
Research on Active Obstacle Avoidance of Intelligent Vehicles Based on Improved Artificial Potential Field Method

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. APF Method
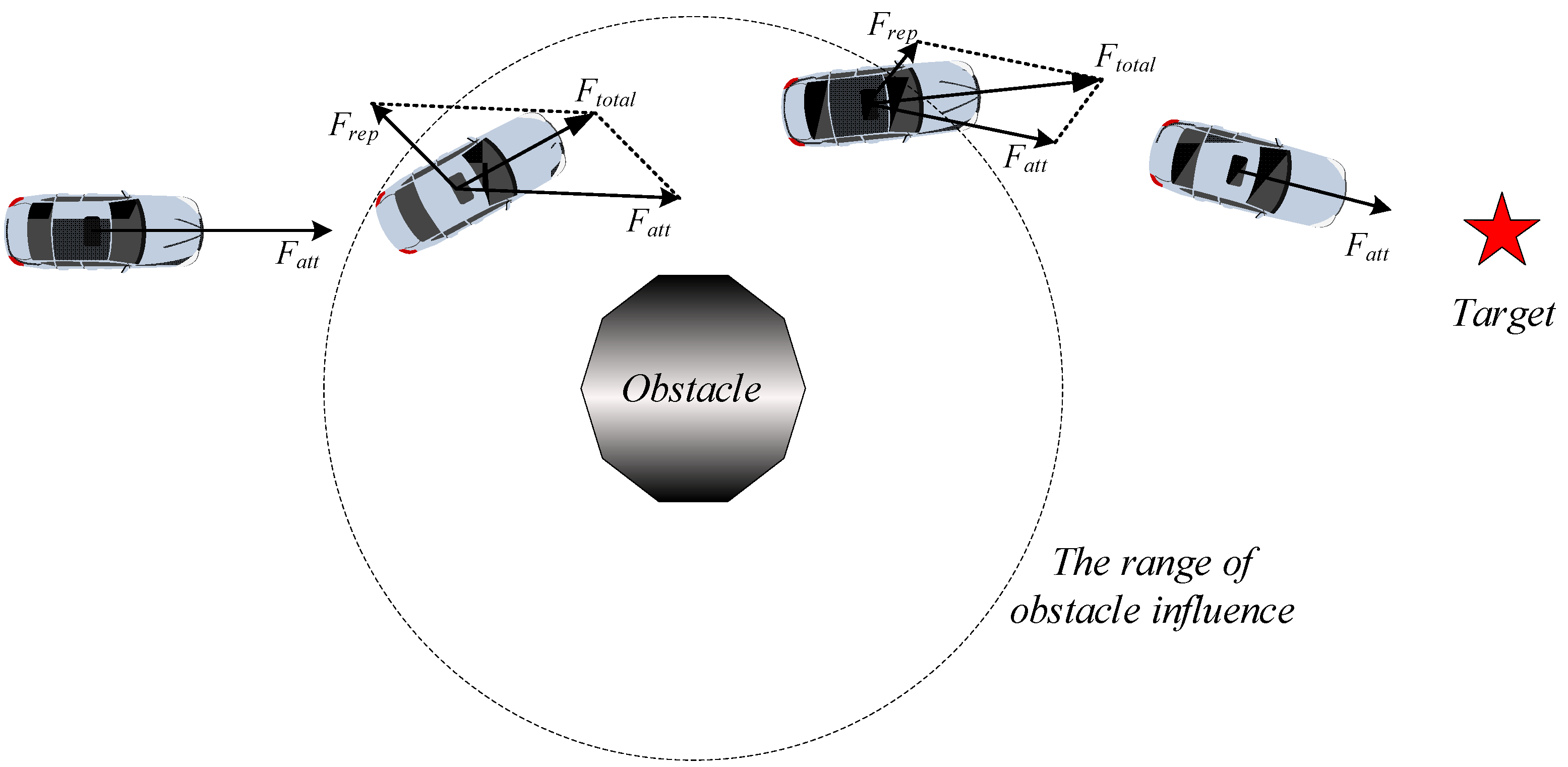
2.1. Traditional APF Method
2.2. Shortcomings of Traditional APF Method
- Because the attractive force is proportional to the distance between vehicle and target, an excessive attractive force will cause the vehicle to hit a nearby obstacle when the vehicle is far from the target.
- The attractive force generated by the target is zero when the vehicle reaches the target. Assuming there is an obstacle near the target, the vehicle will still be repelled away from the target by the repulsive force generated by the obstacle at this time, which causes the vehicle to oscillate near the target and cannot reach it;
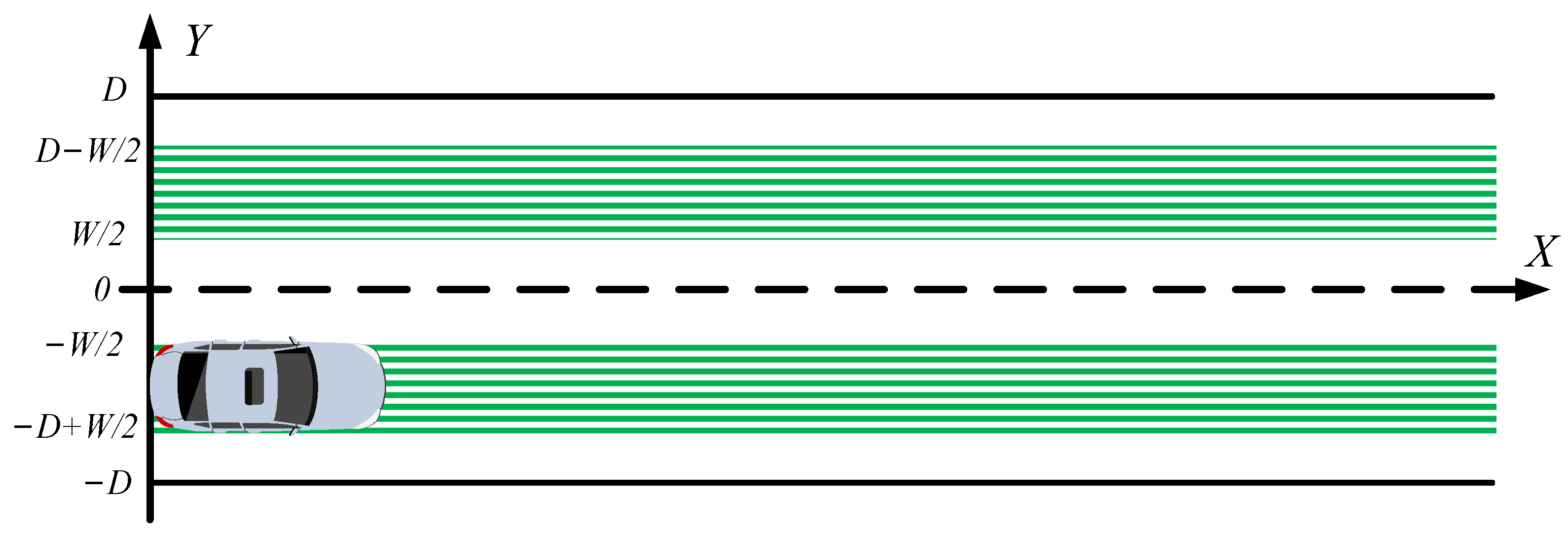
- In practical urban driving scenarios, vehicles must move on a defined road and cannot move outside the road boundaries. Therefore, adding a road boundary potential field to limit the lateral motion of the vehicle is necessary;
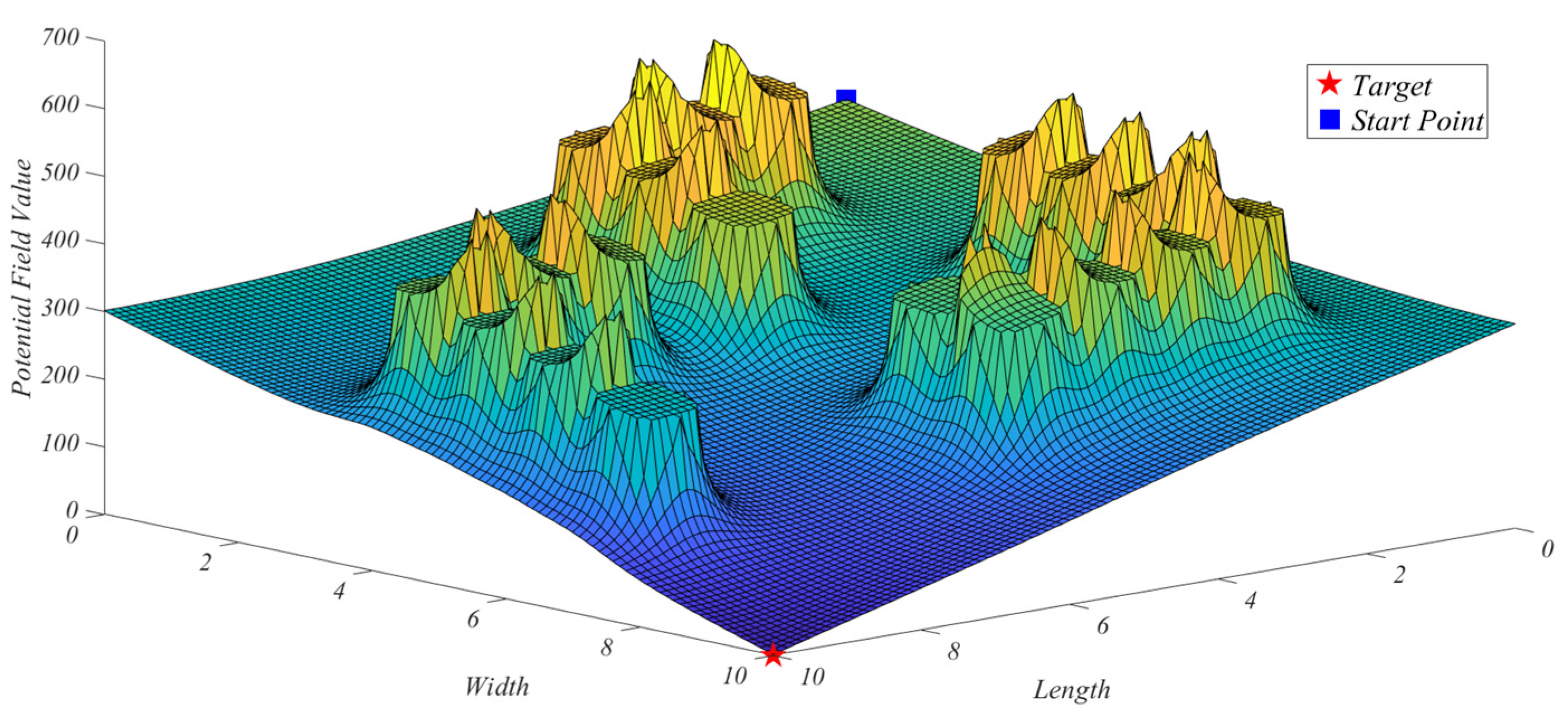
- Assume that the vehicle is at a point where the combined force on the vehicle is zero. The vehicle will fall into a local minima if the vehicle does not reach the target. It is the most common fault of the traditional APF method.
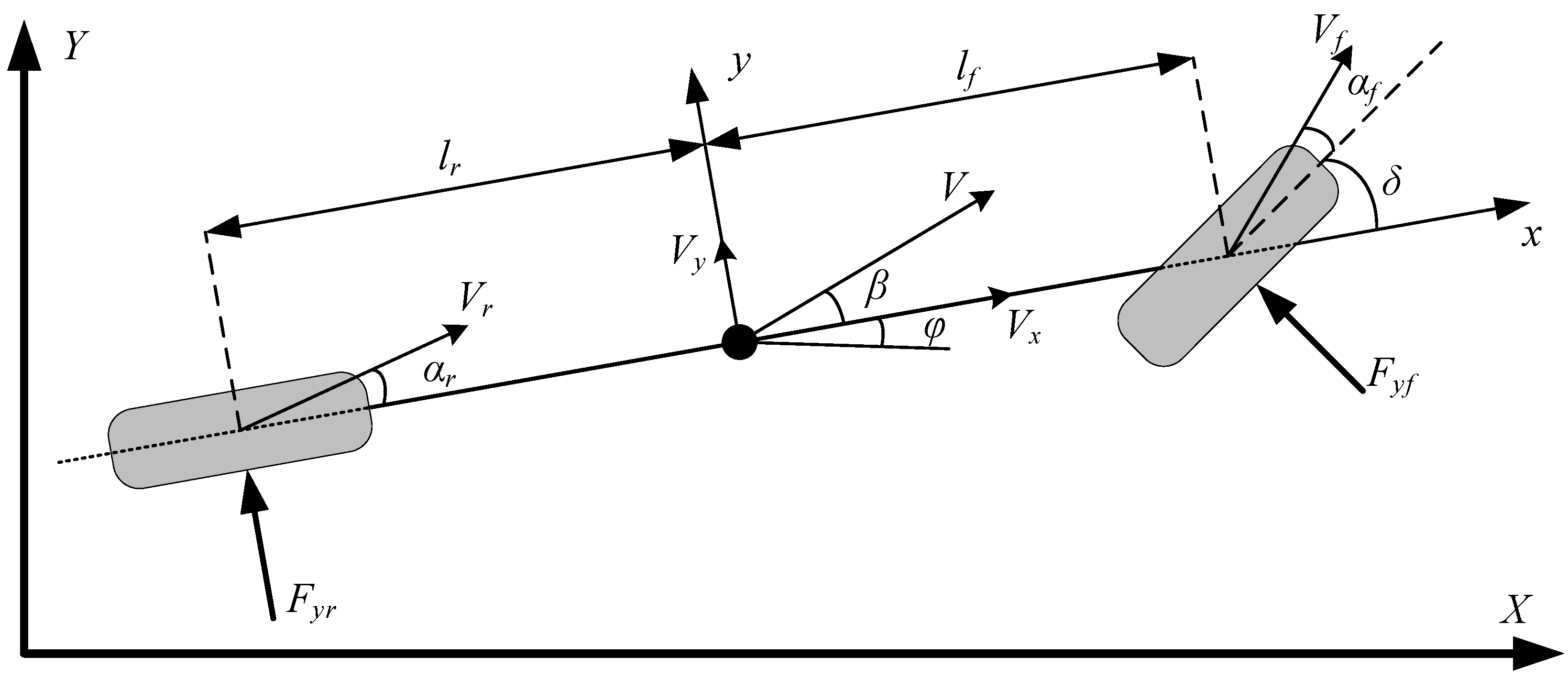
3. Vehicle Dynamics Model
4. Improved APF Method
4.1. Potential Field Functions
4.2. Strategies for Jump out of Local Minima Based on Smaller Steering Angles
5. Simulation and Analysis
5.1. Simulation Environment Construction
5.2. Analysis of Simulation Results
5.2.1. Simulation Analysis of Local Minima Problems
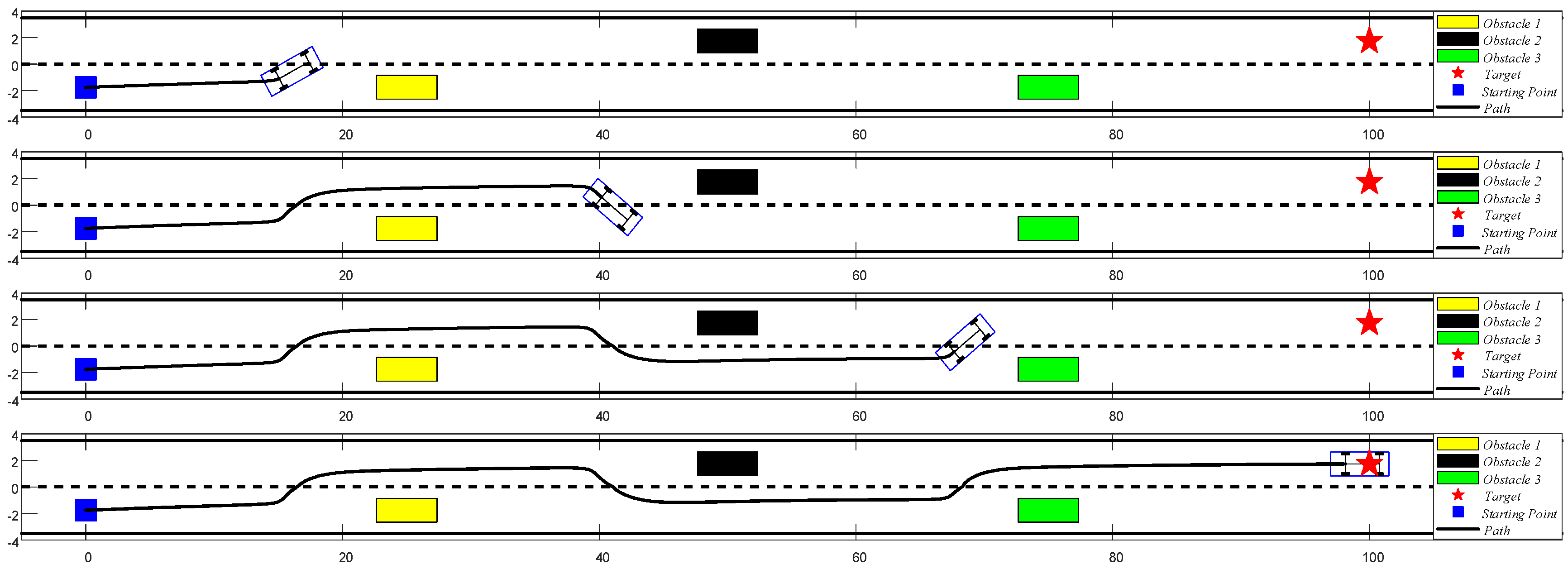
5.2.2. Simulation of Path Planning in Static Obstacles Situations
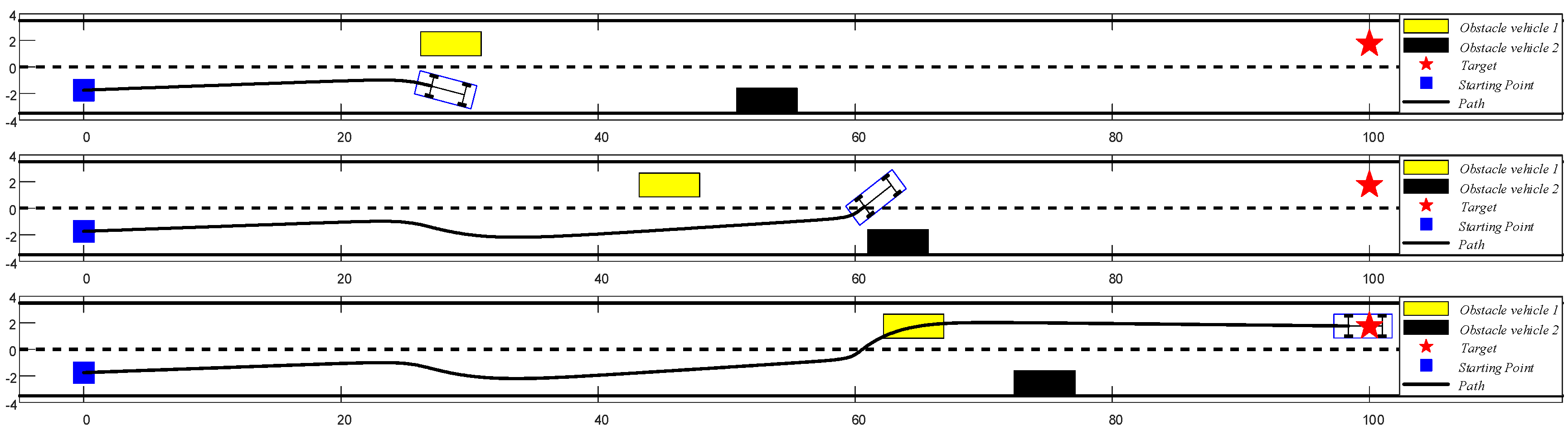
5.2.3. Simulation of Path Planning in Dynamic Obstacle Situation
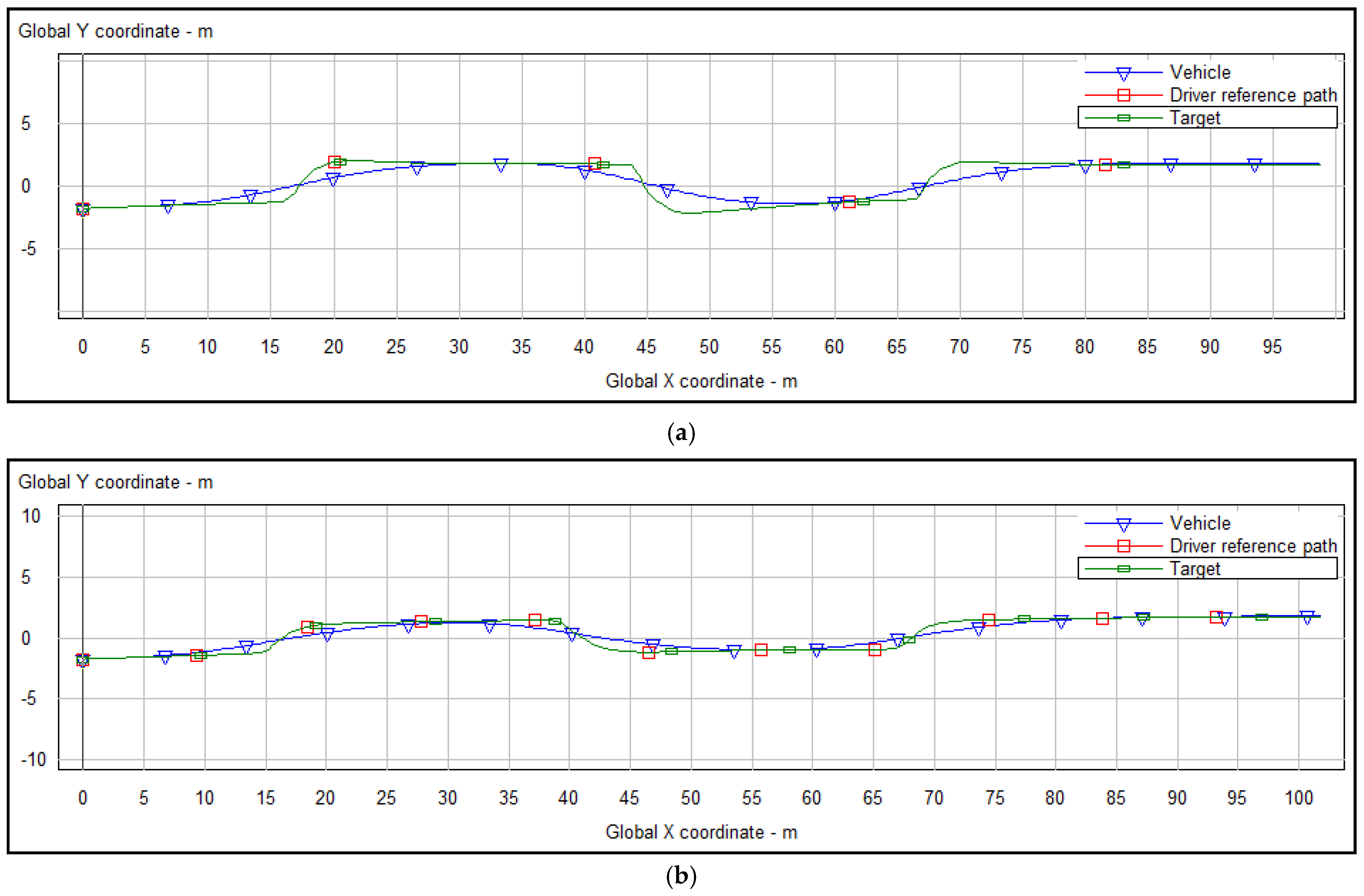
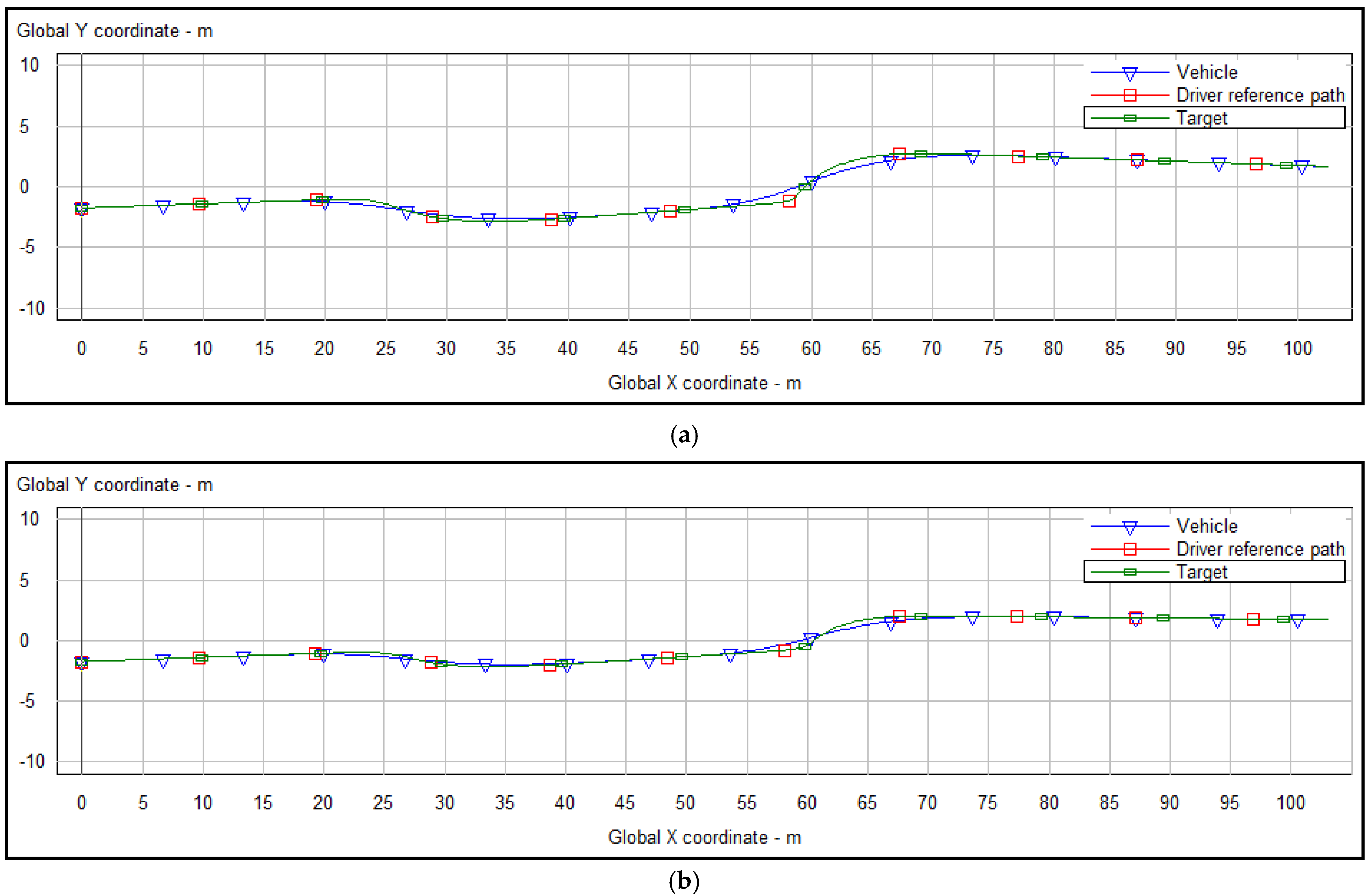
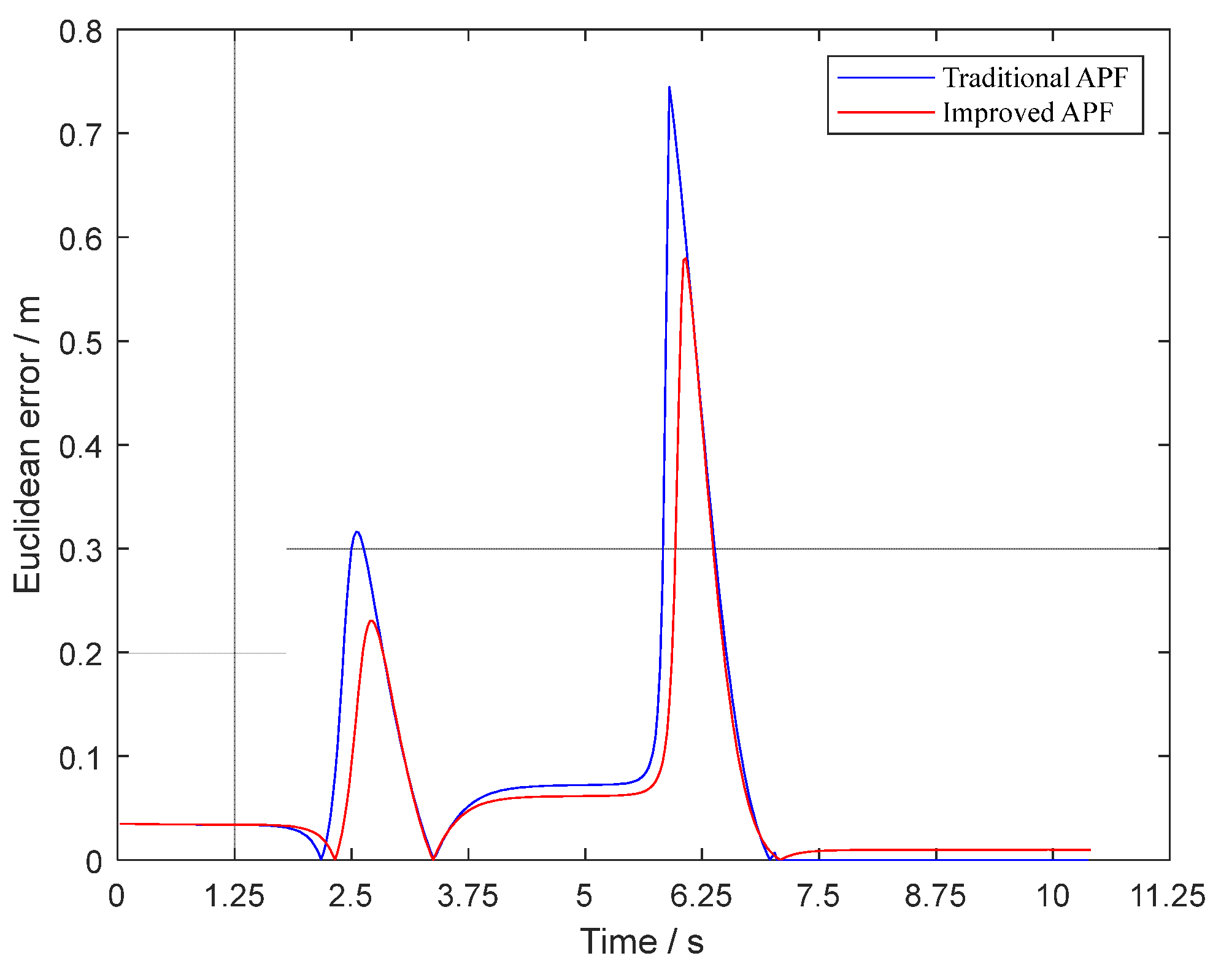
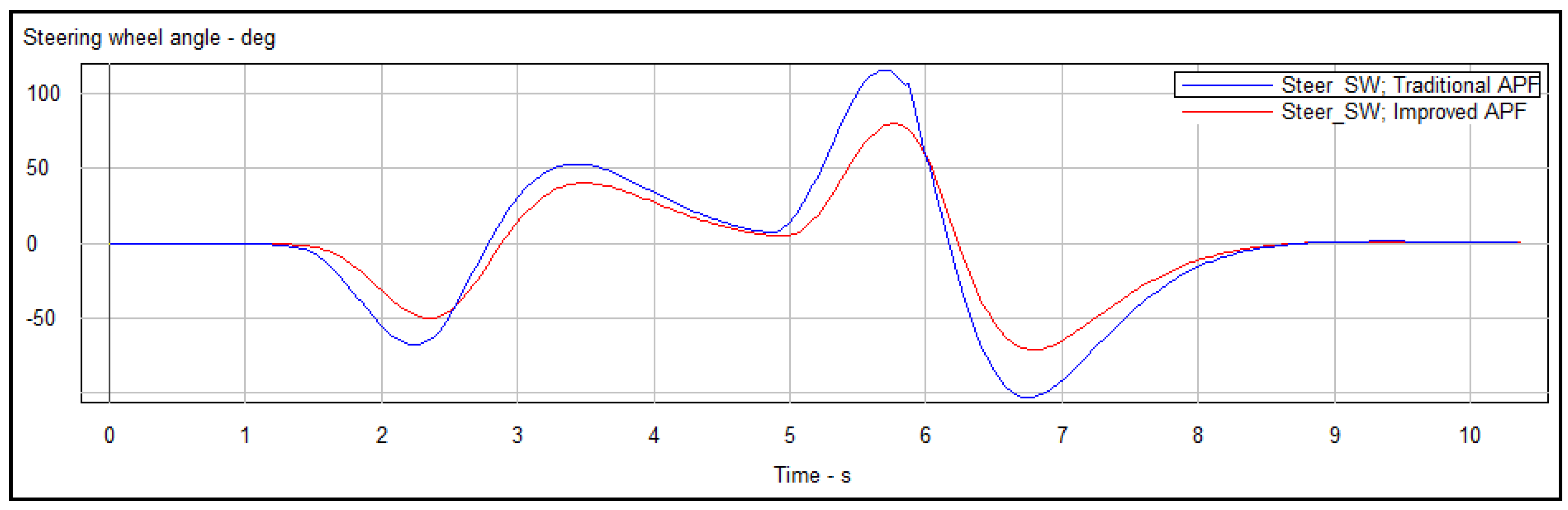
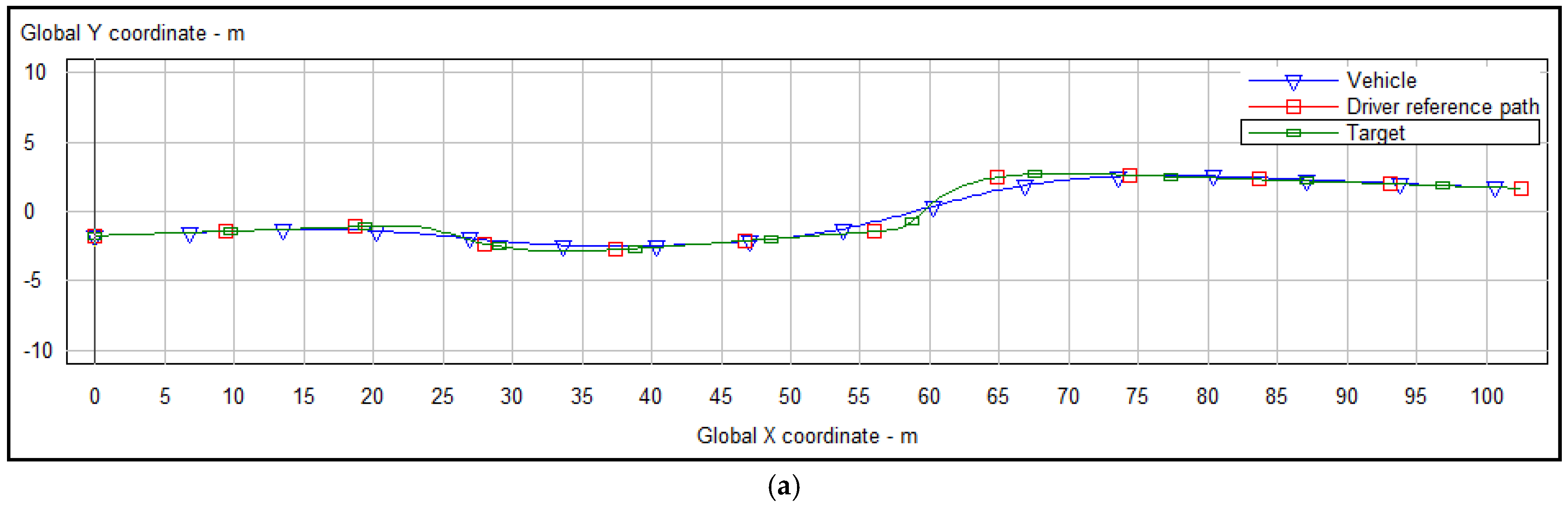
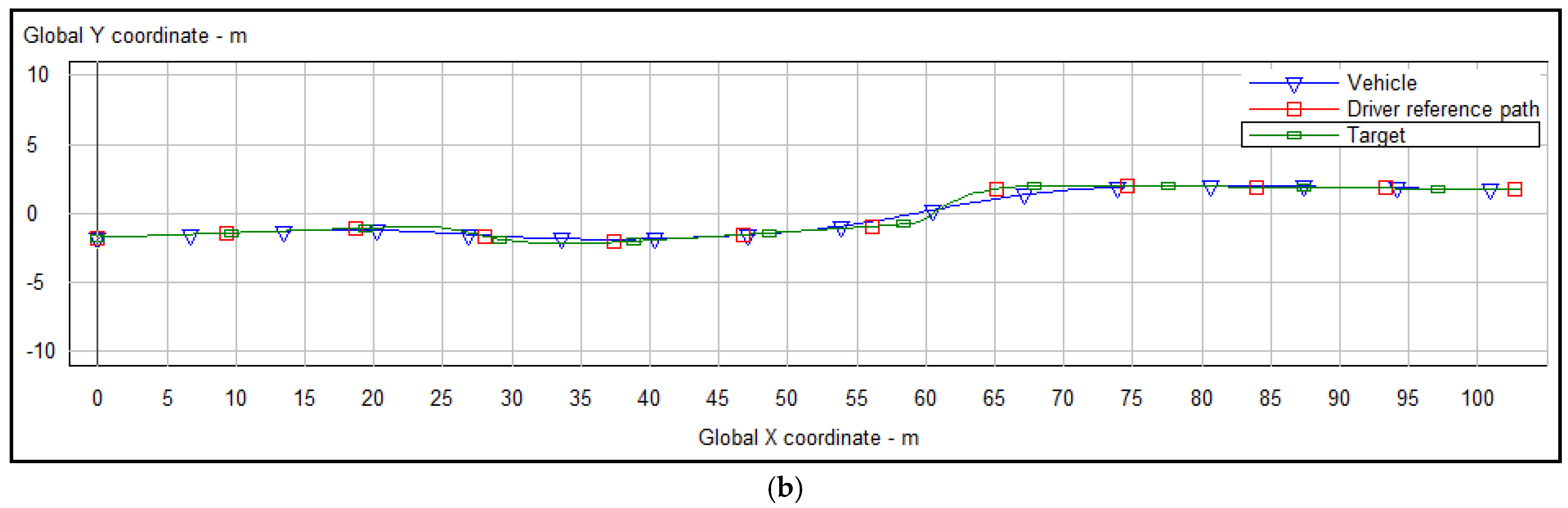
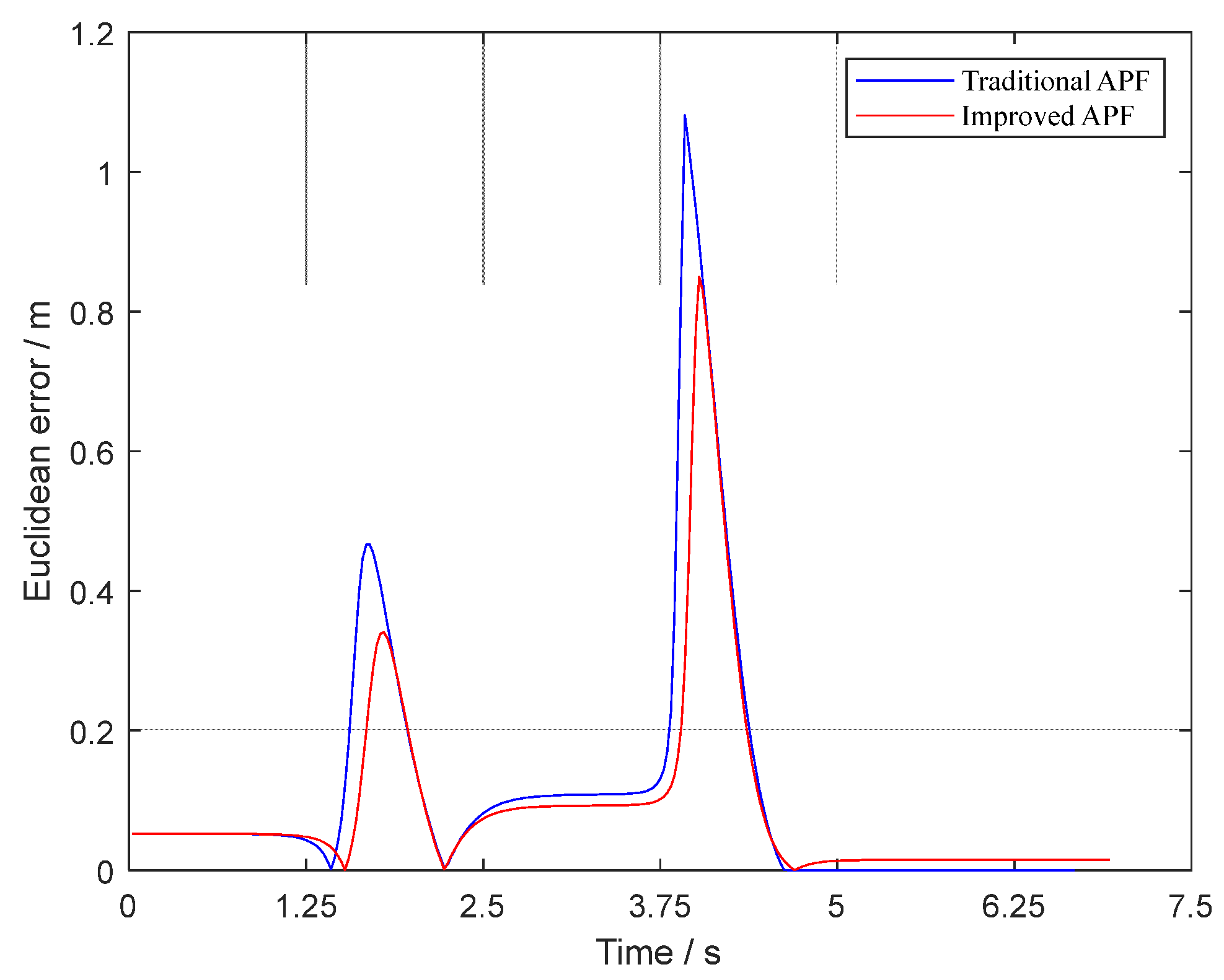
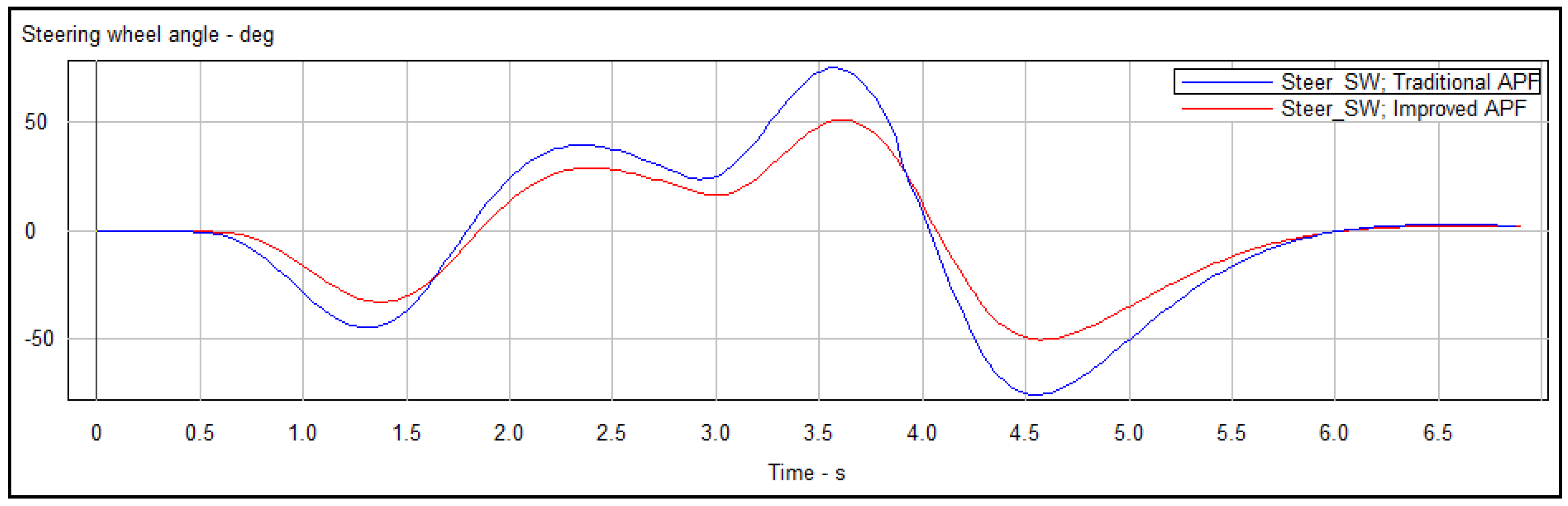
5.3. Simulation of Tracking the Planned Trajectory
6. Conclusions
- (1)
- This paper introduces the principle of the traditional APF method and its advantages and shortcomings, solving the problem of excessive initial attractive force and intelligent vehicle cannot reach the target by improving the potential field functions. At the same time, establishing the road boundary potential field combined with the actual application scenario.
- (2)
- A strategy of jump out of local minima based on smaller steering angles has been proposed, solving the problem of local minima that the traditional APF method tends to fall into by finding smaller steering angles and determining the appropriate jump out step length in the steering angle range of the vehicle.
- (3)
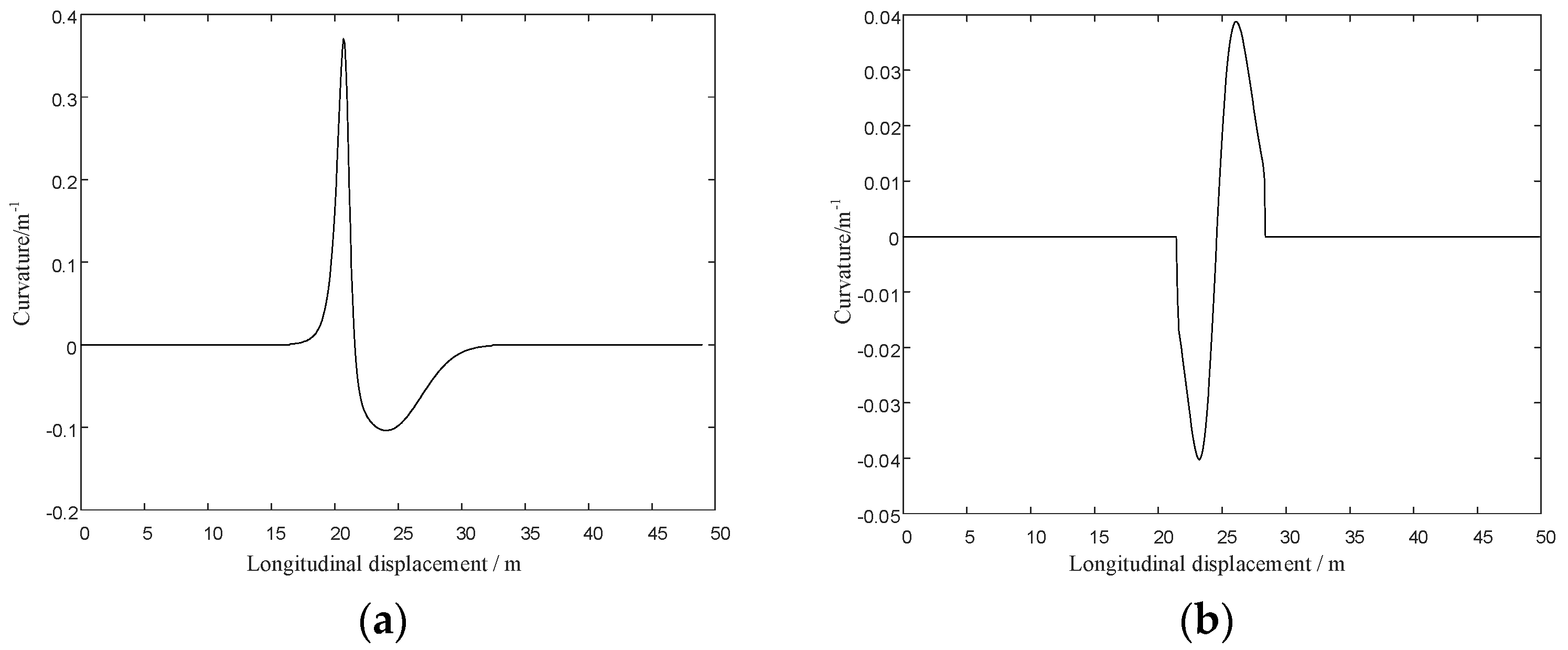
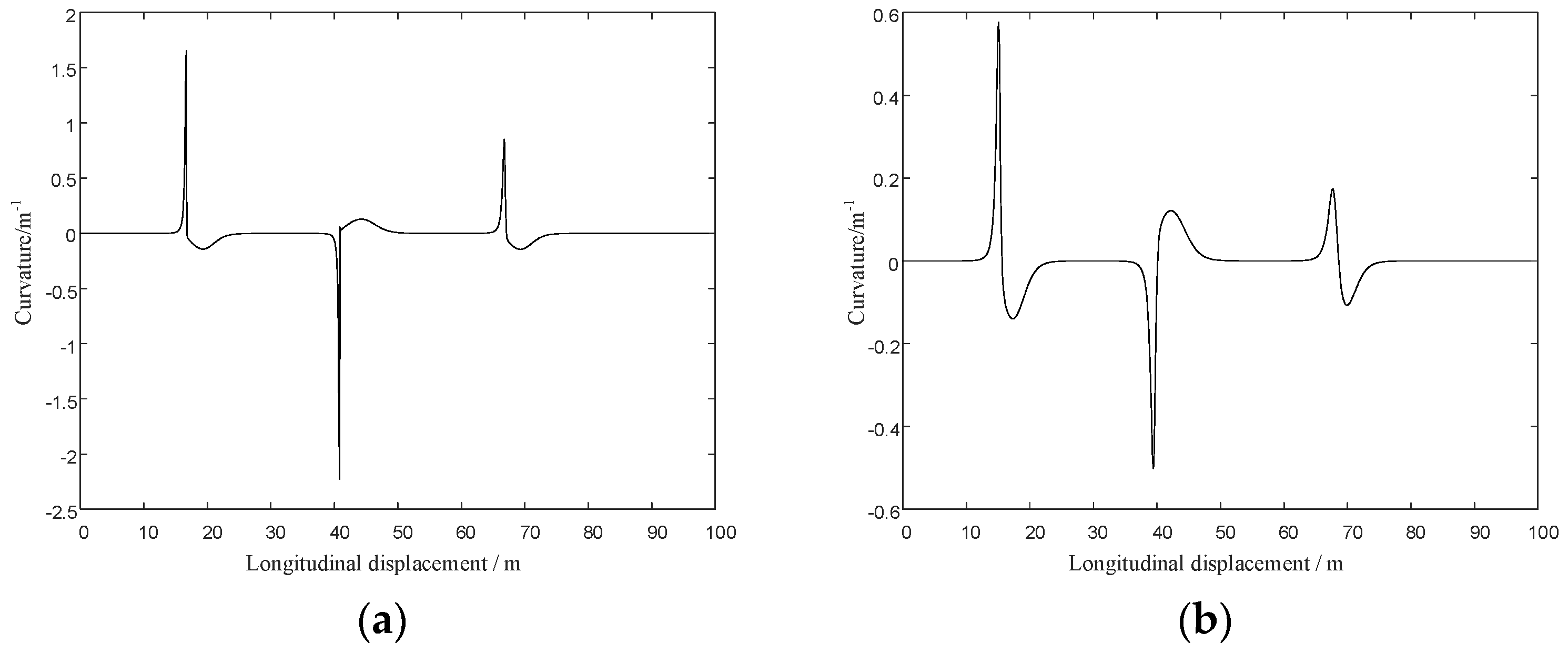
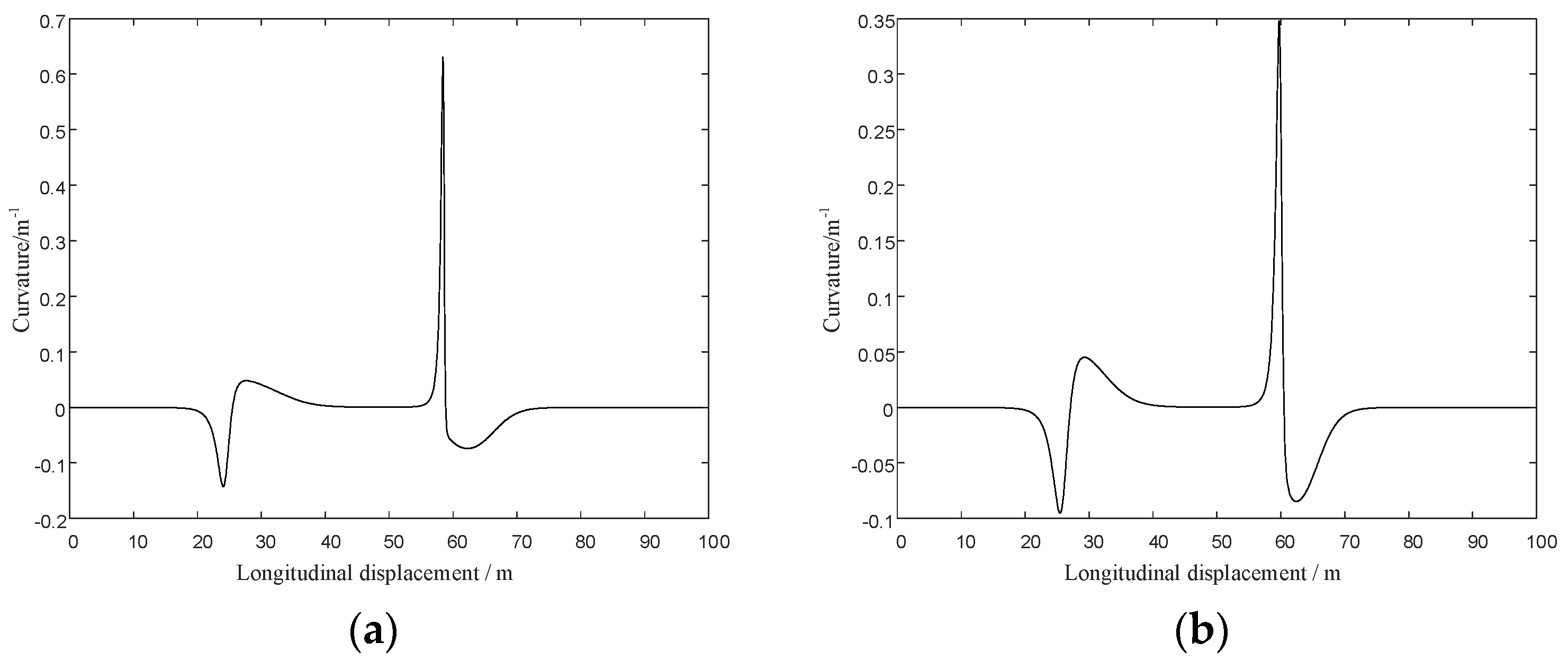
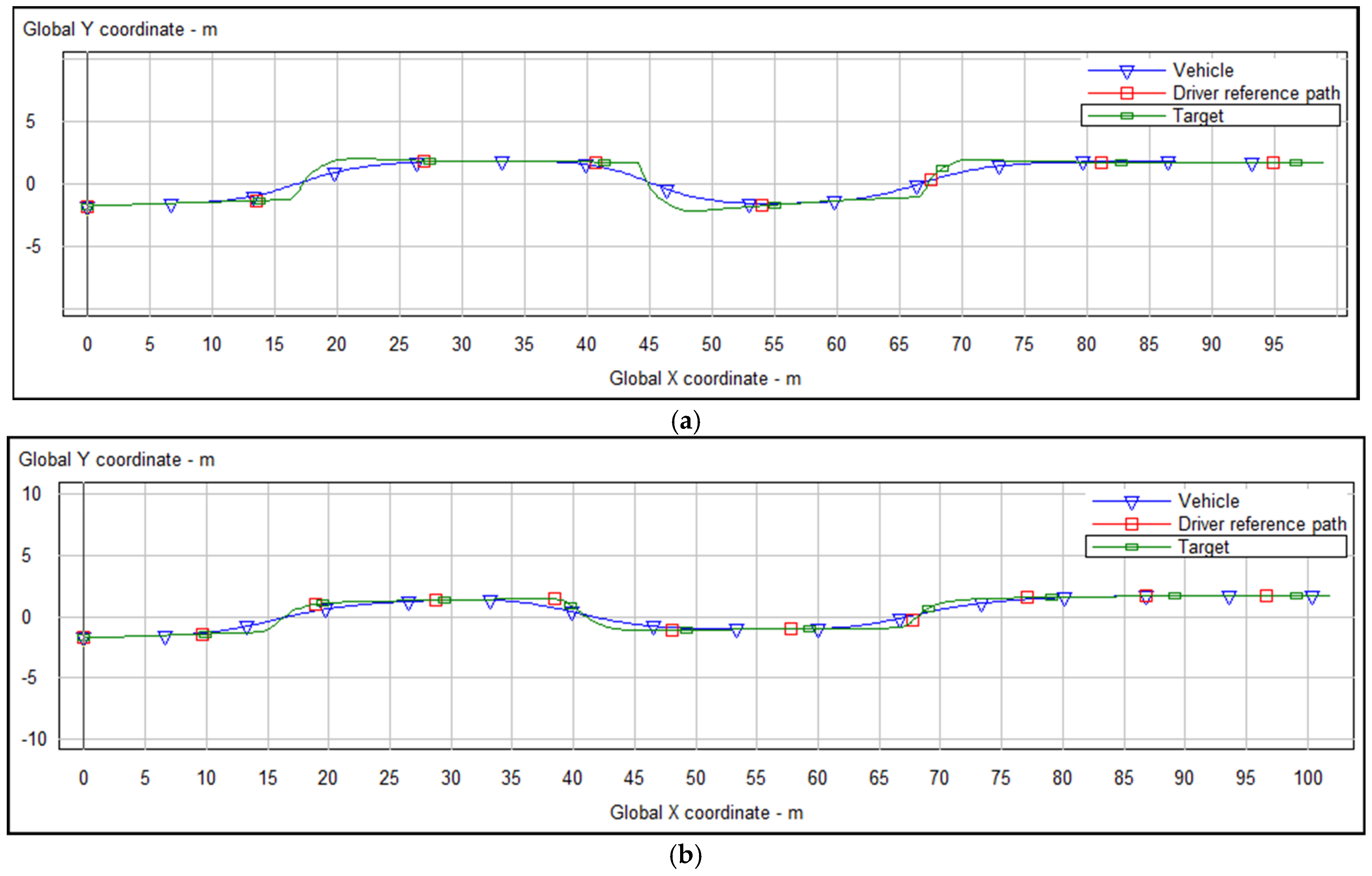
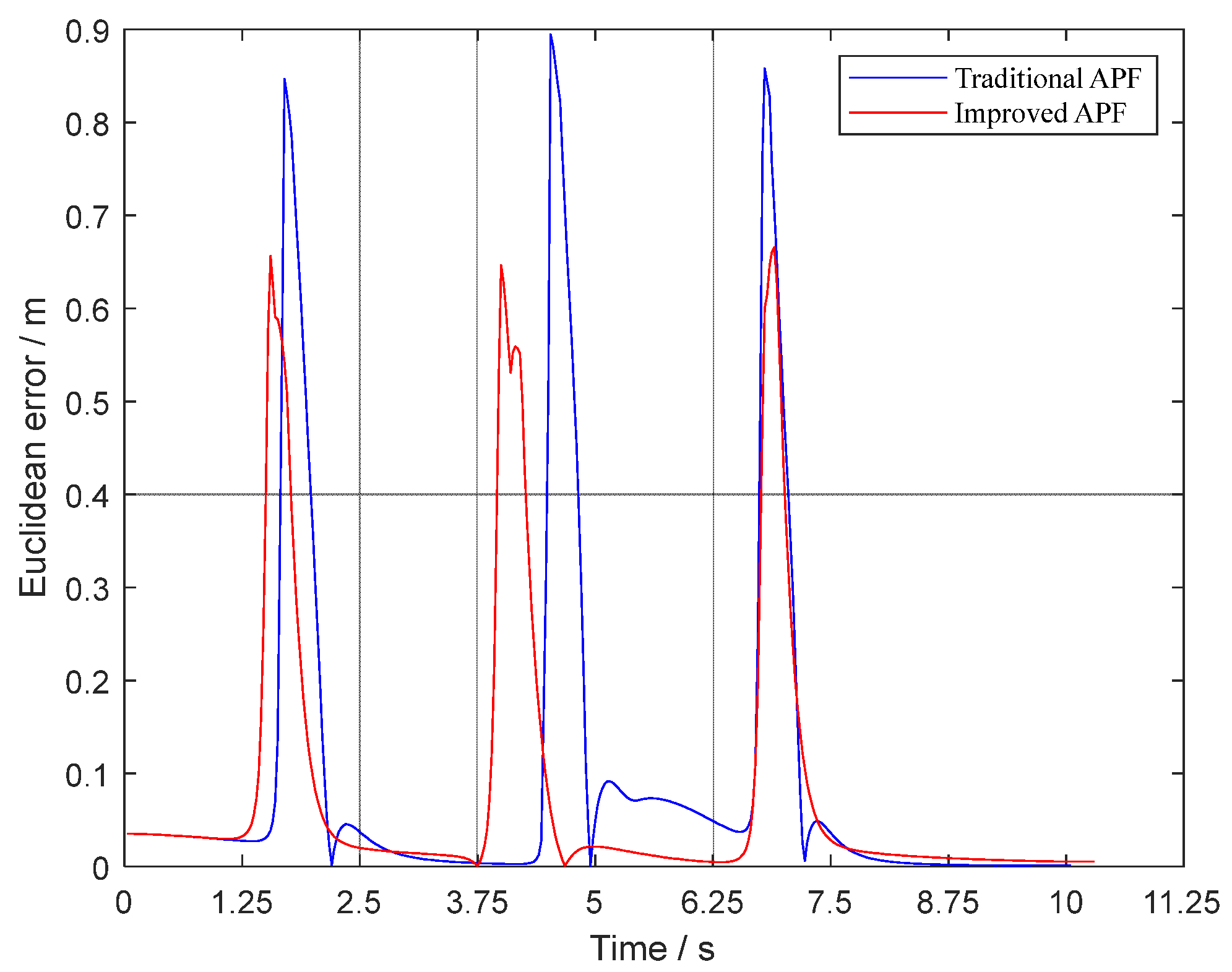
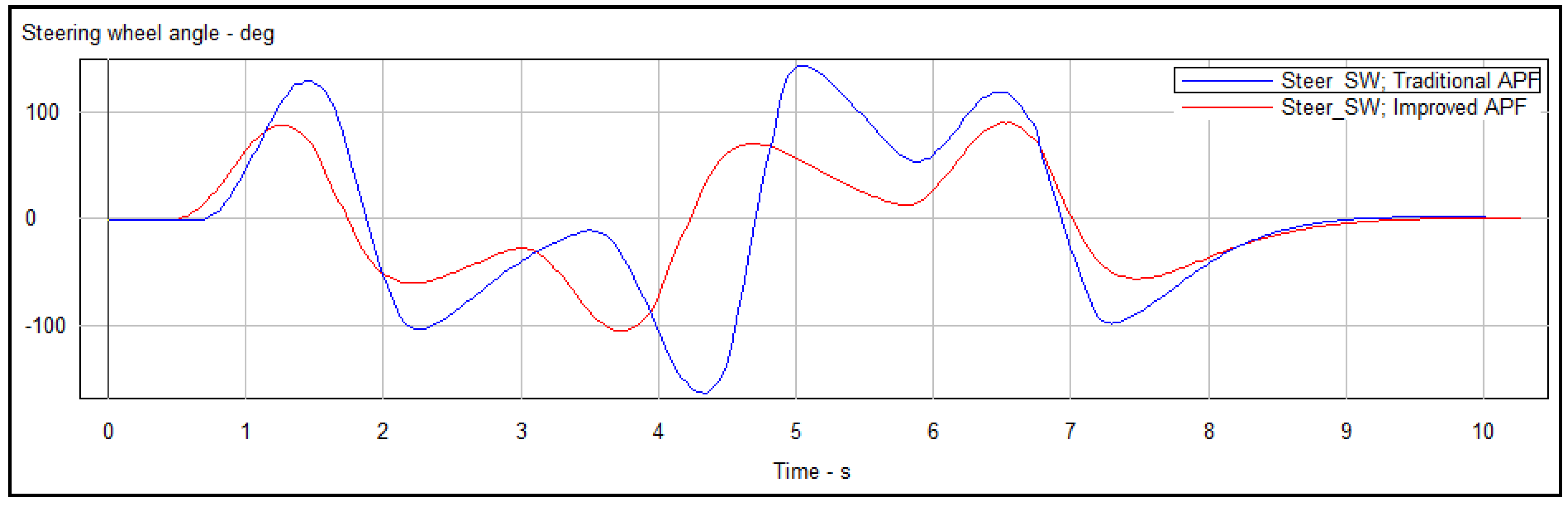
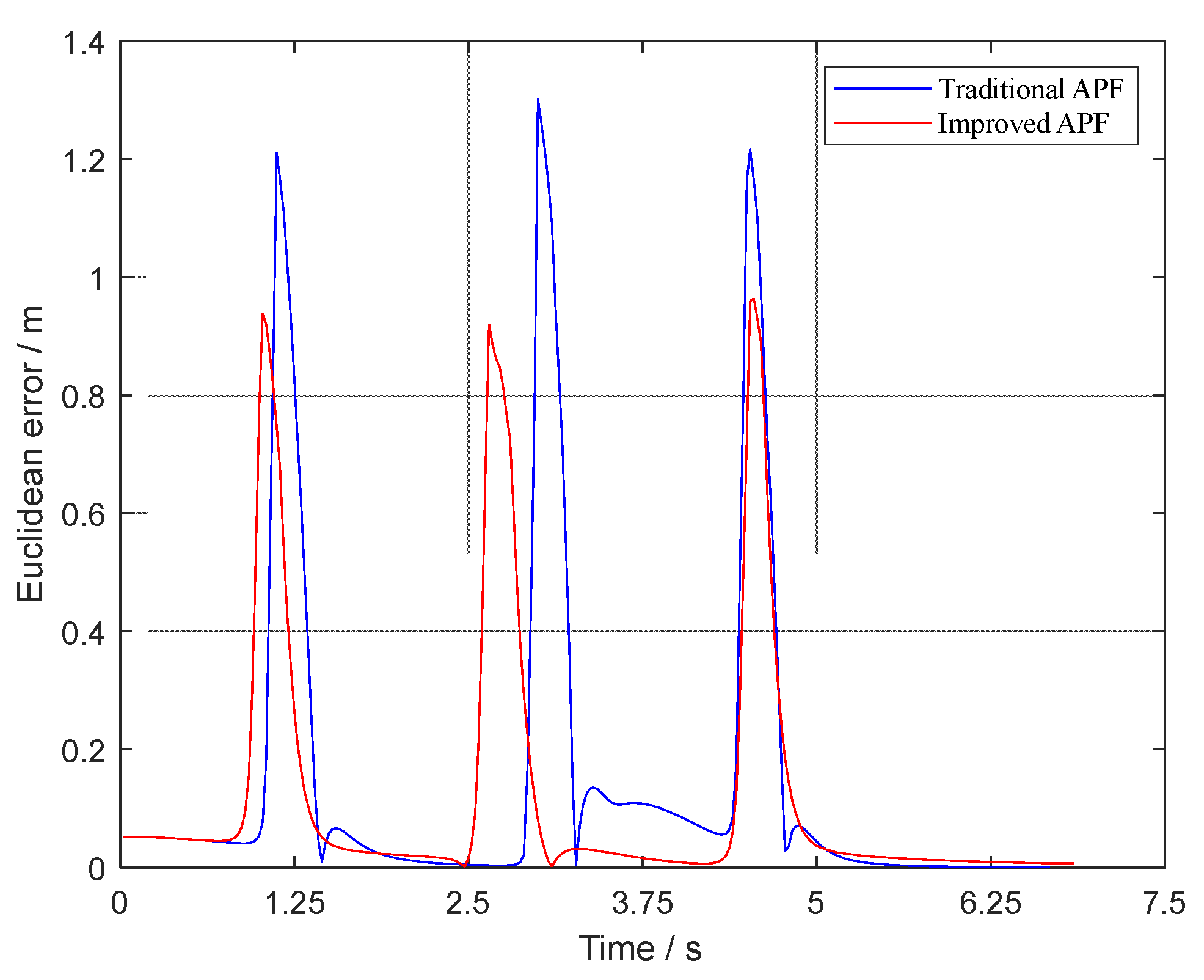
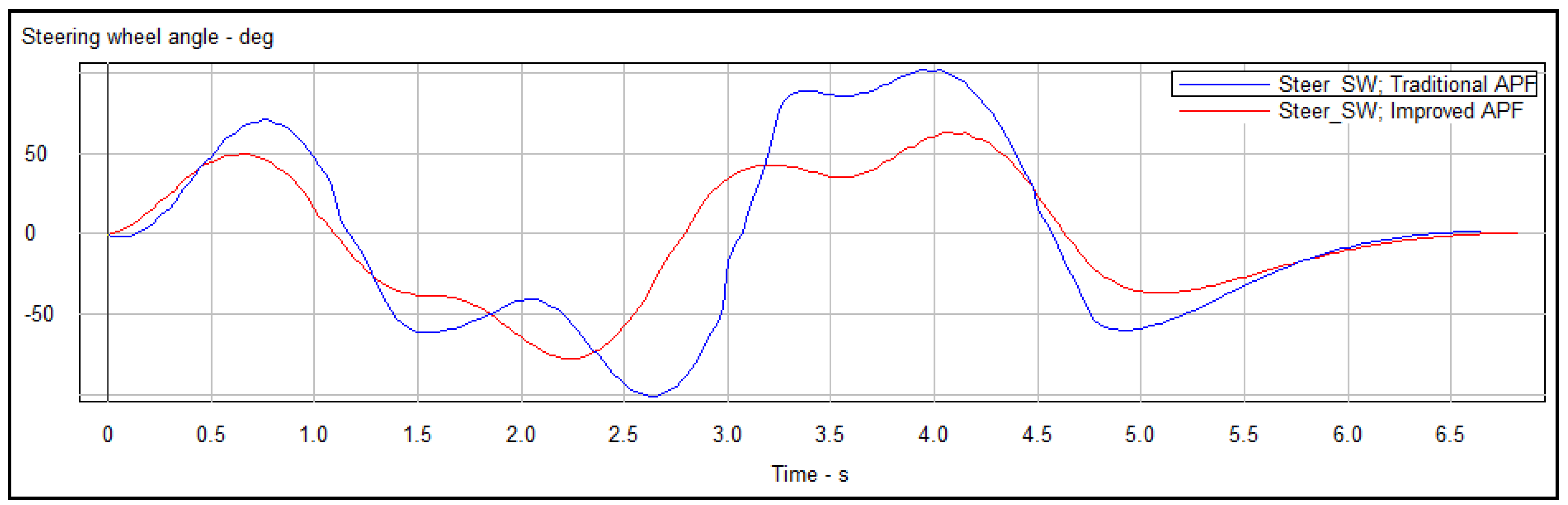
- The improved APF method can not only jump out local minima but also plan smooth trajectories by simulation in Matlab. By comparing the magnitude of curvature and tracking the planned trajectories in Carsim platform, the reduction of Euclidean error and steering wheel angle proved that the trajectories planned by the improved APF method are easier to be tracked.
- The driving environment designed in this paper is urban road and the general vehicle speed limit range is 30–60 km/h in the city. 10 m/s (36 km/h) and 15 m/s (54 km/h) are the common speeds in the speed limit range, so they are used as the simulation speed in this paper. Furthermore, obstacle avoidance of high-speed vehicles is a complex motion planning involving braking and steering. If the speed of the vehicle is too high, the actual trajectory will have a large deviation from the planned trajectory due to the inertia of the vehicle, which may directly cause the vehicle to have a lateral collision with the obstacle and lead to the failure of the path planning. In this paper, under the assumption of uniform vehicle motion, the vehicle trajectory planning under high-speed motion is not considered.
- The APF model in this paper does not consider the differences of obstacle avoidance trajectories of different vehicle types in the actual road environment, and only considers the obstacle avoidance scenarios of flat and straight roads, which is a relatively single scene.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Xu, K.; Zheng, C.; Feng, W.; Xu, G. Advanced research on information perception technologies of intelligent electric vehicles. Chin. J. Sci. Instrum. 2017, 38, 794–805. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; pp. 64–76. [Google Scholar]
- Bao, Q.; Li, S.; Shen, Z.; Men, X. Survey of local path planning of autonomous mobile robot. Transducer Microsyst. Technol. 2009, 28, 1–4. [Google Scholar]
- Ma, R.; Guan, Z. Summarization for Present Situation and Future Development of Path Planning Technology. Mod. Mach. 2008, 3, 22–24. [Google Scholar]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. [Google Scholar] [CrossRef]
- Yu, H.; Li, X. Fast Path Planning Based on Grid Model of Robot. Microelectron. Comput. 2005, 6, 98–100. [Google Scholar]
- Ouyang, X.; Yang, S. Obstacle Avoidance Path Planning of Mobile Robots Based on Potential Grid Method. Control Eng. China 2014, 21, 134–137. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Wang, D. Indoor mobile-robot path planning based on an improved A*algorithm. J. Tsinghua Univ. (Sci. Technol.) 2012, 52, 1085–1089. [Google Scholar]
- Zhao, X.; Wang, Z.; Huang, C.; Zhao, Y. Mobile Robot Path Planning Based on an Improved A* Algorithm. Robot 2018, 40, 903–910. [Google Scholar]
- Chen, Q.; Jiang, H.; Zheng, Y. Summary of Rapidly-Exploring Random Tree Algorithm in Robot Path Planning. Comput. Eng. Appl. 2019, 55, 10–17. [Google Scholar]
- Lindqvist, B.; Agha-Mohammadi, A.A.; Nikolakopoulos, G. Exploration-rrt: A multi-objective path planning and exploration framework for unknown and unstructured environments. arXiv 2021, arXiv:2104.03724. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J., Jr. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Vega-Brown, W.; Roy, N. Asymptotically optimal planning under piecewise-analytic constraints. In Algorithmic Foundations of Robotics XII; Springer: Berlin/Heidelberg, Germany, 2020; pp. 528–543. [Google Scholar]
- Nakrani, N.M.; Joshi, M.M. A human-like decision intelligence for obstacle avoidance in autonomous vehicle parking. Appl. Intell. 2022, 52, 3728–3747. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, J.; Wang, Y.; Pan, Q.; Tan, J.; Mao, J. Autonomous mobile robot path planning in unknown dynamic environments using neural dynamics. Soft Comput. 2020, 1420, 289–299. [Google Scholar] [CrossRef]
- Jafari, M.; Xu, H.; Carrillo, L.R.G. Brain emotional learning-based path planning and intelligent control co-design for unmanned aerial vehicle in presence of system uncertainties and dynamic environment. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018; pp. 1435–1440. [Google Scholar]
- Li, L.; Gan, J.; Qu, X.; Mao, P.; Ran, B. Car-following Model Based on Safety Potential Field Theory Under Connected and Automated Vehicle Environment. China J. Highw. Transp. 2019, 32, 76–87. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1986; pp. 396–404. [Google Scholar]
- Choe, T.S.; Jin, W.H.; Chae, J.S.; Park, Y.W. Real-time collision avoidance method for unmanned ground vehicle. In Proceedings of the International Conference on Control, Honolulu, HI, USA, 8–11 July 2008. [Google Scholar]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A motion planning and tracking framework for autonomous vehicles based on artificial potential field-elaborated resistance network (apfe-rn) approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, H. Research on Local Path Planning of Vehicles Active Obstacle Avoidance Based on Improved Artificial Potential Field Method. J. Qingdao Univ. (Eng. Technol. Ed.) 2022, 37, 50–57. [Google Scholar]
- Li, E.; Wang, Y. Research on Obstacle Avoidance Trajectory of Mobile Robot Based on lmproved Artificial Potential Field. Comput. Eng. Appl. 2022, 58, 296–304. [Google Scholar]
- Bounini, F.; Gingras, D.; Pollart, H.; Gruyer, D. Modified Artificial Potential Field Method for Online Path Planning Applications. In Proceedings of the Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Cummings, M.L.M.; Marquez, J.J.; Roy, N.G.D. Human-automated path planning optimization and decision support. Int. J. Hum.-Comput. Stud. 2012, 70, 116–128. [Google Scholar] [CrossRef]
- Luo, D.; Wu, S. Ant colony optimization with potential field heuristic for robot path planning. Syst. Eng. Electron. 2010, 32, 1277–1280. [Google Scholar]
- Cheng, Z. Robot Path Planning Based on Artificial Potential Field Method. Master Thesis, Yanshan University, Hebei, China, 2016. [Google Scholar]
- Zhu, W. Research on Path Planning and Obstacle Avoidance Method for Vehicle Based on Improved Artificial Potential Field. Master’s Thesis, Jiangsu University, Jiangsu, China, 2017. [Google Scholar]
- Osman, K.; Ghommam, J.; Mehrjerdi, H.; Saad, M. Vision-based curved lane keeping control for intelligent vehicle highway system. Proceedings of the Institution of Mechanical Engineers Part I. J. Syst. Control Eng. 2018, 233, 961–979. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name and Symbol Representation | Value/Unit |
|---|---|
| Attractive field action coefficient | 15 |
| Repulsive field action coefficient | 10 |
| Road boundary potential field coefficient | 20 |
| Radius of the influence range of the obstacle | 5 m |
| Vehicle length | 4.7 m |
| Vehicle width | 1.8 m |
| Lane width | 3.5 m |
| Step length | 0.1 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, J.; Bei, S.; Li, B.; Hu, H.; Quan, Z.; Zhou, D.; Zhou, X.; Tang, H. Research on Active Obstacle Avoidance of Intelligent Vehicles Based on Improved Artificial Potential Field Method. World Electr. Veh. J. 2022, 13, 97. https://doi.org/10.3390/wevj13060097
Tian J, Bei S, Li B, Hu H, Quan Z, Zhou D, Zhou X, Tang H. Research on Active Obstacle Avoidance of Intelligent Vehicles Based on Improved Artificial Potential Field Method. World Electric Vehicle Journal. 2022; 13(6):97. https://doi.org/10.3390/wevj13060097
Chicago/Turabian StyleTian, Jing, Shaoyi Bei, Bo Li, Hongzhen Hu, Zhenqiang Quan, Dan Zhou, Xinye Zhou, and Haoran Tang. 2022. "Research on Active Obstacle Avoidance of Intelligent Vehicles Based on Improved Artificial Potential Field Method" World Electric Vehicle Journal 13, no. 6: 97. https://doi.org/10.3390/wevj13060097
APA StyleTian, J., Bei, S., Li, B., Hu, H., Quan, Z., Zhou, D., Zhou, X., & Tang, H. (2022). Research on Active Obstacle Avoidance of Intelligent Vehicles Based on Improved Artificial Potential Field Method. World Electric Vehicle Journal, 13(6), 97. https://doi.org/10.3390/wevj13060097