

Optimization of the Electronic Control Unit of Electric-Powered Agricultural Vehicles

 ,
,  , and
, and
Abstract
:1. Introduction
- Pulling or pushing agricultural machinery or trailers;
- Plowing, tilling, and discing;
- Harrowing;
- Planting;
- Other similar tasks.
- They have reduced emissions;
- They are powered by electricity, rather than diesel which means lower fuel costs;
- They are also less noisy than diesel tractors, reducing noise pollution;
- They come with advanced technologies such as autonomous driving;
- Power management can be performed easily resulting in higher efficiency;
- They can use renewable energy sources for battery charging;
- There is no need for a complicated gear-box;
- ABS and ASR control is easier to implement compared to a mechanical clutch.
- Higher initial cost compared to diesel tractor;
- Limited by their battery capacity, which can pose a problem for large fields;
- Access to an electrical grid is required;
- Lack of technological maturity which can lead to a lack the reliability when compared to traditional diesel tractors.
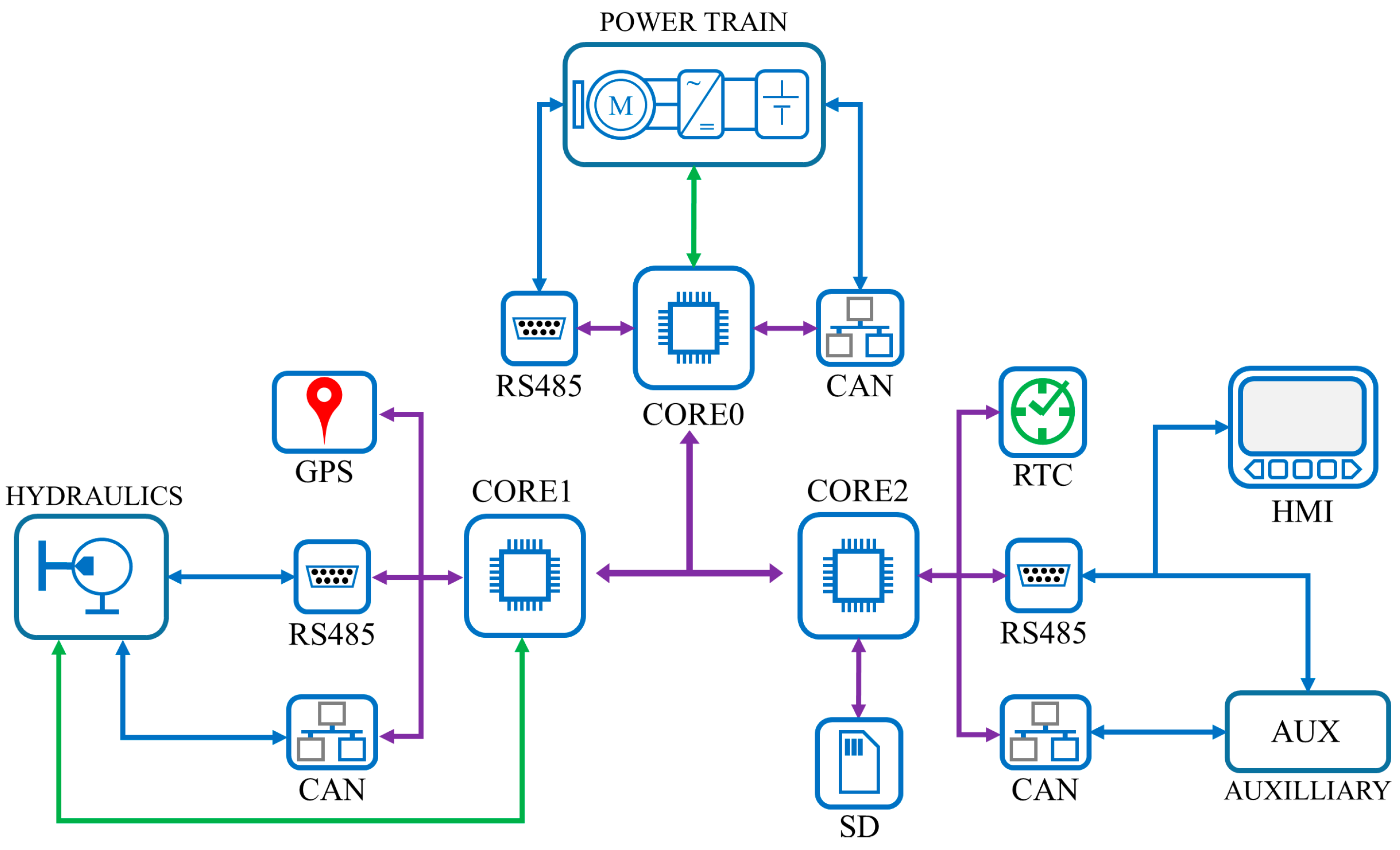
2. Materials and Methods
- Power train—composed of the battery or fuel cell, the power converter, the electric motor, and the battery management system (BMS);
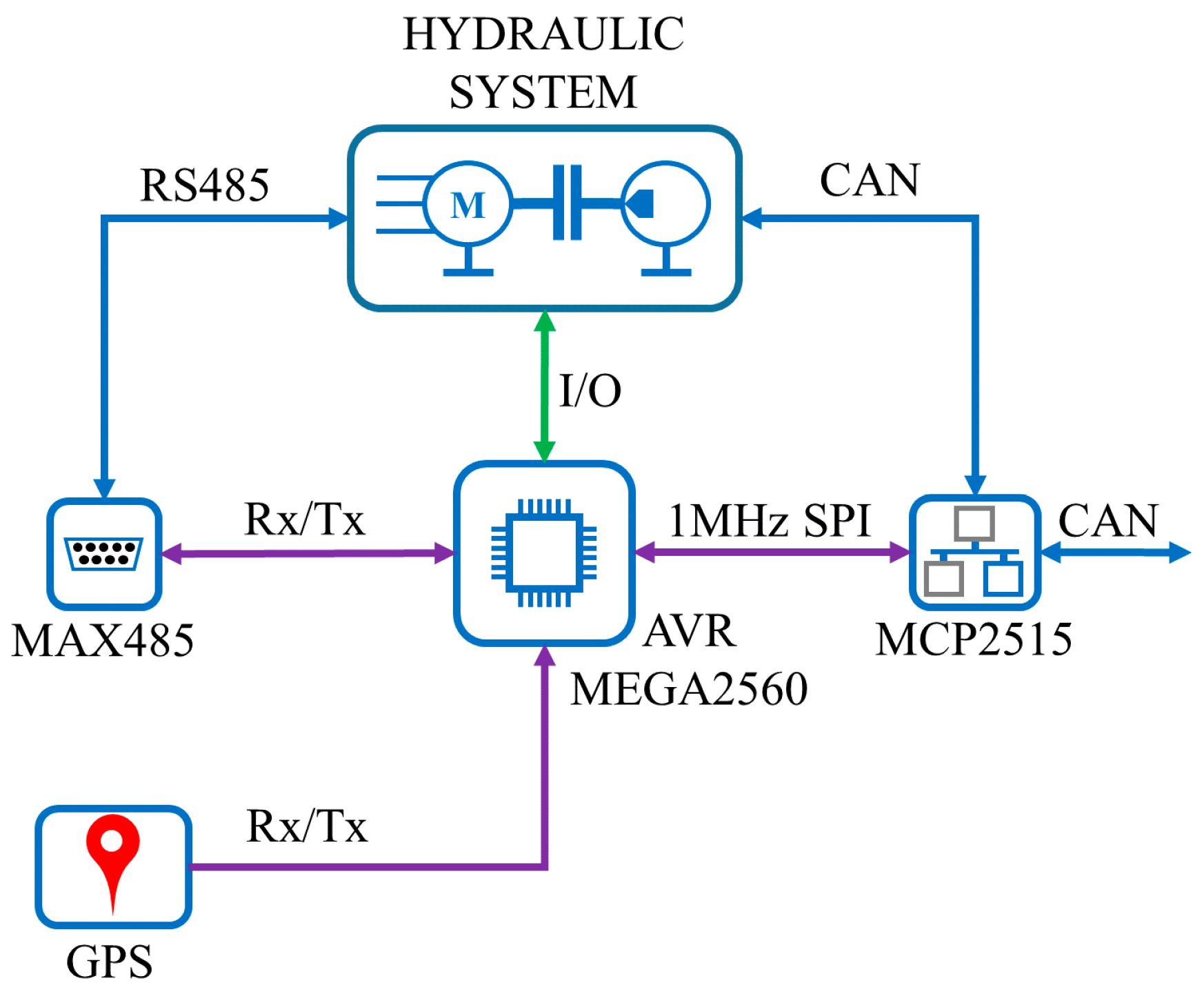
- Hydraulic system—composed of the hydraulic pump, control valves, hydraulic actuators, proportional valves, oil tank, and cooling system;
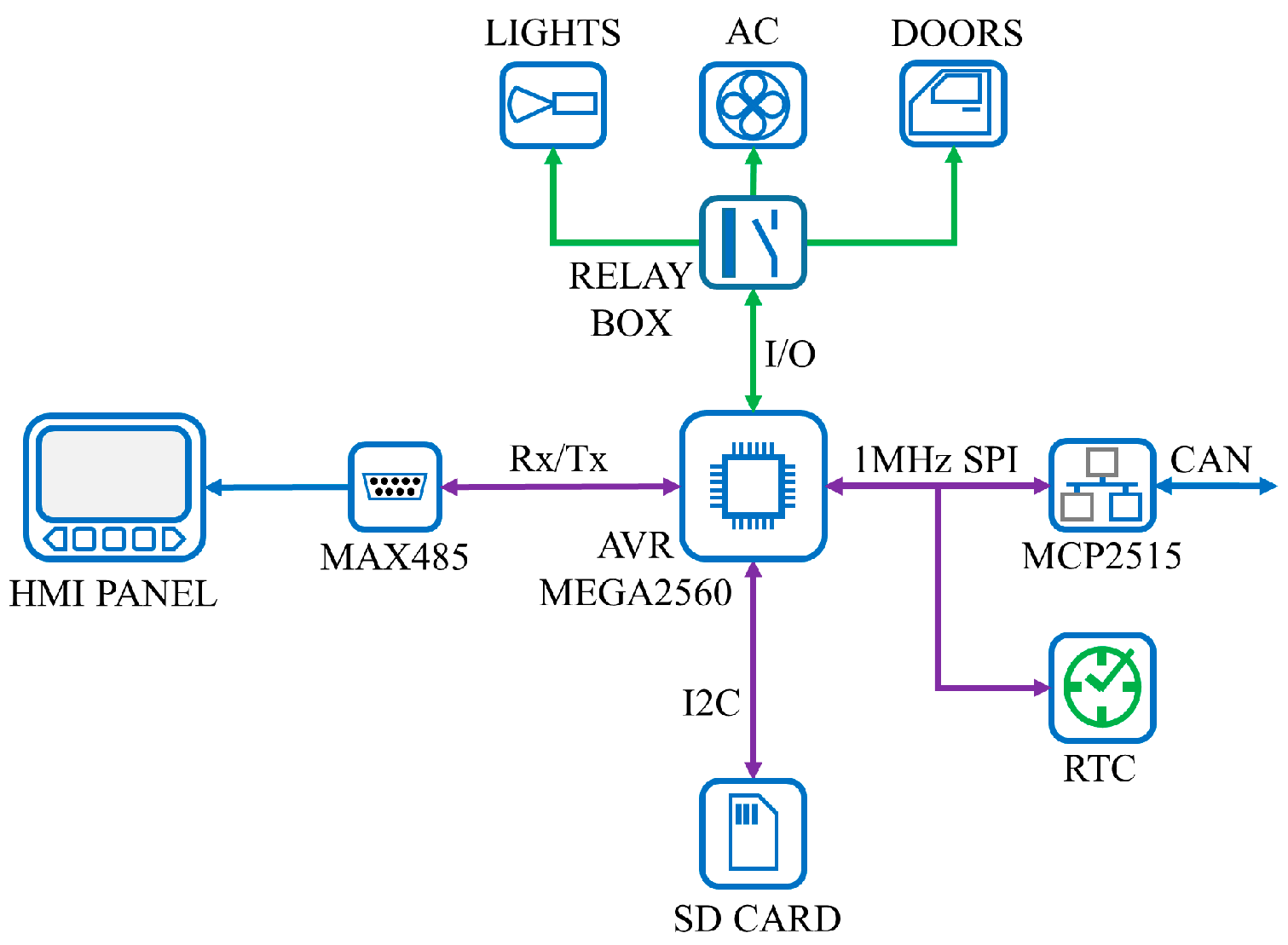
- Auxiliary systems—composed of the security system, GPS, trip memory, the human–machine interface (HMI), window and climate control, computer interface, and/or Wi-Fi connectivity.
2.1. ECU Software Architecture
- L1 is the base level, where the data packet is sent across the communication cable; it consists of UART interrupts that transmit and receive data.
- L2 is the level where data is assembled into a serial packet; checks are also performed here to establish if the system has permission to communicate.
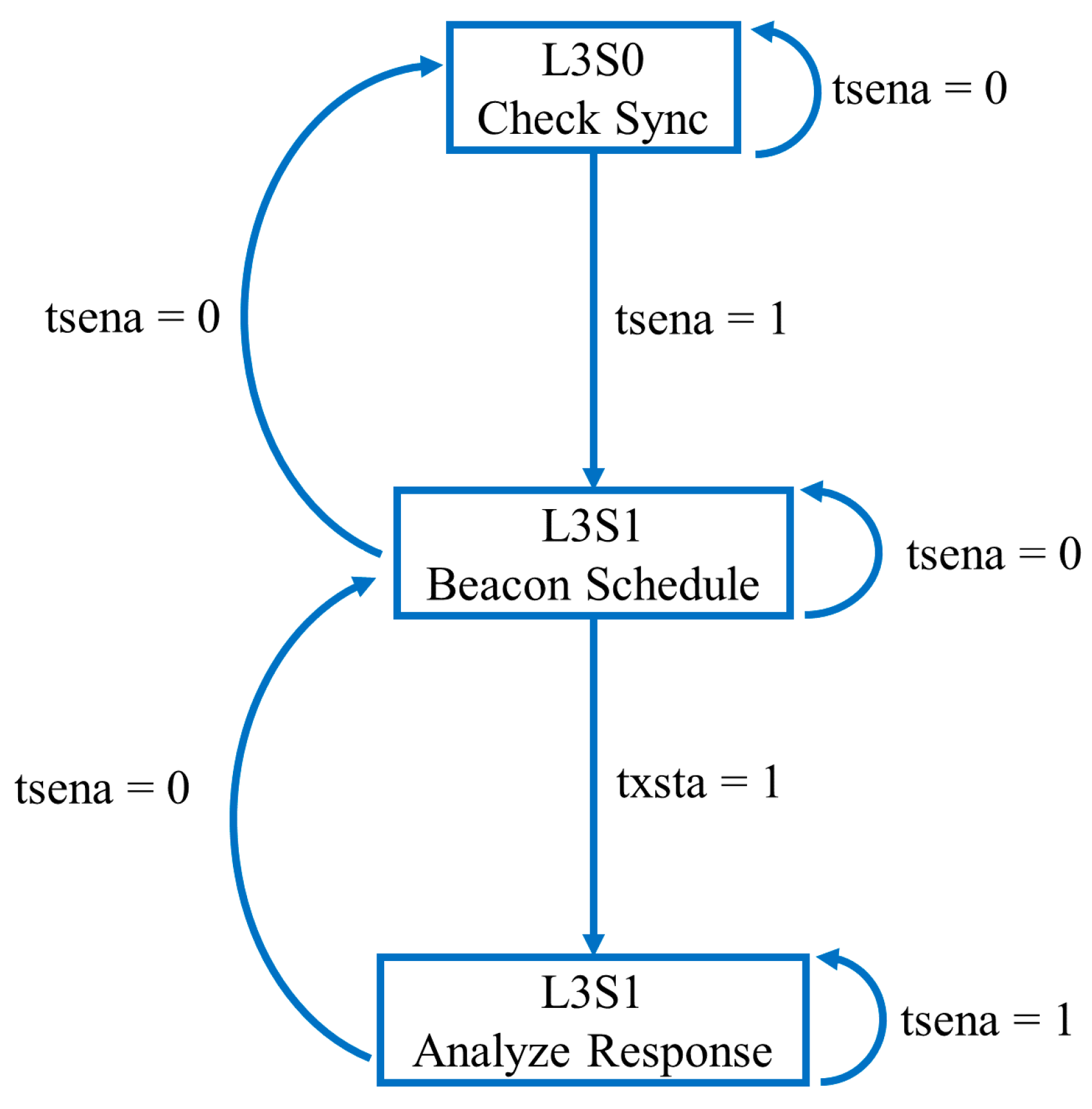
- L3 is the highest level and consists of a state machine that controls at what times the different processors can communicate with each other.
- L3S0 is the state in which confirmation of the beacon synchronization mechanism is acknowledged.
- L3S1 is the state in which the beacon data packet is generated, which is used as a pointer inside a predefined table that indicates which processor is allowed to communicate its data on the RS485 bus. After each beacon, a bit flag called txsta (transmission status) is set to 1, to indicate that a response is coming up next so no other communication can be initiated on the bus.
- L3S2 is the state in which the response from each processor is acknowledged and analyzed.
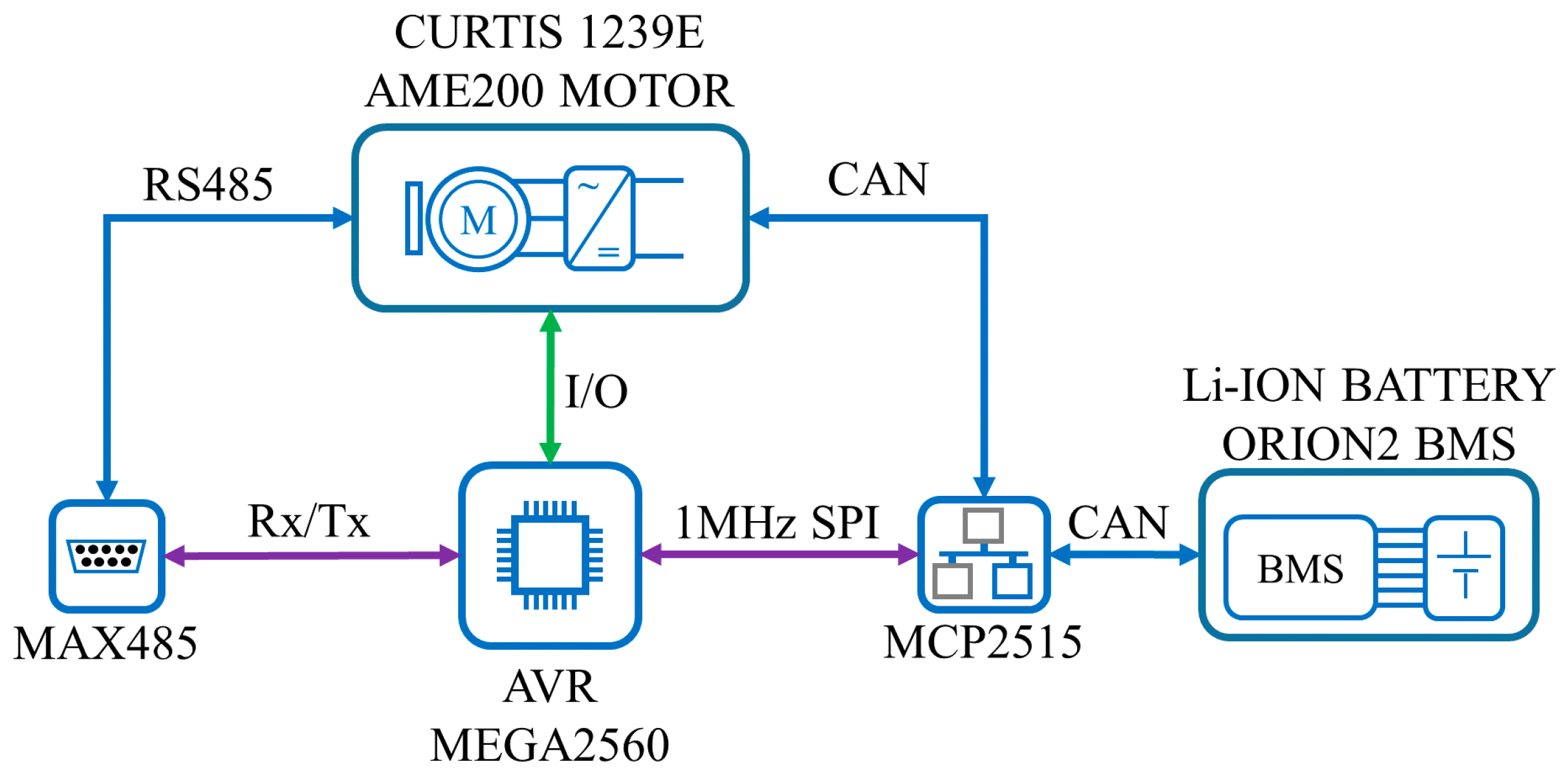
2.2. Power Train Control
- Li-ion batteries;
- Battery management system;
- Electric motor with permanent magnets;
- Power inverter;
- External battery charger.
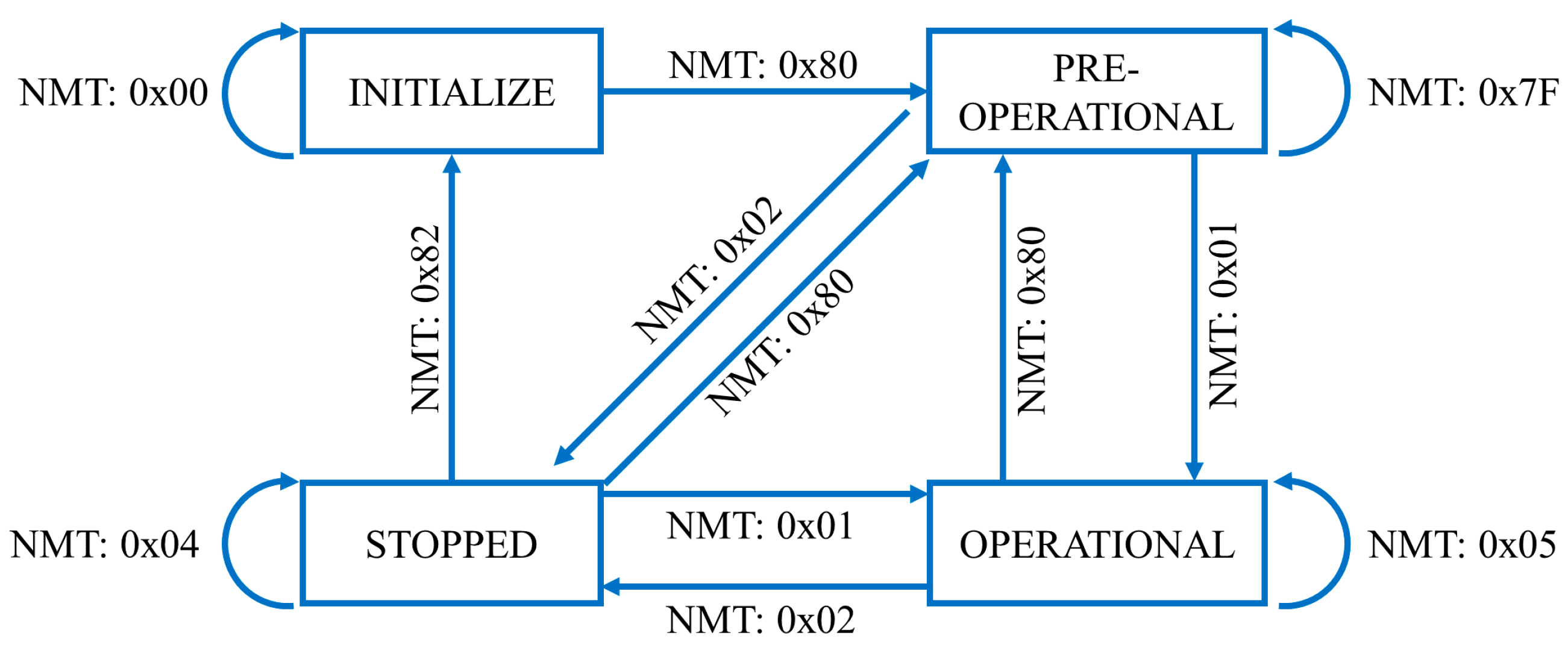
- From pre-operational to operational state—send NMT command code 0x01; the NMT data packet has the structure: COB_ID D0 D1, where COB_ID: 0x000, D0: 0x01—command byte to switch to operational state, D1: 0x26—inverter identifier;
- Check for NMT state code 0x05 on the heartbeat data packet, where the heartbeat is a special CANopen protocol, and has the structure COB_ID D0, with COB_ID: 0x700 + inverter identifier, D0: 0x05—current state (operational).
- CAN id: 0x626,
- Byte0: 0x47 (ccs = 010—request data from inverter),
- Byte1,2: SDO index with little endian notation—0x4C, 0x32,
- Byte3: SDO sub-index = 0x00,
- Full CAN message to request DC voltage: 0x626 0x47 0x4C 0x32 0x00.
- CAN message time: 104 ms,
- CAN id: 0x6B0,
- Byte0,1: Pack Current—16-bit value, with 0.1 A/bit scaling factor,
- Byte2,3: Pack Voltage—16-bit value, with 0.1 V/bit scaling factor,
- Byte4: State of Charge SOC—8-bit value, with 0.5 scaling factor,
- Byte5,6: Maximum pack temperature—16-bit value, with 1 °C/bit scaling factor,
- Byte7: Checksum for data integrity.
- IBAT(H), IBAT(L)—high and low bytes of the battery pack current;
- VABT(H), VBAT(L)—high and low bytes of battery pack voltage;
- SOC—state of charge of the battery;
- TMAX(H), TMAX(L)—high and low bytes of the maximum pack temperature;
- CS—checksum for data integrity.
- VCM(H), VCM(L)—high and low bytes of the maximum charging voltage;
- ICM(H), ICM(L)—high and low bytes of the maximum charging current;
- CHG—0—start charging, 1—stop charging.
- VO(H), VO(L)—high and low bytes of charger output voltage;
- IO(H), IO(L)—high and low bytes of output charger current;
- STATE—charger state.
2.3. Hydraulic Control
- hydraulic pump START/STOP—which activates the hydraulic pump;
- hydraulic actuator UP—controls an actuator moving up;
- hydraulic actuator DOWN—controls an actuator mowing down;
- hydraulic motor ON/OFF—enables a hydraulic motor;
- hydraulic motor throttle—controls the speed of the hydraulic motor.
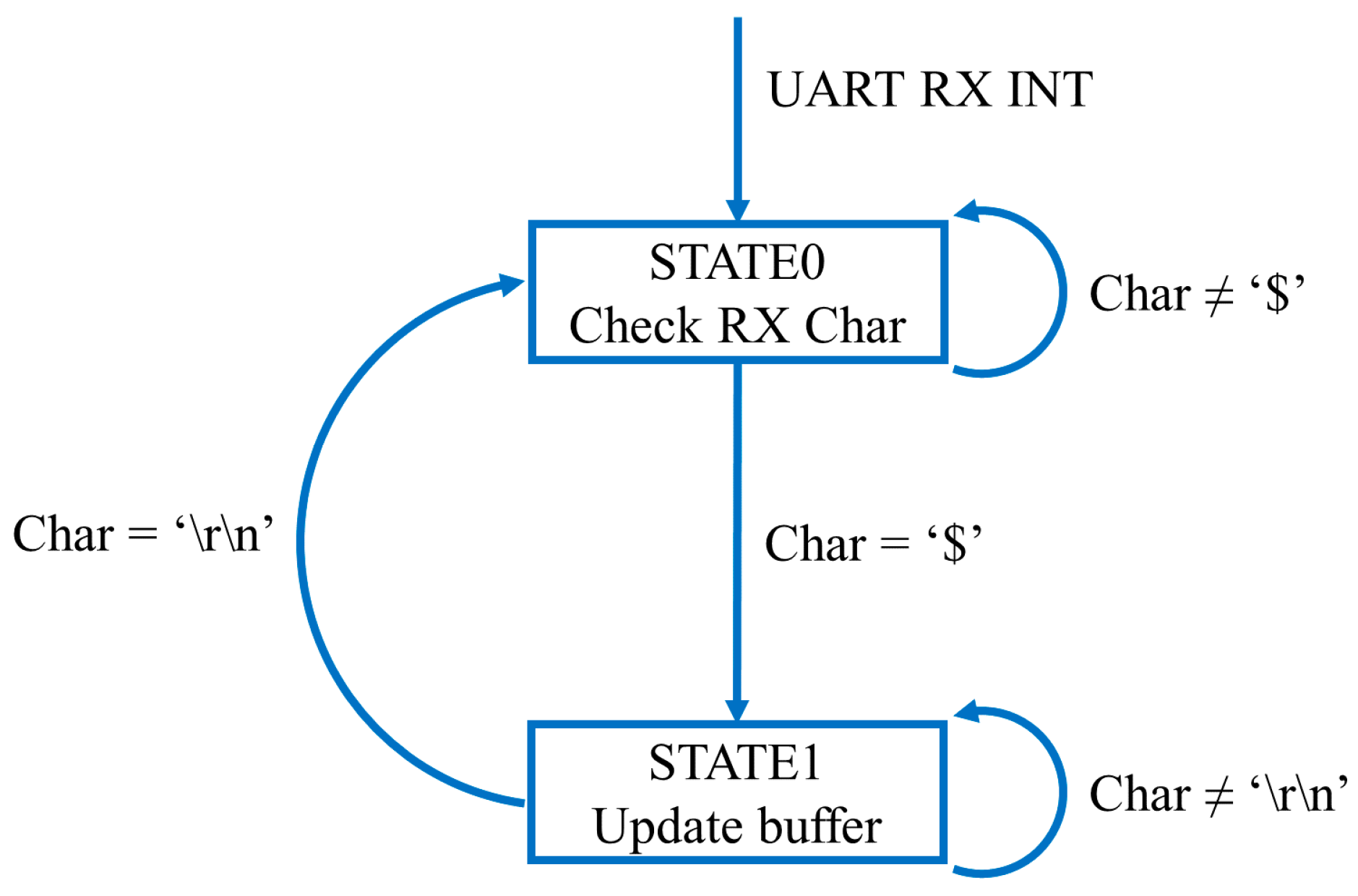
- STATE0—a character is read and, if it is equal to the $, which is the start character of a GPS packet, it will change to STATE1; otherwise, it remains in STATE0;
- STATE1—a buffer is set up and characters received are loaded in this buffer. A running count of the number of charters received is also updated. According to Table 3, if the sequence \r\n is received, which indicates the end of the GPS data packet, the buffer will be validated, and the state will change back to STATE0.
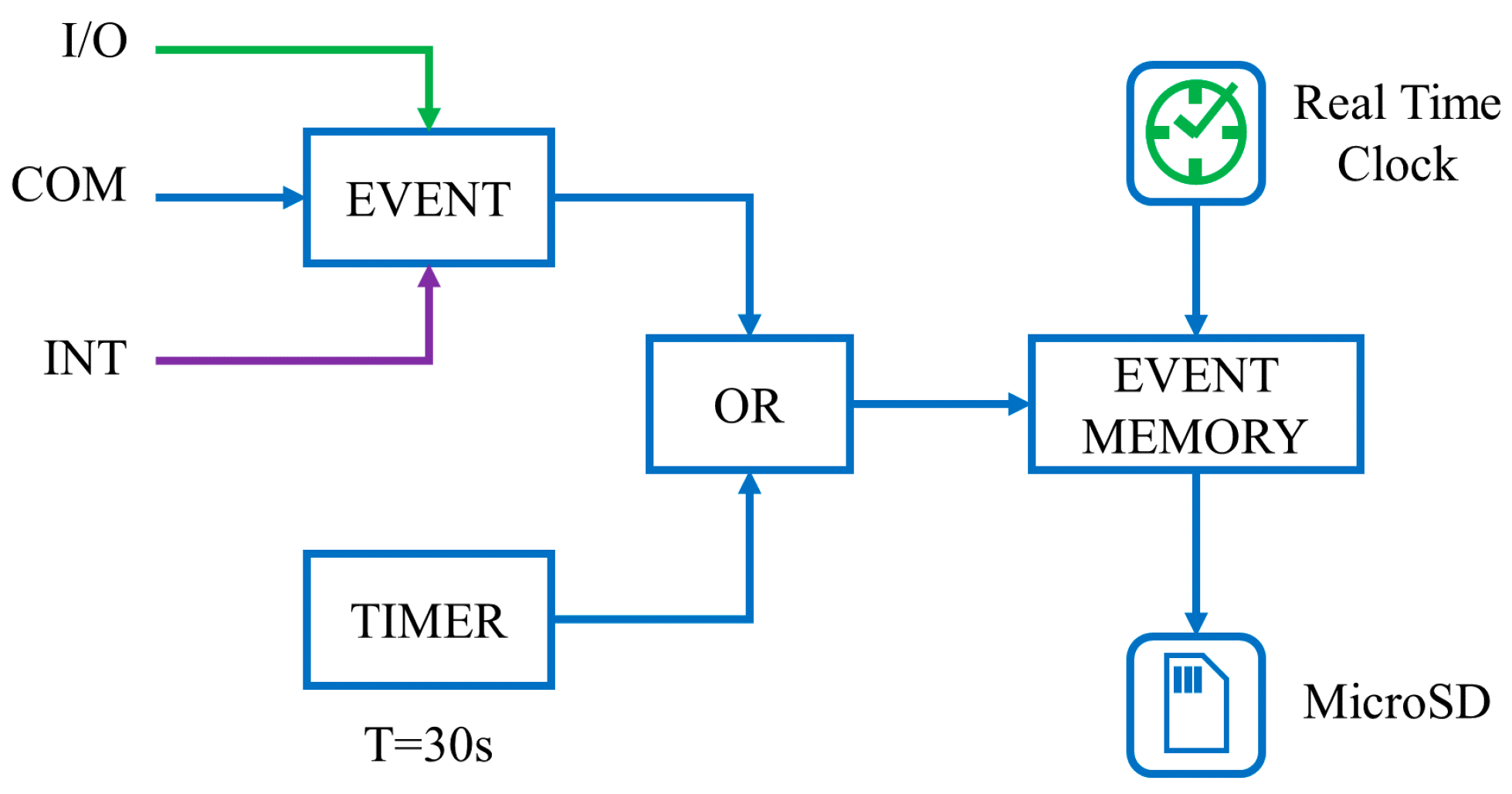
2.4. Auxiliary Systems Control
3. Results
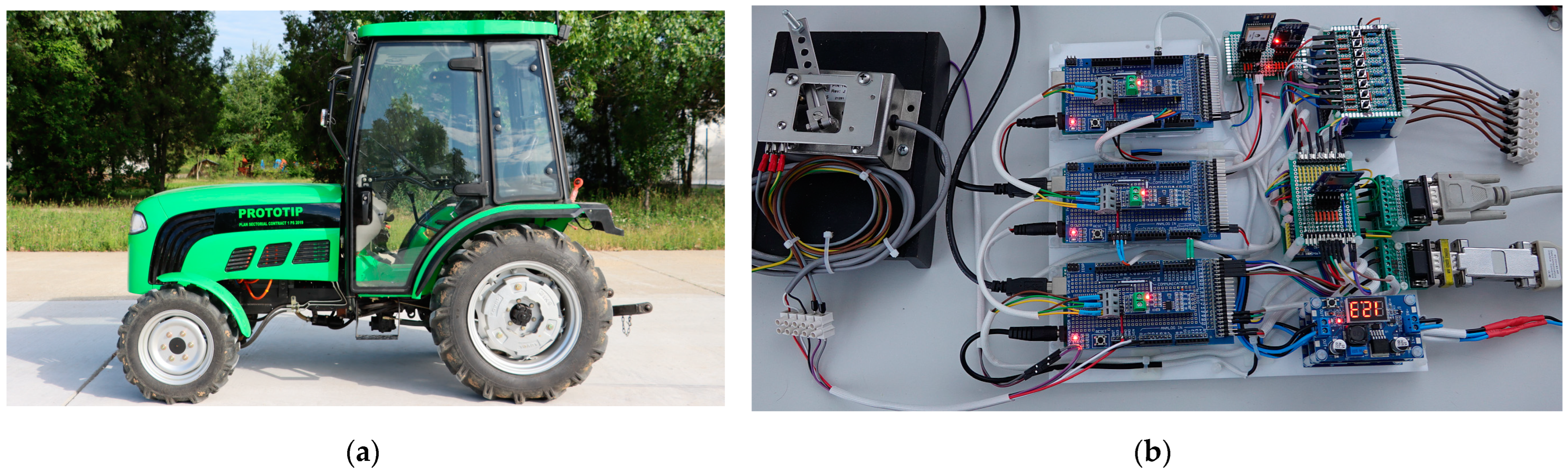
3.1. Experimental Setup
- The power train with a 60 ms control loop—affecting the power converter, the electric motor, the secondary battery, or fuel cell, and the battery management system (BMS);
- Hydraulic system operated at 180 ms—implying the electro-hydraulic pump, control valves, hydraulic actuators, proportional valves, oil tank, and cooling system;
- Auxiliary systems supervised at 960 ms—the diagnosis of the security system, GPS, trip memory, HMI, window and climate control, computer interface, and/or Wi-Fi connectivity.
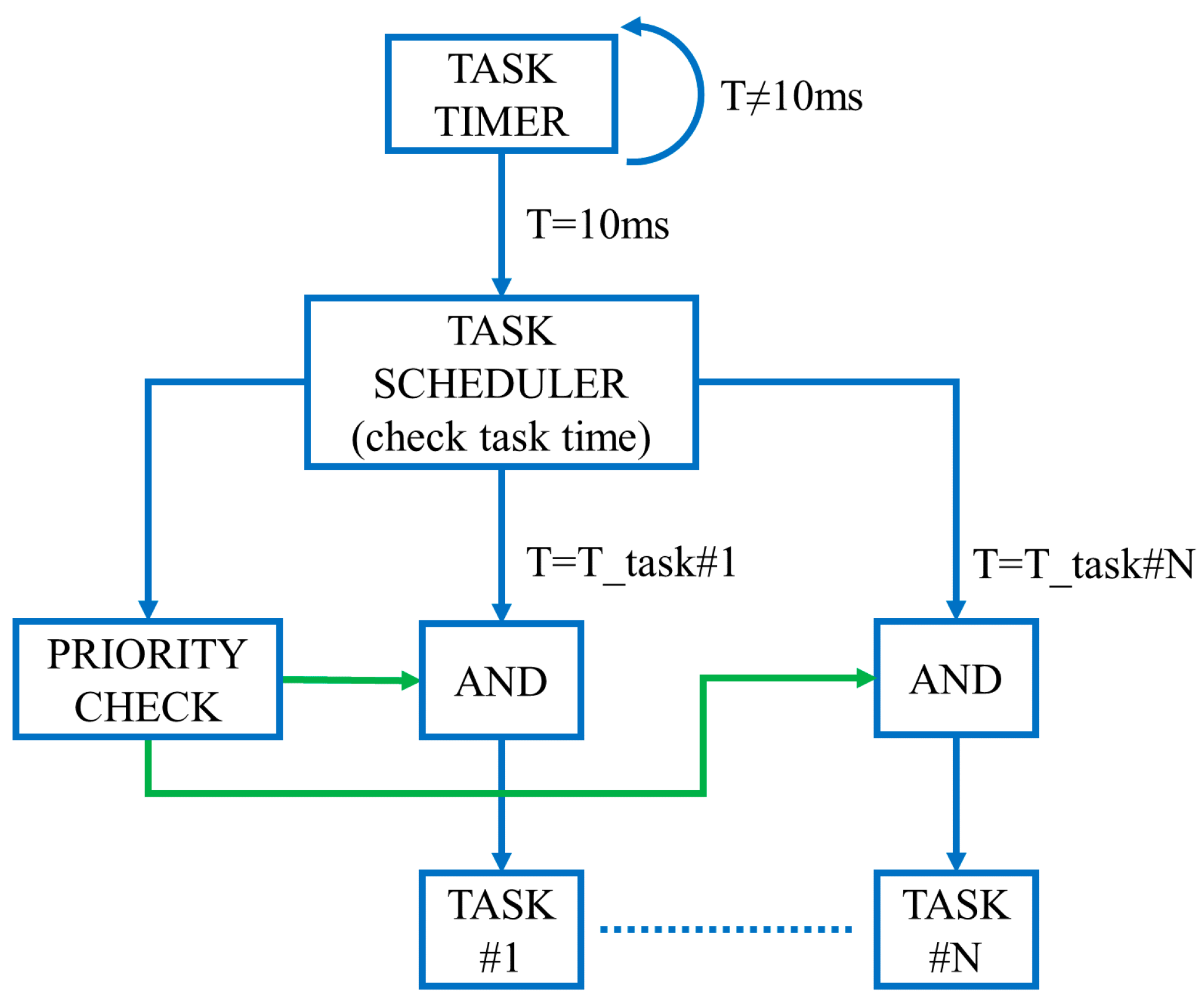
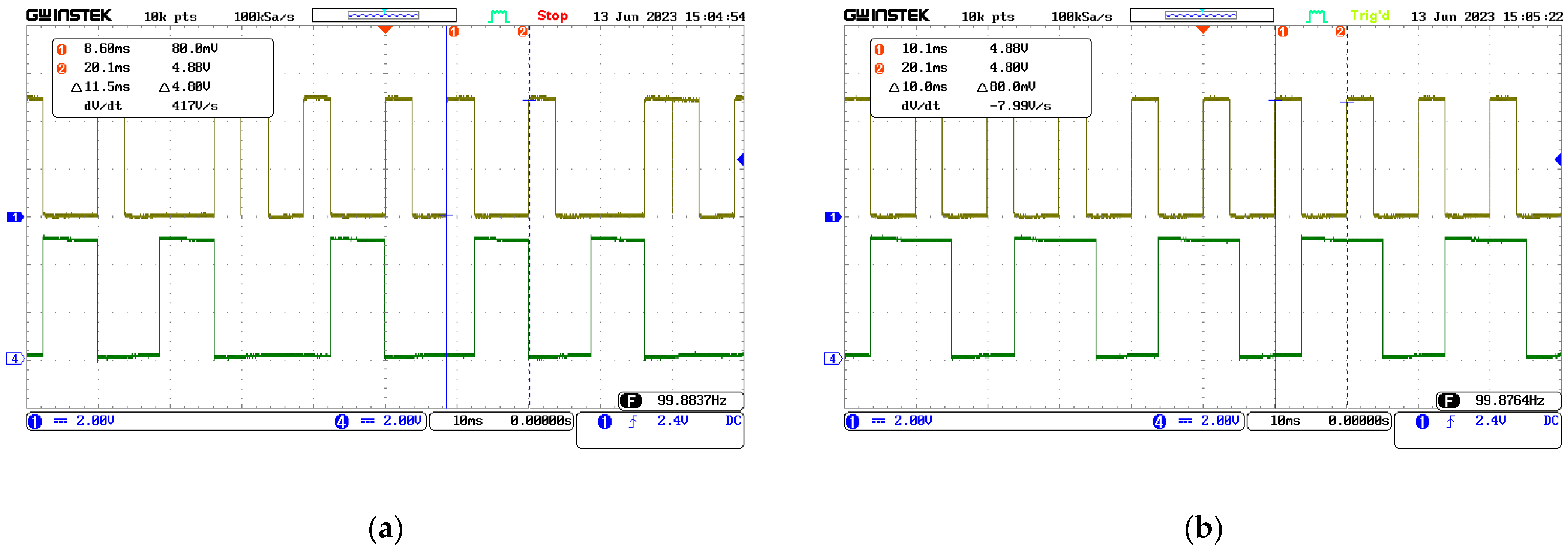
3.2. The Cooperative Multitasking System and the Beacon Protocol
- Task 1 is repeated every 10 ms and has a runtime of 3.7 ms;
- Task 2 is repeated every 20 ms and has a runtime of 7.5 ms.
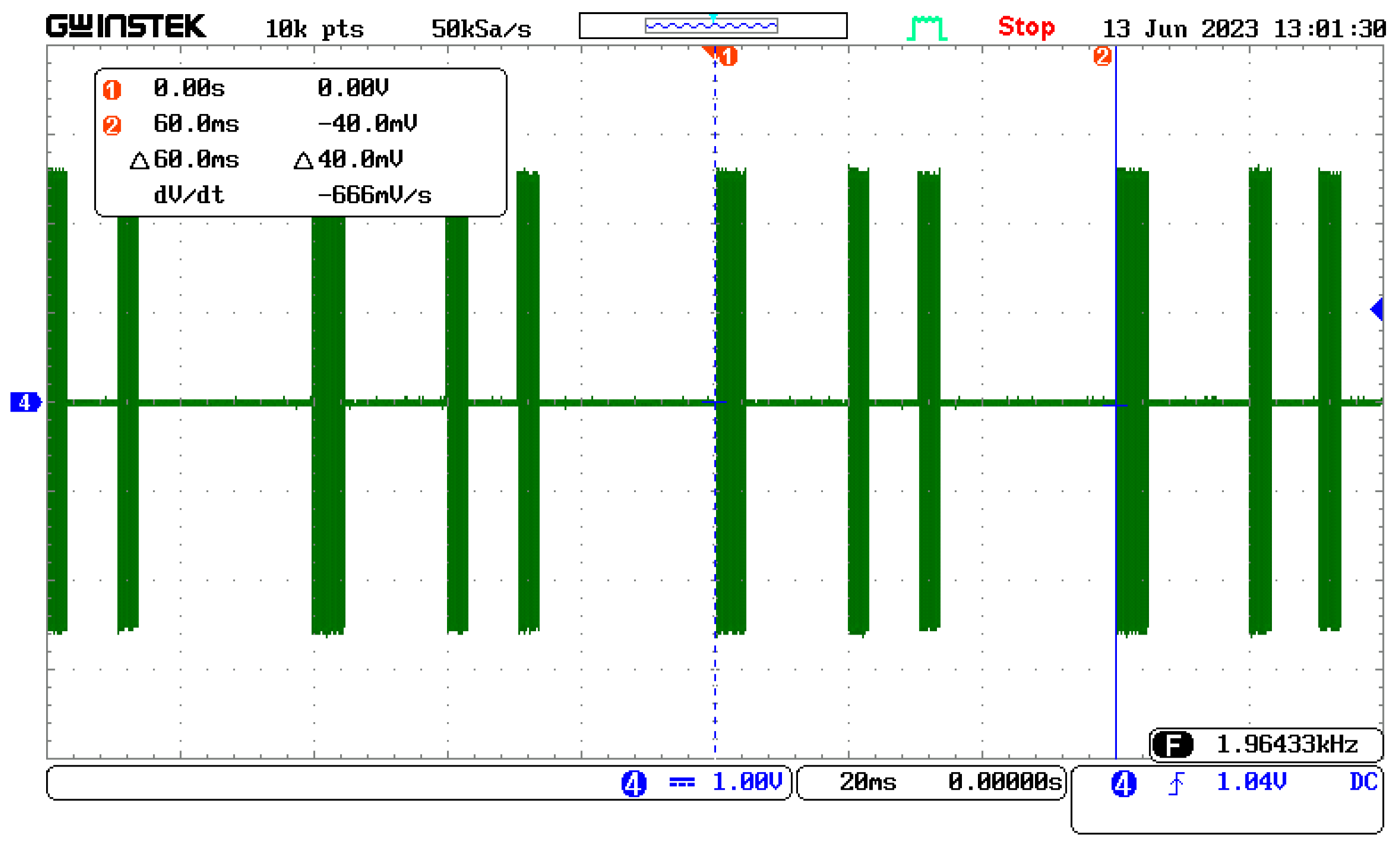
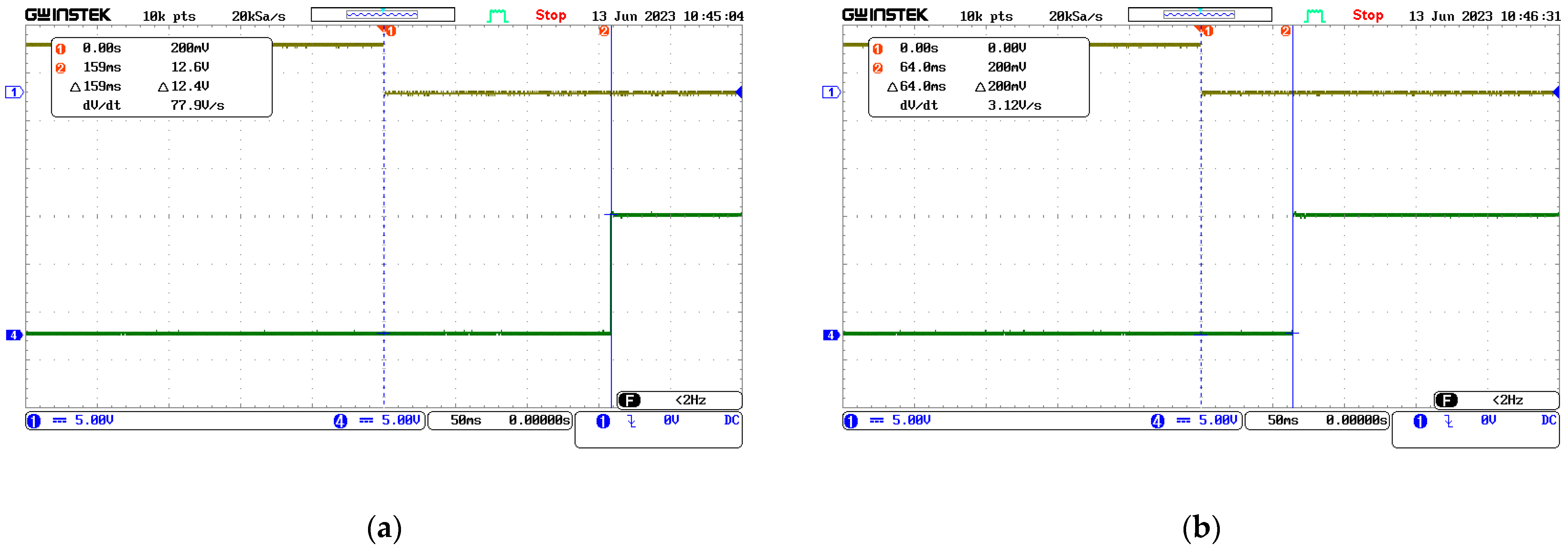
3.3. Execution Time of Hydraulic Commands
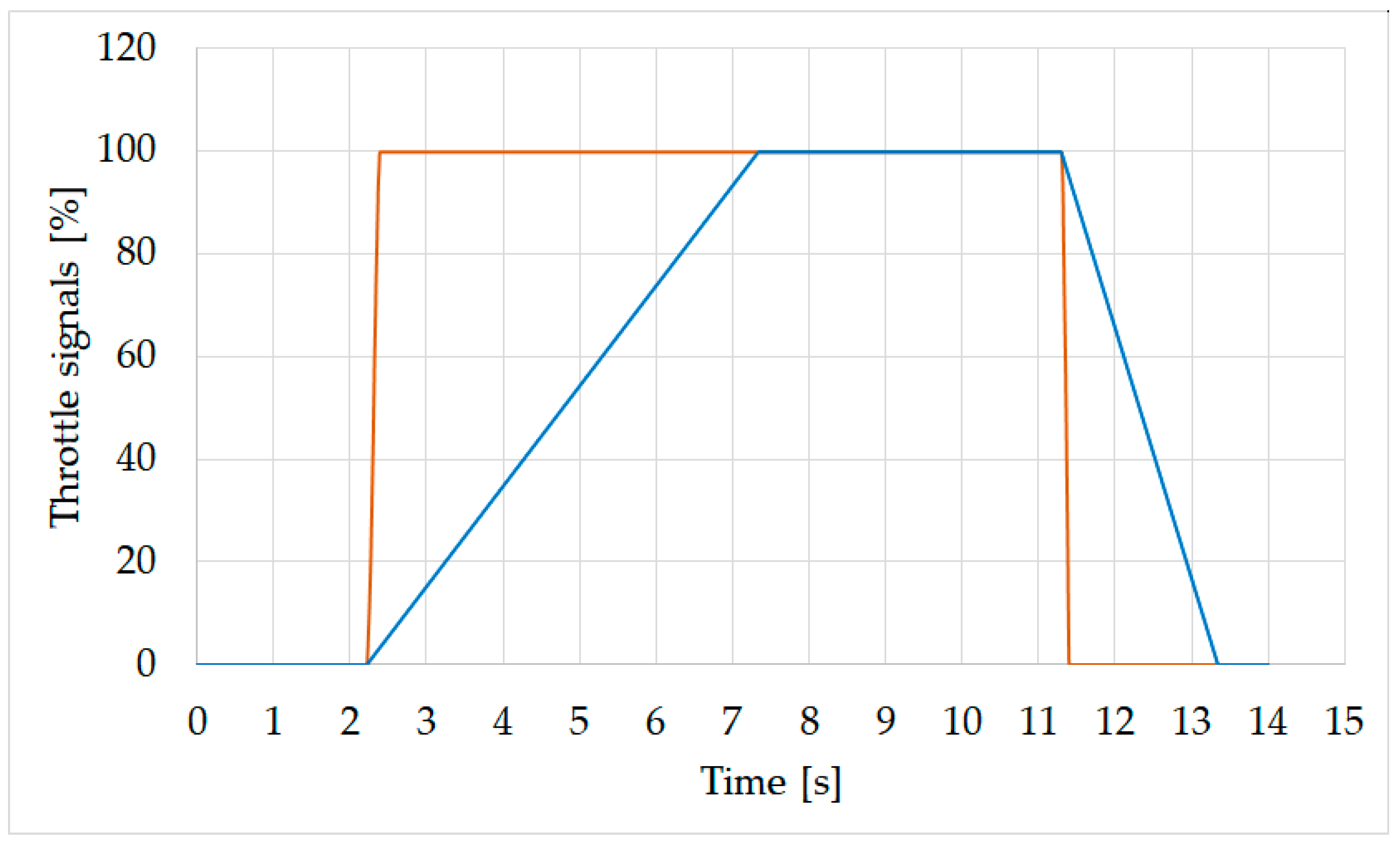
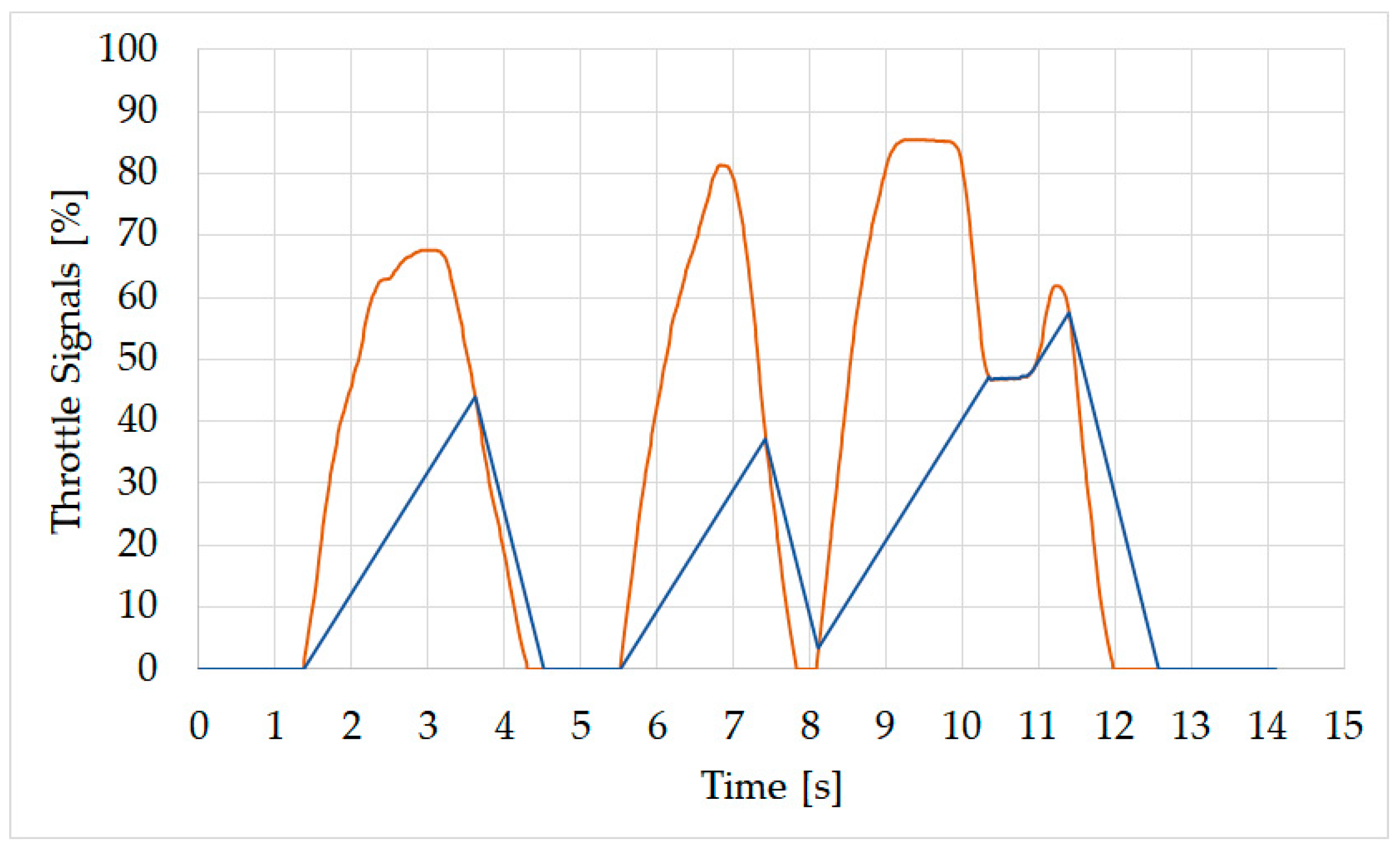
3.4. Motor Throttle Control
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McFadzean, B.; Butters, L. An investigation into the feasibility of hybrid and all-electric agricultural machines. Sci. Pap. Ser. A Agron. 2017, LX, 500–511. [Google Scholar]
- Dhond, R.; Srivastav, U.; Patil, B.T.; Vaishnav, H. Comparative Study of Electric Tractor and Diesel Tractor. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1168, 012003. [Google Scholar] [CrossRef]
- Electric Tractor Market: Overview. Available online: https://www.custommarketinsights.com/press-releases/global-electric-tractor-market/ (accessed on 29 May 2023).
- Global Electric Tractors Market. Available online: https://www.pheonixresearch.com/report/global-electric-tractor-market-ev.html (accessed on 29 May 2023).
- Caban, J.; Vrabel, J.; Šarkan, B.; Zarajczyk, J.; Marczuk, A. Analysis of the market of electric tractors in agricultural production. MATEC Web Conf. 2018, 244, 03005. [Google Scholar] [CrossRef]
- Khanna, S.; Mahamuni, A. Electric Tractor: Reviewing the Awareness and Factors Impacting Adoption in Indian Market. IJIRT 2018, 7, 315–320. [Google Scholar]
- Chen, Y.-C.; Chen, L.-W.; Chang, M.-Y. A Design of an Unmanned Electric Tractor Platform. Agriculture 2022, 12, 112. [Google Scholar] [CrossRef]
- Das, A.; Jain, Y.; Agrewale, M.R.B.; Bhateshvar, Y.K.; Vora, K. Design of a Concept Electric Mini Tractor. In Proceedings of the 2019 IEEE Transportation Electrification Conference (ITEC-India), Bengaluru, India, 17–19 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, X. Design Theory and Performance Analysis of Electric Tractor Drive System. Int. J. Eng. Res. Technol. 2017, 6, 235–238. [Google Scholar]
- Bessette, D.L.; Brainard, D.C.; Srivastava, A.K.; Lee, W.; Geurkink, S. Battery Electric Tractors:Small-Scale Organic Growers’ Preferences, Perceptions, and Concerns. Energies 2022, 15, 8648. [Google Scholar] [CrossRef]
- Grigore, I.; Cristea, M.; Matache, M.; Sorică, C.; Grigore, A.I.; Vladuțoiu, L.; Sorică, E.; Dumitru, I.; Petre, A.A.; Cristea, R.D. Study On the Conversion of a Conventional Tractor into an Electric Tractor. Ann. Univ. Craiova-Agric. Mont. Cadastre Ser. 2020, 50, 308–315. [Google Scholar]
- Didmanidze, O.N.; Parlyuk, E.P.; Fedotkin, R.S.; Kryuchkov, V.A.; Antonov, D.V. Problems and Prospects of Agricultural Tractors with Hybrid and Electric Drivetrain Creating. In Proceedings of the Intelligent Technologies and Electronic Devices in Vehicle and Road Transport Complex (TIRVED), Moscow, Russia, 10–11 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Chuandong, L.; Min, L. Research on path planning of electric tractor based on improved ant colony algorithm. In Proceedings of the 25th International Conference on Electrical Machines and Systems (ICEMS), Chiang Mai, Thailand, 29 November–2 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Z.; Yang, Y.; Wang, D.; Cai, Y.; Lai, L. Energy Saving Performance of Agricultural Tractor Equipped with Mechanic-Electronic-Hydraulic Powertrain System. Agriculture 2022, 12, 436. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, T.; Zhang, H.; Tian, G.; Liu, R.; Yang, J.; Zhang, Z. Power Parametric Optimization of an Electro-Hydraulic Integrated Drive System for Power-Carrying Vehicles Based on the Taguchi Method. Processes 2022, 10, 867. [Google Scholar] [CrossRef]
- Tudor, E.; Matache, M.G.; Sburlan, I.C.; Vasile, I.; Cristea, M. Electric Circuits Dimensioning for Small Power Electric Tractor. In Proceedings of the 10th International Symposium, Agricultural and Mechanical Engineering, Bucharest, Romania, 30 October 2020; pp. 104–113. [Google Scholar]
- Tudor, E.; Matache, M.-G.; Vasile, I.; Sburlan, I.-C.; Stefan, V. Automation and Remote Control of an Aquatic Harvester Electric Vehicle. Sustainability 2022, 14, 6360. [Google Scholar] [CrossRef]
- Kopják, J.; Kovács, J. Timed cooperative multitask for tiny real-time embedded systems. In Proceedings of the 10th IEEE Jubilee International Symposium on Applied Machine Intelligence and Informatics, Herl’any, Slovakia, 26–28 January 2012; pp. 377–382. [Google Scholar] [CrossRef]
- Pont, J. Patterns for Time-Triggered Embedded Systems, 3rd ed.; Addison-Wesley: London, UK, 2001. [Google Scholar]
- Rossetto, J.; Rodriguez, N. A cooperative multitasking model for networked sensors. In Proceedings of the 26th IEEE International Conference on Distributed Computing Systems Workshops (ICDCSW’06), Lisboa, Portugal, 4–7 July 2006; p. 91. [Google Scholar] [CrossRef]
- CAN in Automation (CiA). Available online: https://www.can-cia.org/groups/specifications (accessed on 22 May 2023).
- NMEA Reference Manual. Available online: https://www.sparkfun.com/datasheets/GPS/NMEAReferenceManual1.pdf (accessed on 22 May 2023).
- MAX485. Available online: https://www.analog.com/en/products/max485.html#product-overview (accessed on 13 June 2023).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | SDO Index | SDO Sub-Index | Bit Description of Byte 0 | ||||
|---|---|---|---|---|---|---|---|
| ccs | rez | n | e | s | |||
| DC voltage | 0x324C | 0x00 | 010 | 0 | 01 | 1 | 1 |
| Inverter temperature | 0x322A | 0x00 | |||||
| Motor current | 0x3209 | 0x00 | |||||
| Motor temperature | 0x320B | 0x00 | |||||
| Motor RPM | 0x3207 | 0x00 | |||||
| Throttle command | 0x3218 | 0x00 | 001 | 0 | 01 | 1 | 1 |
| CAN Node | CAN ID | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7 |
|---|---|---|---|---|---|---|---|---|---|
| BMS to ECU | 0x6B0 | IBAT(H) | IBAT(L) | VBAT(H) | VBAT(L) | SOC | TMAX(H) | TMAX(L) | CS |
| BMS to charger | 0x1806E5F4 | VCM(H) | VCM(L) | ICM(H) | ICM(L) | CHG | 0 | 0 | 0 |
| Charger to ECU | 0x18FF50E5 | VO(H) | VO(L) | IO(H) | IO(L) | STATE | 0 | 0 | 0 |
| Name | Example | Description |
|---|---|---|
| Message ID | $GPRMC | RMC protocol header |
| UTC | 161,229.487 | hhmmss.sss |
| Status | A | A: valid data |
| Latitude | 3723.2475 | ddmm.mmmm |
| Latitude direction | N | N: north; S: south |
| Longitude | 12,158.3416 | ddmm.mmmm |
| Longitude direction | W | W: west; E: east |
| Speed over ground | 0.13 | 0–999 knots |
| Course over ground | 309.62 | Degree with north reference |
| Date | 260,406 | Date (ddmmyy) |
| Magnetic variation | 3.05 | 0–180 |
| Mode | A | MODE |
| Checksum | *55 | Checksum for data integrity |
| End of message | /r/n |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vasile, I.; Tudor, E.; Sburlan, I.-C.; Matache, M.-G.; Cristea, M. Optimization of the Electronic Control Unit of Electric-Powered Agricultural Vehicles. World Electr. Veh. J. 2023, 14, 267. https://doi.org/10.3390/wevj14100267
Vasile I, Tudor E, Sburlan I-C, Matache M-G, Cristea M. Optimization of the Electronic Control Unit of Electric-Powered Agricultural Vehicles. World Electric Vehicle Journal. 2023; 14(10):267. https://doi.org/10.3390/wevj14100267
Chicago/Turabian StyleVasile, Ionuț, Emil Tudor, Ion-Cătălin Sburlan, Mihai-Gabriel Matache, and Mario Cristea. 2023. "Optimization of the Electronic Control Unit of Electric-Powered Agricultural Vehicles" World Electric Vehicle Journal 14, no. 10: 267. https://doi.org/10.3390/wevj14100267
APA StyleVasile, I., Tudor, E., Sburlan, I. -C., Matache, M. -G., & Cristea, M. (2023). Optimization of the Electronic Control Unit of Electric-Powered Agricultural Vehicles. World Electric Vehicle Journal, 14(10), 267. https://doi.org/10.3390/wevj14100267