

Direct Instantaneous Torque Control of SRM Based on a Novel Multilevel Converter for Low Torque Ripple

Abstract
:1. Introduction
2. Conventional DITC for SRM
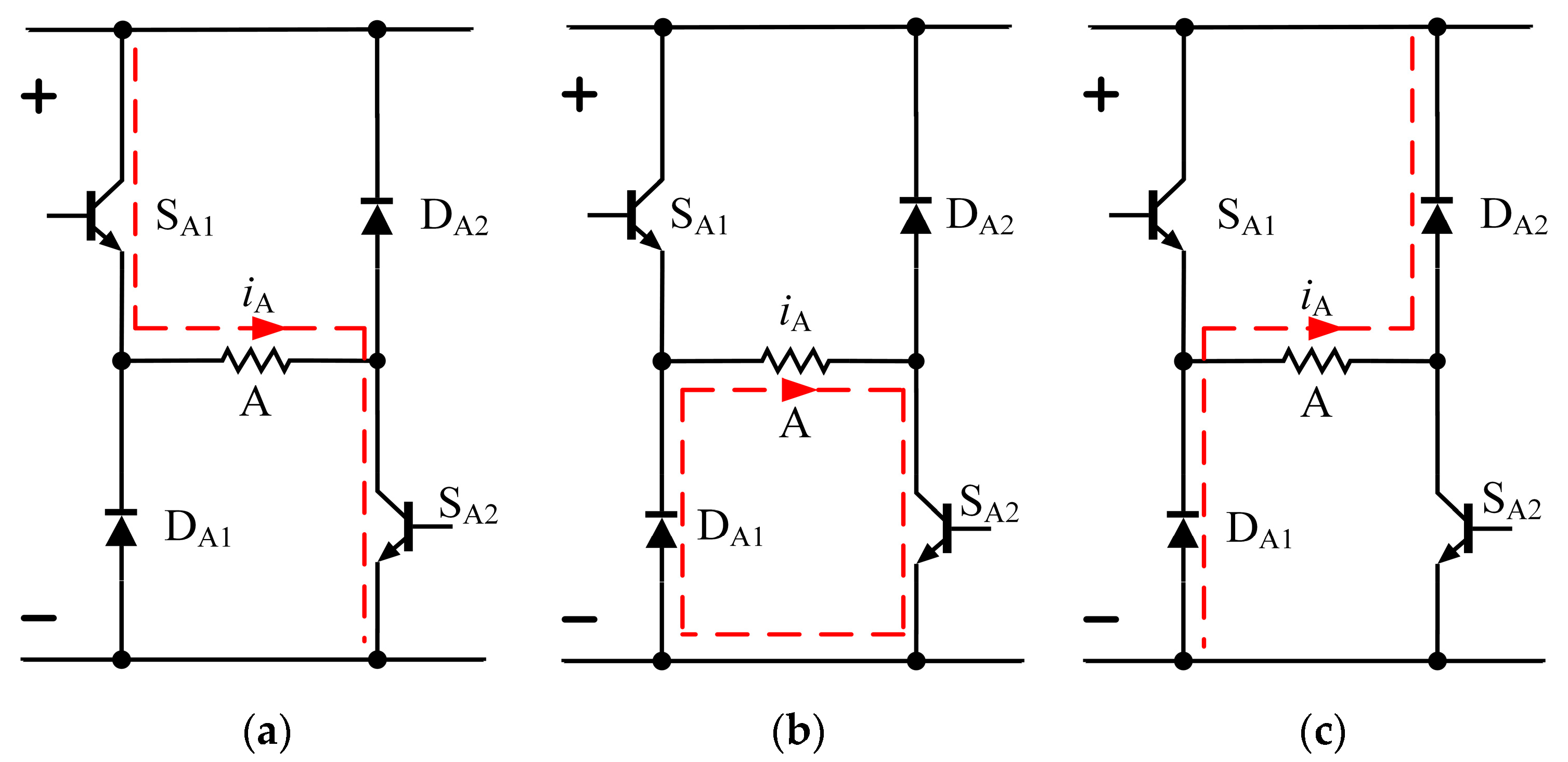
2.1. Asymmetrical Half-Bridge Converter
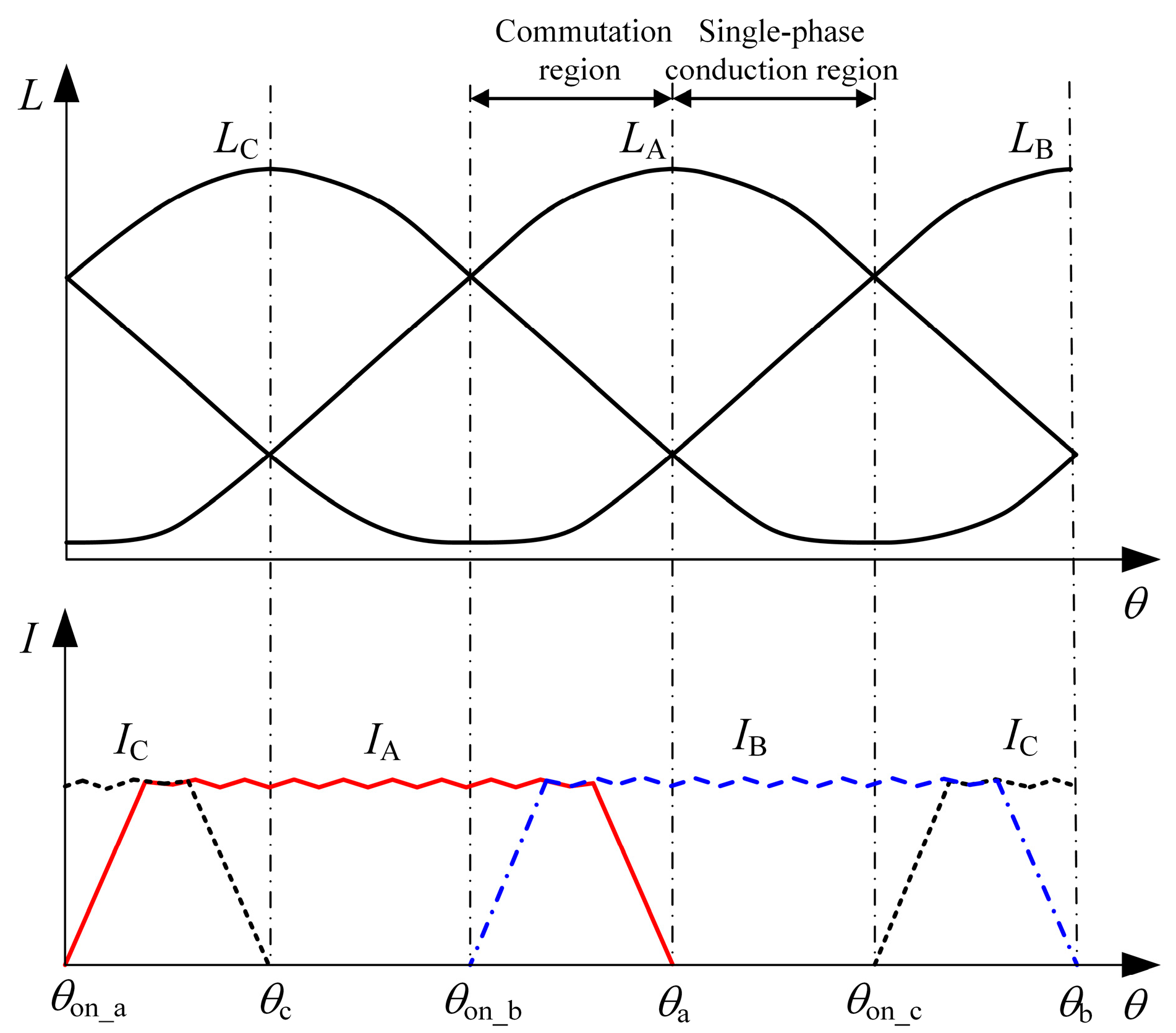
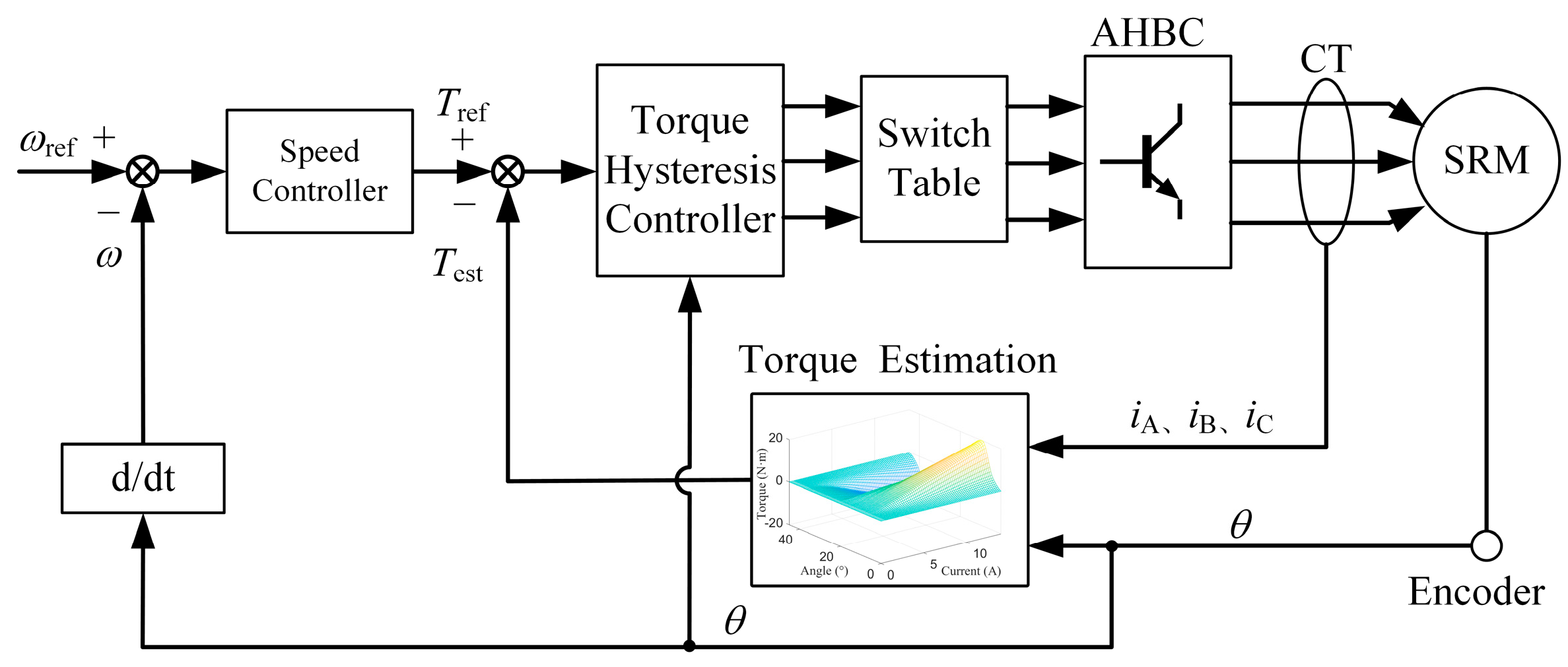
2.2. Conventional DITC System and Control Method for SRM
3. Novel Multilevel Converter
4. DITC for SRMs with the Novel Multilevel Converter
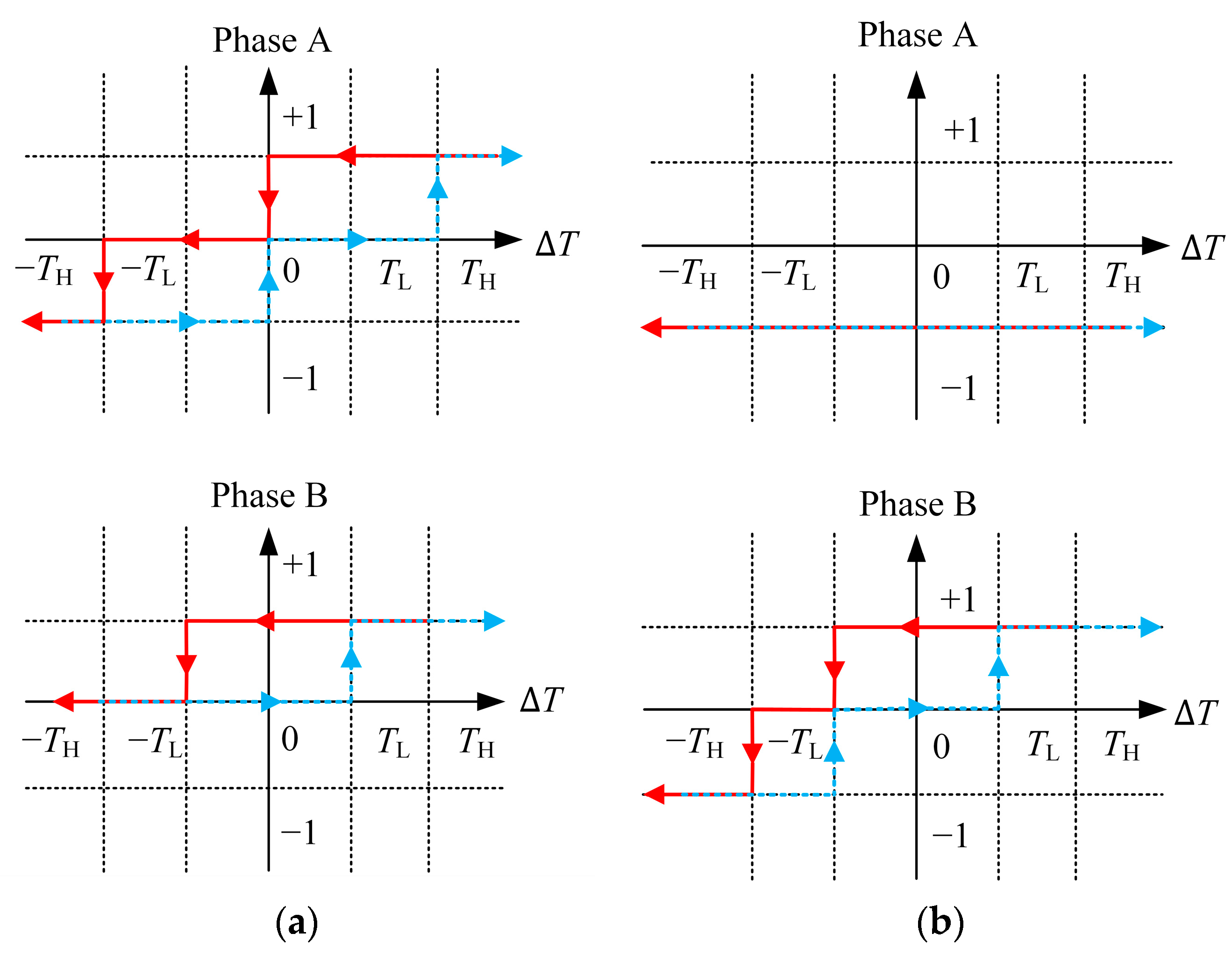
4.1. Torque Hysteresis Control Strategy with the Novel Multilevel Converter
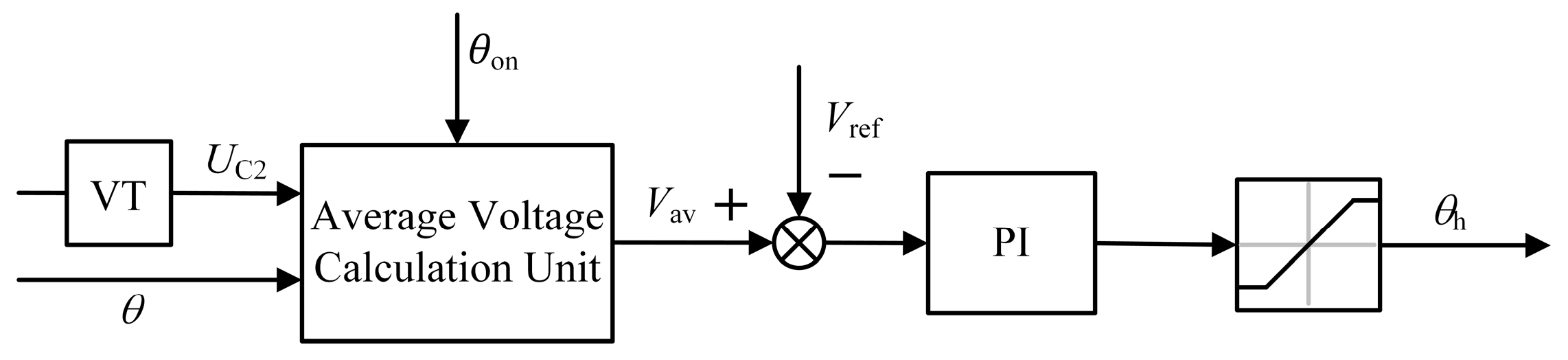
4.2. Stability Control of the High-Voltage Bus Voltage
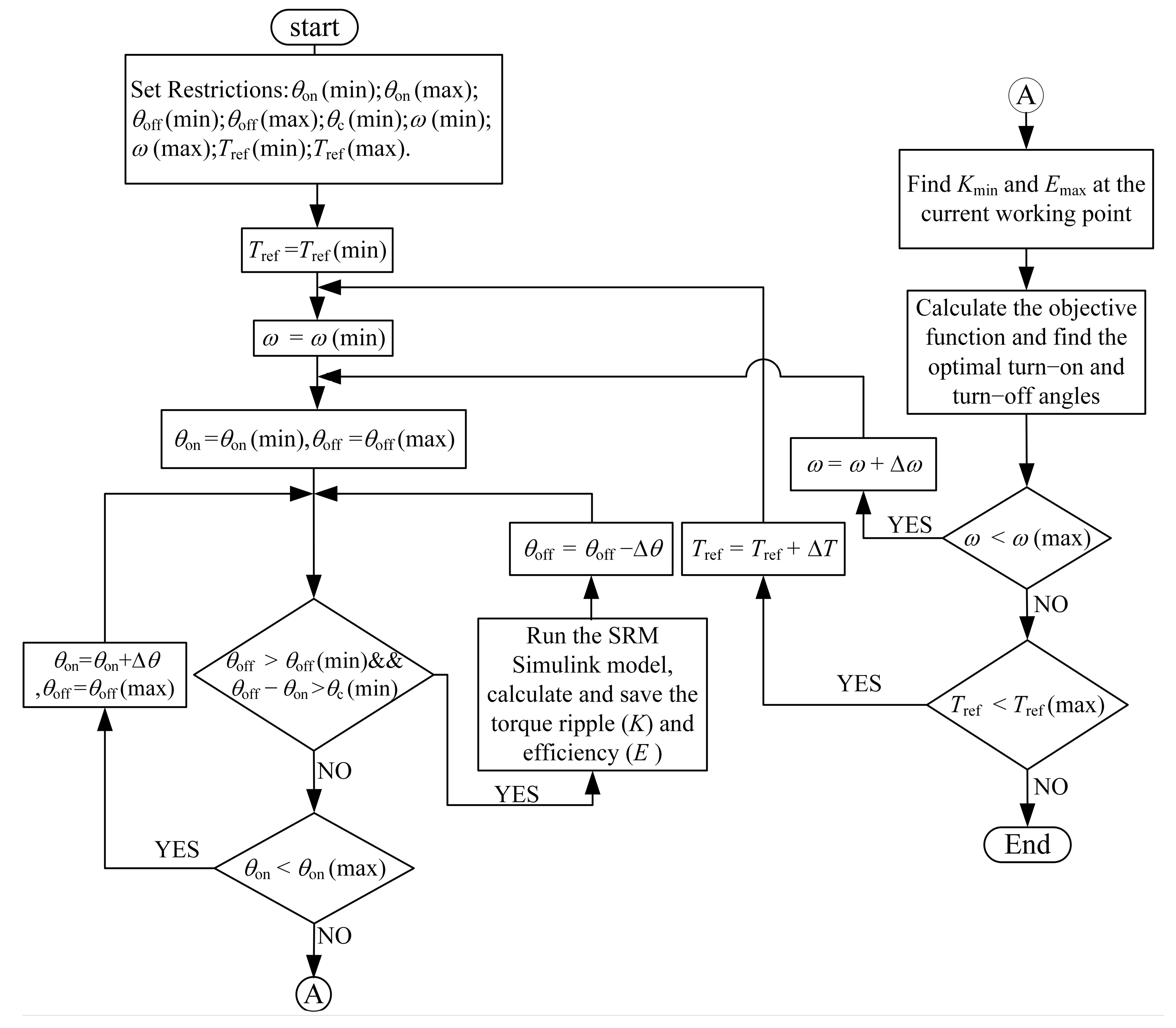
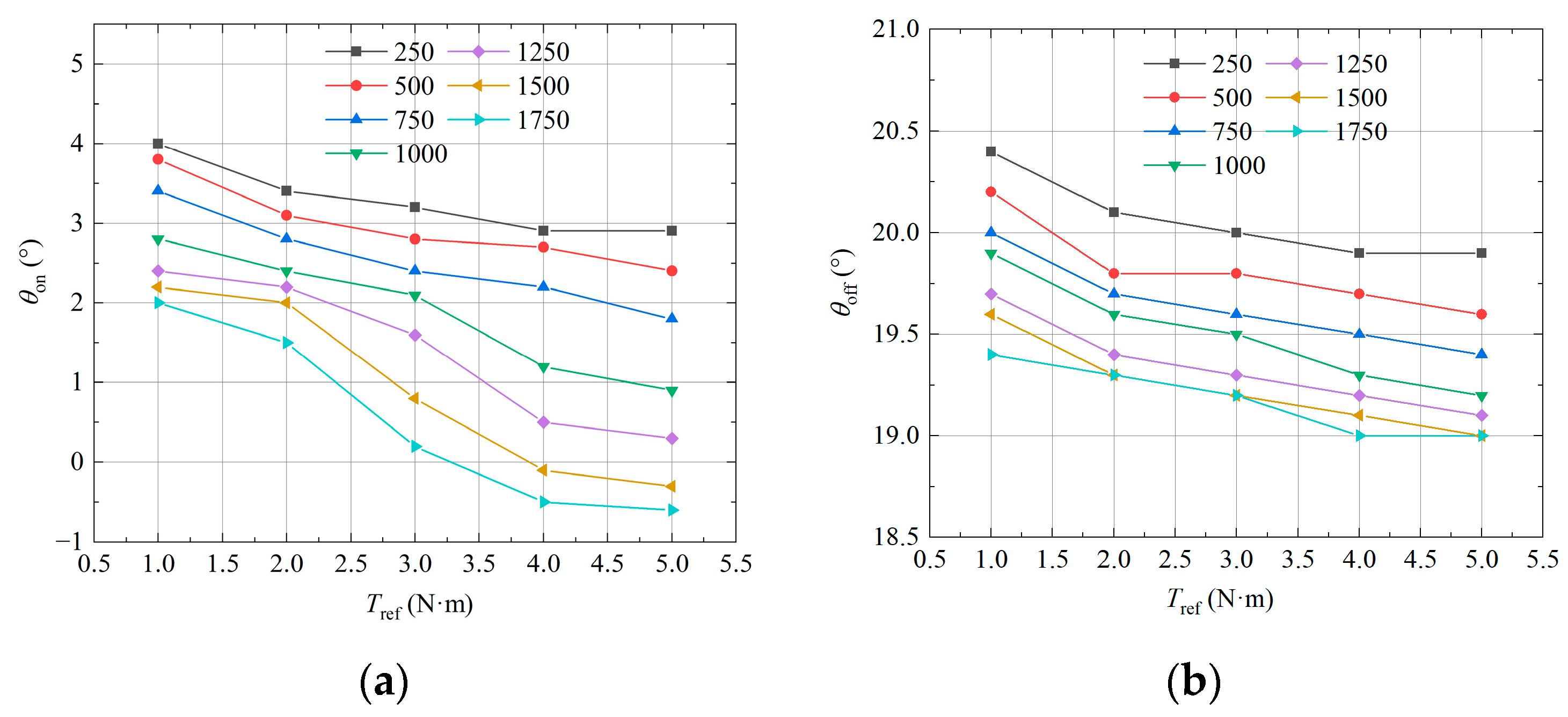
4.3. Optimization of Control Parameters
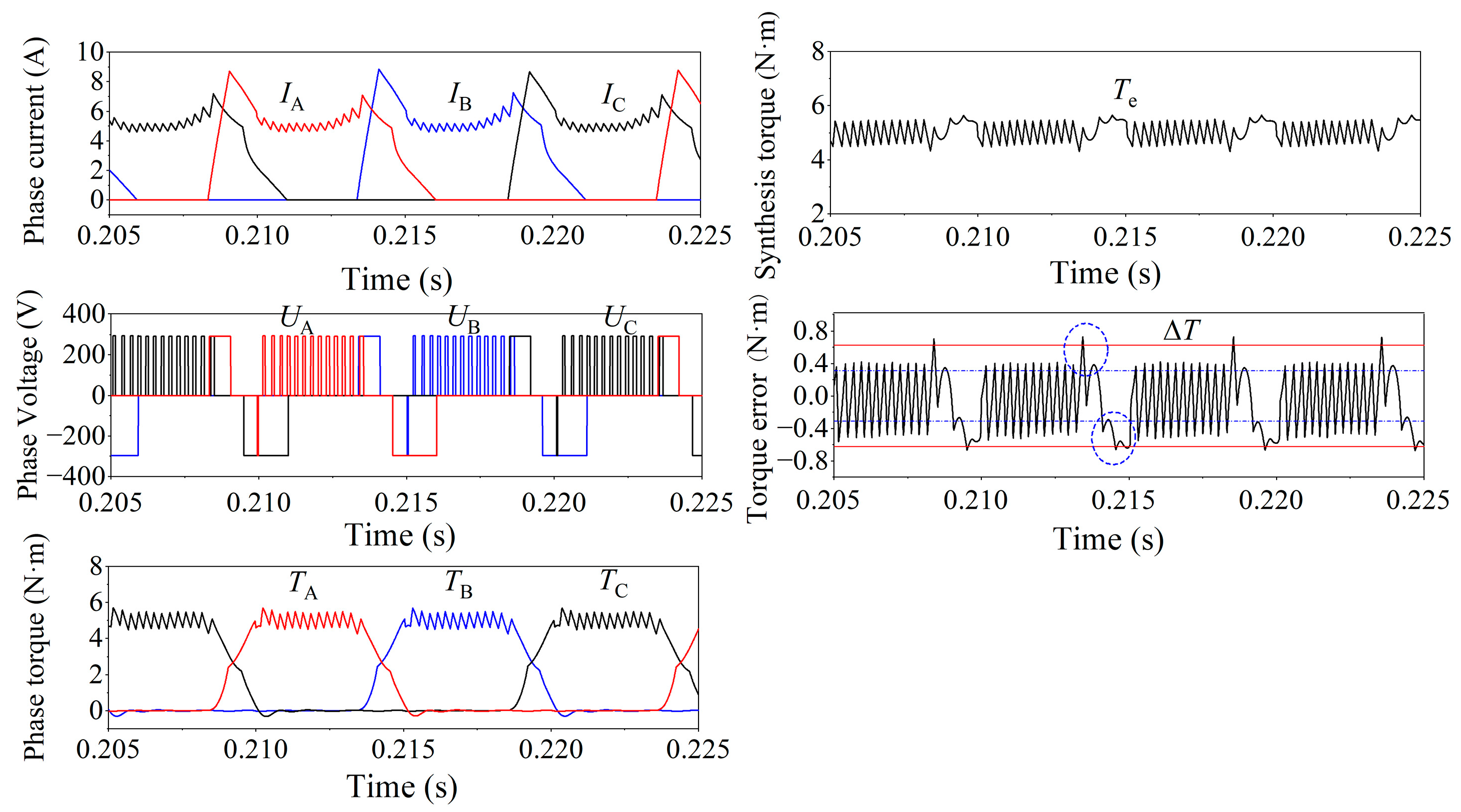
5. Simulation Analysis
6. Experimental Verification
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aiso, K.; Akatsu, K. Performance Comparison of High-Speed Motors for Electric Vehicle. World Electr. Veh. J. 2022, 13, 57. [Google Scholar] [CrossRef]
- Lan, Y.; Benomar, Y.; Deepak, K.; Aksoz, A.; Baghdadi, M.E.; Bostanci, E.; Hegazy, O. Switched Reluctance Motors and Drive Systems for Electric Vehicle Powertrains: State of the Art Analysis and Future Trends. Energies 2021, 14, 2079. [Google Scholar] [CrossRef]
- Wang, Z.; Ching, T.W.; Huang, S.; Wang, H.; Xu, T. Challenges Faced by Electric Vehicle Motors and Their Solutions. IEEE Access 2021, 9, 5228–5249. [Google Scholar] [CrossRef]
- Vosswinkel, M.; Lohner, A.; Platte, V.; Hirche, T. Design, Production, and Verification of a Switched-Reluctance Wheel Hub Drive Train for Battery Electric Vehicles. World Electr. Veh. J. 2019, 10, 82. [Google Scholar] [CrossRef]
- Faria, C.T.; Santos, F.; Chauvicourt, F.; Orlando, S. Noise Emissions on Switched Reluctance Motors: Evaluation of Different Structural Models. World Electr. Veh. J. 2015, 7, 179–186. [Google Scholar] [CrossRef]
- Kusumi, T.; Hara, T.; Umetani, K.; Hiraki, E. Phase-current Waveform for Switched Reluctance Motors to Eliminate Input-current Ripple and Torque Ripple in Low-power Propulsion below Magnetic Saturation. IET Power Electron. 2020, 13, 3351–3359. [Google Scholar] [CrossRef]
- Dorneles Callegaro, A.; Liang, J.; Jiang, J.W.; Bilgin, B.; Emadi, A. Radial Force Density Analysis of Switched Reluctance Machines: The Source of Acoustic Noise. IEEE Trans. Transp. Electrific. 2019, 5, 93–106. [Google Scholar] [CrossRef]
- Qiao, W.; Han, S.; Diao, K.; Sun, X. Optimization Design and Control of Six-Phase Switched Reluctance Motor with Decoupling Winding Connections. Appl. Sci. 2022, 12, 8801. [Google Scholar] [CrossRef]
- Choi, Y.K.; Yoon, H.S.; Koh, C.S. Pole-Shape Optimization of a Switched-Reluctance Motor for Torque Ripple Reduction. IEEE Trans. Magn. 2007, 43, 1797–1800. [Google Scholar] [CrossRef]
- Abunike, C.E.; Okoro, O.I.; Aphale, S.S. Intelligent Optimization of Switched Reluctance Motor Using Genetic Aggregation Response Surface and Multi-Objective Genetic Algorithm for Improved Performance. Energies 2022, 15, 6086. [Google Scholar] [CrossRef]
- De Paula, M.V.; Williamson, S.S.; Barros, T.A. Four-Quadrant Model Following Sliding Mode Cruise Control for SRM With DITC Applied to Transportation Electrification. IEEE Trans. Transp. Electrif. 2022, 8, 3090–3099. [Google Scholar] [CrossRef]
- De Paula, M.V.; Barros, T.A.; Moreira, H.S.; Catata, E.O.H.; Villalva, M.G.; Filho, E.R. A Dahlin Cruise Control Design Method for Switched Reluctance Motors With Minimum Torque Ripple Point Tracking Applied in Electric Vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 730–740. [Google Scholar] [CrossRef]
- Song, S.; Huang, S.; Zhao, Y.; Zhao, X.; Duan, X.; Ma, R.; Liu, W. Torque Ripple Reduction of Switched Reluctance Machine With Torque Distribution and Online Correction. IEEE Trans. Ind. Electron. 2023, 70, 8842–8852. [Google Scholar] [CrossRef]
- Hannoun, H.; Hilairet, M.; Marchand, C. Design of an SRM Speed Control Strategy for a Wide Range of Operating Speeds. IEEE Trans. Ind. Electron. 2010, 57, 2911–2921. [Google Scholar] [CrossRef]
- Hamouda, M.; Abdel Menaem, A.; Rezk, H.; Ibrahim, M.N.; Számel, L. Comparative Evaluation for an Improved Direct Instantaneous Torque Control Strategy of Switched Reluctance Motor Drives for Electric Vehicles. Mathematics 2021, 9, 302. [Google Scholar] [CrossRef]
- Fang, G.; Pinarello Scalcon, F.; Xiao, D.; Vieira, R.; Grundling, H.; Emadi, A. Advanced Control of Switched Reluctance Motors (SRMs): A Review on Current Regulation, Torque Control and Vibration Suppression. IEEE Open J. Ind. Electron. Soc. 2021, 2, 280–301. [Google Scholar] [CrossRef]
- Gribble, J.J.; Kjaer, P.C.; Miller, T.J.E. Optimal Commutation in Average Torque Control of Switched Reluctance Motors. IEE Proc. -Electr. Power Appl. 1999, 146, 2–10. [Google Scholar] [CrossRef]
- Usman Jamil, M.; Kongprawechnon, W.; Chayopitak, N. Average Torque Control of a Switched Reluctance Motor Drive for Light Electric Vehicle Applications. IFAC-PapersOnLine 2017, 50, 11535–11540. [Google Scholar] [CrossRef]
- Hamouda, M.; Szamel, L.; Alquraan, L. Maximum Torque per Ampere Based Indirect Instantaneous Torque Control for Switched Reluctance Motor. In Proceedings of the 2019 International IEEE Conference and Workshop in Óbuda on Electrical and Power Engineering (CANDO-EPE), Budapest, Hungary, 20–21 November 2019; pp. 47–54. [Google Scholar]
- Cai, H.; Wang, H.; Li, M.; Shen, S.; Feng, Y.; Zheng, J. Torque Ripple Reduction for Switched Reluctance Motor with Optimized PWM Control Strategy. Energies 2018, 11, 3215. [Google Scholar] [CrossRef]
- Ye, J.; Bilgin, B.; Emadi, A. An Offline Torque Sharing Function for Torque Ripple Reduction in Switched Reluctance Motor Drives. IEEE Trans. Energy Convers. 2015, 30, 726–735. [Google Scholar] [CrossRef]
- Qi, H.; Zhang, T.; Li, Z.; Wei, Y. SRM Torque Ripple Minimization Based on Direct Instantaneous Torque Control. Trans. China Electrotech. Soc. 2007, 7, 136–140. [Google Scholar]
- Inderka, R.B.; De Doncker, R.W.A.A. DITC-Direct Instantaneous Torque Control of Switched Reluctance Drives. IEEE Trans. Ind. Appl. 2003, 39, 1046–1051. [Google Scholar] [CrossRef]
- De Paula, M.V.; Barros, T.A. A Sliding Mode DITC Cruise Control for SRM With Steepest Descent Minimum Torque Ripple Point Tracking. IEEE Trans. Ind. Electron. 2022, 69, 151–159. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Ho, S.L. Optimization and Evaluation of Torque-Sharing Functions for Torque Ripple Minimization in Switched Reluctance Motor Drives. IEEE Trans. Power Electron. 2009, 24, 2076–2090. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, M.; Yuan, X.; Ruan, Y. Direct Instantaneous Torque Control System for Switched Reluctance Motor in Electric Vehicles. J. Eng. 2019, 16, 1847–1852. [Google Scholar] [CrossRef]
- Von Hoegen, A.; Woerndle, A.; De Doncker, R.W. Implementation of PWM-Based Direct Instantaneous Torque Control with Duty Cycle Interlock for a Switched Reluctance Machine. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 754–759. [Google Scholar]
- Zhu, Y.; Zhang, G.; Huang, Y. PWM-Based Direct Instantaneous Torque Control of Switched Reluctance Machine. Trans. China Electrotech. Soc. 2017, 32, 31–39. [Google Scholar]
- Cheng, Y.; Cao, X.-X.; Zhang, Y.-L. Hysteresis-PWM Direct Instantaneous Torque Control of Switched Reluctance Motor. Electr. Mach. Control 2020, 24, 74–82. [Google Scholar]
- Sun, Q.; Wu, J.; Gan, C. Optimized Direct Instantaneous Torque Control for SRM with Efficiency Improvement. IEEE Trans. Ind. Electron. 2021, 68, 2072–2082. [Google Scholar] [CrossRef]
- Li, Z.; Wei, Y.; Kan, Z.; Qi, H. Direct Instantaneous Torque Control of SRM Using Four-Level Converter. Trans. China Electrotech. Soc. 2007, 22, 144–149. [Google Scholar]
- Sun, Q.; Wu, J.; Gan, C.; Shen, M.; Wang, J.; Sun, H. Multi-Level Converter-Based Torque Sharing Function Control Strategy for Switched Reluctance Motors. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Parameters | Values |
|---|---|
| Number of stator/rotor poles | 12/8 |
| Rated voltage | 295 V |
| Rated power | 1.1 kW |
| Rated speed | 2000 r/min |
| Rated load | 5.25 N·m |
| Speed (r/min) | Load (N·m) | K (Conventional DITC) (%) | K (Novel DITC) (%) |
|---|---|---|---|
| 250 | 2 | 23.3 | 23.2 |
| 500 | 2 | 24.1 | 23.2 |
| 750 | 2 | 27.6 | 23.4 |
| 1000 | 2 | 28.1 | 25.1 |
| 1250 | 2 | 29.3 | 25.5 |
| 1500 | 2 | 31.6 | 25 |
| 1750 | 2 | 47 | 26.2 |
| Speed (r/min) | Load (N·m) | K (Conventional DITC) (%) | K (Novel DITC) (%) |
|---|---|---|---|
| 250 | 5 | 22.6 | 20.4 |
| 500 | 5 | 27.6 | 22 |
| 750 | 5 | 30.3 | 23.2 |
| 1000 | 5 | 32.7 | 23.7 |
| 1250 | 5 | 34.4 | 25.6 |
| 1500 | 5 | 42.8 | 27.8 |
| 1750 | 5 | 73.7 | 36.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Dong, Z.; Liu, H.; Liu, Y.; Wu, Y. Direct Instantaneous Torque Control of SRM Based on a Novel Multilevel Converter for Low Torque Ripple. World Electr. Veh. J. 2023, 14, 140. https://doi.org/10.3390/wevj14060140
Cai Y, Dong Z, Liu H, Liu Y, Wu Y. Direct Instantaneous Torque Control of SRM Based on a Novel Multilevel Converter for Low Torque Ripple. World Electric Vehicle Journal. 2023; 14(6):140. https://doi.org/10.3390/wevj14060140
Chicago/Turabian StyleCai, Yan, Zhongshan Dong, Hui Liu, Yunhu Liu, and Yuhang Wu. 2023. "Direct Instantaneous Torque Control of SRM Based on a Novel Multilevel Converter for Low Torque Ripple" World Electric Vehicle Journal 14, no. 6: 140. https://doi.org/10.3390/wevj14060140
APA StyleCai, Y., Dong, Z., Liu, H., Liu, Y., & Wu, Y. (2023). Direct Instantaneous Torque Control of SRM Based on a Novel Multilevel Converter for Low Torque Ripple. World Electric Vehicle Journal, 14(6), 140. https://doi.org/10.3390/wevj14060140