1. Introduction
Power processing is the most critical activity in electric and electronic systems, and one device most used for this purpose is the DC/DC power converter. Power converters are used to drive DC sources, storage devices, and loads. Moreover, power converters require a controller for safely performing power processing tasks. Due to the wide range of controllers reported in the literature, evaluating functional and non-functional characteristics to choose the most suitable one for an industrial system is of significant relevance [
1].
It is crucial to have performance criteria for controllers because they provide an objective way to assess the quality of their work. The evaluation criteria for DC/DC power converter controllers include factors such as precision of voltage regulation, system stability, efficiency, load-carrying capacity, and dynamic response [
2,
3,
4,
5]. They can also have advanced features such as overcurrent and overvoltage protection to ensure safe and reliable system operation. Moreover, some non-functional characteristics such as size, cost, and computational burden should be considered.
The viability of implementing a solution in control theory is a problem that can be solved if an algorithm with moderate computational requirements exists [
6]. The moderate computational requirements mean that the computational resources (fundamentally processor and memory) that need to solve the problem are within the acceptable costs. Being inside these limits facilitates implementation and helps in reaching the system performance specifications [
7]. The acronyms used here are summarized in
Table 1.
The high complexity of the current systems requires the development of advanced control strategies to achieve the performance demanded by the application. These control strategies, in turn, require devices with high power processing, thus raising energy consumption and increasing the heat dissipation and costs. In order to develop cheaper solutions, with small and efficient implementations, it is necessary to reduce the computational burden of the control strategies without significantly impacting the response accuracy; for this, it is useful to simplify the models to reduce the number of differential equations, replace some dynamic equations with lookup tables, linearize some nonlinear relations, or eliminate redundant calculations. In the particular case of power converter control, strategies frequently used, apart from classical proportional–integral–derivative (PID) topologies, are model predictive control (MPC), robust control, and adaptive control, whose implementations are generally complex and produce a significant computational burden. Some works found in reviews of the state of the art implement those controllers, but there are few reported attempts to reduce the computational burden.
For example, in [
8], the computational burden of a conventional finite control set MPC applied to a T-type 3P-3L (three-phase three-level) converter is reduced by implementing three improvements: a better optimization method to determine the vector for current tracking without vector enumeration; an algorithm for capacitor charge balance with the aim of obtaining the vector for neutral point potential balance, thus eliminating weight factor; and, finally, introducing a hybrid vector output mode to give full consideration to current tracking and neutral point potential balance. With these changes in the algorithm, it an improvement factor of 1.6 was achieved in the execution time of the implementation with C-language on the DSP TMS320F28335. However, although the system performance is improved in the solution, the complexity and processor requirements are high. In [
9], the authors implemented a finite control set MPC variant, named fast MPC, applied to a multilevel inverter in a photovoltaic system. In this work, the change in the algorithm avoids testing all possible states of the multilevel converter and evaluate a cost function, reducing the six-factor computation time without effecting the dynamic response (the controller was implemented on a TMS320F28335 DSP). However, the finite control set MPC proposed in that work still executes complex operations, such as Lagrange extrapolation, that still overload the processor.
A method that has recently had a huge boom is deterministic artificial intelligence, which has shown tremendous improvement of performance in systems control compared to nonlinear adaptive methods. For example, some works present the control of the DC motor or the actuator of an unmanned underwater vehicle, where it is evident that the performance improvements are not due to the coefficient estimation but to the modeling methods [
10] and the discretization [
11,
12,
13,
14]. This is why the deterministic artificial intelligence method is highly recommended for applications that require high levels of accuracy, consistency, and precision, such as in power electronics, although in the reviewed works, the controller does not directly control the DC motor driver, namely the power converter. However, these works do not report performance metrics related to computational burden.
A sliding mode controller that requires a processor with high performance is presented in [
15]. The strategy consists of an adaptive-gain/super twisting sliding mode controller applied to two electro-pneumatic actuators, which is a slow system. This work does not evaluate the computational complexity; however, it requires a DS1104 board from DSpace to implement the control law, which is a costly device. Other works show some practical applications utilizing bidirectional buck–boost converters: a high-gain sliding controller in a supercapacitor in [
16], a sliding-mode controller of the electro-mechanical actuator current of an aircraft powered by a supercapacitor in [
17], and in [
18,
19,
20,
21,
22,
23], a current sliding-mode controller accompanied by supervisory control that carries the charge state of the battery, its charge/discharge current, the regulation of the high-voltage side, or maximizes generator current. These works highlight the advantages of these nonlinear controllers, but they do not feature their requirements for hardware, lower [
19] when implemented using an M4 processor, nor their computational burden.
A methodology for combined design of controllers, both adaptive and linear quadratic regulator (LQR), is presented in [
24]. The adaptive controller portion deals with the unknown dynamics of the plant. At the same time, the LQR control, based on a Kalman filter, is used to minimize the effects of the external disturbances. Unfortunately, this work only shows simulations without experimental validation, and there are neither simplifications nor strategies that could decrease the computational burden. Similarly, proposed in [
25] is a combination of adaptive and LQR control for a grid-connected inverter. The current control is frequency-adaptive, while the optimal LQR selects desirable gains for the full-state feedback controller and full-state observer. However, the computational burden of the implementation is high, requiring a DSP TMS320F28335 with a sampling period of 100
s, which is after decreasing the computational requirements by designing a discrete-time observer in the stationary reference frame.
A useful strategy to significantly reduce the computational burden is to perform any optimization process offline; this is, for example, defining the controller adjustments in several operation points before the dynamic behavior takes it there. Therefore, when the system evolves to one of those operations points, the controller parameters must be selected from a table and not dynamically calculated. This solution is reported in some practical cases. For example, the use of a lookup table for power converter control is reported in [
26]; this work proposes two new lookup table methods for a three-level AC/DC converter supplied from the grid. The first method improves the nonlinear direct power control by rotating the orientation of the coordinates; the second method is an improvement of the first in which a new optimal division of the current error plane is introduced, which allows for better voltage vector assignment. Another example is reported in [
27], which proposes a direct power control strategy using a switching table that can simultaneously control both active and reactive power in an electrical grid. It uses an extended p-q theory better suited for unbalanced grid voltages than the original p-q theory. The extended p-q theory is combined with voltage-oriented control to mitigate the influence of grid voltage unbalances. Nevertheless, the disadvantages of direct power control are evident: small scalability, requirement for high synchronization, does not work well with interference, and limited range [
28,
29].
Adaptive lookup table-based variable on-time control is proposed in [
30] for critical mode boost power factor corrector converters, which combines the advantages of both the conventional lookup table method and the real-time calculation method. The paper realizes the adaptability of proposed control within the universal AC input, and the entire load range through a simple linear calculation. Furthermore, the proposed controller reduces the required memory space for variable on-time tables and significantly shortens the computation time, leading to low system cost.
In general, the parameters of PID controllers for nonlinear industrial systems are dynamically tuned using lookup tables. A method based on a cost function to tune the lookup table parameters used in gain-scheduled PID control is proposed in [
31], where the L2 norm is adopted to prevent overlearning. This strategy allows the controller to work at any operation point.
Presented in [
32] is a lookup table of maximun power point tracking (MPPT) algorithm for boost converters in photovoltaic systems, which has lower accuracy than a perturbed and observer (P&O) algorithm but a better response to sudden changes in temperature or irradiance. Instead, the works reported in [
33,
34] describe a digital PID for regulating the voltage on class E buck–boost converter and buck converter, respectively. The compensator is based on a lookup table and implemented with multi-phase digital pulsewidth modulation.
Lookup tables are also used in MPC implementations. For example, ref. [
35] proposes an offline optimization and online lookup table for a two-layer model predictive control to reduce the computational burden. The work examines the properties of computation complexity, steady-state operation, and robustness of the proposed strategy through detailed simulations.
Although the works reported in [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35] use controllers based on a lookup table, none is applied on an adaptive LQR controller nor for a Sepic/Zeta converter-like charger/discharger battery.
A longitudinal movement/optimal controller for heavy-duty vehicles is solved offline in [
36] using a mixed integer quadratic program. Then, if the position is known, those trajectories can be used as lookup tables to find the reference for both velocity and freewheeling. However, this solution does not directly act on the actuators in the vehicle, limiting its accuracy. Another work that does not involve the actuator was reported [
37], in which an adaptive lookup table algorithm is introduced that can accurately and automatically update the static table of an air compressor system. The algorithm has better dynamic performance, such as shorter regulating time and lower overshoot in comparison with the traditional control method (PI + static feedforward strategy).
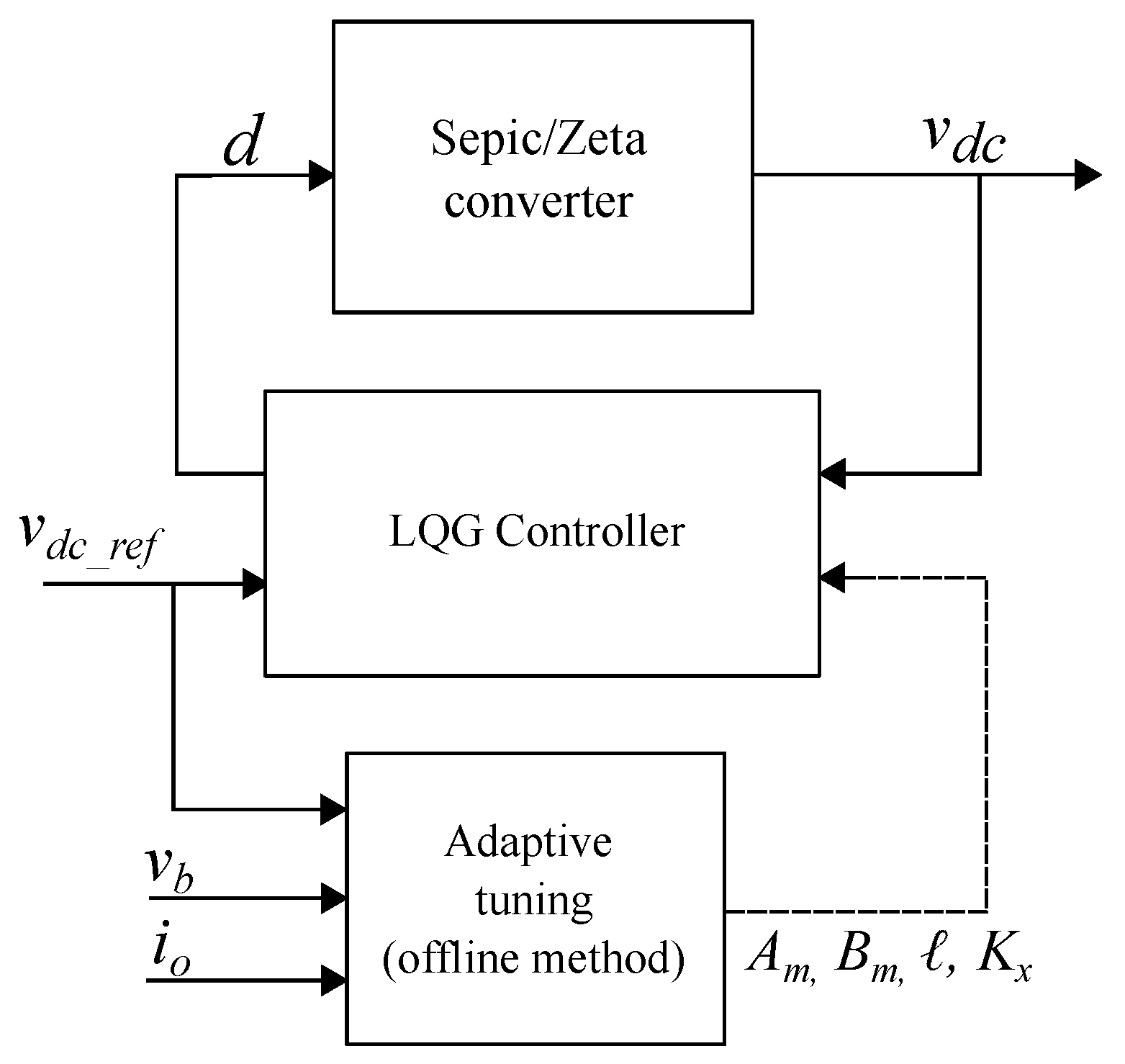
Presented in this paper are similar strategies to reduce the computational burden of complex controllers applied to battery charger/dischargers. In particular, this works focuses on the battery charger/discharger discussed in [
38], which is based on a Sepic/Zeta converter interfacing a battery with the DC bus of a microgrid. The implementation consists of a linear–quadratic–Gaussian (LQG) controller designed to adapt to any operation, with the aim of regulating the DC bus voltage to ensure safe microgrid operation. This controller uses an adaptive law to adjust the controller parameters depending on the operating point; it also requires a full-state observer to reduce the number of sensors, thus reducing the cost. The implementation reported in [
38] has a high computational burden due to the online calculation of both the adaptive part and the observer in which a DSP TMS320F28379D is required for experimental deployment.
Therefore, this work proposes using an offline process to calculate the adaptive controller described in [
38], thus preserving the required operation range. Two methods were designed to calculate the state matrix, calculate the input matrix, and to solve the Ricatti differential equations: the lookup table method and the polynomial interpolation method. The first method requires calculating the matrices, solving the Ricatti equation once for each operating point, and storing the controller parameters in a lookup table. The second method defines a polynomial function representing the changes in the state feedback vector and the observer gain vector. The polynomial degree is defined to achieve a significantly small root mean square error. Both solutions are evaluated using numerical metrics, circuital simulations, and experimental implementations. Moreover, the performance/cost balance is also analyzed and contrasted with the original implementation reported in [
38], which provides a selection guide depending on the charger/discharger requirements in terms of dynamic performance and implementation cost.
This manuscript is divided into five parts:
Section 2 presents the power stage and the mathematical model;
Section 3 presents the design of the adaptive LQG voltage controller, describing the controller processing using both the lookup table and the polynomial interpolation methods.
Section 4 presents a design example and simulation results, and
Section 5 reports the experimental validation, comparison, and discussion of the two solutions. Finally, the conclusions of the work are reported in
Section 6.
2. Modeling of the Power Stage
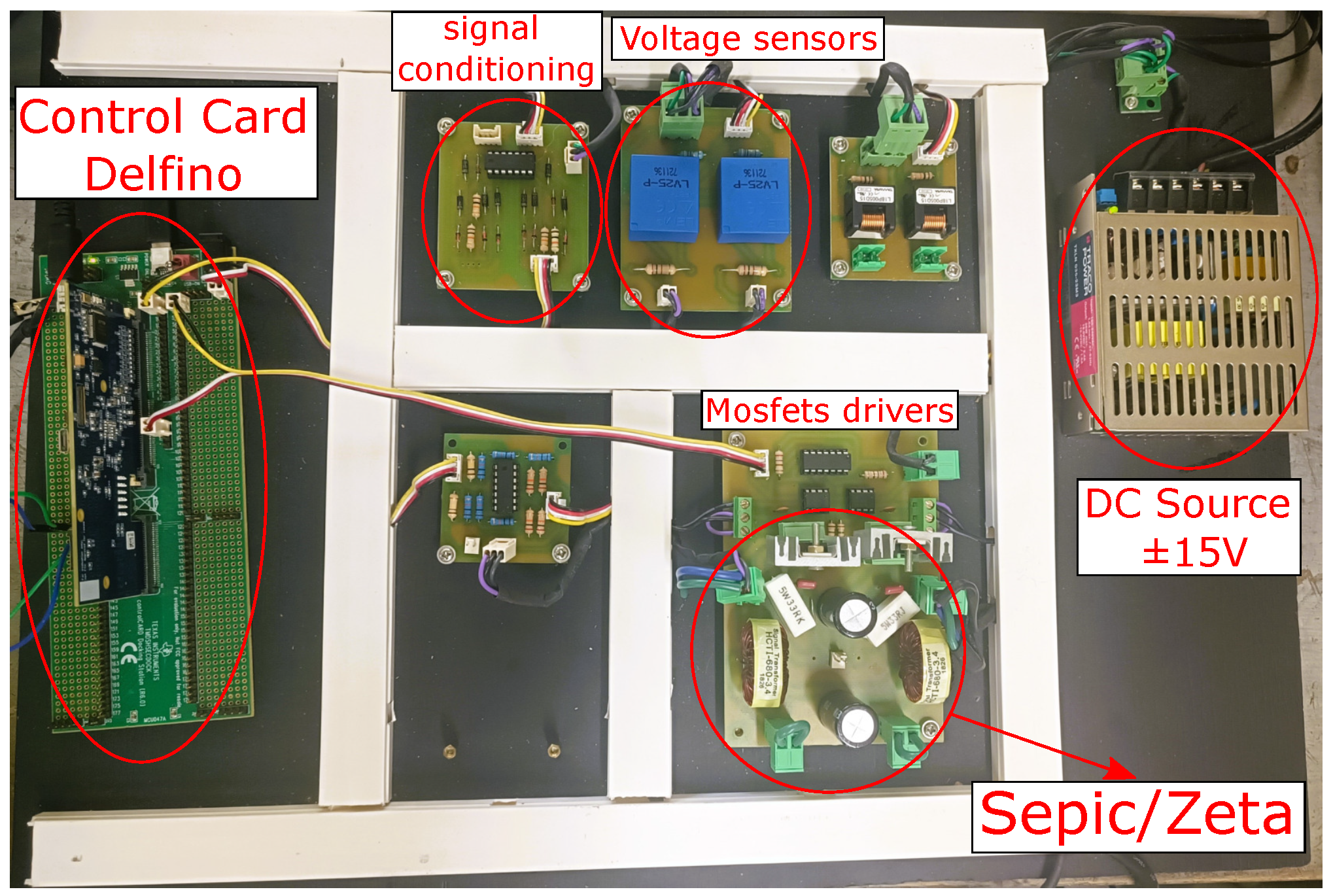
The battery charger/discharger based on a bidirectional Sepic/Zeta converter is shown in
Figure 1. This charger/discharger circuit is discussed in [
38], where deep circuit and mathematical analyses are provided. The variables used for the circuit analysis are summarized in
Table 2.
In this circuit, the main objective is to regulate the output voltage , which corresponds to the voltage at the DC bus of a microgrid. In this way, the charger/discharger ensures the safe operation of all the devices connected to the DC bus.
For realistic purposes, the parasitic resistances in both the MOSFETs and inductors are considered for the analysis. A control-oriented model for this charger/discharger circuit is provided in [
38]. In summary, the modeling procedure consists of obtaining the differential equations for the inductor currents and capacitor voltages, which are extracted from circuital analyses (charge and volt-second balances). Such a process is performed when the MOSFET control signal has ON (
) and OFF (
) states; then, those equations are combined using the control signal
u to obtain the following switched model:
It is difficult to use the previous switched model in the design of continuous controllers. Therefore, such a discontinuous model is averaged within the switching period
, which is performed by replacing the binary control signal
u by the continuous duty cycle
d. Moreover, for the sake of simplicity, the ON resistances of the MOSFETs are considered equal (
). The resulting averaged model is nonlinear; thus, it is described in terms of small-signal variables in state space representations, which will be used to design the controller. Applying the previous procedure leads to the small-signal model given in (
5) and (
6), where
(state matrix),
(input matrix), and
(output matrix) must be evaluated in the desired operating point. The quantities
,
, and
are the small-signal changes in the state vector, output, and duty cycle, respectively. Finally, the state vector variables are
,
,
and
.
The previous small-signal model is used in the following section to design the controller, aimed at regulating the DC bus voltage in a microgrid.
6. Conclusions
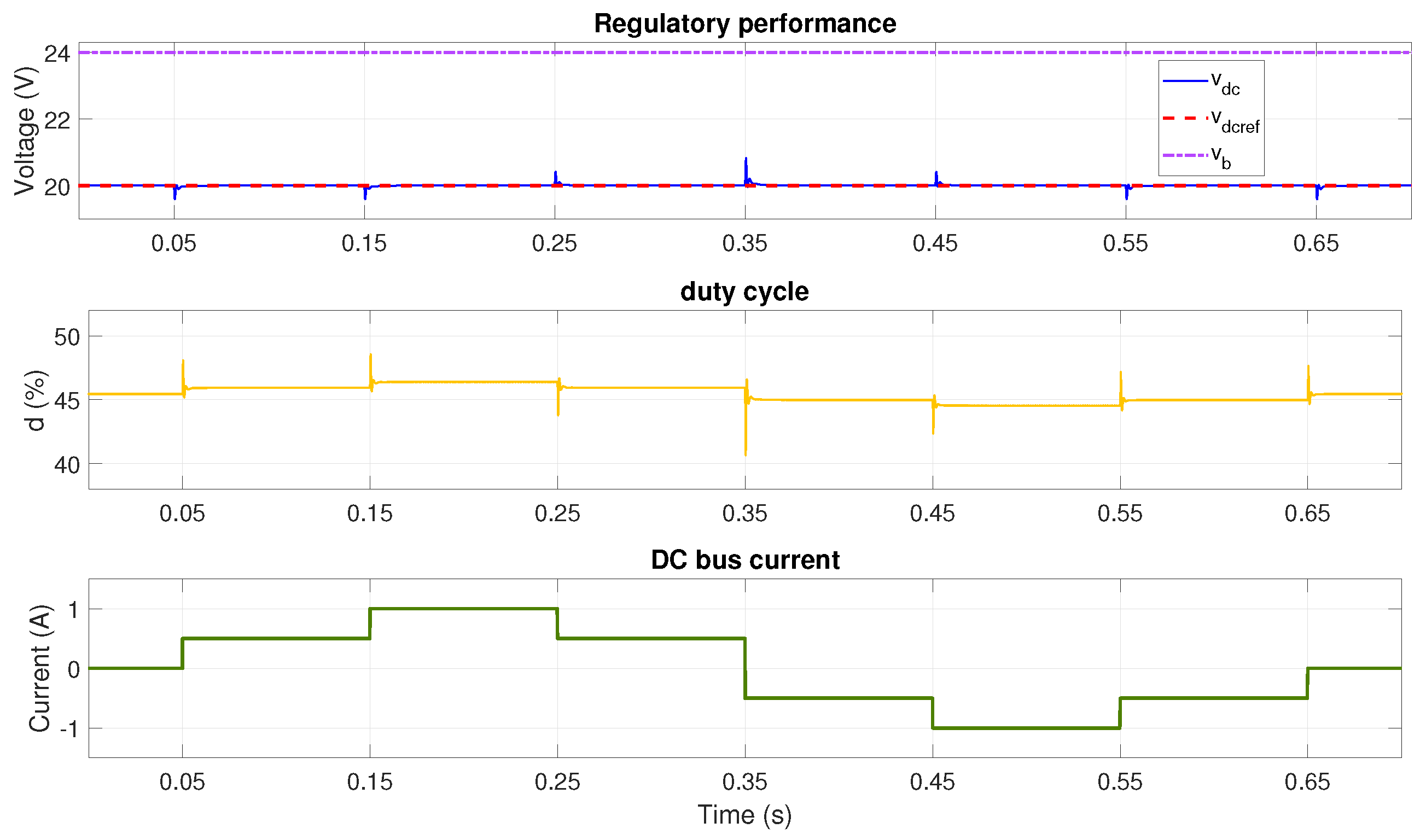
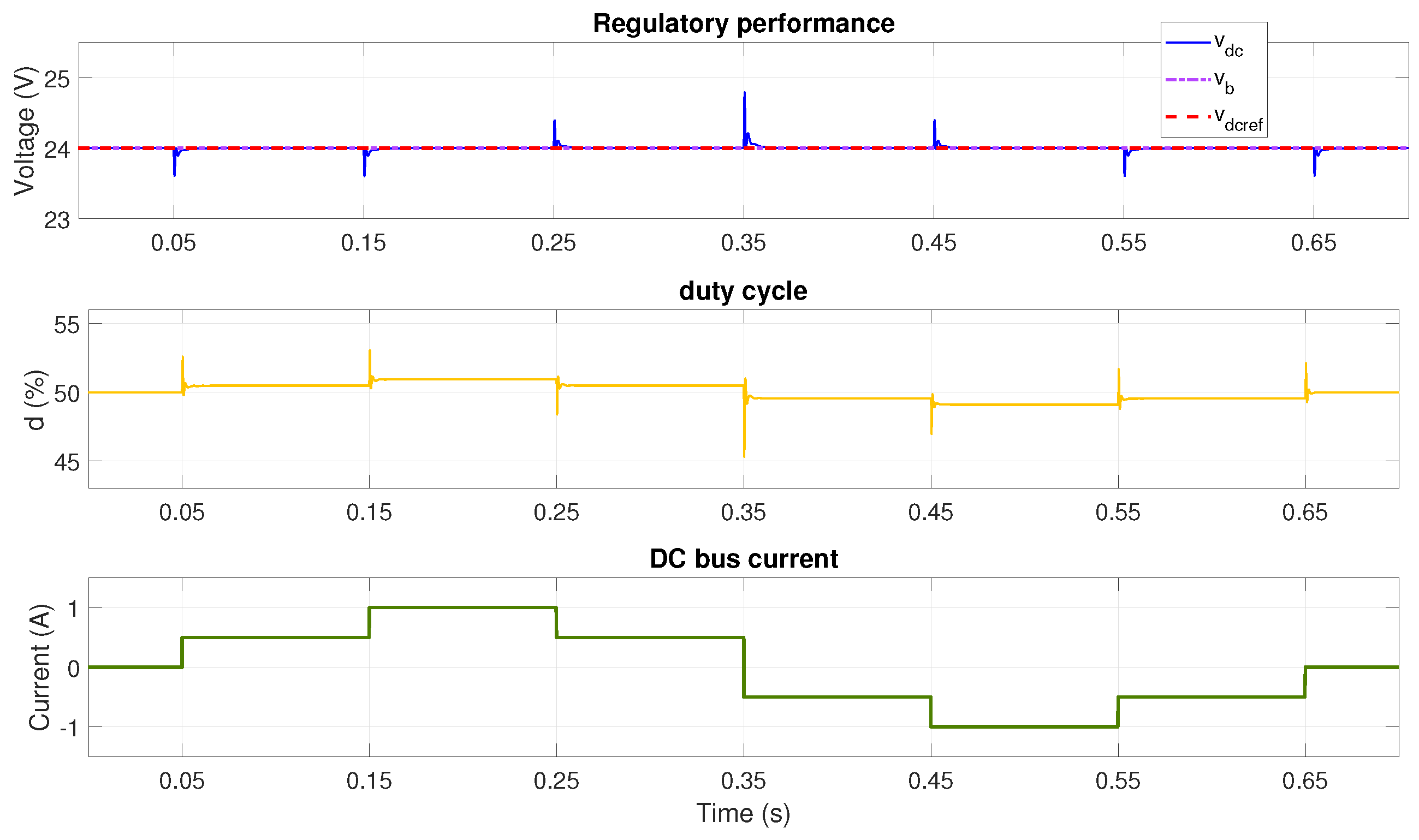
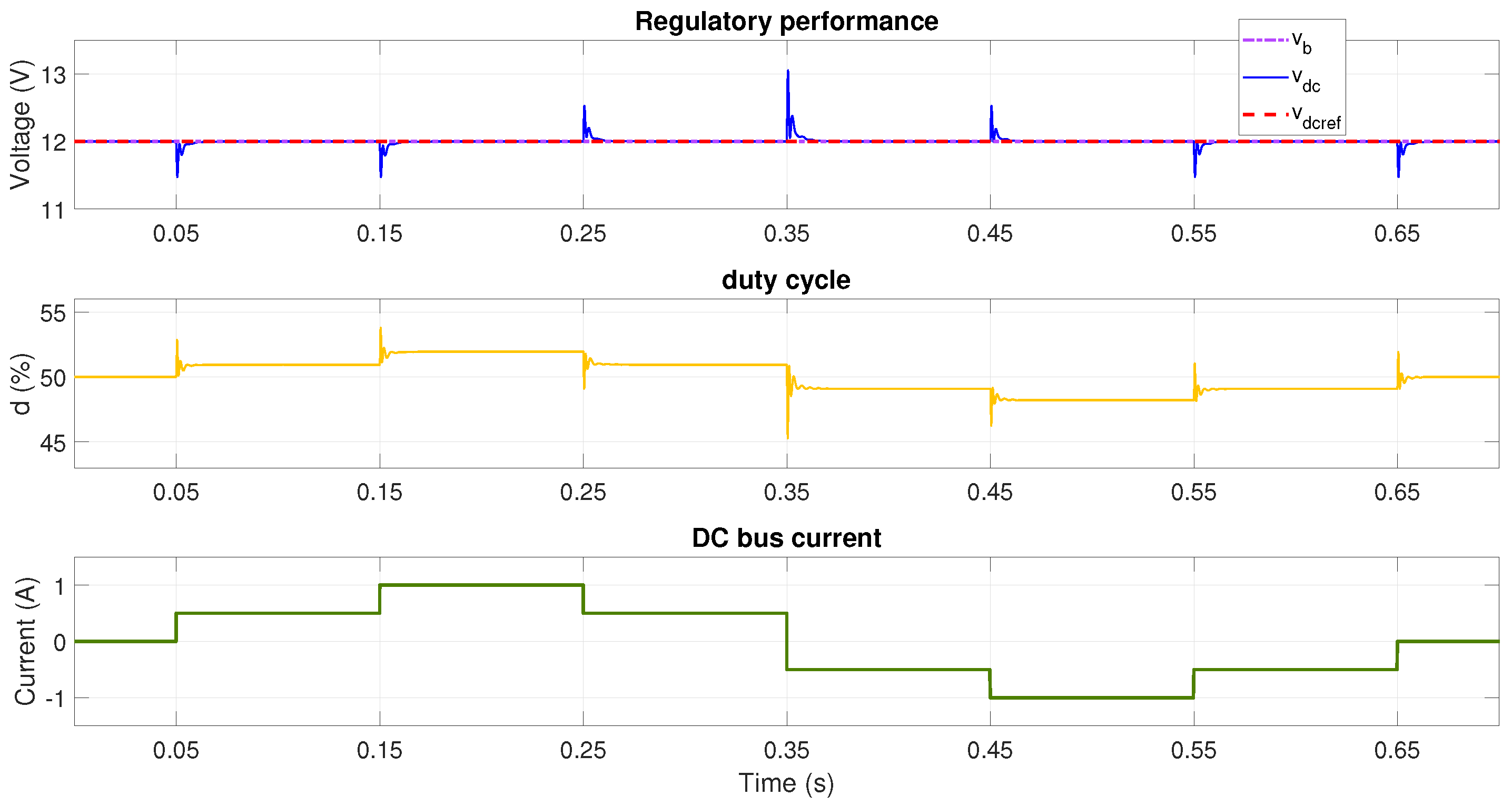
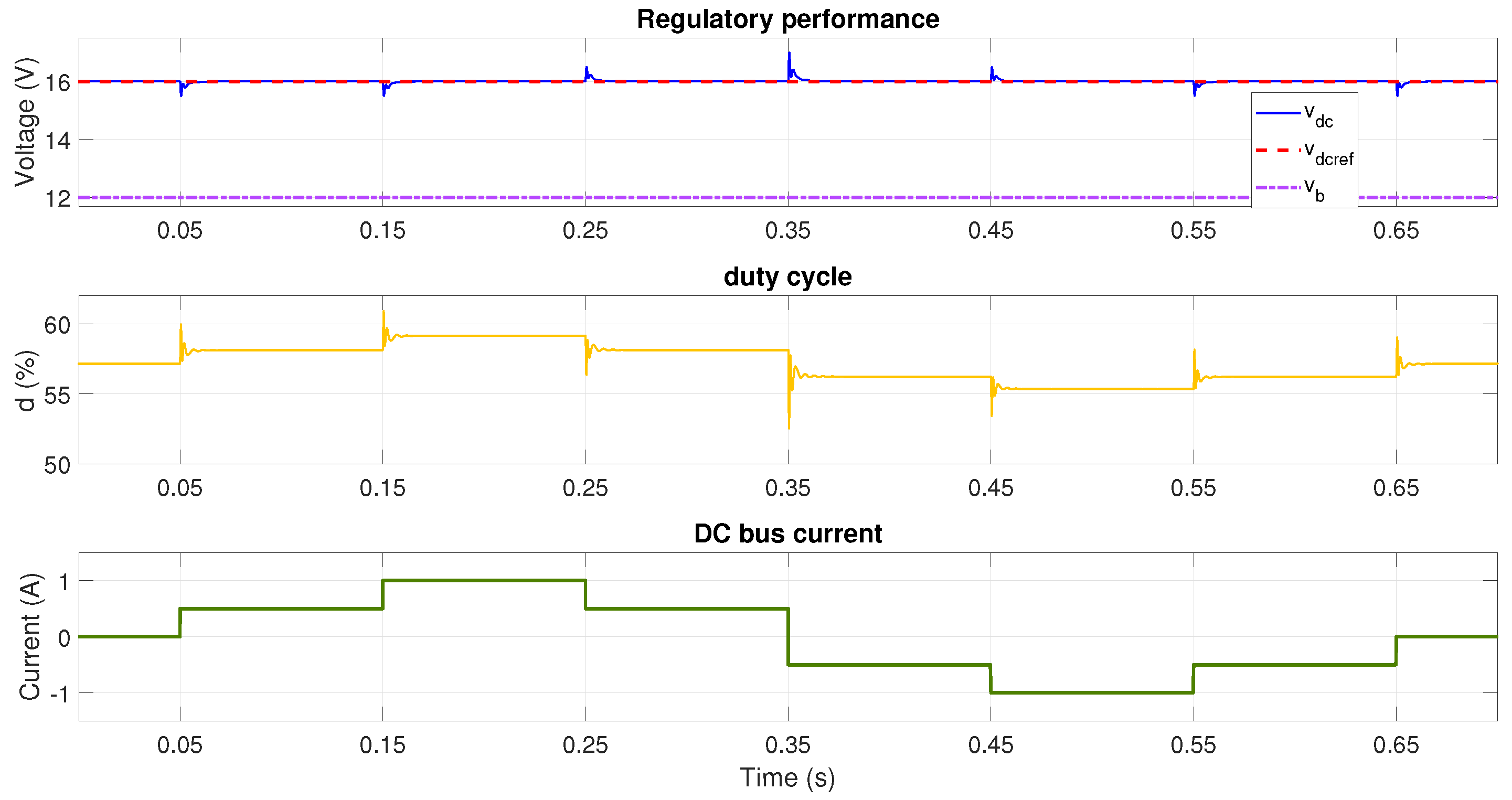
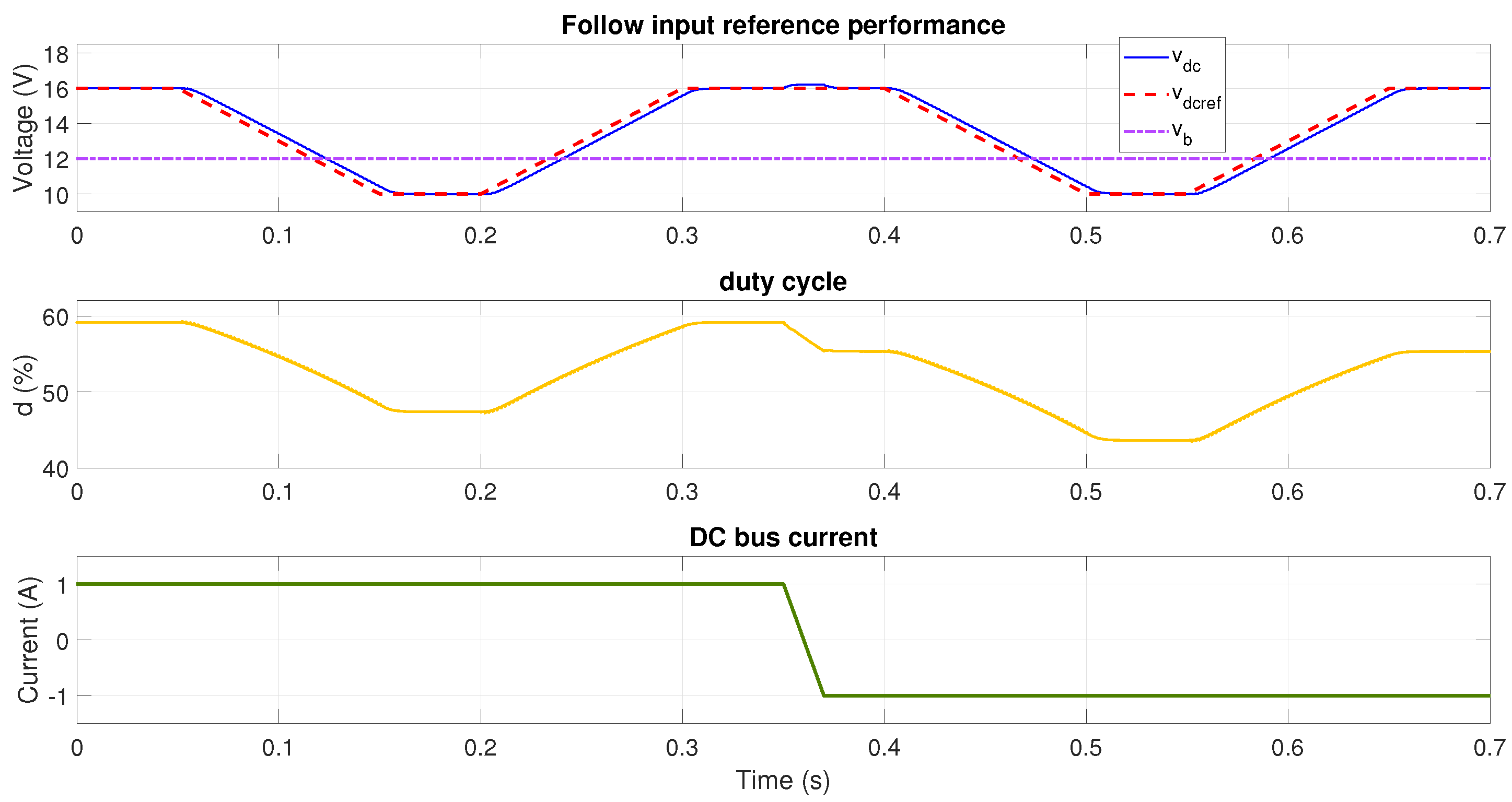
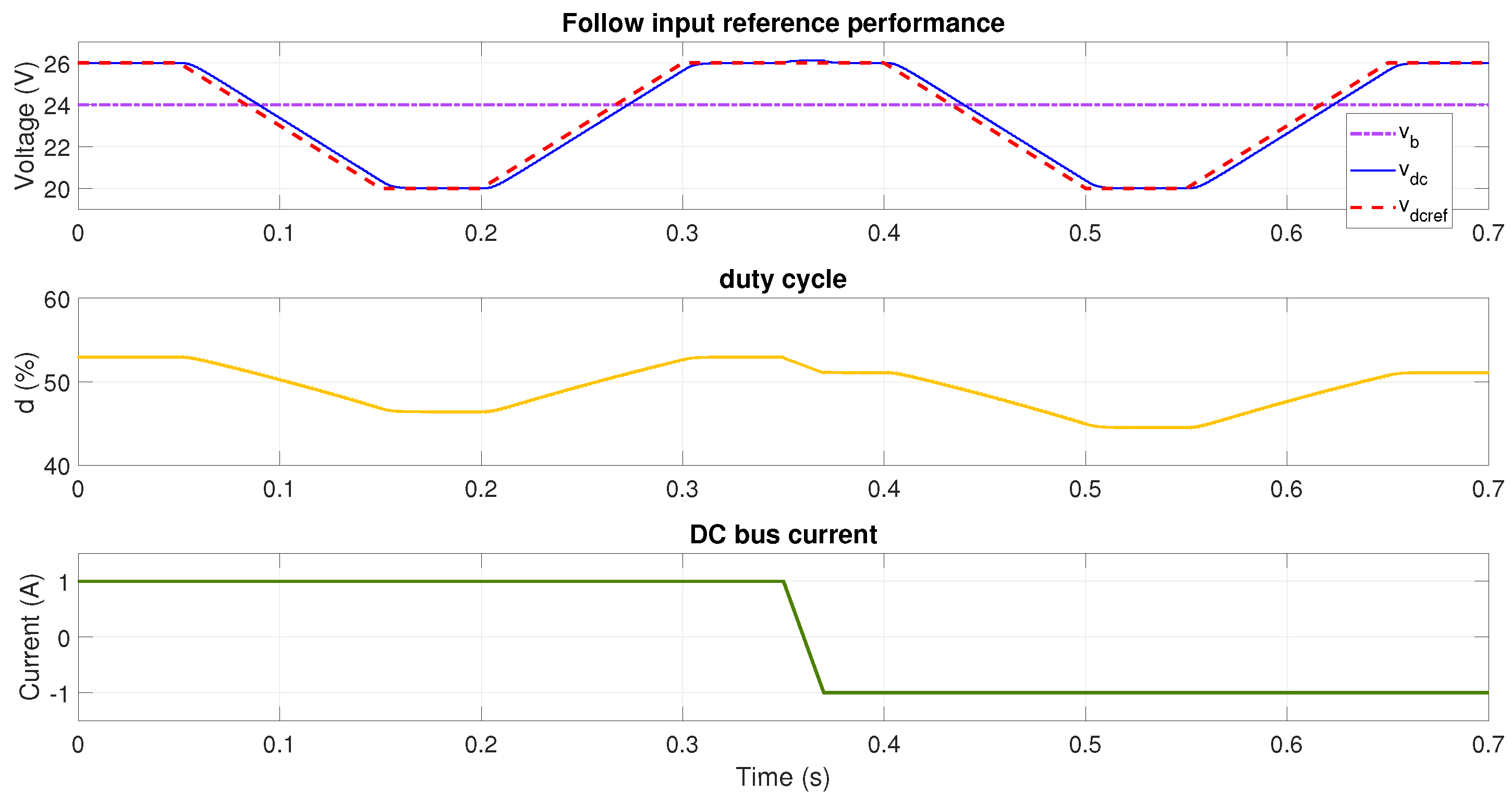
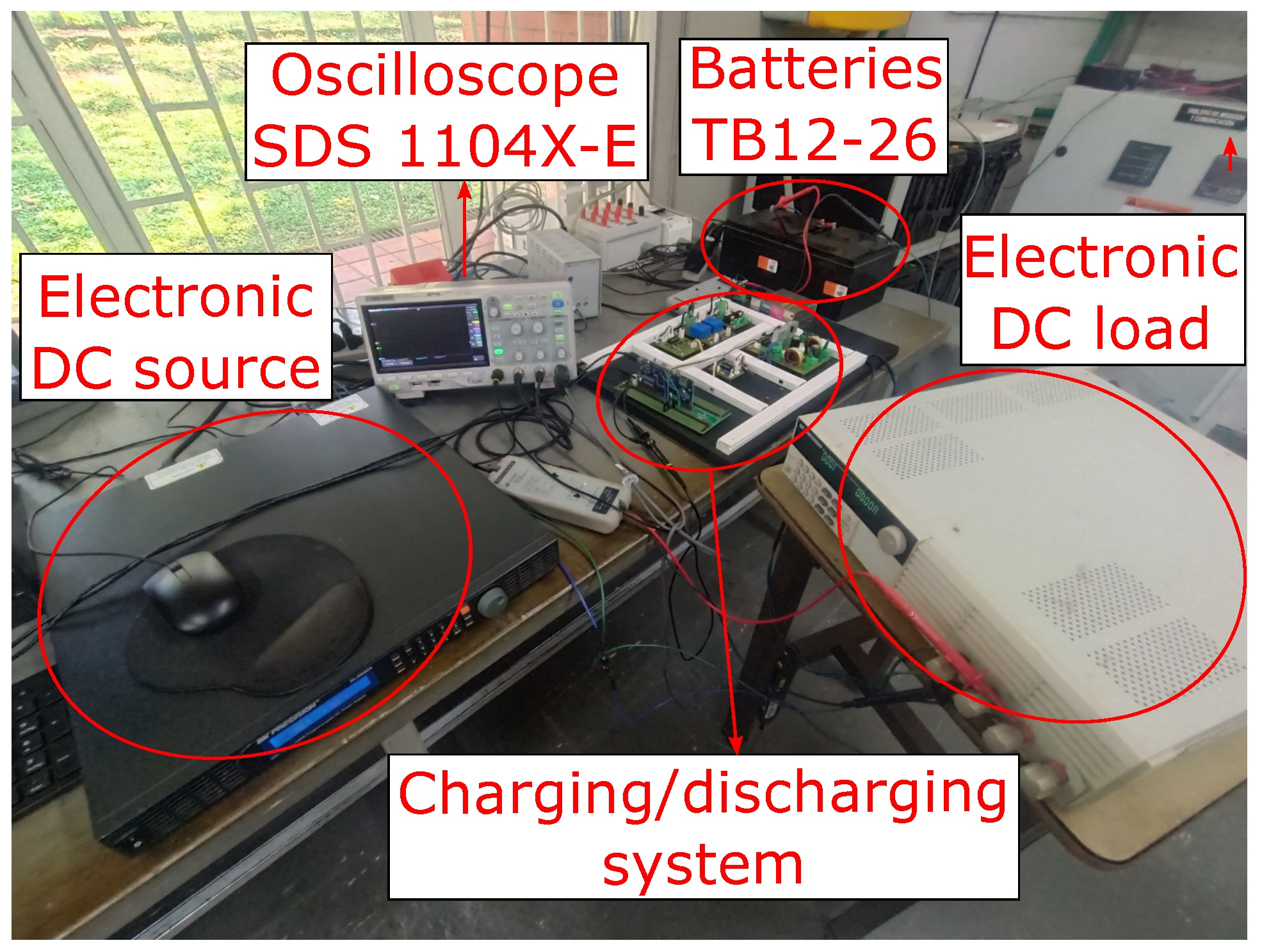
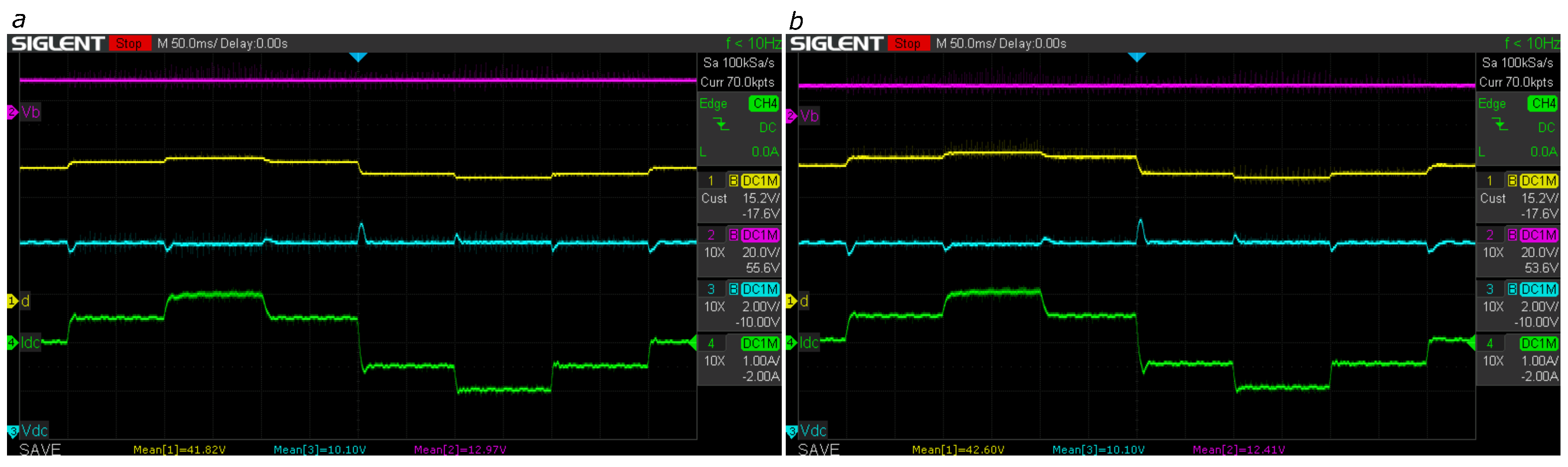
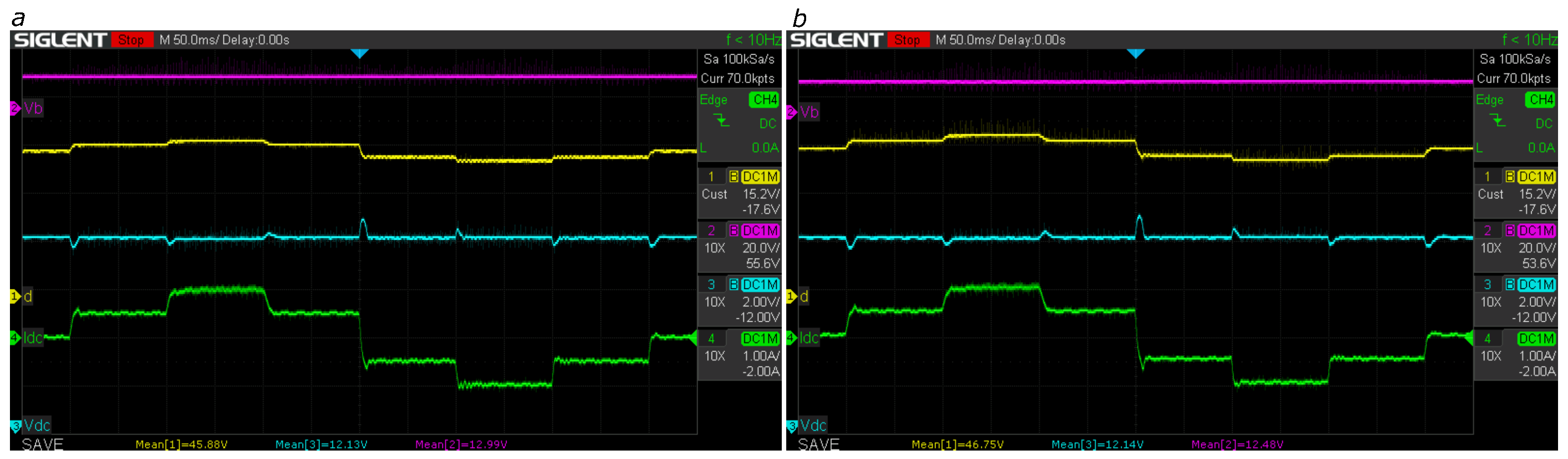
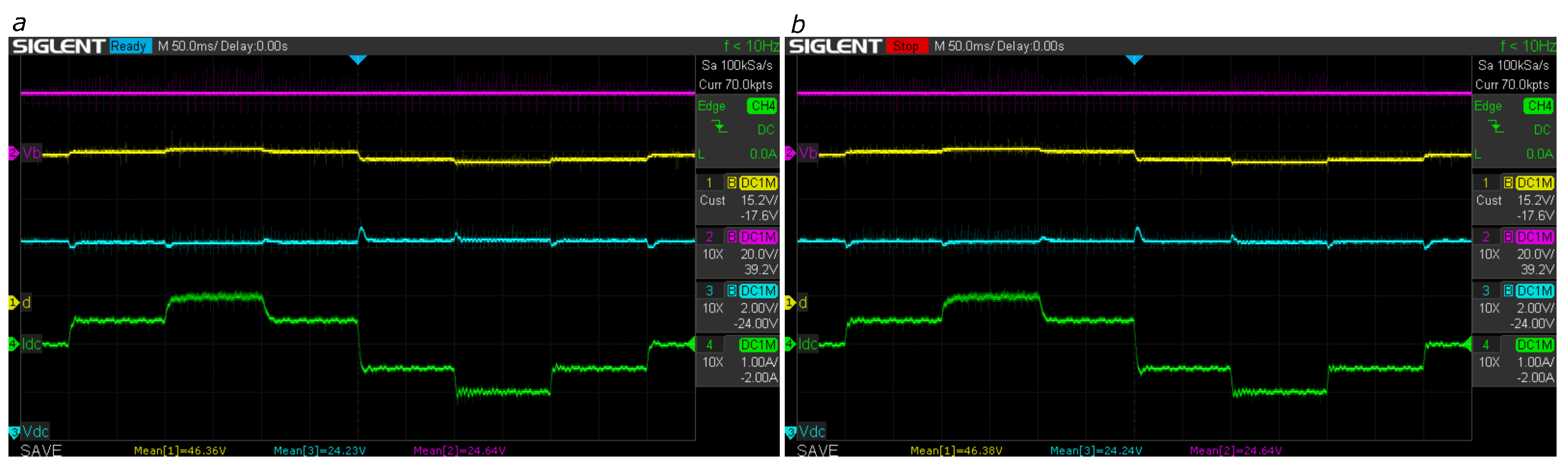
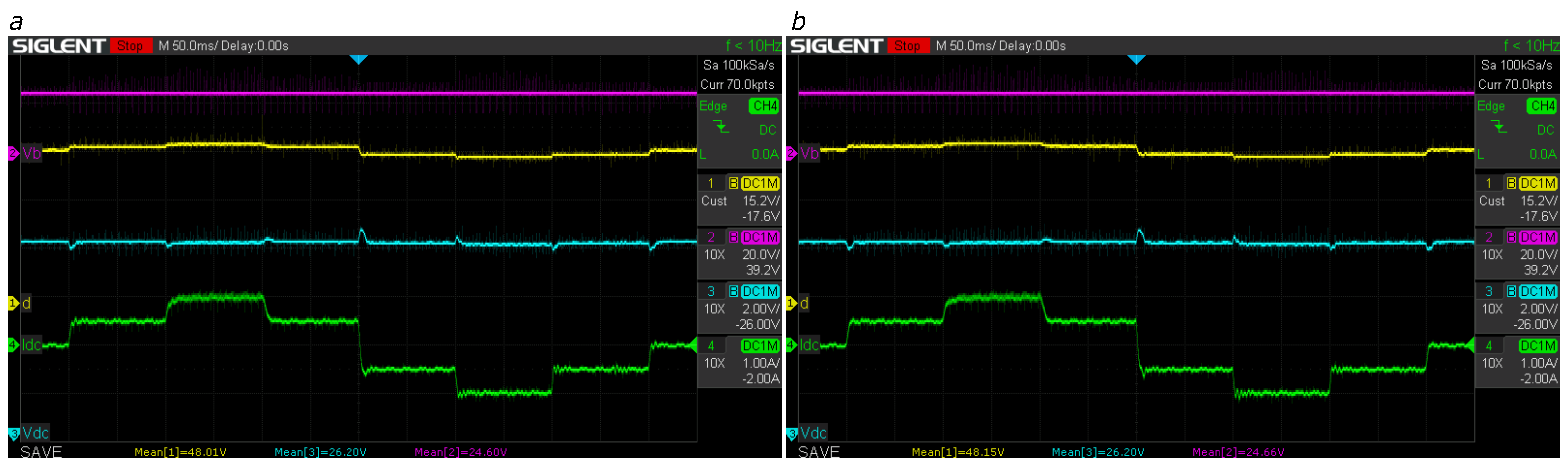
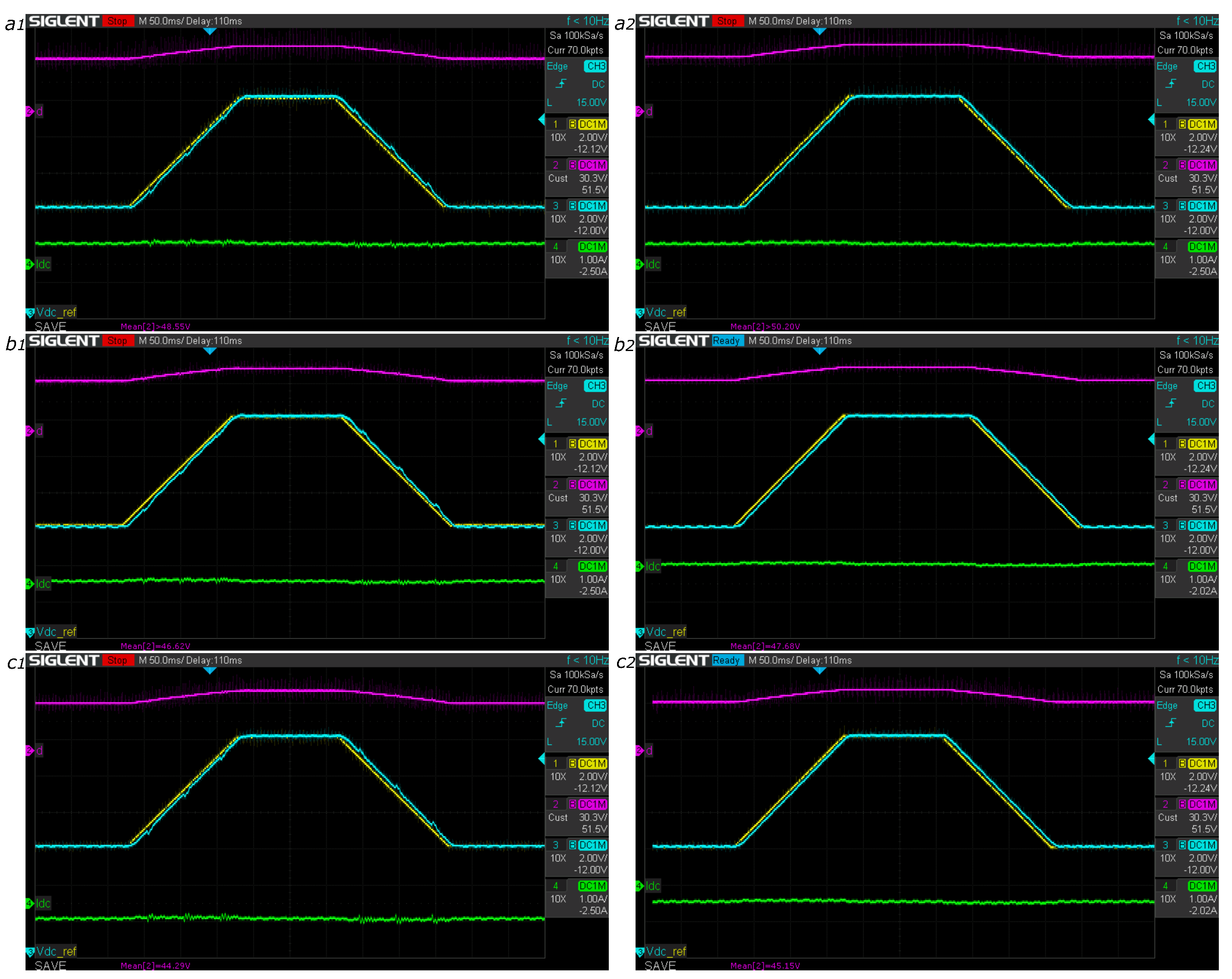
Two adaptive offline methods for adjusting the parameters of a LQG controller and regulating the DC bus of a battery charger/discharger are proposed. The charger/discharger is based on the Sepic/Zeta converter, and the parameters of the controller are determined taking into account the conditions of both the batteries and converter. For the former, conditions may vary between charge, discharge, or standby modes. Moreover, depending on the voltage requirements of the input and output, the converter can be in boost, buck, or equal gain mode. For the LQG controller, a state feedback vector and an observer gain vector must be determined in an adaptive way. The first method consists of calculating the parameters of vectors for several operating points of load and input reference voltage, and those are stored in a lookup table. In the second method, an interpolation is developed among the values of the lookup table. In simulation and experimental results, for several operating conditions, the control signal remains far away from saturation, and the control system is stable, thus providing satisfactory results.
Three indices have been proposed to evaluate the performance of the proposed adaptive methods, which are suitable to evaluate dynamic performance, CPU capacity, and cost. These indices show that the lookup table and polynomial interpolation methods present similar dynamic performance and CPU requirements, but the combined indices show that polynomial interpolation is the best option for practical and commercial application. In addition, compared with the lookup table method, that method exhibits satisfactory performance over the entire operating range, and it does not introduce unexpected transients under any operating conditions. Moreover, polynomial interpolation requires low computational consumption in contrast to the online LQG method, which means considerably lower implementation costs.
The main drawback of both proposed offline solutions is the need for an offline training campaign, which is not needed in the online alternative already reported in the literature. However, with the aim of developing low-cost solutions for deployment in commercial applications, it could be acceptable to spend the time required for training if there is significant reduction of the implementation cost. Finally, for future improvement, evaluating more deployment-oriented platforms for implementation, such as FPGA or ASIC devices, could provide a much better cost/performance ratio.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






























