A Sustainable Power Plant Control Strategy Based on Fuzzy Extended State Observer and Predictive Control



Abstract
:1. Introduction
- (1)
- The nonlinearity of a 1000 MW USC boiler–turbine unit model is analyzed visually by using the V-gap metric.
- (2)
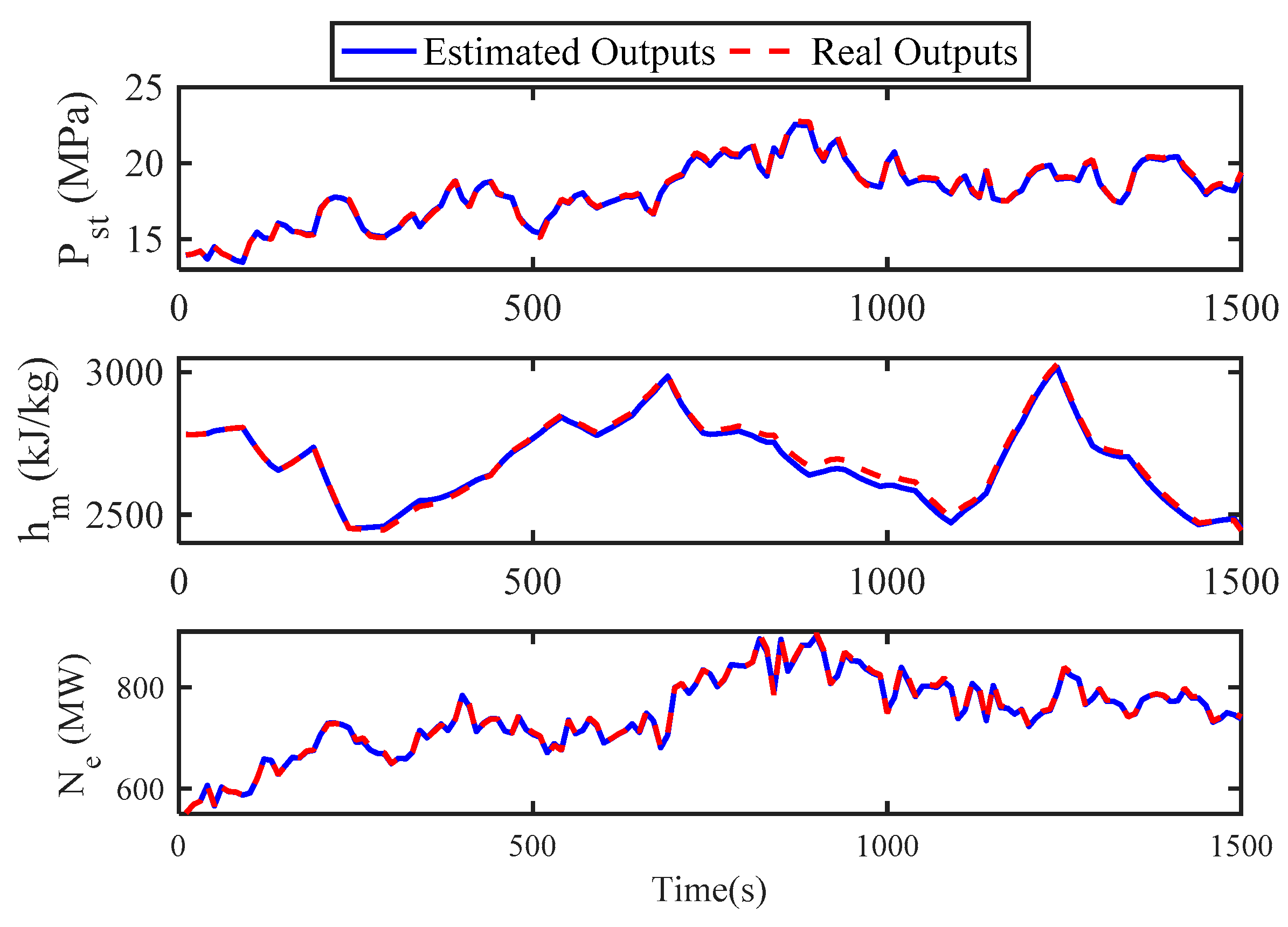
- Based on a Takagi–Sugeno (T–S) fuzzy model, a novel FESO, which is suitable for both single-input–single-output (SISO) and multi-input–multi-output (MIMO) systems, is proposed for the nonlinear system. Compared to the standard extended state observer (ESO), the proposed FESO can achieve a more precise observation performance. The advantages of the FESO are easy to determine by solving a series of linear matrix inequalities, guaranteeing the stability of the FESO.
- (3)
- An integrated FESO–SFPC strategy is devised for input-constrained nonlinear systems with unknown uncertainties, which brings a remarkable performance improvement. The disturbance rejection property of the proposed FESO–SFPC strategy is analyzed theoretically and verified through simulations. Simultaneously, the closed-loop stability is guaranteed.
2. Problem Formulation
2.1. System Description
2.2. Control Difficulties
3. Fuzzy ESO-Based Stable Fuzzy Predictive Control
3.1. Fuzzy Extended State Observer
3.2. Fuzzy ESO-Based Stable Fuzzy Predictive Control
| Algorithm 1: Proposed FESO–SFPC algorithm. |
| 1: Initialize: At , Initialize system states , inputs and observer states ; |
| 2: while do |
| 3: Solve problem (27) online with estimated states to obtain the optimal control input ; |
| 4: Apply the optimal control input to the system; |
| 5: Measure the current output ; |
| 6: Estimate based on , and by the proposed FESO (11); |
| 7: k = k + 1; |
| 8: end while |
| is the final time of running the algorithm. |
3.3. Disturbance Rejection Analysis
4. Simulation Results and Discussions
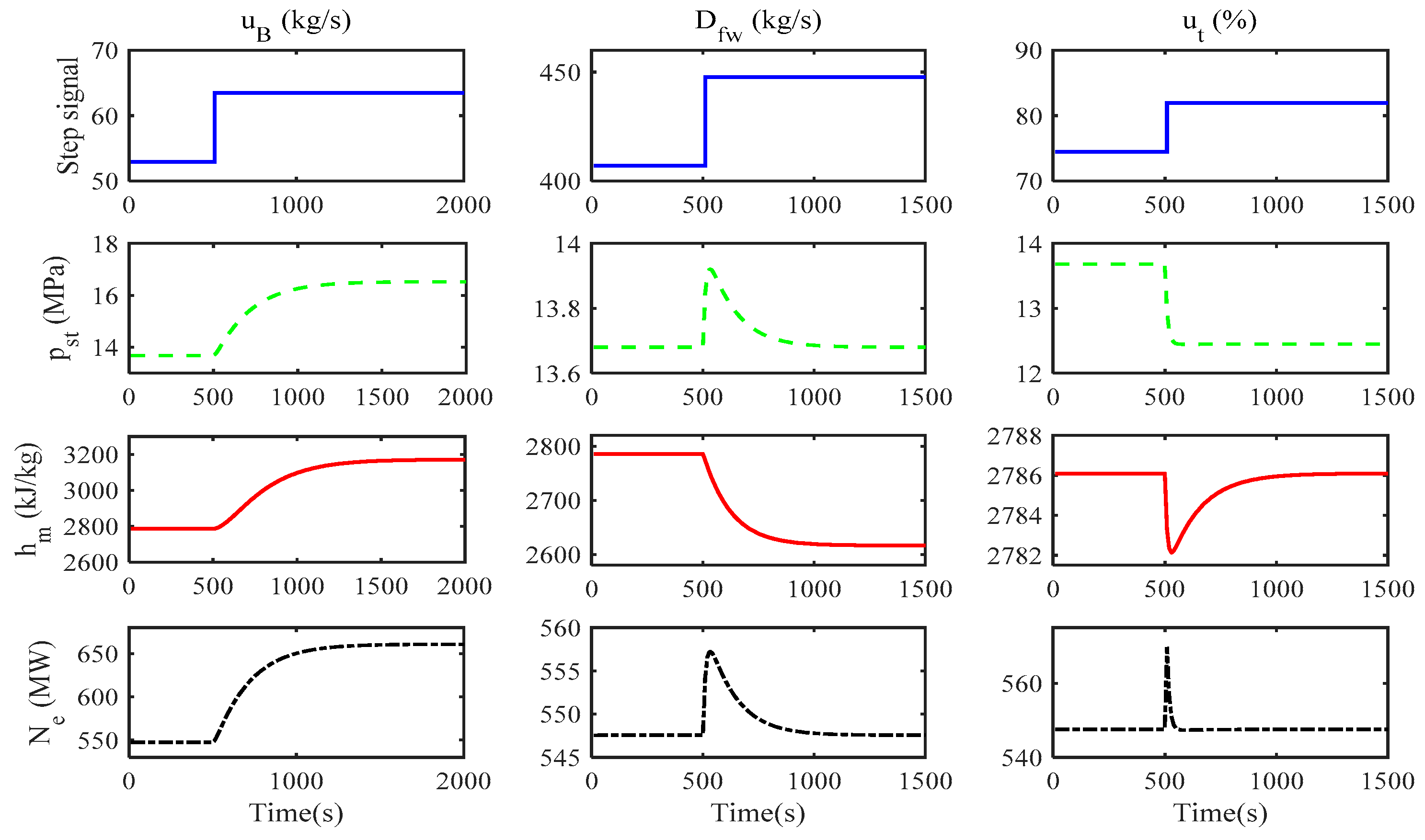
4.1. Modeling of the Boiler–Turbine System
4.2. Performance Evaluations and Discussions
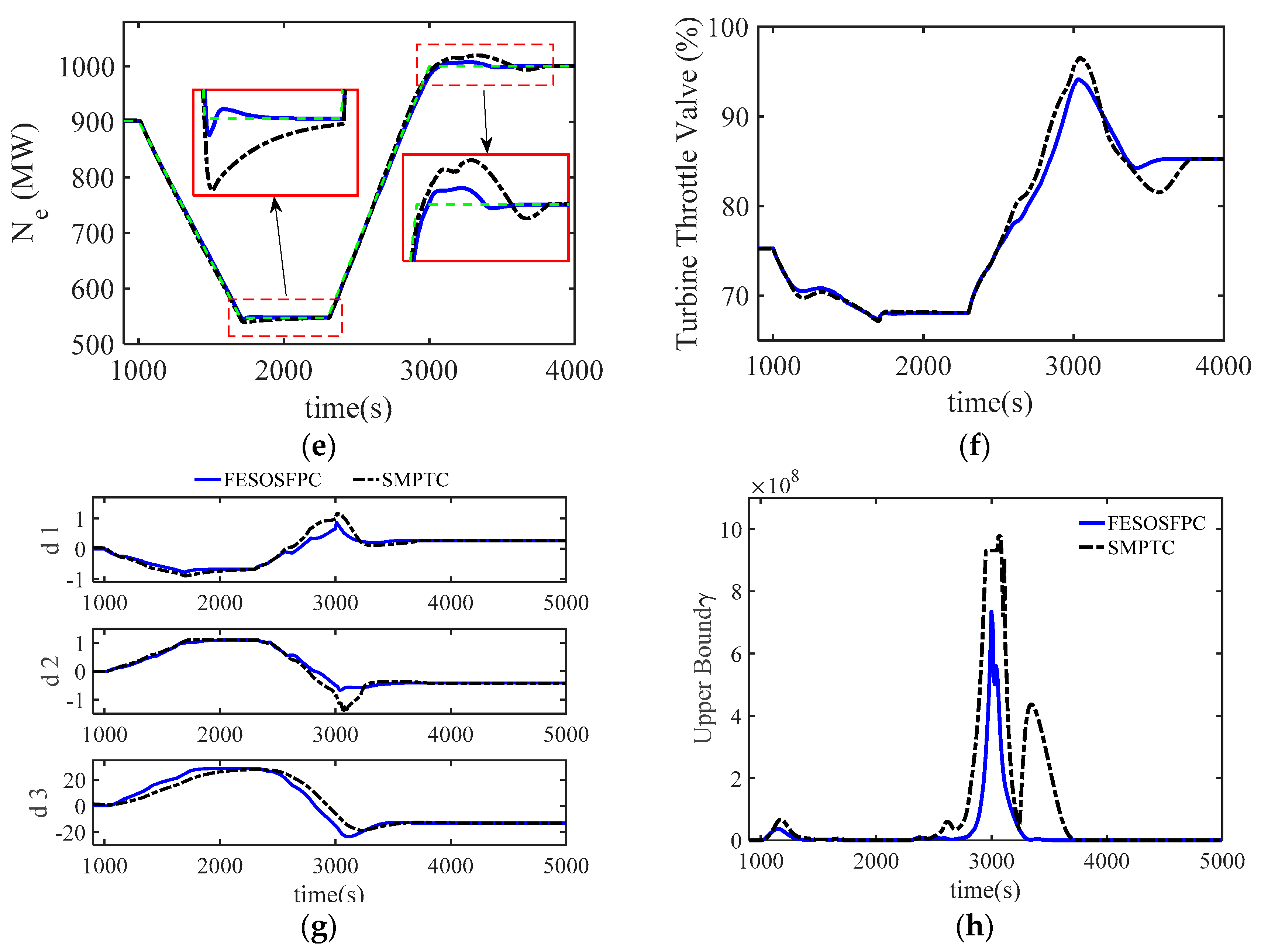
4.2.1. Simulation of Disturbance Rejection
- Case 1:
- A step-type disturbance on the turbine throttle valve .
- Case 2:
- A ramp-type disturbance on the water input channel .
- Case 3:
- A curve-type disturbance on the fuel input channel .
4.2.2. Simulation on Load Tracking
4.3. Parameter Effects on Control Performance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Theorem 1 and Theorem 3
Appendix B. Local Linear Models for T–S Fuzzy Model
References
- Wu, X.; Shen, J.; Li, Y.; Lee, K.Y. Steam power plant configuration, design, and control. Wiley Interdiscip. Rev. Energy Environ. 2015, 4, 537–563. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.; Shen, J.; Xue, Y.; Li, D.; Lee, K.Y. Multi-objective optimization for advanced superheater steam temperature control in a 300 MW power plant. Appl. Energy 2017, 208, 592–606. [Google Scholar] [CrossRef]
- Li, Y.; Shen, J.; Lee, K.Y.; Liu, X. Offset-free fuzzy model predictive control of a boiler-turbine system based on genetic algorithm. Simul. Model. Pract. Theory 2012, 26, 77–95. [Google Scholar] [CrossRef]
- Ma, L.; Lee, K.Y.; Wang, Z. Intelligent coordinated controller design for a 600 MW supercritical boiler unit based on expanded-structure neural network inverse models. Control Eng. Pract. 2016, 53, 194–201. [Google Scholar] [CrossRef]
- Ghabraei, S.; Moradi, H.; Vossoughi, G. Multivariable robust adaptive sliding mode control of an industrial boiler-turbine in the presence of modeling imprecisions and external disturbances: A comparison with type-I servo controller. ISA Trans. 2015, 58, 398–408. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.; Li, D.; Pan, L.; Xue, Y.; Lee, K.Y. Direct energy balance based active disturbance rejection control for coal-fired power plant. ISA Trans. 2017, 70, 486–493. [Google Scholar] [CrossRef]
- Ławryńczuk, M. Nonlinear predictive control of a boiler-turbine unit: A state-space approach with successive on-line model linearisation and quadratic optimisation. ISA Trans. 2017, 67, 476–495. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Xi, Y.-G.; Li, D.-W.; Lin, S. Model Predictive Control—Status and Challenges. Acta Autom. Sin. 2013, 39, 222–236. [Google Scholar] [CrossRef]
- Vafamand, N.; Khooban, M.H.; Dragičević, T.; Blaabjerg, F. Networked fuzzy predictive control of power buffers for dynamic stabilization of DC microgrids. IEEE Trans. Ind. Electron. 2019, 66, 1356–1362. [Google Scholar] [CrossRef]
- Khooban, M.H.; Vafamand, N.; Niknam, T.; Dragicevic, T.; Blaabjerg, F. Model-predictive control based on Takagi-Sugeno fuzzy model for electrical vehicles delayed model. IET Electr. Power Appl. 2017, 11, 918–934. [Google Scholar] [CrossRef]
- Khooban, M.-H.; Dragicevic, T.; Blaabjerg, F.; Delimar, M. Shipboard microgrids: A novel approach to load frequency control. IEEE Trans. Sustain. Energy 2018, 9, 843–852. [Google Scholar] [CrossRef]
- Mardani, M.M.; Khooban, M.H.; Masoudian, A.; Dragičević, T. Model Predictive Control of DC-DC Converters to Mitigate the Effects of Pulsed Power Loads in Naval DC Microgrids. IEEE Trans. Ind. Electron. 2018. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z. On the centrality of disturbance rejection in automatic control. ISA Trans. 2014, 53, 850–857. [Google Scholar] [CrossRef] [Green Version]
- Li, S. Disturbance Observer-Based Control—Methods and Applications; CRC Press, Inc.: Boca Raton, FL, USA, 2014. [Google Scholar]
- Pan, L.; Luo, J.; Cao, C.; Shen, J. L1 adaptive control for improving load-following capability of nonlinear boiler-turbine units in the presence of unknown uncertainties. Simul. Model. Pract. Theory 2015, 57, 26–44. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, X.; Shen, J. Extended state observer based fuzzy model predictive control for ultra-supercritical boiler-turbine unit. Appl. Therm. Eng. 2017, 118, 90–100. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, X.; Shen, J. Fuzzy disturbance rejection predictive control of ultra-supercritical once-through boiler-turbine unit. J. Southeast Univ. 2017, 33, 53–58. [Google Scholar]
- Liu, J.Z.; Yan, S.; Zeng, D.L.; Hu, Y.; Lv, Y. A dynamic model used for controller design of a coal fired once-through boiler-turbine unit. Energy 2015, 93, 2069–2078. [Google Scholar] [CrossRef]
- Georgiou, T.T. On the computation of the gap metric. In Proceedings of the 27th IEEE Conference on Decision and Control, Austin, TX, USA, 7–9 December 1988; pp. 1360–1361. [Google Scholar]
- Sun, L.; Li, D.; Lee, K.Y. Enhanced decentralized PI control for fluidized bed combustor via advanced disturbance observer. Control Eng. Pract. 2015, 42, 128–139. [Google Scholar] [CrossRef]
- Madoński, R.; Herman, P. Survey on methods of increasing the efficiency of extended state disturbance observers. ISA Trans. 2015, 56, 18–27. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Shen, J.; Hua, Q.; Lee, K.Y. Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Appl. Energy 2018, 231, 866–875. [Google Scholar] [CrossRef]
- Sun, L.; Wu, G.; Xue, Y.; Shen, J.; Li, D.; Lee, K.Y. Coordinated Control Strategies for Fuel Cell Power Plant in a Microgrid. IEEE Trans. Energy Convers. 2018, 33, 1–9. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.; Shen, J.; Xue, Y.; Li, D.; Lee, K.Y. A Combined Voltage Control Strategy for Fuel Cell. Sustainability 2017, 9, 1517. [Google Scholar] [CrossRef]
- Chiu, S.L. Fuzzy model identification based on cluster estimation. J. Intell. Fuzzy Syst. 1994, 2, 267–278. [Google Scholar]
- Wu, L.; Su, X.; Shi, P.; Qiu, J. A new approach to stability analysis and stabilization of discrete-time TS fuzzy time-varying delay systems. IEEE Trans. Syst. Man Cybern. Part B 2011, 41, 273–286. [Google Scholar] [CrossRef] [PubMed]
- Tseng, C.-S.; Chen, B.-S.; Uang, H.-J. Fuzzy tracking control design for nonlinear dynamic systems via TS fuzzy model. IEEE Trans. Fuzzy Syst. 2001, 9, 381–392. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.; Lee, K.Y. Fuzzy modeling and stable model predictive tracking control of large-scale power plants. J. Process Control 2014, 24, 1609–1626. [Google Scholar] [CrossRef]
- Zhang, T.; Feng, G.; Zeng, X.J. Output tracking of constrained nonlinear processes with offset-free input-to-state stable fuzzy predictive control. Automatica 2009, 45, 900–909. [Google Scholar] [CrossRef]
- Muske, K.R.; Badgwell, T.A. Disturbance modeling for offset-free linear model predictive control. J. Process Control 2002, 12, 617–632. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Representation | Unit |
|---|---|---|
| Pulverized coal flow rate that enters the boiler | kg/s | |
| Separator steam pressure | MPa | |
| Enthalpy | kJ/kg | |
| Throttle steam pressure | MPa | |
| Separator steam enthalpy | kJ/kg | |
| Active electric power | MW | |
| Fuel flow rate | kg/s | |
| Feed water flow rate | kg/s | |
| Turbine throttle valve opening | % |
| #1 | 13.68 | 2786.1 | 547.56 | 52.9 | 407.03 | 74.47 |
| #2 | 16.3 | 2751.5 | 650 | 62.48 | 492.31 | 74.25 |
| #3 | 18.23 | 2729 | 728.33 | 69.77 | 558.50 | 74.56 |
| #4 | 20.0 | 2710.0 | 800.0 | 76.422 | 619.97 | 74.88 |
| #5 | 22.54 | 2701.3 | 901.49 | 85.81 | 702.04 | 75.28 |
| #6 | 22.6 | 2698.0 | 1000 | 94.89 | 780.20 | 83.3 |
| Case | Method | IAE (pst) | IAE (hm) | IAE (Ne) |
|---|---|---|---|---|
| Case 1 | FESO–SFPC | 18.8 | 80.6 | 271.5 |
| ESO–FMPC | 63.7 | 846.6 | 1350.7 | |
| SMPTC | 31.2 | 99.4 | 316.6 | |
| Case 2 | FESO–SFPC | 0.4 | 2.6 | 9.8 |
| ESO–FMPC | 12.5 | 314.7 | 490.7 | |
| SMPTC | 0.5 | 3.1 | 11.3 | |
| Case 3 | FESO–SFPC | 0.51 | 2.2 | 8.9 |
| ESO–FMPC | 14.9 | 384.9 | 582.5 | |
| SMPTC | 2.2 | 11.7 | 19.2 | |
| Case 4 | FESO–SFPC | 131.1 | 264.7 | 829.5 |
| SMPTC | 1036.6 | 5009.6 | 9286.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Pan, L.; Liu, S.; Sun, L.; Lee, K.Y. A Sustainable Power Plant Control Strategy Based on Fuzzy Extended State Observer and Predictive Control. Sustainability 2018, 10, 4824. https://doi.org/10.3390/su10124824
Chen C, Pan L, Liu S, Sun L, Lee KY. A Sustainable Power Plant Control Strategy Based on Fuzzy Extended State Observer and Predictive Control. Sustainability. 2018; 10(12):4824. https://doi.org/10.3390/su10124824
Chicago/Turabian StyleChen, Chen, Lei Pan, Shanjian Liu, Li Sun, and Kwang Y. Lee. 2018. "A Sustainable Power Plant Control Strategy Based on Fuzzy Extended State Observer and Predictive Control" Sustainability 10, no. 12: 4824. https://doi.org/10.3390/su10124824
APA StyleChen, C., Pan, L., Liu, S., Sun, L., & Lee, K. Y. (2018). A Sustainable Power Plant Control Strategy Based on Fuzzy Extended State Observer and Predictive Control. Sustainability, 10(12), 4824. https://doi.org/10.3390/su10124824