An Adaptable Engineering Support Framework for Multi-Functional Energy Storage System Applications




Abstract
:1. Introduction
2. ESS Application Development Process Using Modern Engineering Approaches
2.1. Realization of Multi-Functional ESS Applications
2.2. Application Engineering Using Modern Approaches
2.3. EMSOnto Development Process
2.4. Open Issues
- Information sources are not exploited: At the design stage control engineers dispose documents that support the design of EMS. This may correspond to files describing IED capabilities, smart grid use cases, communication networks, information models, etc. (e.g., IEC 61850, IntelliGrid, SGAM) [15,18,19]. Since those files contain requirements and important knowledge for the design process, control engineers manually need to import selected data into the EMS-templates. This repetitive manual work is time consuming and exposed to human errors. Hence, an automatic exchange between EMS-templates and other information sources is sought.
- Restricted inference: EMSOnto supports the identification of conflicts between use cases. However, this is not the only kind of inconsistency that would harm the suitable operation of EMS. For instance, the setting up of IED registers with a wrong unit value would also impact the correct operation. Besides this, the inference of important data to support the design of EMS’s control strategies is also missed. Since knowledge to be inferred depends on engineer’s needs a flexible customization of EMSOnto to enlarge inferred knowledge is desired.
- Limited generation of software artifacts: EMS-templates can be automatically transformed into models and code compliant with a specific power system simulator (i.e., MATLAB/Simulink). Nevertheless, software platforms to be targeted depend on best practices established for testing and validation. In the power system domain, those platforms involve controller platforms, co-simulation platforms, communication network simulators, etc. (e.g., IEC 61499, Mosaik, OMNET++) [20,21,22]. Therefore, generation of software artifacts, compatible with a large set of platforms, should be guaranteed.
3. Mechanisms to Automate and Increase Flexibility of EMSOnto
3.1. EMSOnto Expert Participation
3.2. Transformation Mechanisms and Techniques
3.2.1. Model-Driven Engineering in Power System Domain
3.2.2. UML Representation of EMS-Ontology
4. Analysis of a Use Case Example by an EMSOnto Expert
4.1. Use Case to Be Analyzed by the EMSOnto Expert
4.2. Requirements from Control Engineers
4.3. Analysis Phase: Analysis of Requirements
4.4. Realization Phase: Implementations Performed by EMSOnto Expert
4.4.1. Action 1: Extending the EMS-Ontology
4.4.2. Action 2: Enlargement of Inference Process
4.4.3. Action 3: Setting up of New EMS-Templates
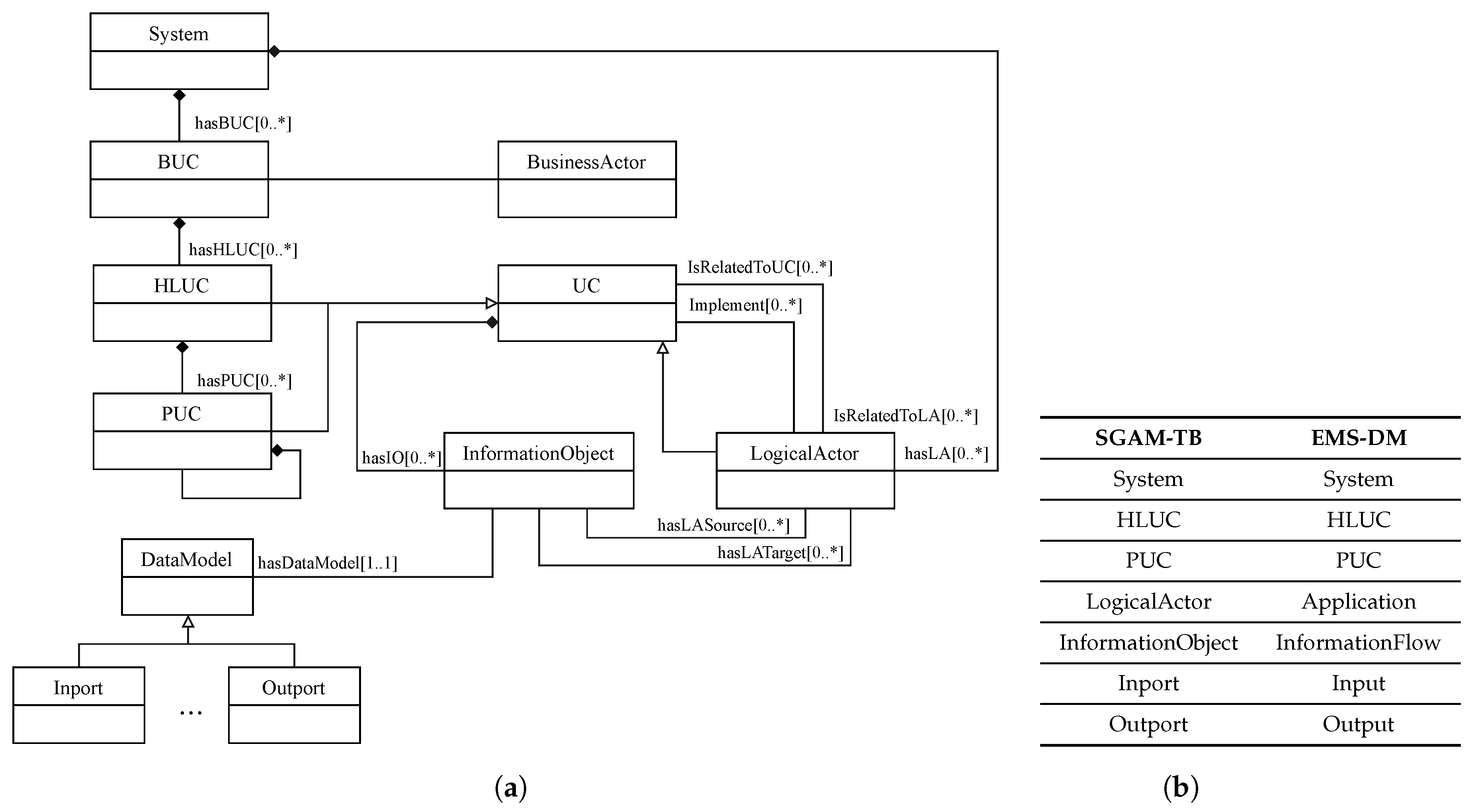
4.4.4. Action 4: Mapping Between SGAM-TB and EMS-DM
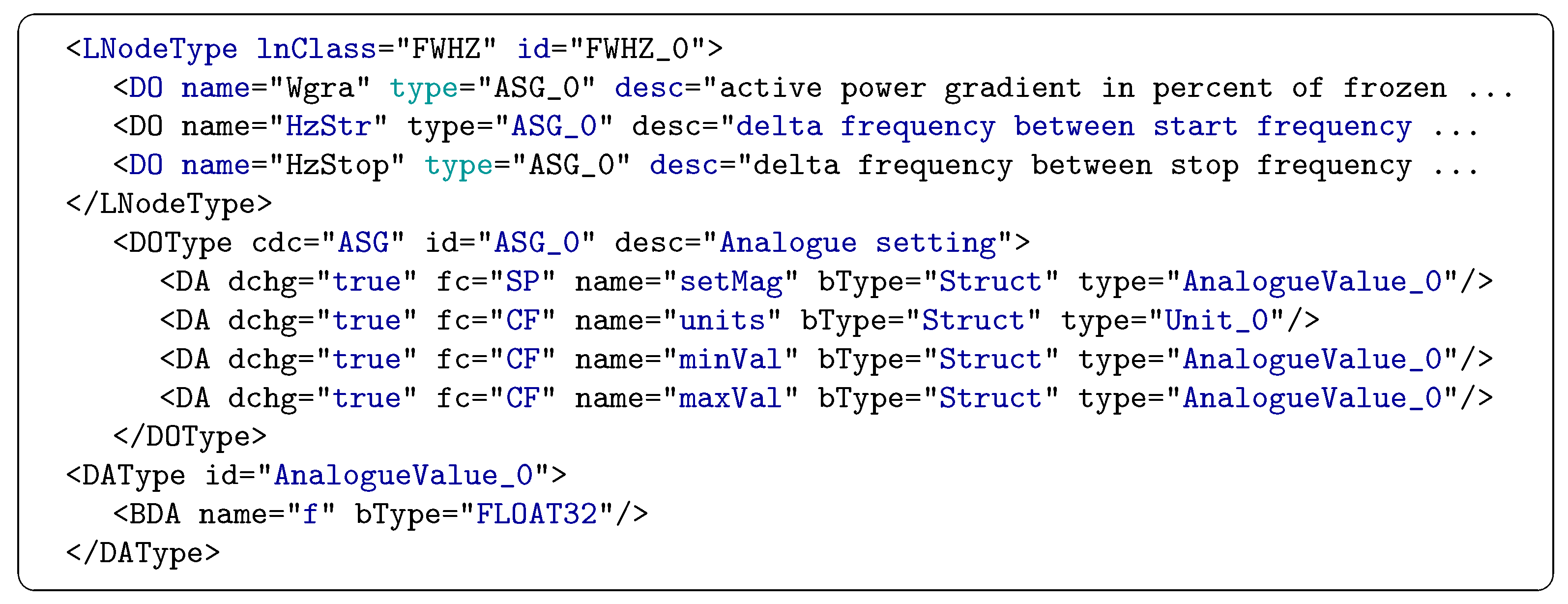
4.4.5. Action 5: Mapping Between IEC 61850 an EMS-DM
4.4.6. Action 6: Generation of Inconsistency Reports
4.4.7. Action 7: Software Artifacts Generation
5. CEMS Implemented with the Extended EMSOnto
5.1. EMS-Templates
5.2. UC and IED Repository
5.3. Constraints of the CEMS
5.4. Inconsistencies Report
5.5. SoC Estimator Function
5.6. Software Artifacts Generation
5.7. Evaluation of Requirements and Open Issues
6. Conclusions
- Define an ontology/data model of the EMS under study
- Integrate rules and queries to the ontology
- Propose a methodology to gather knowledge from the EMS
- Design data models for specific software platforms, IEDs, DERs, etc.
- Elaborate transformation rules for code/text and model generation
Author Contributions
Funding
Conflicts of Interest
References
- Alizadeh, M.; Parsa Moghaddam, M.; Amjady, N.; Siano, P.; Sheikh-El-Eslami, M. Flexibility in Future Power Systems with High Renewable Penetration: A Review. Renew. Sustain. Energy Rev. 2016, 57, 1186–1193. [Google Scholar] [CrossRef]
- Koller, M.; Borsche, T.; Ulbig, A.; Andersson, G. Review of Grid Applications with the Zurich 1MW Battery Energy Storage System. Electr. Power Syst. Res. 2015, 120, 128–135. [Google Scholar] [CrossRef]
- EERA Joint Programme on Smart Grids-Sub-Programme 4-Electrical Energy Technologies; Technical Report D4.3 Integration of Storage Resources to Smart Grids: Possible Services, D4.4 Control Algorithms for Storage Applications in Smart Grid; EERA: Brussels, Belgium, 2014.
- Zanabria, C.; Pröstl Andrén, F.; Strasser, T.I. Comparing Specification and Design Approaches for Power Systems Applications. In Proceedings of the 2018 IEEE PES Transmission and Distribution Conference and Exhibition—Latin America, Lima, Peru, 18–21 September 2018; p. 5. [Google Scholar]
- Santodomingo, R.; Uslar, M.; Goring, A.; Gottschalk, M.; Nordstrom, L.; Saleem, A.; Chenine, M. SGAM-Based Methodology to Analyse Smart Grid Solutions in DISCERN European Research Project. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Dubrovnik, Croatia, 13–16 May 2014; pp. 751–758. [Google Scholar] [CrossRef]
- Working Group Sustainable Processes (SG-CG/SP). CEN-CENELEC-ETSI Smart Grid Coordination GroupSustainableProcesses; Technical Report; CEN-CENELEC-ETSI: Brussels, Belgium, 2012. [Google Scholar]
- International Electrotechnical Commission (IEC). IEC 62559-2 Use Case Methodology-Part2: Definition of the Templates for Use Cases, Actor List and Requirement List; IEC: Geneva, Switzerland, 2015. [Google Scholar]
- Zanabria, C.; Pröstl Andrén, F.; Kathan, J.; Strasser, T.I. Rapid Prototyping of Multi-Functional Battery Energy Storage System Applications. Appl. Sci. 2018, 8, 1326. [Google Scholar] [CrossRef]
- Zanabria, C.; Pröstl Andrén, F.; Kathan, J.; Strasser, T. Approach for Handling Controller Conflicts within Multi-Functional Energy Storage Systems. In Proceedings of the CIRED-Open Access Proceedings Journal, Glasgow, UK, 12–15 June 2017; pp. 1575–1578. [Google Scholar]
- Andrén, F.P.; Strasser, T.I.; Kastner, W. Engineering Smart Grids: Applying Model-Driven Development from Use Case Design to Deployment. Energies 2017, 10, 374. [Google Scholar] [CrossRef]
- Tayyebi, A.; Bletterie, B.; Kupzog, F. Primary Control Reserve and Self-Sufficiency Provision with Central Battery Energy Storage Systens. In Proceedings of the NEIS Conference, Hamburg, Germany, 21–22 September 2017; pp. 21–22. [Google Scholar]
- Riffonneau, Y.; Bacha, S.; Barruel, F.; Ploix, S. Optimal Power Flow Management for Grid Connected PV Systems with Batteries. IEEE Trans. Sustain. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Boehm, B.; Turner, R. Balancing Agility and Discipline: A Guide for the Perplexed, Portable Documents; Addison-Wesley Professional: Boston, MA, USA, 2003. [Google Scholar]
- Andrén, F.; Lehfuss, F.; Strasser, T. A Development and Validation Environment for Real-Time Controller-Hardware-in-the-Loop Experiments in Smart Grids. Int. J. Distrib. Energy Resour. Smart Grids 2013, 9, 27–50. [Google Scholar]
- Gottschalk, M.; Uslar, M.; Delfs, C. The Use Case and Smart Grid Architecture Model Approach: The IEC 62559-2 Use Case Template and the SGAM Applied in Various Domains; Springer: New York, NY, USA, 2017. [Google Scholar]
- Weilkiens, T. Systems Engineering with SysML/UML: Modeling, Analysis, Design; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Tornelli, C.; Radaelli, L.; Rikos, E.; Uslar, M. WP 4 Fully Interoperable Systems Deliverable R4.1: Description of the Methodology for the Detailed Functional Specification of the ELECTRA Solutions; Technical Report. ELECTRA IRP, 2015. Available online: http://www.electrairp.eu/index.php?option=com_attachments&task=download&id=441 (accessed on 12 March 2017).
- Dänekas, C.; Neureiter, C.; Rohjans, S.; Uslar, M.; Engel, D. Towards a Model-Driven-Architecture Process for Smart Grid Projects. In Digital Enterprise Design & Management; Springer: New York, NY, USA, 2014; pp. 47–58. [Google Scholar]
- Higgins, N.; Vyatkin, V.; Nair, N.K.C.; Schwarz, K. Distributed Power System Automation With IEC 61850, IEC 61499, and Intelligent Control. IEEE Trans. Syst. Man Cybern. Part C 2011, 41, 81–92. [Google Scholar] [CrossRef]
- Zhabelova, G.; Vyatkin, V.; Dubinin, V. Towards Industrially Usable Agent Technology for Smart Grid Automation. IEEE Trans. Ind. Electron. 2014, 62, 2629–2641. [Google Scholar] [CrossRef]
- Schütte, S.; Scherfke, S.; Sonnenschein, M. MOSAIK—Smart Grid simulation API—Toward a Semantic Based Standard for Interchanging Smart Grid Simulations. In Proceedings of the 1st International Conference on Smart Grids and Green IT Systems, Porto, Portugal, 21 April 2012; SciTePress—Science and Technology Publications: Porto, Portugal, 2012; pp. 14–24. [Google Scholar] [CrossRef]
- Bhor, D.; Angappan, K.; Sivalingam, K.M. Network and Power-Grid Co-Simulation Framework for Smart Grid Wide-Area Monitoring Networks. J. Netw. Comput. Appl. 2016, 59, 274–284. [Google Scholar] [CrossRef]
- Kroetzsch, M.; Simancik, F.; Horrocks, I. A Description Logic Primer. arXiv, 2013; arXiv:1201.4089. [Google Scholar]
- Brambilla, M.; Cabot, J.; Wimmer, M. Model-Driven Software Engineering in Practice. Synth. Lect. Softw. Eng. 2012, 1, 1–182. [Google Scholar] [CrossRef]
- Andrén, F.; Strasser, T.; Kastner, W. Model-Driven Engineering Applied to Smart Grid Automation Using IEC 61850 and IEC 61499. In Proceedings of the Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–7. [Google Scholar]
- Zanabria, C.; Pröstl Andrén, F.; Kathan, J.; Strasser, T. Towards an Integrated Development of Control Applications for Multi-Functional Energy Storages. In Proceedings of the IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–4. [Google Scholar]
- Morales-Trujillo, M.E.; Oktaba, H.; Piattini, M. The making of an OMG standard. Comput. Stand. Interfaces 2015, 42, 84–94. [Google Scholar] [CrossRef]
- Horrocks, I.; Kutz, O.; Sattler, U. The Even More Irresistible SROIQ. Kr 2006, 6, 57–67. [Google Scholar]
- Brockmans, S.; Volz, R.; Eberhart, A.; Löffler, P. Visual modeling of OWL DL ontologies using UML. In Proceeding of the International Semantic Web Conference, Hiroshima, Japan, 7–11 November 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 198–213. [Google Scholar]
- Andren, F.; Brundlinger, R.; Strasser, T. IEC 61850/61499 Control of Distributed Energy Resources: Concept, Guidelines, and Implementation. IEEE Trans. Energy Convers. 2014, 29, 1008–1017. [Google Scholar] [CrossRef]
- Franke, R.; Wiesmann, H. Flexible Modeling of Electrical Power Systems—The Modelica PowerSystems Library. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; pp. 515–522. [Google Scholar] [CrossRef]
- Buscher, M.; Kube, M.; Piech, K.; Lehnhoff, S.; Rohjans, S.; Fischer, L. Towards Smart Grid-Ready Substations: A Standard-Compliant Protection System. In Proceedings of the 2016 Power Systems Computation Conference (PSCC), Genoa, Italy, 20–24 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Fiaschetti, L.; Antunez, M.; Trapani, E.; Valenzuela, L.; Rubiales, A.; Risso, M.; Boroni, G. Monitoring and Controlling Energy Distribution: Implementation of a Distribution Management System Based on Common Information Model. Int. J. Electr. Power Energy Syst. 2018, 94, 67–76. [Google Scholar] [CrossRef]
- Divya, K.; Østergaard, J. Battery Energy Storage Technology for Power Systems—An Overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Braam, F.; Diazgranados, L.M.; Hollinger, R.; Engel, B.; Bopp, G.; Erge, T. Distributed Solar Battery Systems Providing Primary Control Reserve. IET Renew. Power Gen. 2016, 10, 63–70. [Google Scholar] [CrossRef]
- Slimani, T. Ontology Development: A Comparing Study on Tools, Languages and Formalisms. Indian J. Sci. Technol. 2015, 8. [Google Scholar] [CrossRef]
- Hitzler, P.; Krotzsch, M.; Rudolph, S. Foundations of Semantic Web Technologies; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Neureiter, C.; Uslar, M.; Engel, D.; Lastro, G. A Standards-Based Approach for Domain Specific Modelling of Smart Grid System Architectures. In Proceedings of the 2016 11th System of Systems Engineering Conference (SoSE), Kongsberg, Norway, 12–16 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Horrocks, I.; Patel-Schneider, P.F.; Boley, H.; Tabet, S.; Grosof, B. SWRL: A Semantic Web Rule Language Combining OWL and RuleML. W3C Member Submission, 21 May 2004; 79. [Google Scholar]
- Paul, G.; Alexandre, P.; Axel, P. SPARQL 1.1 Update; W3C: Cambridge, MA, USA, 2013; Volume 21. [Google Scholar]
- IEC. Communication Networks and Systems for Power Utility Automation. Part 7-4: Basic Communication Structure—Compatible Logical Node Classes and Data Object Classes; IEC: Geneva, Switzerland, 2010. [Google Scholar]
- IEC. Communication Networks and Systems for Power Utility Automation. Part 7-3: Basic Communication Structure-Common Data Classes; IEC: Geneva, Switzerland, 2011. [Google Scholar]
- Gearon, P.; Passant, A.; Polleres, A. SPARQL 1.1 Query Language; W3C Recommendation; W3C: Cambridge, MA, USA, 2013; Volume 21. [Google Scholar]
- Massif: MATLAB Simulink Integration Framework for Eclipse. 2016. Available online: https://github.com/viatra/massif (accessed on 12 March 2017).
- International Electrotechnical Commission. IEC 61499-1/Ed.2: Function Blocks—Part 1: Architecture; Standard; IEC: Geneva, Switzerland, 2012. [Google Scholar]
- Van Amstel, M.; Bosems, S.; Kurtev, I.; Ferreira Pires, L. Performance in Model Transformations: Experiments with ATL and QVT. In Theory and Practice of Model Transformations; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany; Zurich, Switzerland, 2011; pp. 198–212. [Google Scholar]
- International Electrotechnical Commission (IEC). IEC/TR 61850-90-7—Communication Networks and Systems for Power Utility Automation—Part 90-7: Object Models for Power Converters in Distributed Energy Resources (DER) Systems; IEC: Geneva, Switzerland, 2013. [Google Scholar]
- Uslar, M.; Specht, M.; Dänekas, C.; Trefke, J.; Rohjans, S.; González, J.M.; Rosinger, C.; Bleiker, R. Standardization in Smart Grids; Power Systems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Gayathri, K.; Easwarakumar, K.; Elias, S. Probabilistic Ontology Based Activity Recognition in Smart Homes Using Markov Logic Network. Knowl. Based Syst. 2017, 121, 173–184. [Google Scholar] [CrossRef]
- Baader, F.; Borgwardt, S.; Lippmann, M. Temporal query entailment in the description logic SHQ. Web Semant. 2015, 33, 71–93. [Google Scholar] [CrossRef]
- Brunelière, H.; Cabot, J.; Dupé, G.; Madiot, F. MoDisco: A Model Driven Reverse Engineering Framework. Inf. Softw. Technol. 2014, 56, 1012–1032. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DL () | UML |
|---|---|
| concept | class |
| concept subsumption (⊑) | generalization |
| data type | datatype |
| role | association, composition, aggregation |
| concrete role | attribute |
| Concepts, Roles, OWL Axioms | Description |
|---|---|
| , | InformationFlow represents information exchanged between UCs. Hence, the role hasFlow relates the concepts UC and InformationFlow. InformationFlow owns one Output as source and one Input as target. A formal representation of this requires the use of qualified number restrictions constructor (≤ n , R is a role and C is a concept) [23]. |
| Concepts, Roles, OWL Axioms | Description |
|---|---|
, , | A Constraint owns Variables, this relation is represented by hasConstVar. The inverse role of hasConstVar is given by hasVarConst. The role IsConsLinkCons relates Constraints and the transitivity property () is assigned to it. |
| , | A Variable belongs to a Constraint is represented by hasVarConst. A Variable can inherit Constraints from other Variables, this inference is achieved by complex role inclusion axioms (, being , and roles). |
| Concepts, Roles, OWL Axioms | Description |
|---|---|
| Vnom and SoC represent a nominal voltage (e.g., ) and a state of charge (e.g., ) respectively. P models an active power (e.g., ) and I a current value (e.g., ). | |
| SoCini represents an initial SoC (e.g., ), CAh models the full capacity of an energy storage device (e.g., ). | |
| Capacity assigned to a UC is represented by CAh_UC (e.g., ). | |
| , | The role IsConnectedTo relates two applications and the role ControlBESS relates a HLUC that is connected to a BESS. |
| hasI_O gathers information about whether or not a variable of type Internal is assigned to an Input or Output. Thereby, variables affected by this role are those subsumed by Internal (Param, State, …). |
| SWRL Rules | Description |
|---|---|
| r1: r | A Control inherits constraints assigned to the Setpoint that it targets. A setpoint variable owns the constraint , if is controlled by , then ?x1 inherits the constraint . |
| r2: | The role IsConsLinkCons is established when a relation between Costraints is detected. |
| SWRL Rules and SPARQL Update Query | Description |
|---|---|
| r3: EMS(?y) ∧ HLUC(?z) ∧ hasHLUC(?y,?z) ∧ BESS(?x) ∧ IsConnectedTo(?x,?y) ∧ hasControl(?z,?x1) ∧ Control(?x1) ∧ IsAssignedTo(?x1,?x2) ∧ P(?x2) ∧ hasVariable(?x,?x2) → ControlBESS(?z,?x) | If an EMS contains a HLUC that controls active power (P) of a BESS. Then, such HLUC and BESS are bound by ControlBESS. |
| r4: } | A PUC of type is added to a HLUC that controls a BESS. The name assigned to the new PUC is a concatenation of HLUC’s name and the string . For instance, a PUC called is assigned to a HLUC() named . |
| r5: } } | A BESS’s Status is assigned to a Feedback of the function PUC(). For simplicity, only the inference of relations between BESS’s and PUC() are shown. Thus, since is needed to calculate , a role IsAssignedTo representing the relation of Status() and PUC()’s Feedback is established. |
| UC | Variable | Description | Type | Const. | Const_Description | IsConsLink. |
|---|---|---|---|---|---|---|
| s | x | variables’s description | Setpoint | C | xx ≤ x | C |
| UC | Variable | Description | I_O | Type | Value | Format | Unit |
|---|---|---|---|---|---|---|---|
| BESS | CAh | total capacity of the battery | Status | CAh | double | Ah | |
| Vnom | nominal voltage of the battery | Status | Vnom | double | V | ||
| UC_generic | SoCini | initial SoC of the use case | Status | SoCini | double | % | |
| CAh | capacity assigned to a UC | Status | CAh_UC | double | Ah |
| UC | Variable | Description | I_O | Type | Value | Format | Unit |
|---|---|---|---|---|---|---|---|
| SoC_estimator | SoC_UC | SoC of a UC | Status | SoC | double | % | |
| I | current charged into the battery | Status | I | double | A | ||
| U_bat | voltage of the battery | Feedback | Vnom | double | V | ||
| CAh_bat | total capacity of a battery | Feedback | CAh | double | Ah | ||
| P_UC | active power set by a UC | Feedback | P | double | kW | ||
| SoC_ini | initial SoC of the UC | Feedback | SoCini | double | % | ||
| CAh_UC | capacity assigned to a UC | Feedback | CAh_UC | double | Ah |
| Query | Question | DL Query |
|---|---|---|
| What is the variable of type Pmax defined within a BESS? | ||
| What is the active power to be required by a service HLUC ()? |
| Query | Question | SPARQL Query |
|---|---|---|
| What are the setpoints of a HLUC? What is the unit configured within a setpoint ? What is the unit of a control variable targeting certain setpoint ? What are the units that mismatch? | } |
| EMS-DM | MATLAB/Simulink | IEC 61499 |
|---|---|---|
| System | SimulinkModel | System |
| UC, HLUC, PUC | SubSystem | FB, FBType |
| Application | SubSystem | Application |
| Input | Inport | InputVars |
| Output | Outport | OutputVars |
| InformationFlow | SingleConnection | Connection |
| Param | Property | InternalVars |
| System | Appl. | Application Description | Type | HLUC | HLUC Description | PUC |
|---|---|---|---|---|---|---|
| Sys | CEMS | customer energy management system | - | SelfC | power from the grid is avoided | PI_Control |
| - | FW | active power is injected to support frequency regulation | Limit_SoC | |||
| BESS | model of a BESS | BESS | - | - | - | |
| Meter | smart meter connected at PCC point | Meter | - | - | - |
| PUC | Variable | description | Type | Format | Min | Max | Unit |
|---|---|---|---|---|---|---|---|
| Linear-Control | Wgra | active power gradient in percent of frozen active power value per Hz | Setpoint | FLOAT32 | |||
| HzStr | delta frequency between start frequency and nominal frequency | Setpoint | FLOAT32 | ||||
| HzStop | delta frequency between stop frequency and nominal frequency | Setpoint | FLOAT32 |
| UC | Variable | Description | Type | IsAssignedBy | Const. | Const. Description | IsConsLink. |
|---|---|---|---|---|---|---|---|
| BESS | Pbat | active power | State | sp_Pref | C1 | PP ≤ P | C2 |
| Sbat | apparent power | State | C2 | P + Q≤ S | - |
| PUC | Variable | Description | Type | IsAssignedTo | Const. | Const. Description |
|---|---|---|---|---|---|---|
| Limit_SoC | ct_Pref | signal to control the charging/discharging of the BESS | Control | sp_Pref | C1 | PP ≤ P |
| C2 | P + Q ≤ S |
| Inconsistency | Detected | Conclusion Derived from Queries. | Control Engineer Analysis |
|---|---|---|---|
| Mismatches between a BESS and a service/ | X | The technical limitations of the BESS are not violated. | - |
| Units are misconfigured/ | ✓ | The unit of the control variable () is set to W and the unit configured in a setpoint () is . | Correction of the unit at the control level is required. |
| HLUC | PUC | Description | Type | Variable | Description |
|---|---|---|---|---|---|
| FW | FW_SoC | state of charge of a HLUC | SoC_estimator | CAh_UC | capacity assigned to a UC |
| SelfC | SelfC_SoC | state of charge of a HLUC | SoC_estimator | I | current charged into the battery |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zanabria, C.; Andrén, F.P.; Strasser, T.I. An Adaptable Engineering Support Framework for Multi-Functional Energy Storage System Applications. Sustainability 2018, 10, 4164. https://doi.org/10.3390/su10114164
Zanabria C, Andrén FP, Strasser TI. An Adaptable Engineering Support Framework for Multi-Functional Energy Storage System Applications. Sustainability. 2018; 10(11):4164. https://doi.org/10.3390/su10114164
Chicago/Turabian StyleZanabria, Claudia, Filip Pröstl Andrén, and Thomas I. Strasser. 2018. "An Adaptable Engineering Support Framework for Multi-Functional Energy Storage System Applications" Sustainability 10, no. 11: 4164. https://doi.org/10.3390/su10114164
APA StyleZanabria, C., Andrén, F. P., & Strasser, T. I. (2018). An Adaptable Engineering Support Framework for Multi-Functional Energy Storage System Applications. Sustainability, 10(11), 4164. https://doi.org/10.3390/su10114164