W. SOC prediction of electric vehicle power battery based on data driven. Automot. Eng. 2021, 43, 1–9. [Google Scholar]
- Tran, M.K.; Fowler, M. A Review of Lithium-Ion Battery Fault Diagnostic Algorithms: Current Progress and Future Challenges. Algorithms 2020, 13, 62. [Google Scholar] [CrossRef] [Green Version]
- Chao, W.; Zhu, C.B.; Ge, Y.W.; Zhao, Y.P. A Review on Fault Mechanism and Diagnosis Approach for Li-Ion Batteries. J. Nanomater. 2015, 2015, 1–9. [Google Scholar]
- Zhang, Y.X.; Li, T.Y.; Yan, X.W.; Wang, L.; Zhang, J.; Diao, X.H.; Li, B. Electric Vehicle Charging Fault Monitoring and Warn-ing Method Based on Battery Model. World Electr. Veh. J. 2021, 12, 14. [Google Scholar] [CrossRef]
- Tran, M.K.; Mathew, M.; Janhunen, S.; Panchal, S.; Raahemifar, K.; Fraser, R.; Fowler, M. A comprehensive equivalent circuit model for lithium-ion batteries, incorporating the effects of state of health, state of charge, and temperature on model parameters. J. Energy Storage 2021, 43, 103252. [Google Scholar] [CrossRef]
- Tran, M.K.; DaCosta, A.; Mevawalla, A.; Panchal, S.; Fowler, M. Comparative Study of Equivalent Circuit Models Performance in Four Common Lithium-Ion Batteries: LFP, NMC, LMO, NCA. Batteries 2021, 7, 51. [Google Scholar] [CrossRef]
- Zhang, Y.X.; Li, T.Y.; Zhao, S.S.; Yan, X.W.; Zhang, J.; Diao, X.H.; Li, B. Electric Vehicle Charging Fault Diagnosis Based on BP Neural Network. J. Phys. Conf. Ser. 2020, 1646, 012046. [Google Scholar] [CrossRef]
- Zhang, R.; Li, W.P.; Mo, T. A review of deep learning research. Inf. Control 2018, 47, 385–397. [Google Scholar]
- Wang, T.L.; Pan, Z.F.; Yuan, X.F.; Yang, C.H.; Gui, W.H. A novel deep learning based fault diagnosis approach for chemical process with extended deep belief network. ISA Trans. 2020, 96, 457–467. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.X.; Chen, G.N.; Ren, H.H.; Li, D.D. Fault early warning of fan vulnerable parts based on improved VMD and deep confidence network. J. Vib. Shock 2019, 38, 153–160. [Google Scholar]
- Li, J.Q.; Chen, Y.T.; Li, S.X. Early warning of interturn short circuit fault in excitation winding of synchronous generator based on deep confidence network. Electr. Power Autom. Equip. 2021, 41, 153–158. [Google Scholar]
- Chen, X.M.; Wu, C.X.; Wu, Y.; Xion, N.X.; Han, R. Design and Analysis for Early Warning of Rotor UAV Based on Data-Driven DBN. Electronics 2019, 8, 1350. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Xiang, L.Y. Method for Meteorological Early Warning of Precipitation-Induced Landslides Based on Deep Neural Network. Neural Process. Lett. 2018, 48, 1243–1246. [Google Scholar] [CrossRef]
- Gao, D.X.; Lin, X.H. Fault Diagnosis Method of DC Charging Points for EVs Based on Deep Belief Network. World Electr. Veh. J. 2021, 12, 47. [Google Scholar] [CrossRef]
- Shen, C.Q.; Tang, S.H.; Jiang, X.X.; Shi, J.J.; Wang, J. Application of independent adaptive learning rate optimized deep belief network in bearing fault diagnosis. J. Mech. Eng. 2019, 55, 81–88. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Chen, S. Network security situation prediction method based on NAWL-ILSTM. Comput. Sci. 2019, 46, 161–166. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. Comput. Sci. 2015, 1, 1–15. [Google Scholar]
- Kong, X.Y.; Zheng, F.; Zhijun, E.; Cao, J.; Wang, X. Short-term load forecasting based on deep belief network. Autom. Electr. Power Syst. 2018, 42, 133–139. [Google Scholar]
- Yang, Z.Y.; Liu, J.Y.; Liu, Y.B.; Wen, L.L.; Wang, Z.Q.; Ning, S.C. Substation load forecasting based on adaptive deep belief network. Proc. CSEE 2019, 39, 4049–4061. [Google Scholar]
- Qi, Y.; Gong, Y.D.; Liang, C.Y.; Li, P.F. Research on fault analysis and reliability evaluation techniques of CNC machine tools. J. Northeast. Univ. (Nat. Sci.) 2019, 40, 831–834. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Process Physical Quantities | Unit | Precision | Period/ms |
|---|---|---|---|
| Rated capacity of power battery | Ah | 0.1 | 250 |
| Rated voltage of power battery | V | 0.1 | 250 |
| Maximum allowable individual voltage | V | 0.01 | 500 |
| Maximum allowable charging current | A | 0.1 | 500 |
| Power battery nominal energy | kW·h | 0.1 | 500 |
| Maximum allowable charging voltage | V | 0.1 | 500 |
| Maximum allowable temperature | °C | 1 | 500 |
| Power battery initial state of charge (SOC) | % | 0.1 | 500 |
| Power battery initial voltage | V | 0.1 | 500 |
| Power battery required voltage | V | 0.1 | 50 |
| Power battery required current | A | 0.1 | 50 |
| Charging voltage measurement value | V | 0.1 | 250 |
| Charging current measurement value | A | 0.1 | 250 |
| Maximum individual voltage of power battery | V | 0.01 | 250 |
| Power battery current SOC | % | 1 | 250 |
| Maximum individual temperature of power battery | °C | 1 | 250 |
| Number | Fault Type | Fault Identification Method | Fault Description |
|---|---|---|---|
| 1 | Charging voltage fault | The Pearson coefficient between model prediction and actual measurement is less than 0.8 | Bias fault—charging voltage is higher or lower than the required voltage |
| 2 | Charging current fault | The Pearson coefficient between model prediction and actual measurement is less than 0.8 | Bias fault—charging current is higher or lower than the required current |
| 3 | Temperature fault | The Pearson coefficient between model prediction and actual measurement is less than 0.8 | Bias fault—the measured value of temperature is widely different from the predicted value |
| 4 | SOC fault | The Pearson coefficient between model prediction and actual measurement is less than 0.8 | Bias fault—the measured value of SOC is widely different from the predicted value |
| Description | Symbol | Value |
|---|---|---|
| Maximum number of pre-training iterations | - | 50 |
| Fine-tune the maximum number of iterations | - | 50 |
| Number of pre-trained batch samples | - | 100 |
| Number of fine-tune batch samples | - | 100 |
| Learning rate of pre-training | - | 0.4 |
| Learning rate of fine-tuning | - | 0.001 |
| Exponential decay rate of first-order moments | 0.9 | |
| Exponential decay rate of second order moments | 0.99 | |
| Correction parameters | 10−8 |
| Methods | Model Alert Accuracy (%) | Model Convergence Time (s) |
|---|---|---|
| ADBN1 | 98.61 | 424.16 |
| DBN1 | 94.86 | 481.37 |
| BPNN1 | 89.69 | 13.47 |
| ADBN2 | 97.75 | 416.66 |
| DBN2 | 94.62 | 487.94 |
| BPNN2 | 90.65 | 13.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, D.; Wang, Y.; Zheng, X.; Yang, Q. A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network. World Electr. Veh. J. 2021, 12, 265. https://doi.org/10.3390/wevj12040265
Gao D, Wang Y, Zheng X, Yang Q. A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network. World Electric Vehicle Journal. 2021; 12(4):265. https://doi.org/10.3390/wevj12040265
Chicago/Turabian StyleGao, Dexin, Yi Wang, Xiaoyu Zheng, and Qing Yang. 2021. "A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network" World Electric Vehicle Journal 12, no. 4: 265. https://doi.org/10.3390/wevj12040265
APA StyleGao, D., Wang, Y., Zheng, X., & Yang, Q. (2021). A Fault Warning Method for Electric Vehicle Charging Process Based on Adaptive Deep Belief Network. World Electric Vehicle Journal, 12(4), 265. https://doi.org/10.3390/wevj12040265