
Smooth Switching Method for Multi-Mode Synchronous Space Vector Modulation of NPC Three-Level Inverter



Abstract
:1. Introduction
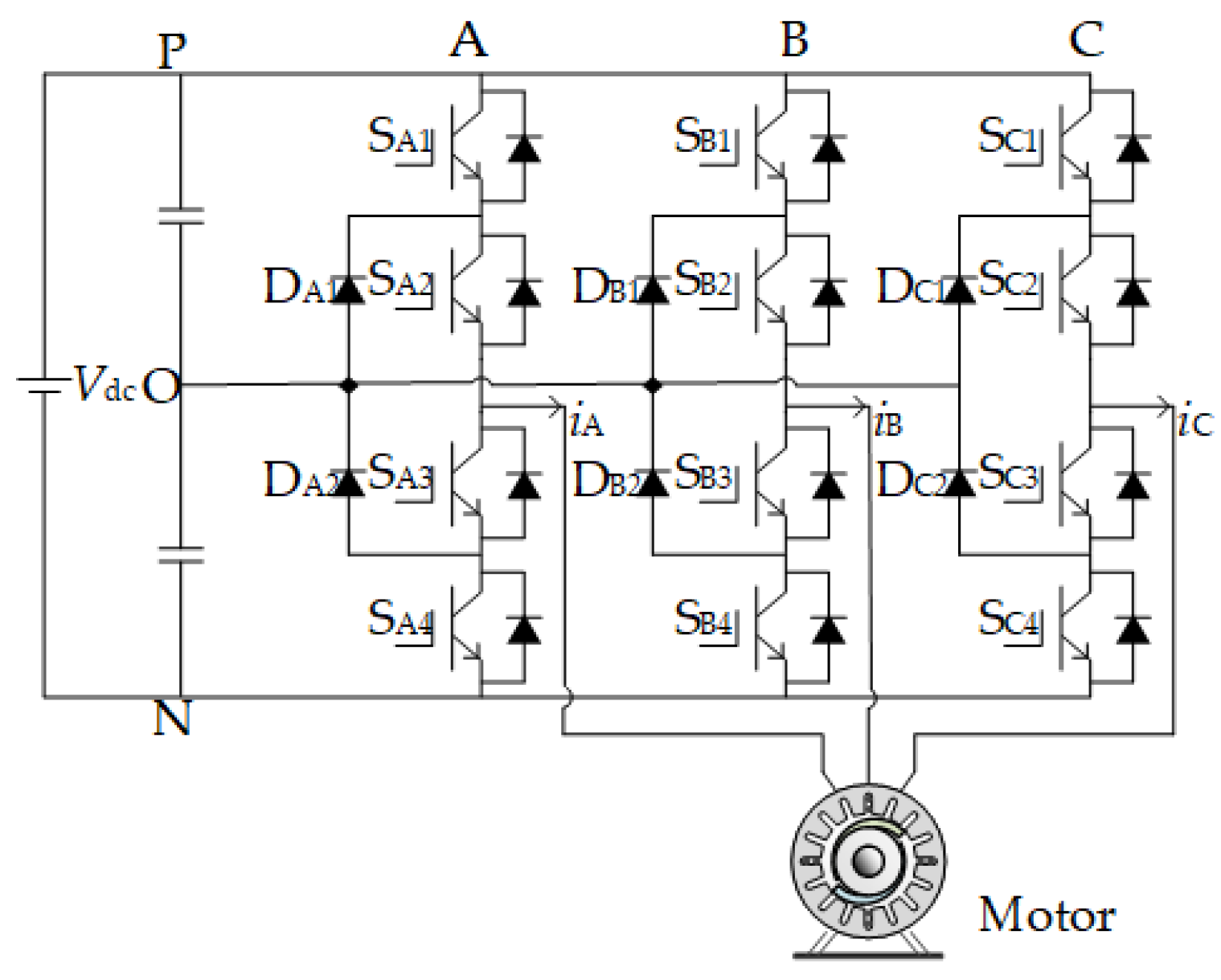
2. Synchronous Space Vector Modulation Method for Three-Level Inverter
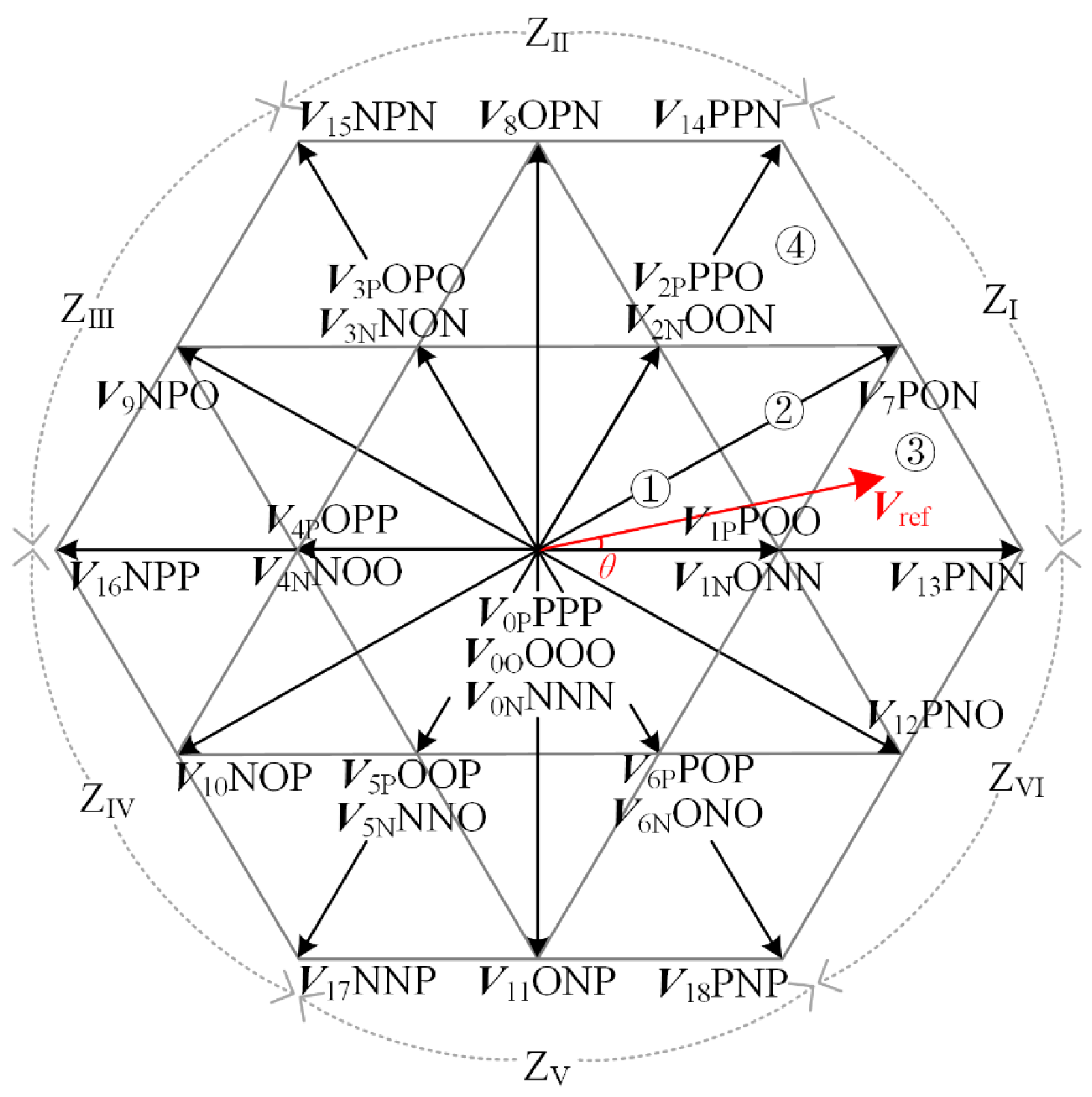
2.1. Basic Principle of Synchronous Space Vector Modulation
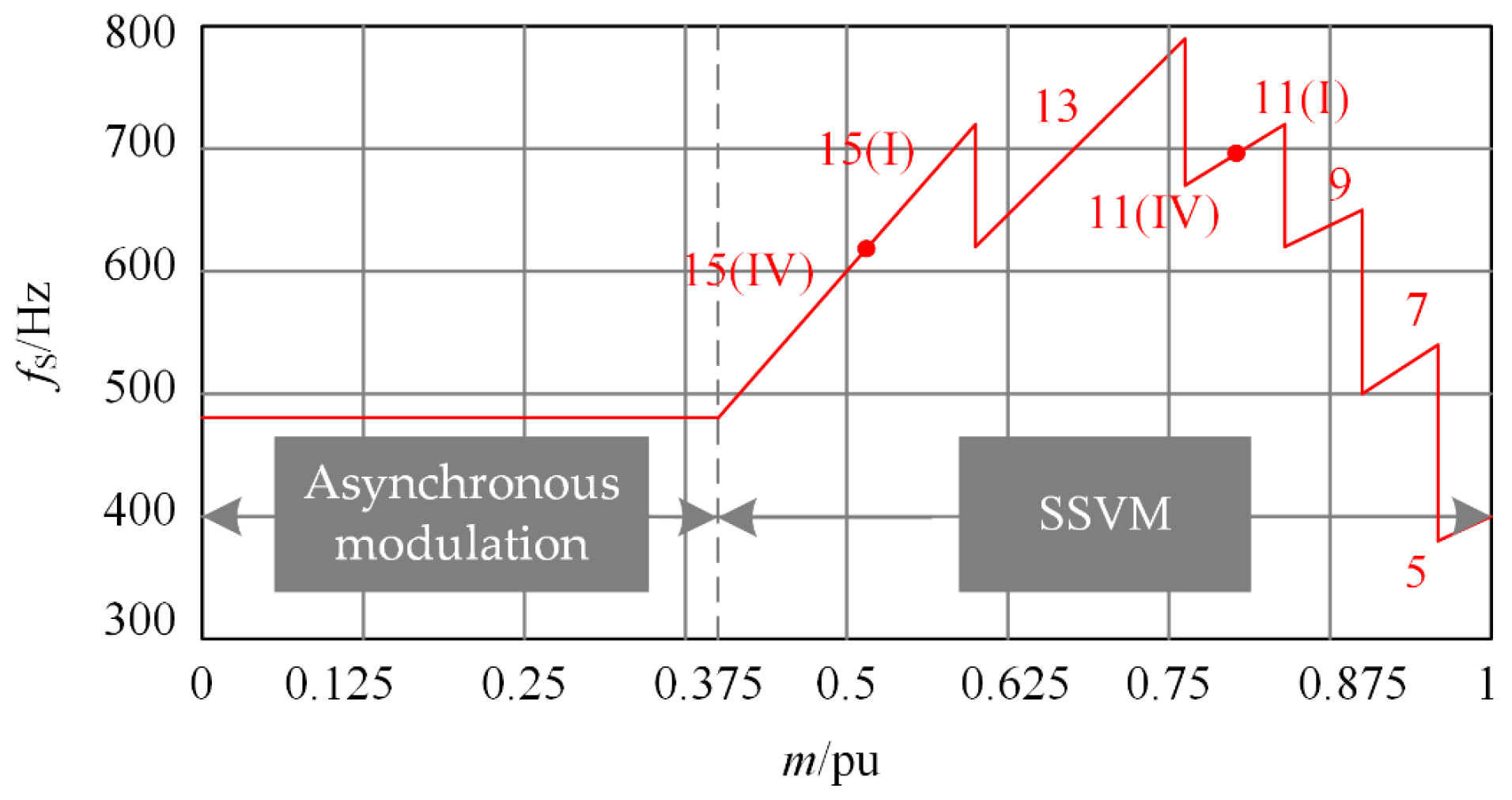
2.2. Multi-Mode Synchronous Space Vector Modulation Method
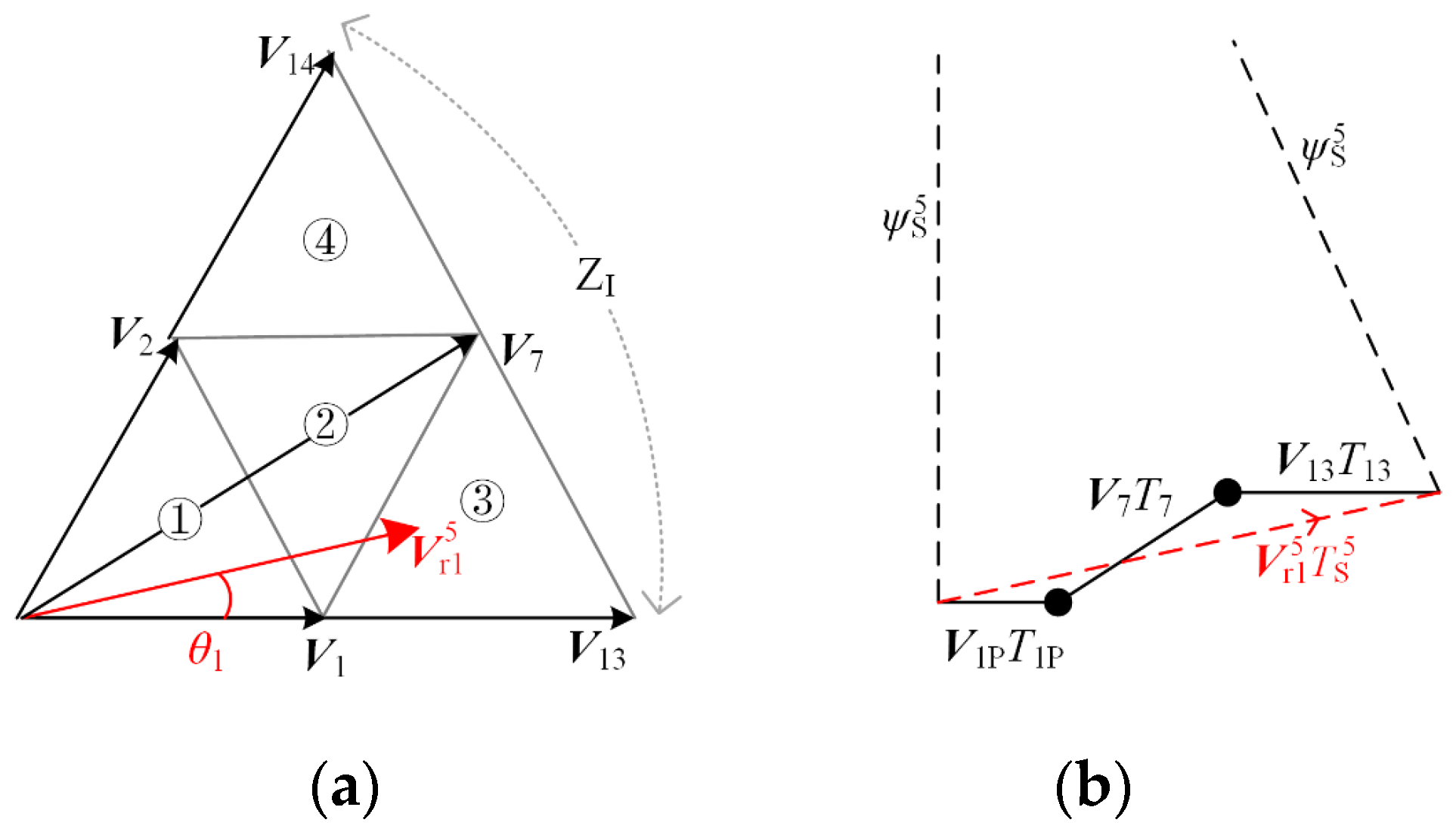
3. Stator Flux Trajectories of Synchronous Space Vector Modulation
3.1. The Change of Stator Flux Trajectories during Pulse Pattern Switching
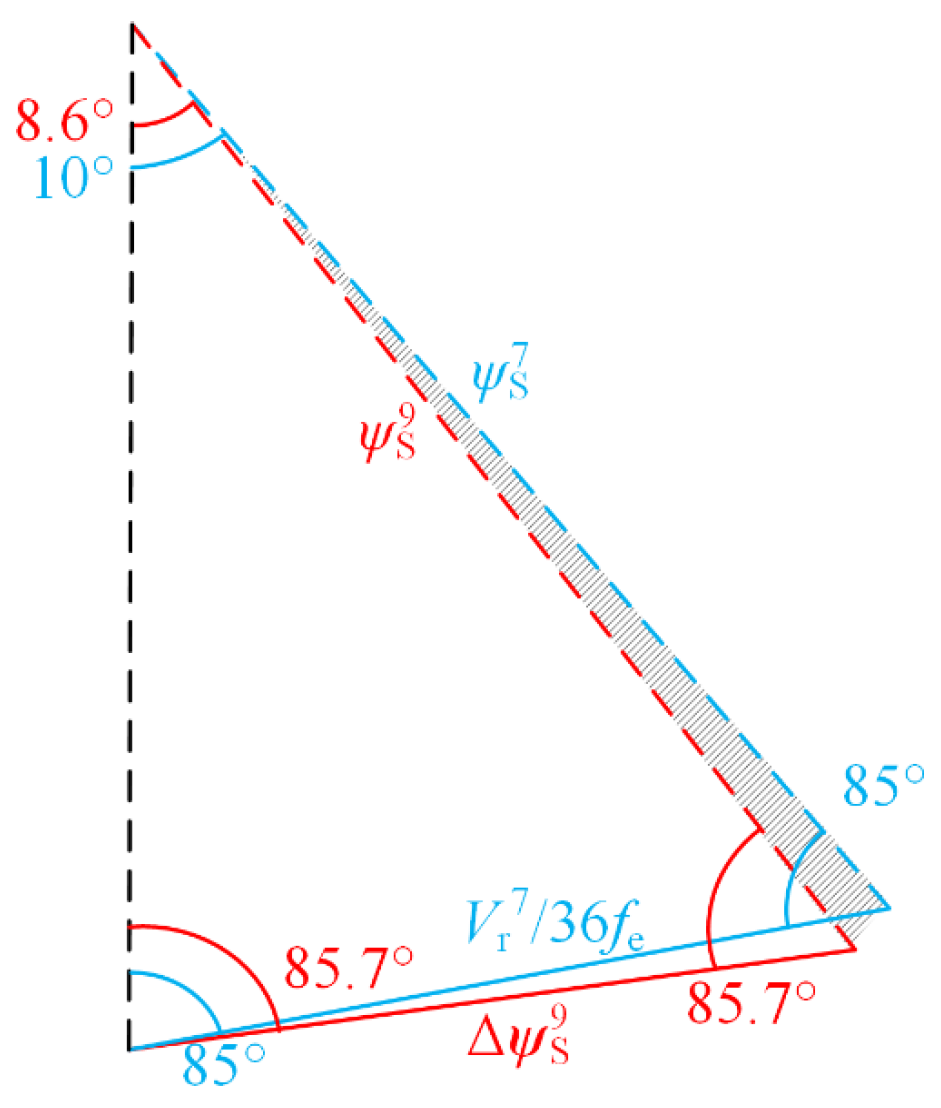
3.2. Stator Flux Trajectories Calculation
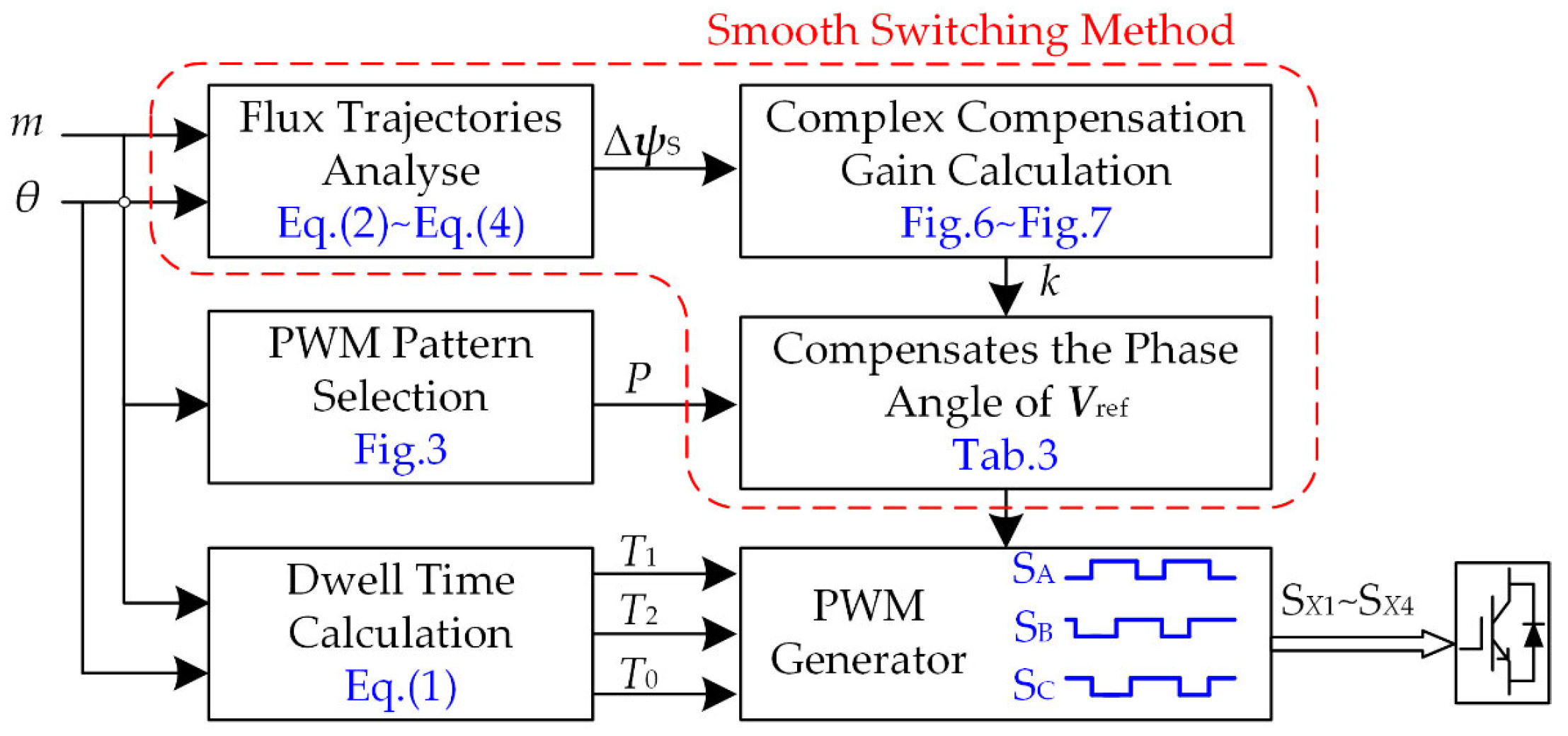
4. Smooth Switching Method
4.1. Switch between Asynchronous Modulation and SSVM_15 (IV)
4.2. Switching between Different Clamping Methods of SSVM
4.3. Switching between Different Pulse Numbers of SSVM
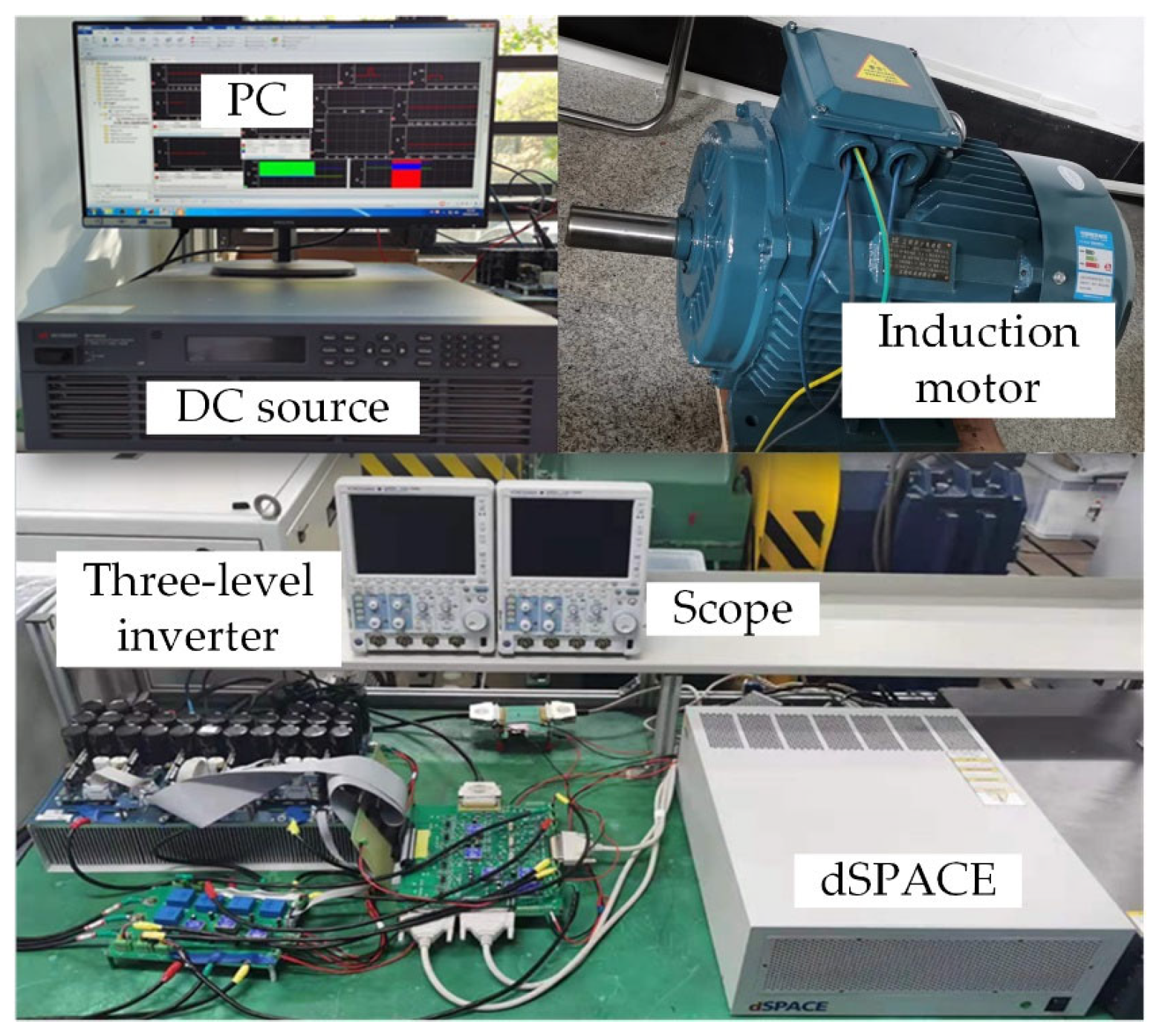
5. Experimental Result
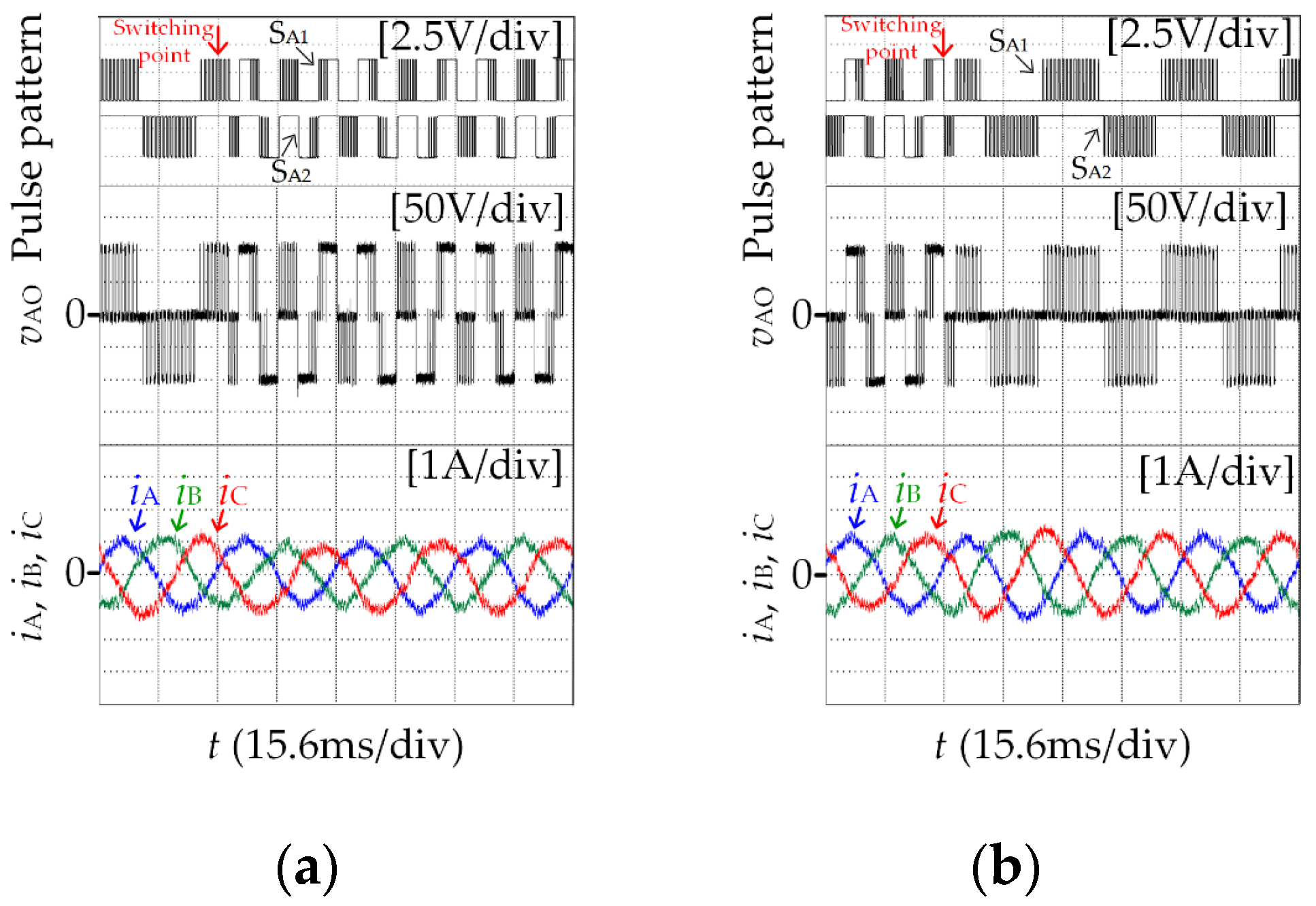
5.1. Switching Experiment of Asynchronous Modulation and Synchronous Modulation
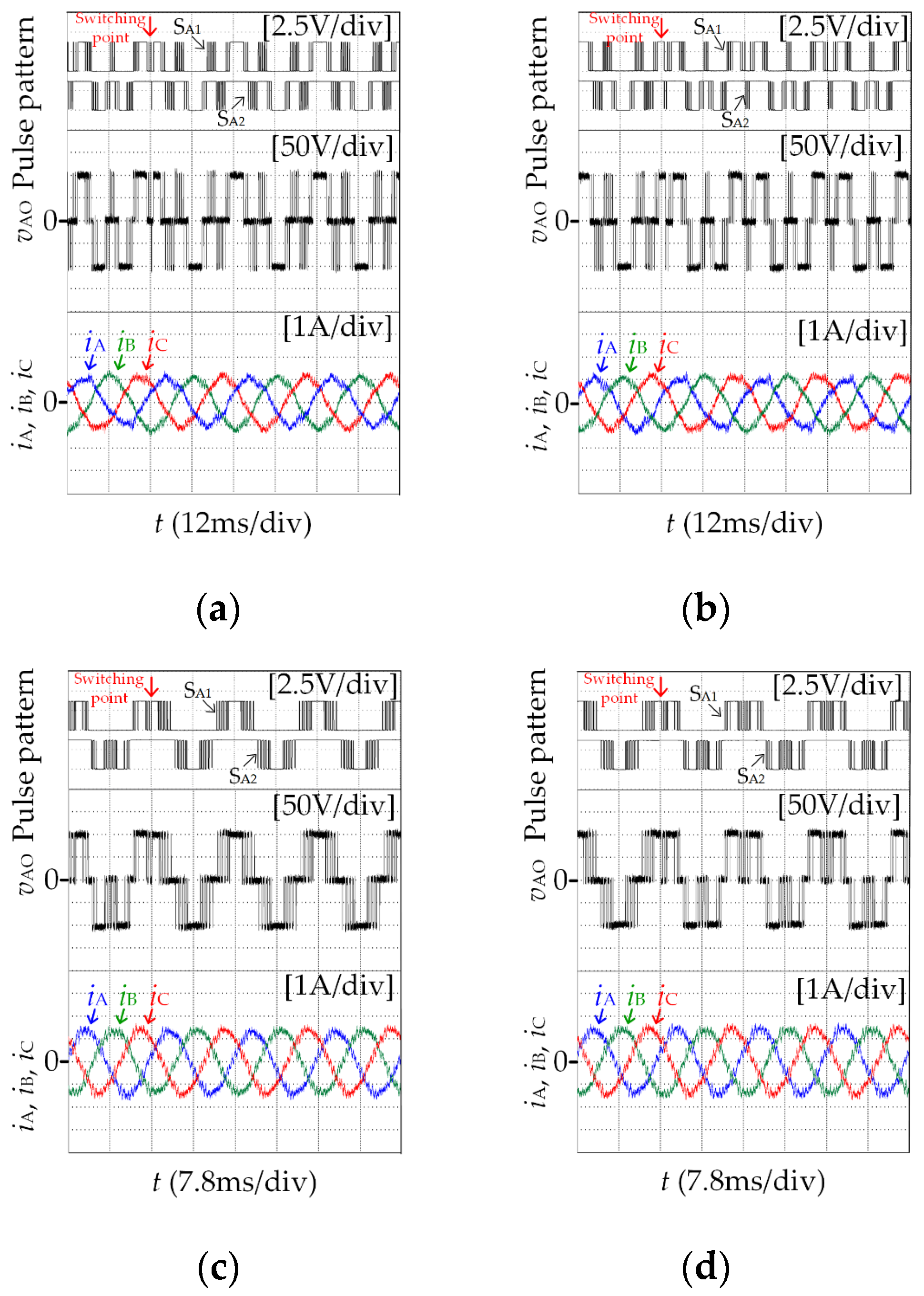
5.2. Switching Experiment of Different Clamping Methods of SSVM
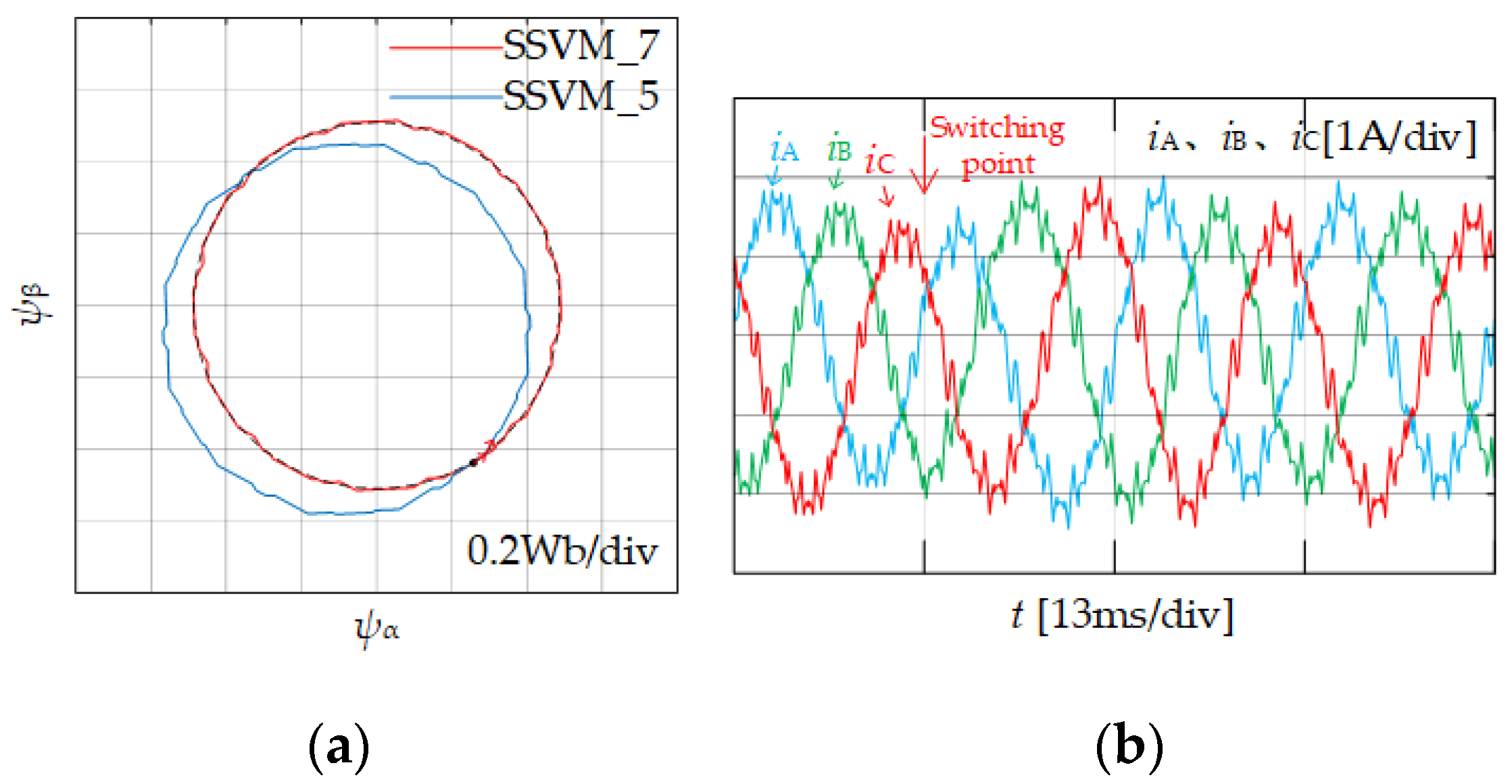
5.3. Switching Experiment of Different Pulse Numbers of SSVM
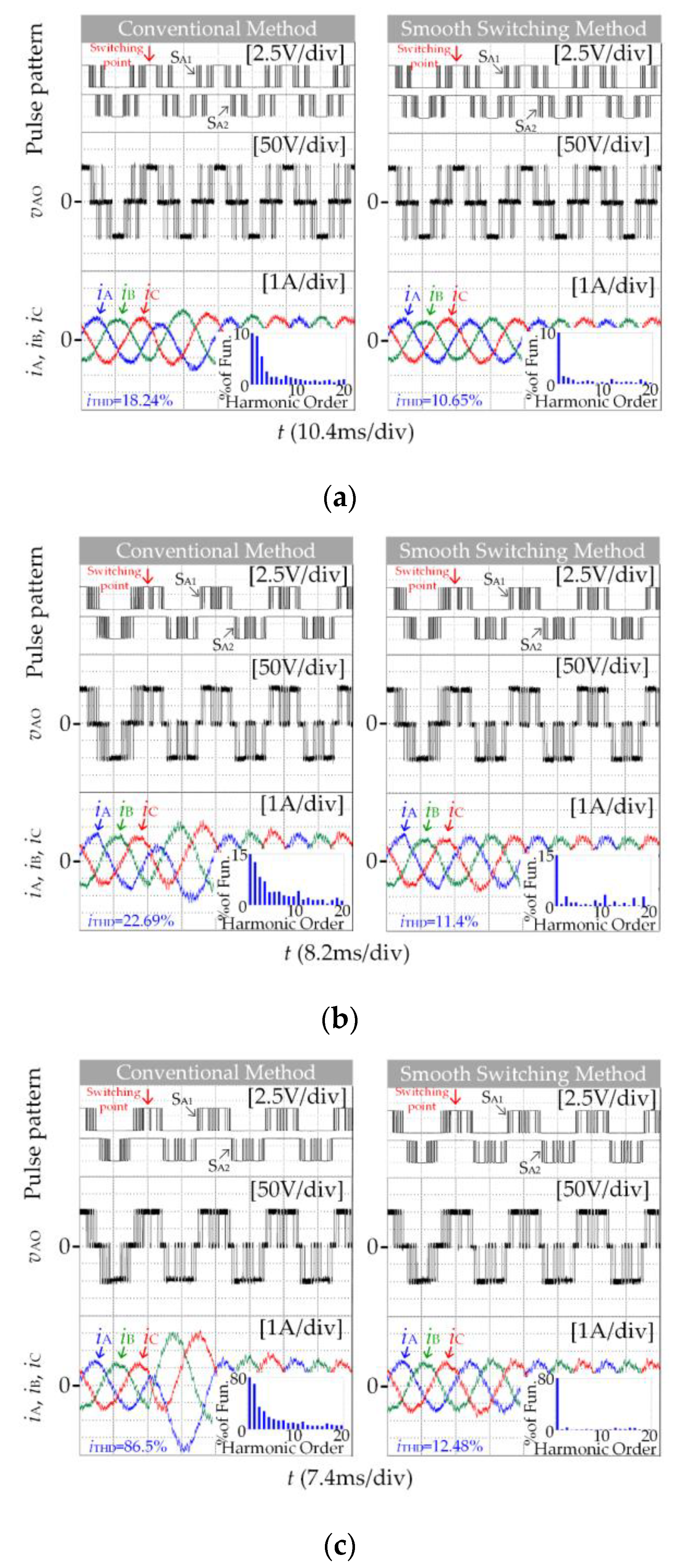
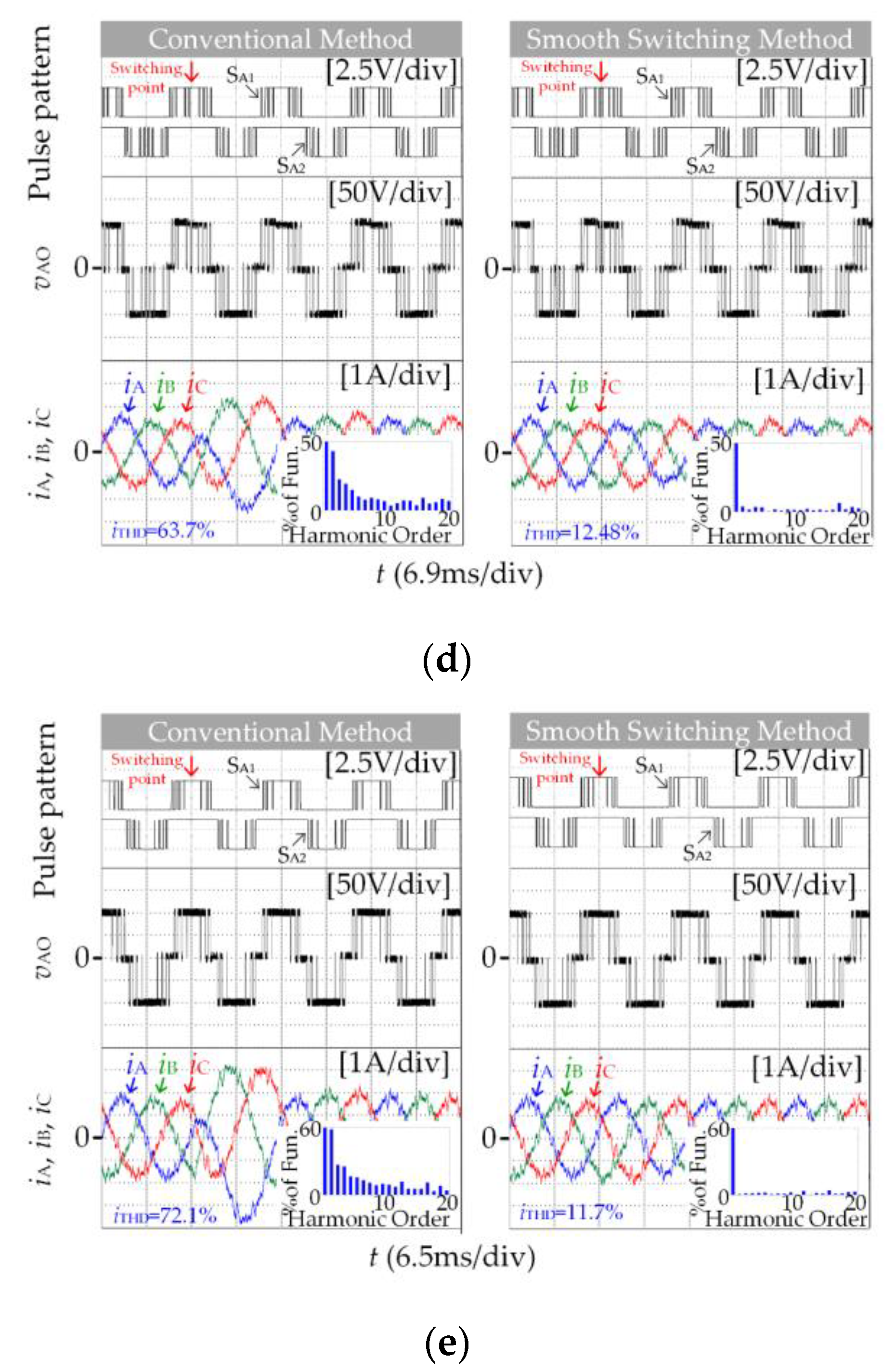
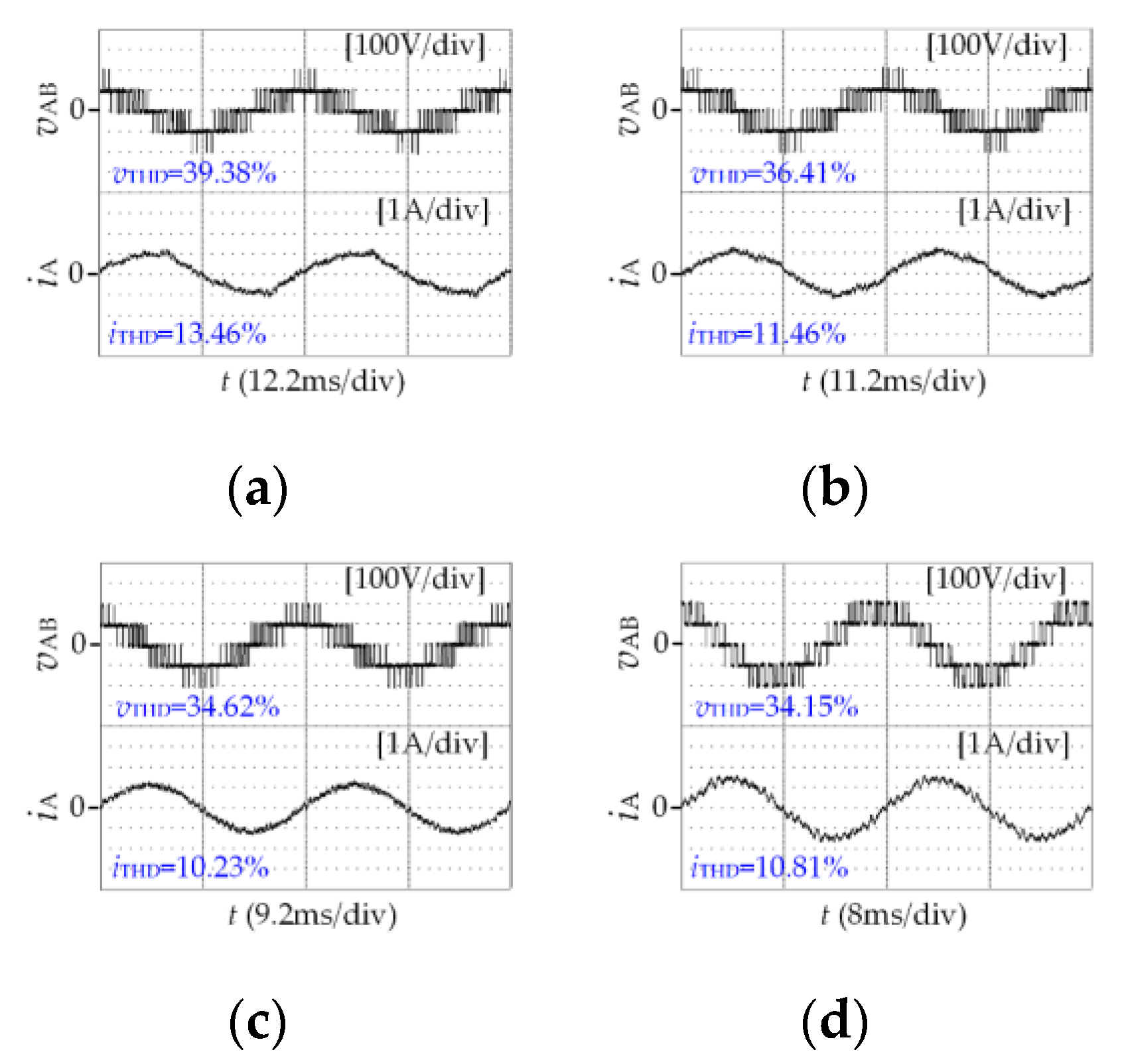
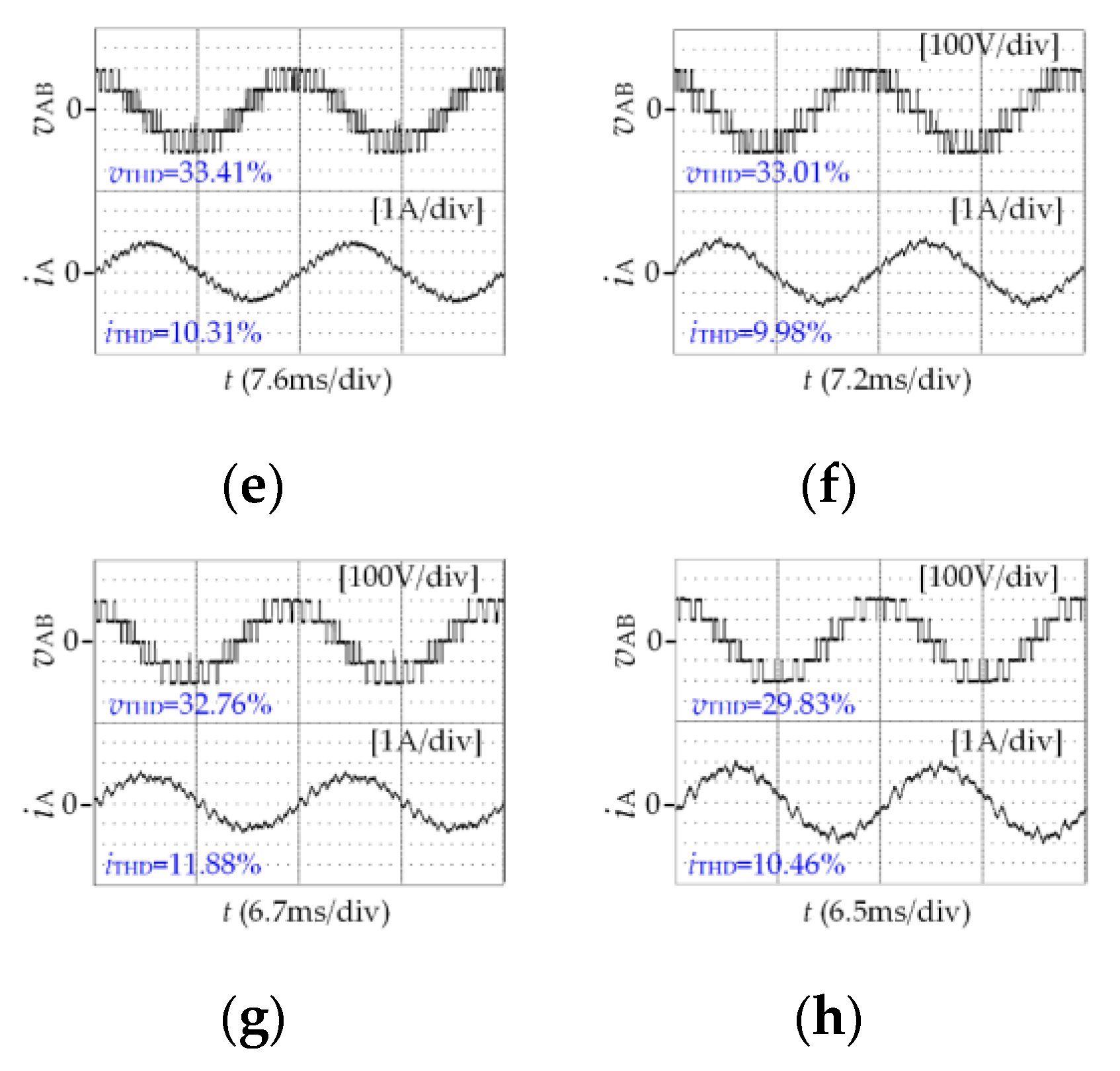
5.4. Output Waveform Quality
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Switching frequency | fs |
| Output fundamental frequency | fe |
| Pulse number | P |
| Complex compensation gain | k |
| Phase current | iX, X∈{A, B, C}. |
| Reference voltage vector | Vref |
| reference voltage vector phase angle | θ |
| Sub-cycle times | TS |
| Modulation index | m |
| Stator flux vector | ψS |
| Stator flux trajectories change rate | ΔψS |
| Voltage total harmonic distortion | vTHD |
| Current total harmonic distortion | iTHD |
References
- Zhang, G.; Su, Y.; Zhou, Z.; Geng, Q. A Carrier-Based Discontinuous PWM Strategy of NPC Three-Level Inverter for Common-Mode Voltage and Switching Loss Reduction. Electronics 2021, 10, 3041. [Google Scholar] [CrossRef]
- Ouanjli, N.E.; Derouich, A.; Ghzizal, A.E.; Taoussi, M.; Bossoufi, B. Direct Torque Control of Doubly Fed Induction Motor Using Three-Level NPC Inverter. Prot. Control Mod. Power Syst. 2019, 4, 17. [Google Scholar] [CrossRef] [Green Version]
- Saady, I.; Karim, M.; Bossoufi, B.; Ouanjli, N.E.; Motahhir, S.; Majout, B. Optimization and Control of Photovoltaic Water Pumping System Using Kalman Filter Based MPPT and Multilevel Inverter Fed DTC-IM. Results Eng. 2023, 17, 100829. [Google Scholar] [CrossRef]
- Alawieh, H.; Tehrani, K.A.; Azzouz, Y.; Dakyo, B. A New Active Common-Mode Voltage Elimination Method for Three-Level Neutral-Point Clamped Inverters. In Proceedings of the Conference of the IEEE Industrial Electronics Society (IECON), Dallas, TX, USA, 29 October–1 November 2014; pp. 1060–1066. [Google Scholar]
- Ma, Z.; Niu, H.; Wu, X.; Zhang, X.; Lin, G. An Improved Overmodulation Strategy for a Three-Level NPC Inverter Considering Neutral-Point Voltage Balance and Common-Mode Voltage Suppression. Sustainability 2022, 14, 12558. [Google Scholar] [CrossRef]
- Ahmadi, S.; Poure, P.; Khaburi, D.A.; Saadate, S. A Remedial Control for Short-Circuit Fault in NPC/H-Bridge Inverters without Redundant Component. Electronics 2021, 10, 2411. [Google Scholar] [CrossRef]
- Tehrani, K.A.; Bendjedia, M.; Azzouz, Y. Design of RST and Fractional Order PID Controllers for an Induction Motor Drive for Electric Vehicle Application. In Proceedings of the IET International Conference on Power Electronics, Manchester, UK, 8–10 April 2014. [Google Scholar]
- Szular, Z.; Rozegnal, B.; Mazgaj, W.A. New Soft-Switching Solution in Three-Level Neutral-Point-Clamped Voltage Source Inverters. Energies 2021, 14, 2247. [Google Scholar] [CrossRef]
- Rathore, R.; Holtz, J.; Boller, T. Generalized Optimal Pulsewidth Modulation of Multilevel Inverters for Low-Switching-Frequency Control of Medium-Voltage High-Power Industrial AC Drives. IEEE Trans. Ind. Appl. 2013, 60, 4215–4224. [Google Scholar] [CrossRef]
- Zhang, G.; Peng, S.; Geng, Q.; Shi, T.; Xia, C. Hybrid Discontinuous Space Vector PWM Strategy for Three-Level Inverters Under Two-Phase Loads Condition. IEEE Trans. Power Electron. 2021, 37, 1711–1721. [Google Scholar] [CrossRef]
- Gao, Z.; Ge, Q.; Li, Y.; Zhao, L.; Zhang, B.; Wang, K. Hybrid Improved Carrier-Based PWM Strategy for Three-Level Neutral-Point-Clamped Inverter With Wide Frequency Range. IEEE Trans. Power Electron. 2021, 36, 8517–8538. [Google Scholar] [CrossRef]
- Fei, W.; Du, X.; Wu, B. A Generalized Half-Wave Symmetry SHE-PWM Formulation for Multilevel Voltage Inverters. IEEE Trans. Ind. Electron. 2010, 57, 3030–3038. [Google Scholar]
- Memon, M.A.; Mekhilef, S.; Mubin, M.; Aamir, M. Selective Harmonic Elimination in Inverters Using Bio-Inspired Intelligent Algorithms for Renewable Energy Conversion Applications: A Review. Renew. Sustain. Energy Rev. 2018, 82, 2235–2253. [Google Scholar] [CrossRef]
- Zhang, Z.; Ge, X.; Tian, Z.; Zhang, X.; Tang, Q.; Fang, X. A PWM for Minimum Current Harmonic Distortion in Metro Traction PMSM With Saliency Ratio and Load Angle Constrains. IEEE Trans. Power Electron. 2018, 33, 4498–4511. [Google Scholar] [CrossRef]
- He, K.; Li, J.; Xiao, L.; Xiong, Y.; Wu, L. Randomized Pulse Pattern Strategy of Synchronized SVPWM for Low-Frequency-Ratio Applications. IEEE Trans. Power Electron. 2021, 36, 6404–6414. [Google Scholar] [CrossRef]
- Zhang, G.; Wei, B.; Gu, X.; Li, M.; Zhou, Z.; Chen, W. Sector Subdivision Based SVPWM Strategy of Neutral-Point-Clamped Three-Level Inverter for Current Ripple Reduction. Energies 2019, 12, 2734. [Google Scholar] [CrossRef] [Green Version]
- Mo, X.; Huang, K.; Fan, H.; Wu, H.; Chen, L. Segmented Multi-mode Modulation Algorithm Based on Synchronized SVPWM for Rail Transit Traction Motor. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar]
- Zhou, M.; Liu, W.; Qiu, T.; Wang, C.; You, X. A Genaral Switching Strategy for Multi-Mode Pulse Width Modulation. Proc. CSEE 2019, 39, 2125–2132. [Google Scholar]
- Chu, Y.; Zhou, M.; Dong, S.; Wang, C.; Wang, B. A General Switching Strategy of Multimode Modulation Based on Flux Deviation Vector. Proc. CSEE 2022, 42, 4162–4170. [Google Scholar]
- Wang, C.; Wang, K.; You, X. Research on Synchronized SVPWM Strategies Under Low Switching Frequency for Six-Phase VSI-Fed Asymmetrical Dual Stator Induction Machine. IEEE Trans. Power Electron. 2016, 63, 6767–6776. [Google Scholar] [CrossRef]
- Wang, K.; You, X.; Wang, C.; Zhou, M. Research on Synchronized SVPWM Strategies Under Low Switching Frequency. Proc. CSEE 2015, 35, 4175–4183. [Google Scholar]
- Zhang, G.; Zhou, Z.; Shi, T.; Xia, C. An Improved Multimode Synchronized Space Vector Modulation Strategy for High-Power Medium-Voltage Three-Level Inverter. IEEE Trans. Power Electron. 2020, 36, 4686–4696. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Device | Switch Status | Phase Voltage | |||
|---|---|---|---|---|---|
| SX1 | SX2 | SX3 | SX4 | ||
| 1 | 1 | 0 | 0 | P | Vdc/2 |
| 0 | 1 | 1 | 0 | O | 0 |
| 0 | 0 | 1 | 1 | N | −Vdc/2 |
| Synchronization | Three-Phase Symmetry | Half-Wave Symmetry | ||
|---|---|---|---|---|
| θ | θ ± 2π | θ + 2/3π | θ − 2/3π | θ ± π |
| Sa | Sa | Sc | Sb | |
| Sb | Sb | Sa | Sc | |
| Sc | Sc | Sb | Sa | |
| Pulse Number Change during Switching | Complex Compensation Gain k | The Compensated Vref Phase Angle |
|---|---|---|
| SSVM_15→SSVM_13 | k15_13 = ej−2.06° | 60°·n − 57.7° |
| SSVM_13→SSVM_11 | k13_11 = ej3.14° | 60°·n − 57.5° |
| SSVM_11→SSVM_9 | k11_9 = ej0.03° | 60°·n − 56.5° |
| SSVM_9→SSVM_7 | k9_7 = ej−0.6° | 60°·n − 55.6° |
| SSVM_7→SSVM_5 | k7_5 = ej0.85° | 60°·n − 55° |
| SSVM_5→SSVM_7 | k5_7 = ej−0.82° | 60°·n − 54° |
| SSVM_7→SSVM_9 | k7_9 = ej0.69° | 60°·n − 55° |
| SSVM_9→SSVM_11 | k9_11 = ej−0.06° | 60°·n − 55.6° |
| SSVM_11→SSVM_13 | k11_13 = ej−4.1° | 60°·n − 56.5° |
| SSVM_13→SSVM_15 | k13_15 = ej2.27° | 60°·n − 57.5° |
| Parameters | Values |
|---|---|
| DC-link voltage Vdc/V | 200 |
| Rated power P/kW | 7.5 |
| Rated frequency fN/Hz | 50 |
| Rated current IN/A | 17.8 |
| Rated speed nN/(r/min) | 720 |
| Number of pole pairs p/pairs | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Zhao, G.; Li, C.; Li, X.; Gu, X. Smooth Switching Method for Multi-Mode Synchronous Space Vector Modulation of NPC Three-Level Inverter. World Electr. Veh. J. 2023, 14, 62. https://doi.org/10.3390/wevj14030062
Zhang G, Zhao G, Li C, Li X, Gu X. Smooth Switching Method for Multi-Mode Synchronous Space Vector Modulation of NPC Three-Level Inverter. World Electric Vehicle Journal. 2023; 14(3):62. https://doi.org/10.3390/wevj14030062
Chicago/Turabian StyleZhang, Guozheng, Guoao Zhao, Chen Li, Xinmin Li, and Xin Gu. 2023. "Smooth Switching Method for Multi-Mode Synchronous Space Vector Modulation of NPC Three-Level Inverter" World Electric Vehicle Journal 14, no. 3: 62. https://doi.org/10.3390/wevj14030062
APA StyleZhang, G., Zhao, G., Li, C., Li, X., & Gu, X. (2023). Smooth Switching Method for Multi-Mode Synchronous Space Vector Modulation of NPC Three-Level Inverter. World Electric Vehicle Journal, 14(3), 62. https://doi.org/10.3390/wevj14030062