


Research on Collision Avoidance Systems for Intelligent Vehicles Considering Driver Collision Avoidance Behaviour

 ,
,  ,
,
Abstract
:1. Introduction
2. Collision Avoidance Modelling
2.1. Braking Safety Distance Model
2.2. Vehicle Braking Inverse Dynamics Model
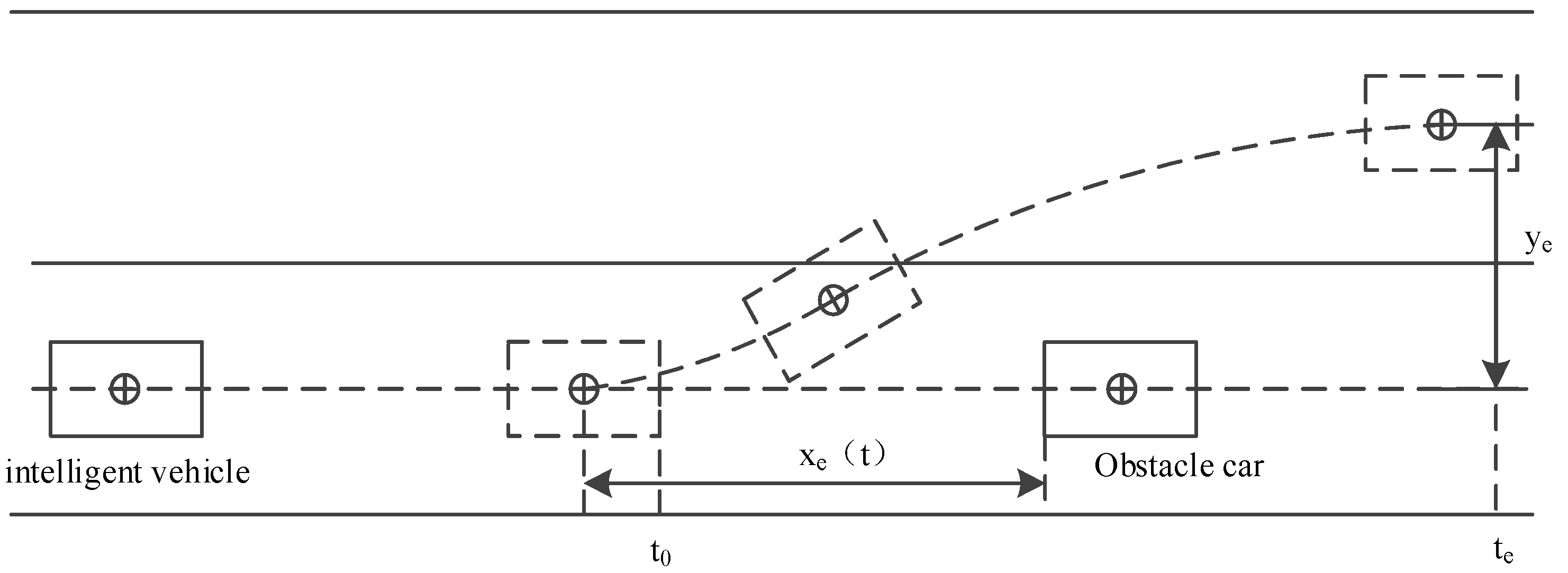
2.3. Lane Change Collision Avoidance Path Planning
2.4. MPC Track Tracking Controller
3. Analysis Based on Driver Collision Avoidance Behaviour
3.1. Pre-Processing Based on NGSIM Dataset
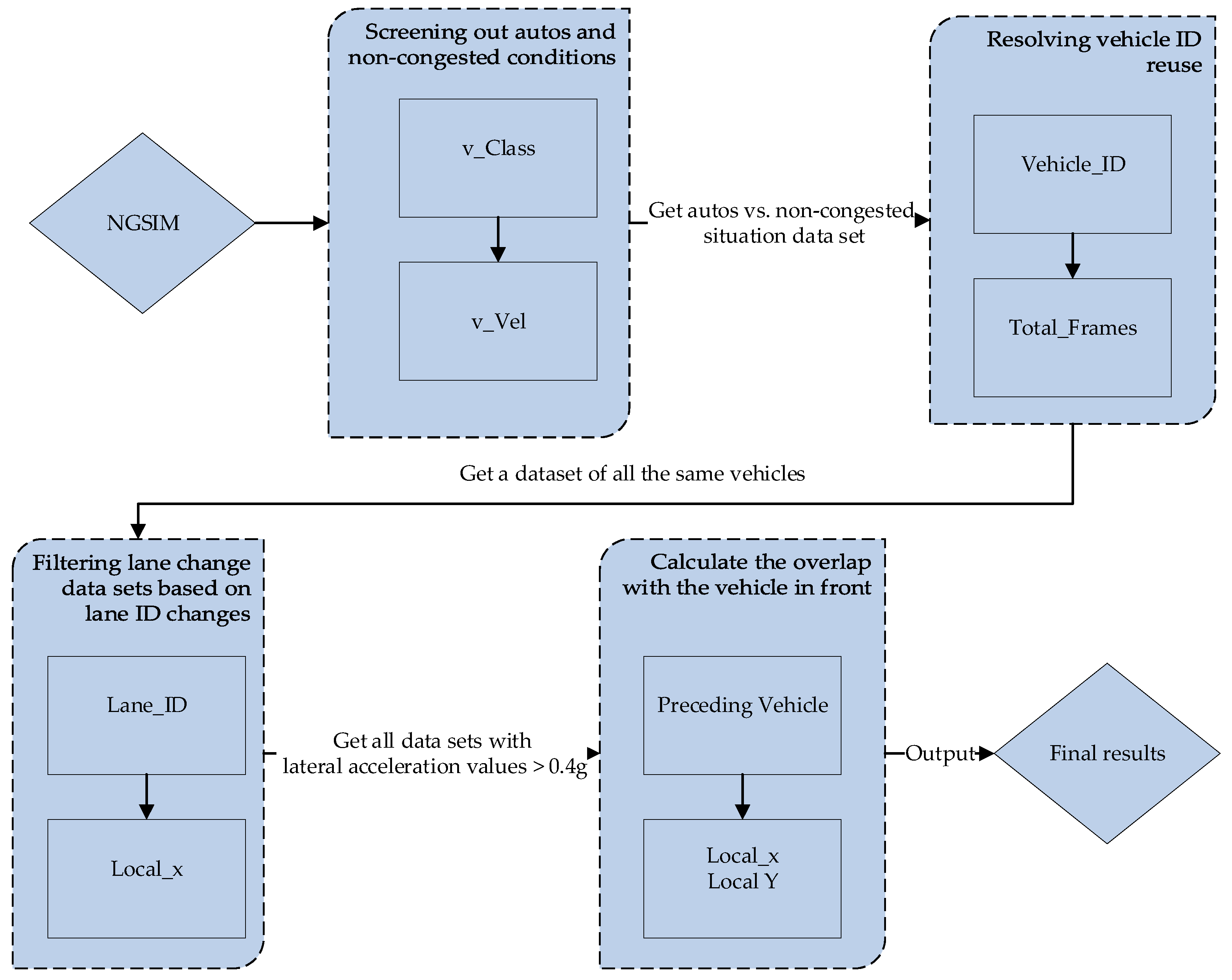
- The data is first filtered according to the type of vehicle in the dataset, excluding motorbikes and large trucks, filtering to get all data for cars, then according to the corresponding vehicle speed list, excluding the data generated by congested road sections with vehicle speeds less than 4 fit/s.
- Following this, the vehicle data of the same ID is filtered, and the data of a single vehicle is filtered according to the total length of time (Total_Frames) collected from different vehicles to solve the case of vehicle ID reuse, then the list of vehicle lanes and the list of lane differences are obtained, and here only the case of a single lane change occurs is considered.
- According to the lane difference list get the index of the lane ID change point, and accordingly get the data before and after the vehicle lane change and the data after the vehicle and lane change. According to the data before and after the lane change, get the list of horizontal coordinates before and after the lane change, and according to the list of horizontal coordinates combined with the continuous change condition, get the starting point and end point of the lane change. At this point, we have 610 sets of lane change data for US-101 and 874 sets of lane change data for I-80, then we need to filter out the operating conditions where the lateral acceleration is greater than 0.4 g. Intercept the list of lateral coordinates between the start and end of the lane change, calculate the lateral acceleration from the lateral coordinates with the frame ID and convert the units. The list of accelerations was traversed, and data for vehicles with accelerations greater than 0.4 g were retained (g was considered to be 10). At this point, there were 322 sets of lane change data for US-101 roads and 326 sets of I-80 roads with lateral accelerations greater than 0.4 g.
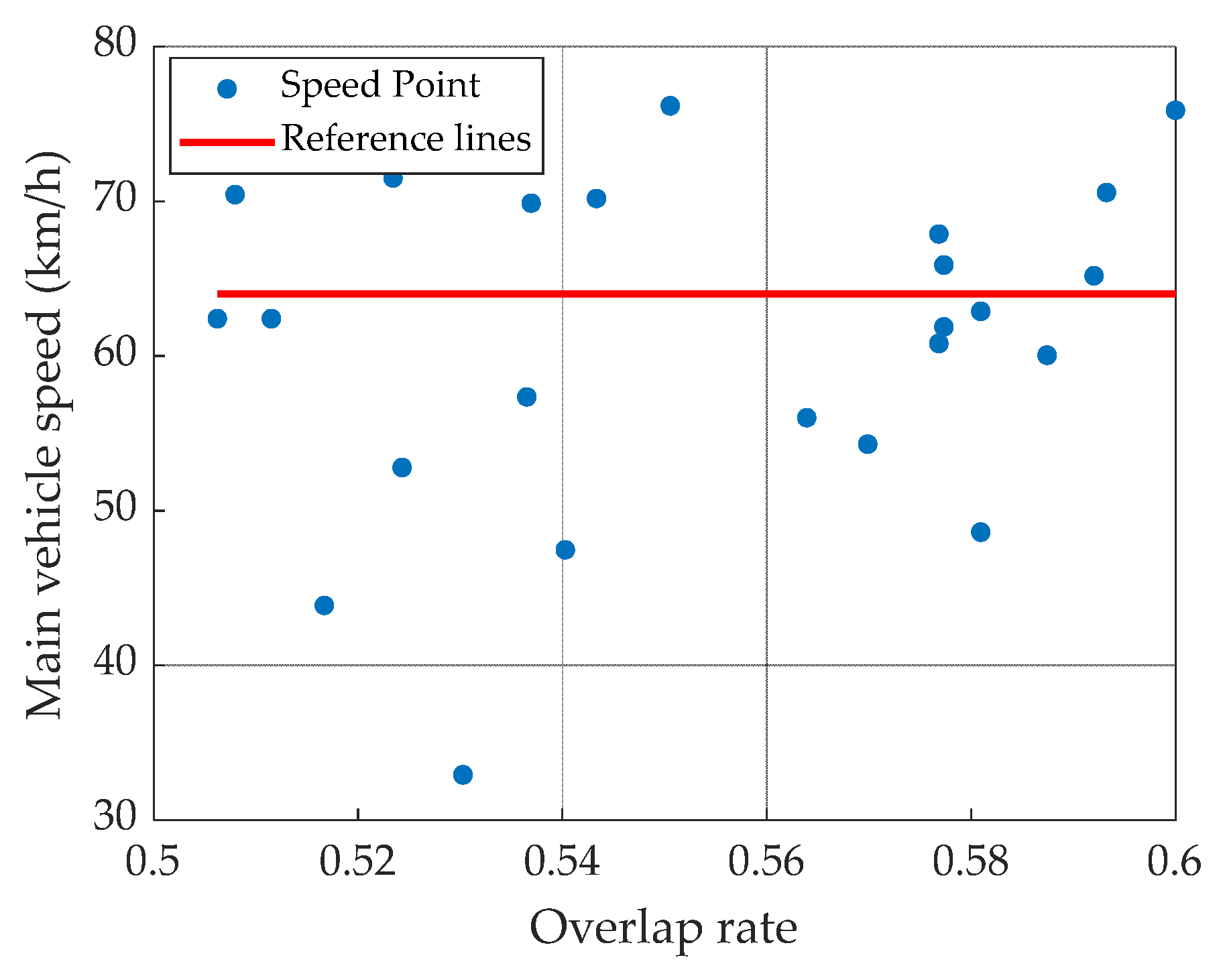
- Finally, the overlap rate at the moment the vehicle starts to change lanes is obtained. The overlap rate in this paper represents the minimum lateral distance required for that vehicle to avoid the vehicle ahead and the percentage of that vehicle’s width: the data at the moment the vehicle starts to change lanes is obtained from the vehicle ahead at that moment by means of the time and preceding vehicle ID dual indicators. For calculation purposes, the overlap rate is calculated, and data of that size is saved, assuming that the vehicle is 4 m long and 1.8 m wide at the same moment, and save the acceleration of the vehicle at the moment of the previous second to determine whether the vehicle brakes early.
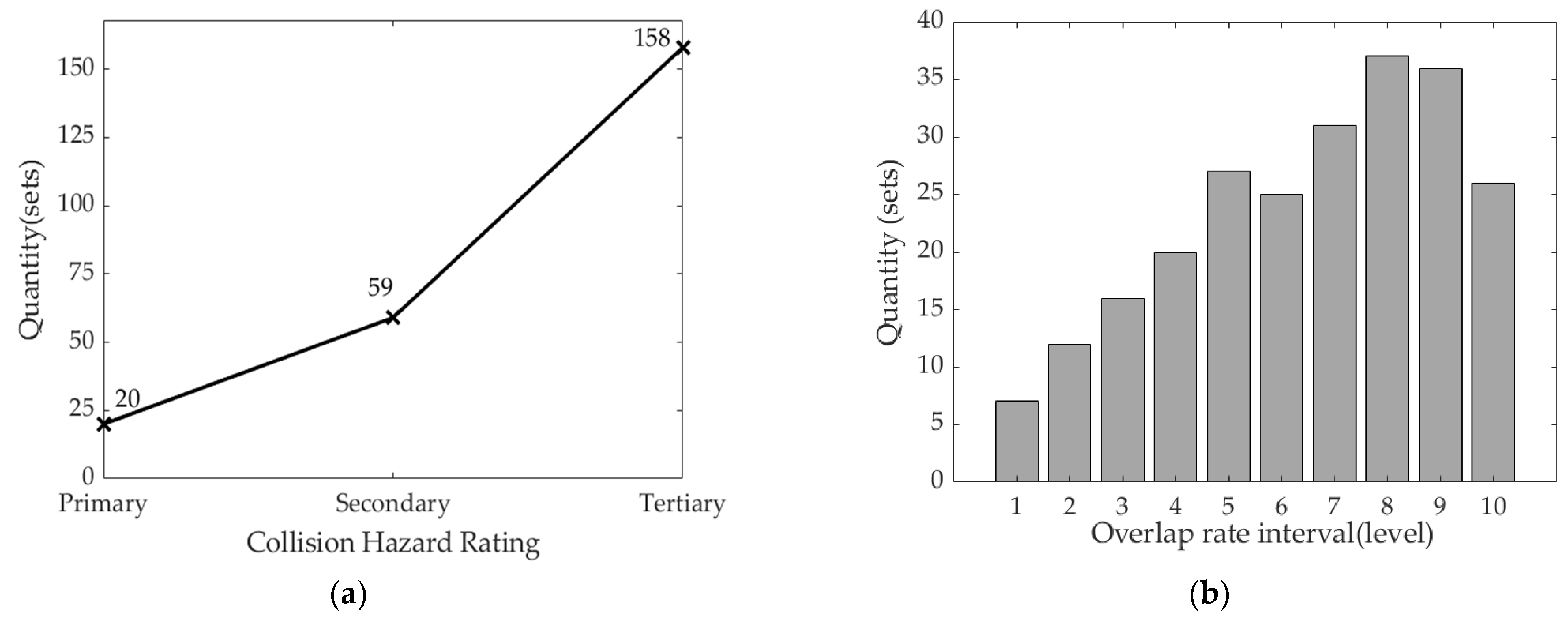
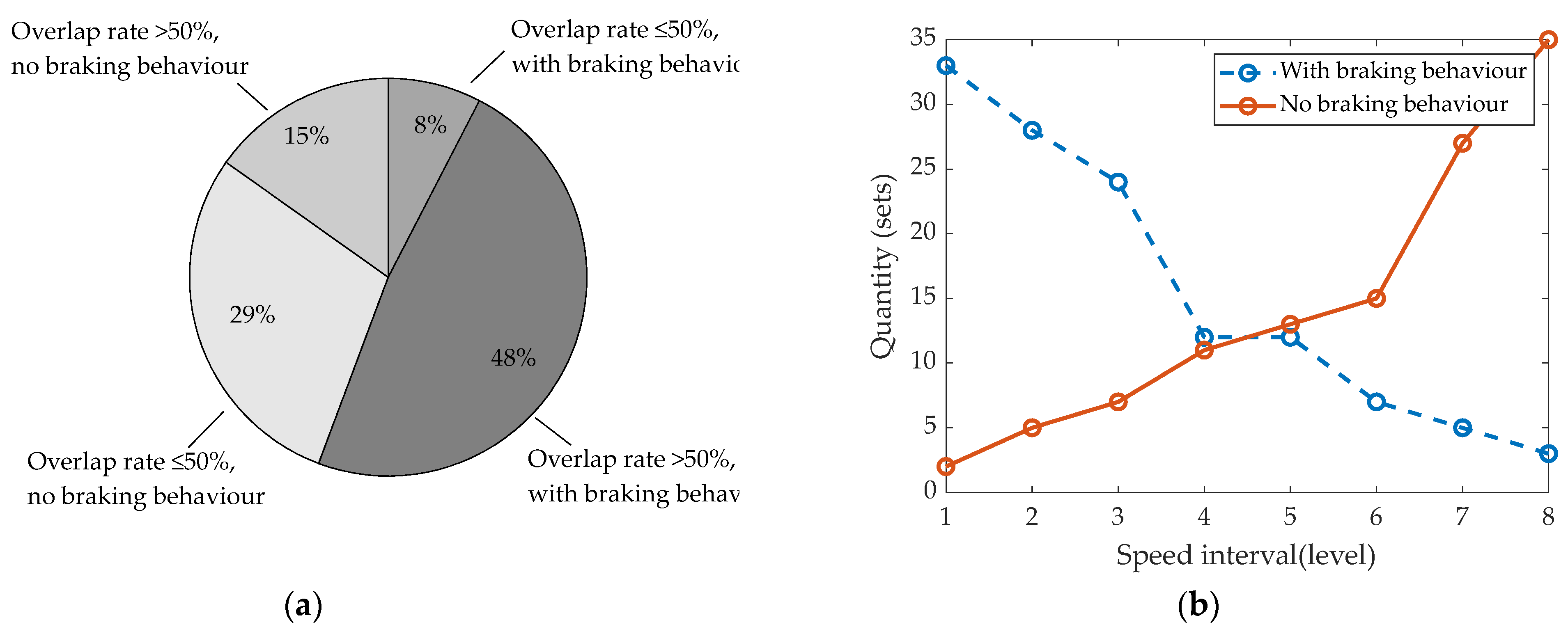
3.2. Analysis of Driver Collision Avoidance Behaviour Based on Pre-Processing Results
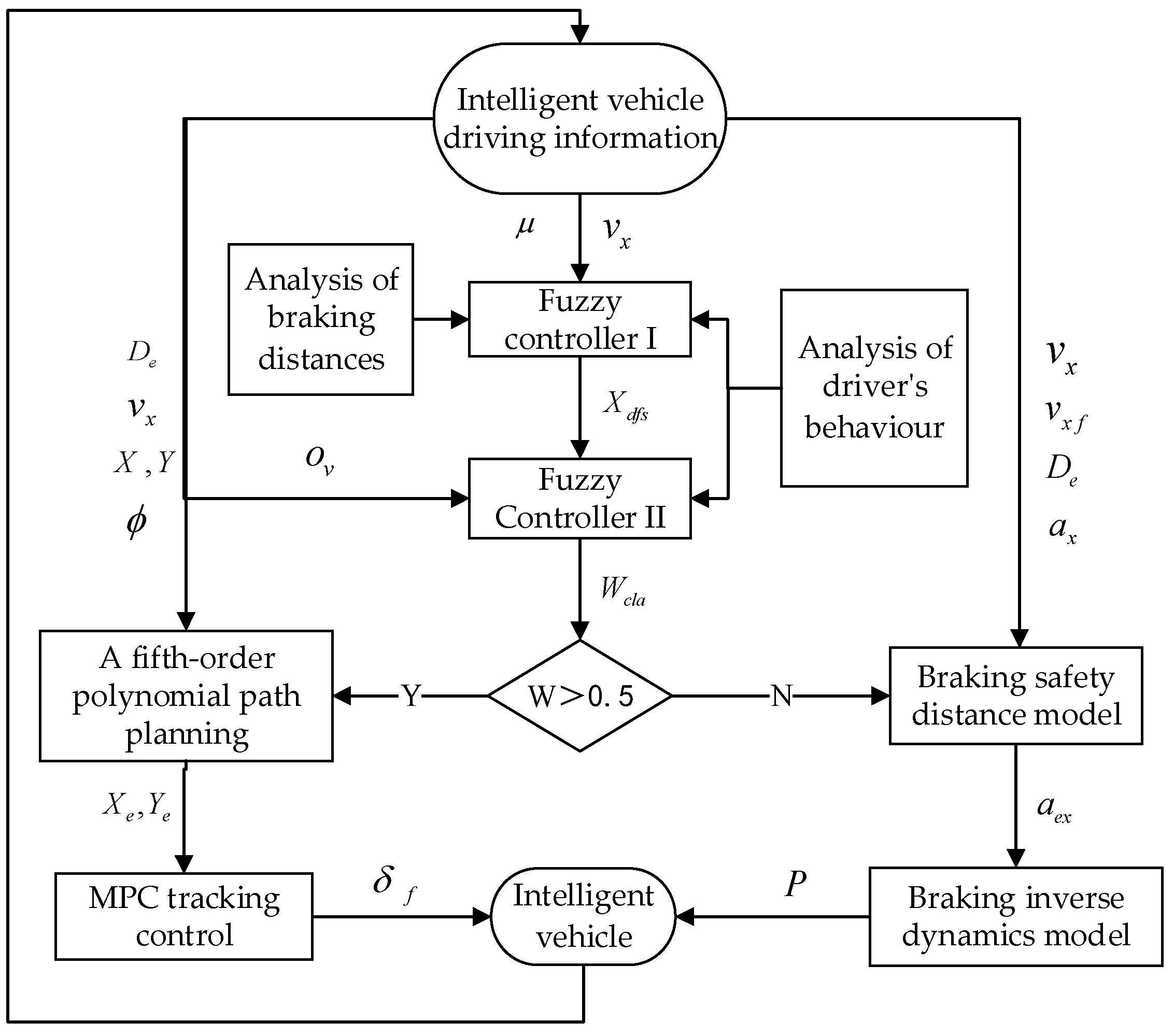
4. Design of a Two-Layer Fuzzy Controller
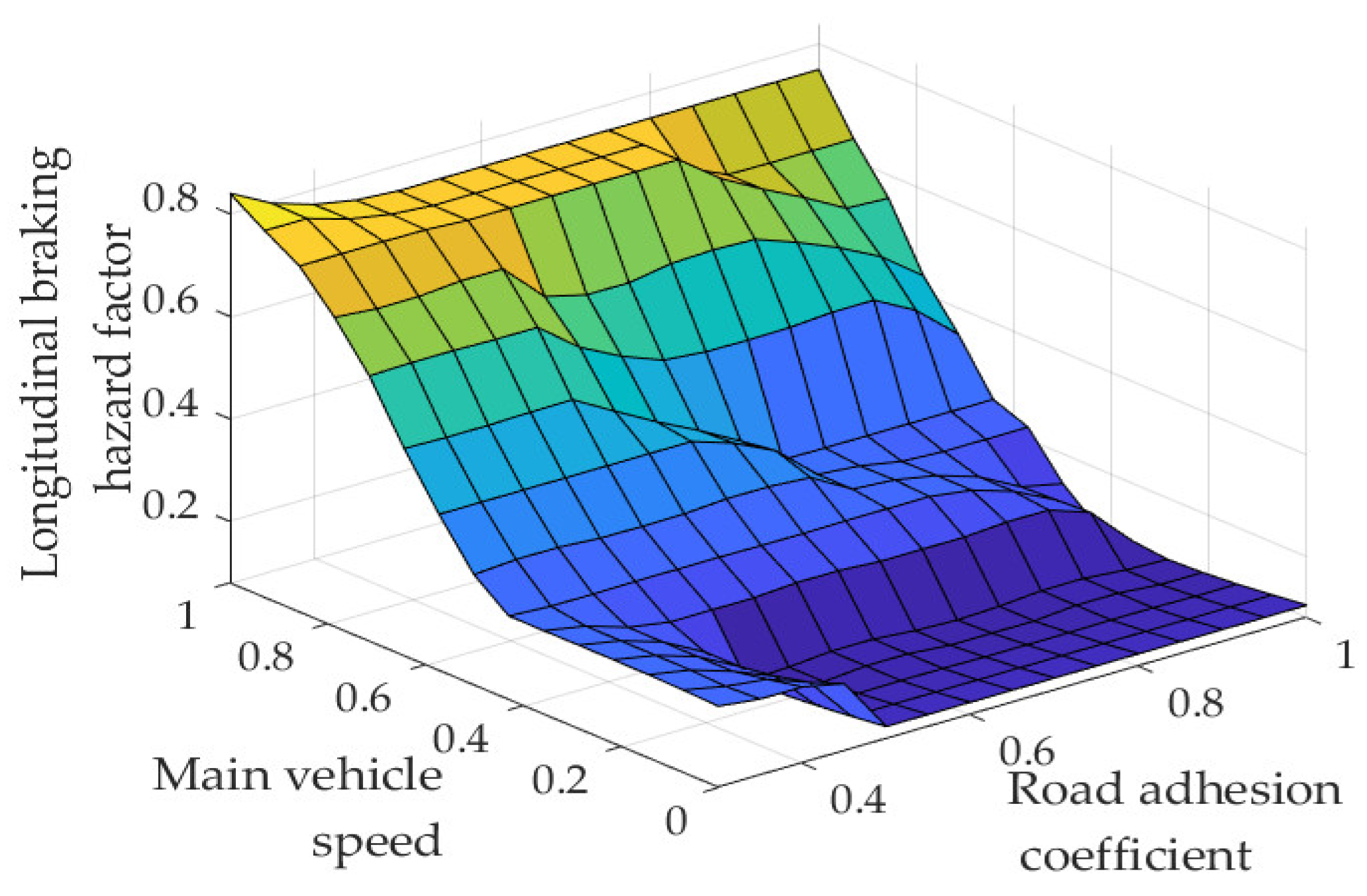
4.1. Fuzzy Controller I
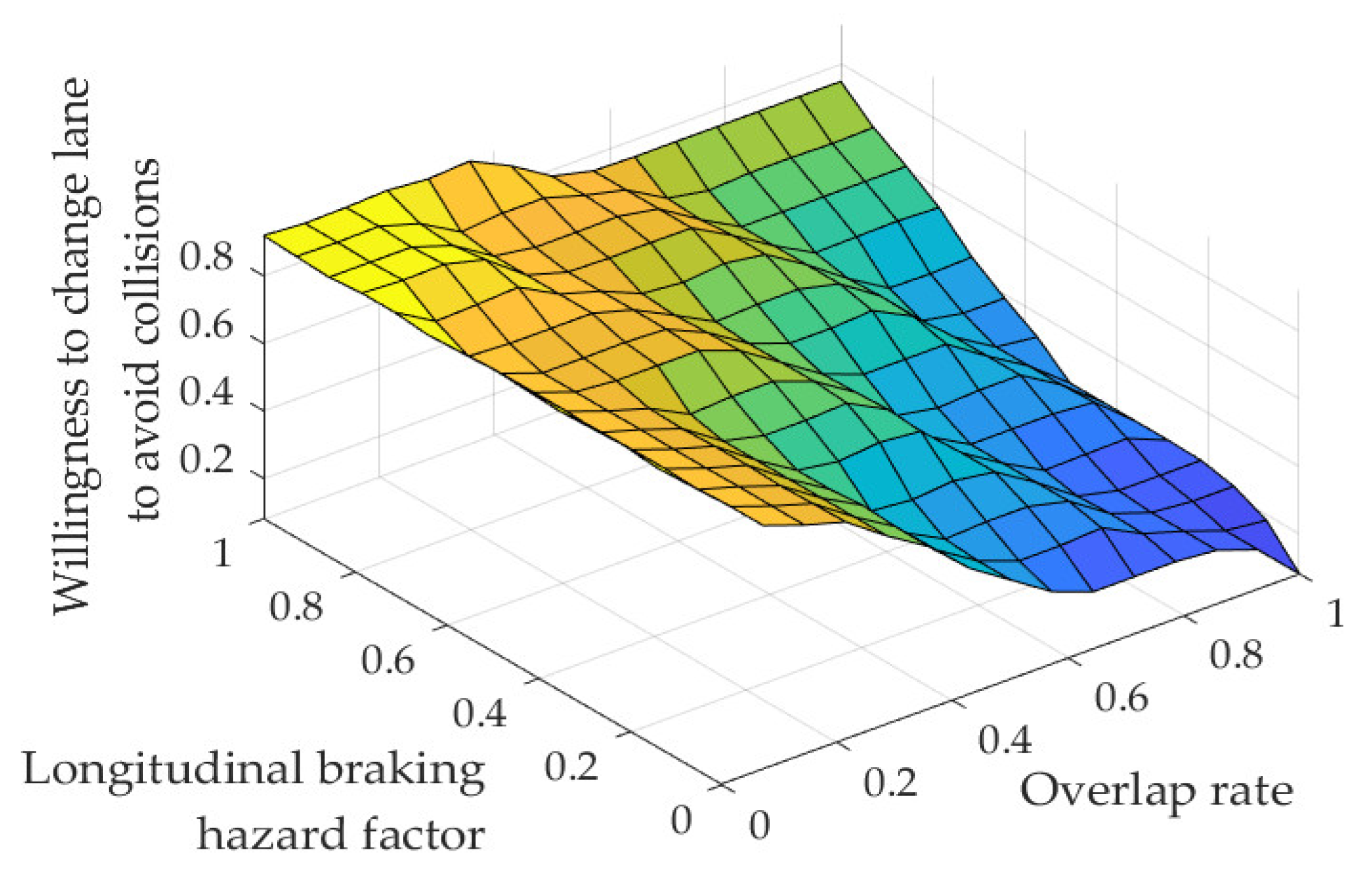
4.2. Fuzzy Controller II
5. Simulation Verification
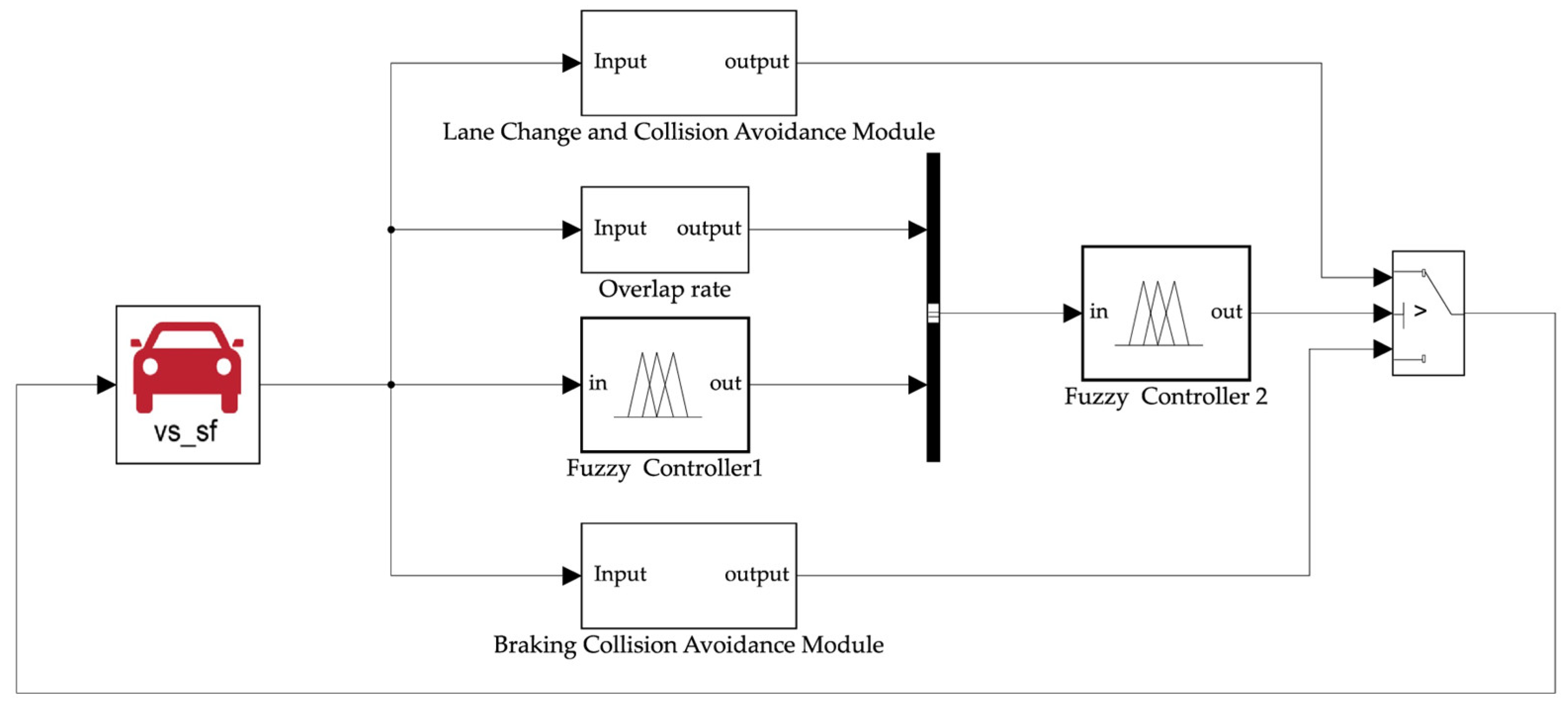
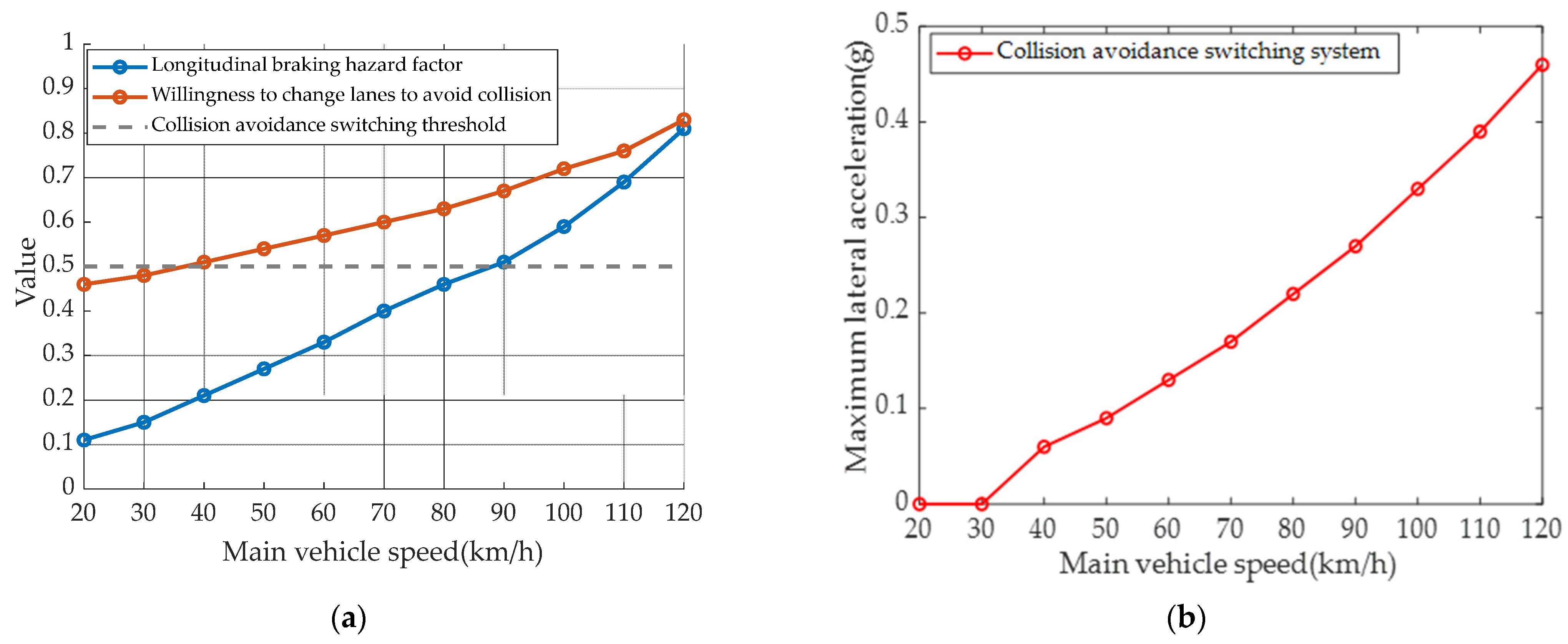
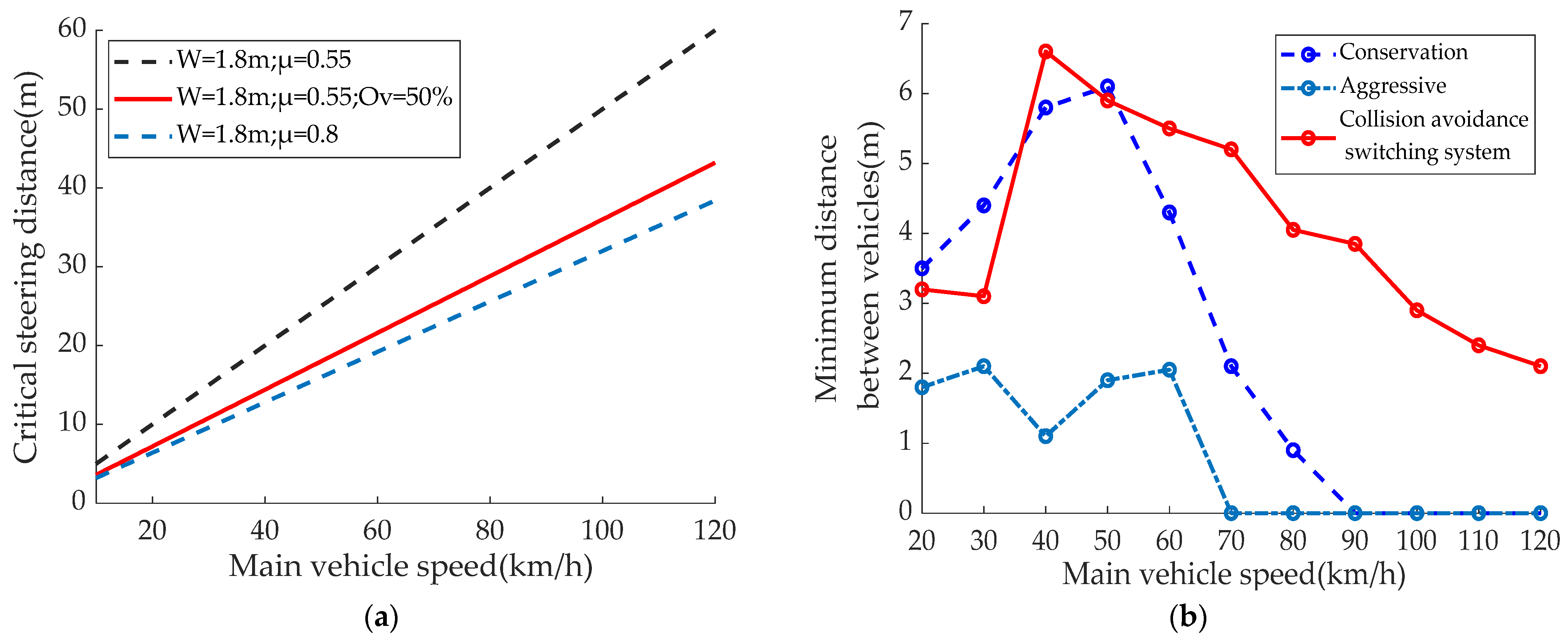
5.1. Simulation of Collision Avoidance Switching Systems
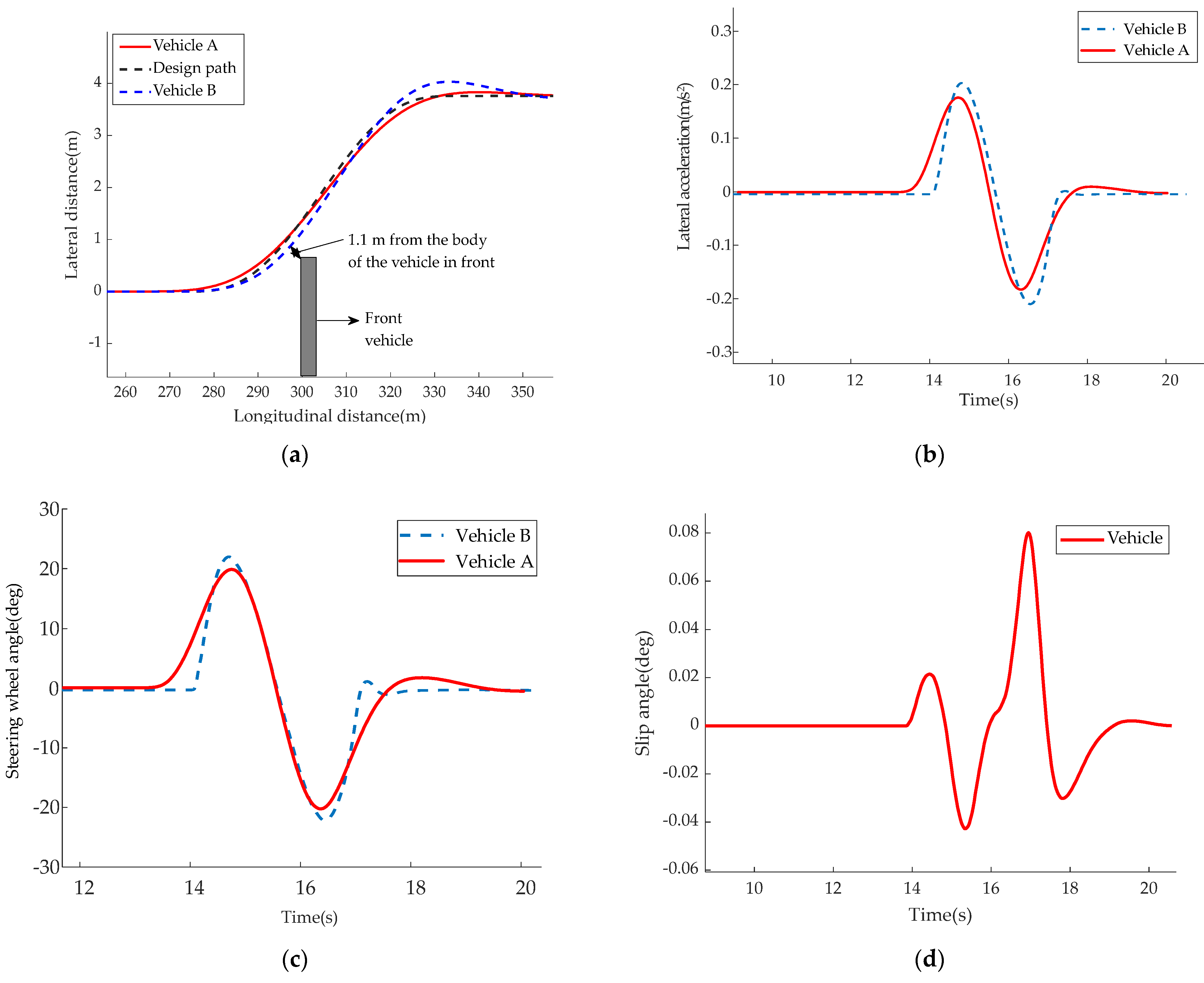
5.2. Simulation of a Collision Avoidance Switching System at a Speed of 70 km/h
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- National Bureau of Statistics of China. Traffic Accident Statistics [DB/OL]. Available online: http://data.stats.gov.cn/index.htm (accessed on 10 April 2023).
- Xu, Z.; Zhao, W.; Wang, C.; Dai, Y. Local Path Planning and Tracking Control of Vehicle Collision Avoidance System. J. Nanjing Univ. Nat. Sci. 2018, 35, 729–738. [Google Scholar]
- Yong, J.; Li, Y.; Feng, N.; Li, U.Y. Adaptive automatic emergency braking control strategy based on an ESHB system. J. Automot. Saf. Energy 2022, 13, 300–308. [Google Scholar]
- Zhang, Z.; Luo, D.; Rasim, Y.; Li, Y.; Meng, G.; Xu, J.; Wang, C. A Vehicle Active Safety Model: Vehicle Speed Control Based on Driver Vigilance Detection Using Wearable EEG and Sparse Representation. Sensors 2016, 16, 242. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- You, B. Research on Hierarchical Control Strategy for Autonomous Emergency Braking System Based on Prescan. Agric. Equip. Veh. Eng. 2022, 60, 54–59. [Google Scholar]
- Xiao, Y.; Yin, S.; Cui, G.; Yao, L.; Fang, Z.; Zhang, W. A Near-Field Area Object Detection Method for Intelligent Vehicles Based on Multi-Sensor Information Fusion. World Electr. Veh. J. 2022, 13, 160. [Google Scholar] [CrossRef]
- Humaidi, A.; Fadhel, M.; Ajel, A. Lane detection system for day vision using altera DE2. Telkomnika 2019, 17, 349–361. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Lv, K.; Zhao, J.; Liu, C.; Qiao, J. Research Review on Development of AEB Control Strategy Based on Human, Vehicle, Road and Environment. Automob. Technol. 2021, 548, 1–8. [Google Scholar]
- Hu, Y.; Lv, Z.; Liu, X. Algorithm and simulation verifcation of longitudinal collision avoidance for autonomous emergency break (AEB) system based on PreScan. J. Automot. Saf. Energy 2017, 8, 136–142. [Google Scholar]
- Yuan, W.; Jiang, Z.; Guo, Y. Research on Vehicle Active Collision Avoidance System Based on the Coordinated Actions of Braking and Steering. China J. Highw. Lransp. 2019, 32, 173–181. [Google Scholar]
- Yin, P.; Jiang, Z.; Ye, M.; Zhao, S.; Zhou, B. Research on Active Collision Avoidance Control System Considering Steering. Automob. Technol. 2019, 526, 1–7. [Google Scholar]
- Chen, X.; Cheng, S.; Zhao, W.; Wang, C.; Jiang, R. Extension-decision-based adaptive collision avoidance control for vehicles. China. J. Mech. 2023, 55, 213–222. [Google Scholar]
- Yan, M.; Wei, M.; Wang, K.; Zhao, W.; Wang, Y.; Zhang, F. Cooperative Collision Avoidance Control of Steering and Braking Based on Function Allocation and Multi-Objective Fuzry Decision. J. Chongqing Univ. Technol. Nat. Sci. 2018, 32, 63–71. [Google Scholar]
- Meng, L.; Zhu, X.; Sun, X.; Li, L.; Jiang, L. Analysis on Factors Affecting Drivers’ Steering Evasive Maneuvers in Real Traffic Risk Scenarios. Automob. Technol. 2016, 489, 59–62. [Google Scholar]
- Li, L.; Zhu, X.; Chen, H. Drivers’ Collision Avoidance Limit by Braking and Steering. J. Tongji Univ. Nat. Sci. 2016, 44, 1743–1748. [Google Scholar]
- Hussain, Q.; Dias, C.; Al-Shahrani, A.; Hussain, I. Safety Analysis of Merging Vehicles Based on the Speed Difference between on-Ramp and Following Mainstream Vehicles Using NGSIM Data. Sustainability 2022, 14, 16436. [Google Scholar] [CrossRef]
- Qu, D.; Wang, S.; Liu, H.; Meng, Y. A Car-Following Model Based on Trajectory Data for Connected and Automated Vehicles to Predict Trajectory of Human-Driven Vehicles. Sustainability 2022, 14, 7045. [Google Scholar] [CrossRef]
- Yu, Z. Automotive Theory, 5th ed.; China Machine Press: Beijing, China, 2009; pp. 98–100. [Google Scholar]
- Yuan, C.; Lin, Y.; Shen, J.; Chen, L.; Cai, Y.; He, Y.; Weng, S.; Wu, X.; Yuan, Y.; Gong, Y.; et al. Research on Active Collision Avoidance and Hysteresis Reduction of Intelligent Vehicle Based on Multi-Agent Coordinated Control System. World Electr. Veh. J. 2023, 14, 16. [Google Scholar] [CrossRef]
- Feng, M. Research on Vehicle Lane Changing Model Predictive Control Strategy Based on Lateral and Longitudinal Control. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- Wang, S.; Sun, W.; Liu, Z. Analysis on Lateral Acceleration of Lane Changing in Vehicle Stability. Mach. Des. Manuf. 2020, 353, 17–20+24. [Google Scholar]
- Li, Y.; Guo, C.; Li, Y.; Zhao, Y. Trajectory tracking control of autonomous vehicle based on steering and braking coordination. JSEE 2023, 45, 1185–1192. [Google Scholar]
- U.S. Department of Transportation Federal Highway Administration. Next Generation Simulation (NGSIM) Vehicle Trajec tories and Supporting Data. [Dataset] Provided by ITS DataHub through Data.transportation.gov. 2016. Available online: https://data.transportation.gov/Automobiles/Next-Generation-Simulation-NGSIM-Vehicle-Trajector/8ect-6jqj (accessed on 13 January 2023).
- Xia, Y.; Qin, Y.; Li, X.; Xie, J. Risk Identification and Conflict Prediction from Videos Based on TTC-ML of a Multi-Lane Weaving Area. Sustainability 2022, 14, 4620. [Google Scholar] [CrossRef]
- Humaidi, A.; Najem, H.; Al-Dujaili, A.; Pereira, D.; Ibraheem, I.; Azar, A. Social spider optimization algorithm for tuning parameters in PD-like Interval Type-2 Fuzzy Logic Controller applied to a parallel robot. Meas. Control 2021, 54, 303–323. [Google Scholar] [CrossRef]
- Virant, M.; Ambrož, M. Universal Safety Distance Alert Device for Road Vehicles. Electronics 2016, 5, 19. [Google Scholar] [CrossRef] [Green Version]
- Liu, F. Research on AEB System Test under low Friction Condition Based on C-NCAP Test Method. Master’s Thesis, Chang′an University, Xi’an, China, 2022. [Google Scholar]
- Luo, C.; Wang, G.; Zhang, S.; Zhang, W. A Switching Strategy of Active Collision Avoidance Mode Based on Critical Safety Distance. J. Chongqing Univ. Technol. Nat. Sci. 2020, 34, 27–35. [Google Scholar]
- Li, W.; Guo, W.; Shi, X.; Lu, Y.; Zhang, Y. Vehicle Active Collision Avoidance System Based on Fuzzy Control and Simulation Verification. J. Chongqing Univ. Technol. Nat. Sci. 2021, 35, 28–36. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute Label | Attribute Definition |
|---|---|
| Vehicle_ID | Vehicle identification number. |
| Total_Frames | Total number of frames in which the vehicle appears in this data set. |
| Local_X | Lateral (X) coordinate of the front centre of the vehicle with respect to the left-most edge of the section in the direction of travel. |
| Local_Y | Longitudinal (Y) coordinate of the front centre of the vehicle with respect to the entry edge of the section in the direction of travel. |
| v_Class | Vehicle type: 1—motorcycle, 2—auto, 3—truck. |
| v_Vel | Instantaneous velocity of vehicle. |
| Frame ID | Frame Identification number. |
| Lane_ID | Current lane position of vehicle. |
| Preceding | Vehicle Id of the lead vehicle in the same lane. A value of ‘0’ represents no preceding vehicle. |
| Number | Parameters | Parameter Value | Quantity (Sets) | Distribution (%) |
|---|---|---|---|---|
| 1 | Lateral acceleration | >0.4 g | 648 | 44 |
| ≤0.4 g | 836 | 56 | ||
| 2 | Collision hazard | Yes | 237 | 37 |
| No | 480 | 63 | ||
| 3 | Main vehicle speed | >60 km/h | 138 | 58 |
| ≤60 km/h | 99 | 42 | ||
| 4 | Overlapping ratio | >50% | 150 | 64 |
| ≤50% | 87 | 36 | ||
| 5 | Braking behaviour | Yes | 132 | 55 |
| No | 105 | 45 | ||
| 6 | TTC | TTC > 3 s | 480 | 63 |
| 2 s < TTC < 3 s | 20 | 3 | ||
| 1 s < TTC < 2 s | 59 | 9 | ||
| TTC < 1 s | 158 | 25 |
| Longitudinal Braking Hazard Factor | Main Vehicle Speed | |||||
|---|---|---|---|---|---|---|
| MS1 | MS2 | MS3 | MS4 | MS5 | ||
| Road adhesion coefficient | RC1 | LF3 | LF3 | LF4 | LF4 | LF5 |
| RC2 | LF2 | LF2 | LF3 | LF4 | LF5 | |
| RC3 | LF1 | LF2 | LF3 | LF4 | LF4 | |
| RC4 | LF1 | LF2 | LF2 | LF4 | LF4 | |
| RC5 | LF1 | LF1 | LF2 | LF3 | LF4 | |
| Willingness to Change Lane to Avoid Collisions | Longitudinal Braking Hazard Factor | |||||
|---|---|---|---|---|---|---|
| LF1 | LF2 | LF3 | LF4 | LF5 | ||
| Overlap rate | OR1 | W5 | W5 | W5 | W5 | W5 |
| OR2 | W4 | W4 | W4 | W5 | W5 | |
| OR3 | W3 | W3 | W4 | W4 | W5 | |
| OR4 | W2 | W3 | W3 | W4 | W4 | |
| OR5 | W2 | W2 | W3 | W3 | W4 | |
| OR6 | W1 | W2 | W2 | W3 | W4 | |
| Parameter | Value | Unit |
|---|---|---|
| Vehicle Mass (m) | 1530 | kg |
| Inertia around the vertical shaft (Iz) | 1742 | kg∙m2 |
| Distance from c.g. to front axle (a) | 1.78 | m |
| Distance from c.g. to rear axle (b) | 1.37 | m |
| Centre of Gravity Height (H) | 0.54 | m |
| Vehicle width (WS) | 1.8 | m |
| Coefficient of air resistance (CD) | 0.27 | 1 |
| Coefficient of rolling resistance (Crr) | 0.01 | 1 |
| Frontal area (A) | 1.8 | m2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Bei, S.; Li, B.; Liu, T.; Daoud, W.; Tang, H.; Guo, J.; Zhu, Z. Research on Collision Avoidance Systems for Intelligent Vehicles Considering Driver Collision Avoidance Behaviour. World Electr. Veh. J. 2023, 14, 150. https://doi.org/10.3390/wevj14060150
Liu G, Bei S, Li B, Liu T, Daoud W, Tang H, Guo J, Zhu Z. Research on Collision Avoidance Systems for Intelligent Vehicles Considering Driver Collision Avoidance Behaviour. World Electric Vehicle Journal. 2023; 14(6):150. https://doi.org/10.3390/wevj14060150
Chicago/Turabian StyleLiu, Guosi, Shaoyi Bei, Bo Li, Tao Liu, Walid Daoud, Haoran Tang, Jinfei Guo, and Zhaoxin Zhu. 2023. "Research on Collision Avoidance Systems for Intelligent Vehicles Considering Driver Collision Avoidance Behaviour" World Electric Vehicle Journal 14, no. 6: 150. https://doi.org/10.3390/wevj14060150
APA StyleLiu, G., Bei, S., Li, B., Liu, T., Daoud, W., Tang, H., Guo, J., & Zhu, Z. (2023). Research on Collision Avoidance Systems for Intelligent Vehicles Considering Driver Collision Avoidance Behaviour. World Electric Vehicle Journal, 14(6), 150. https://doi.org/10.3390/wevj14060150