Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa


Abstract
:1. Introduction
1.1. Surveying Tibetan Architectural Heritage
1.2. UAV-SfM Method for Architectural Heritage Surveys
- Camera calibration is a prerequisite for metric 3D reconstruction based on imagery. The camera’s interior parameters (e.g., principal points, principal distance, and radial lens distortion) are recovered during the process [19]. Depending on the research objectives, photogrammetry communities and computer vision communities have different approaches to camera calibration [20]. To achieve greater accuracy, the photogrammetry community prefers to conduct an independent calibration procedure prior to orienting the image. Coded targets are generally used to facilitate the manual or semi-automated detection of targets. The computer vision community employs simultaneous camera calibration and image orientation for automated applications. This procedure is known as self-calibration [21,22]. Coded targets are not required for self-calibration, since a feature-based camera calibration is conducted with the same images used to model the object. Feature-based camera calibration is preferred in architectural heritage surveying, because it speeds up the process of making field measurements and avoids having to place targets in inaccessible areas. Factors that are favorable to the accuracy of feature-based calibration include a convergent camera network with a large baseline-to-depth (B/D) ratio, image scale variations, and abundant detective features on survey objects [23].
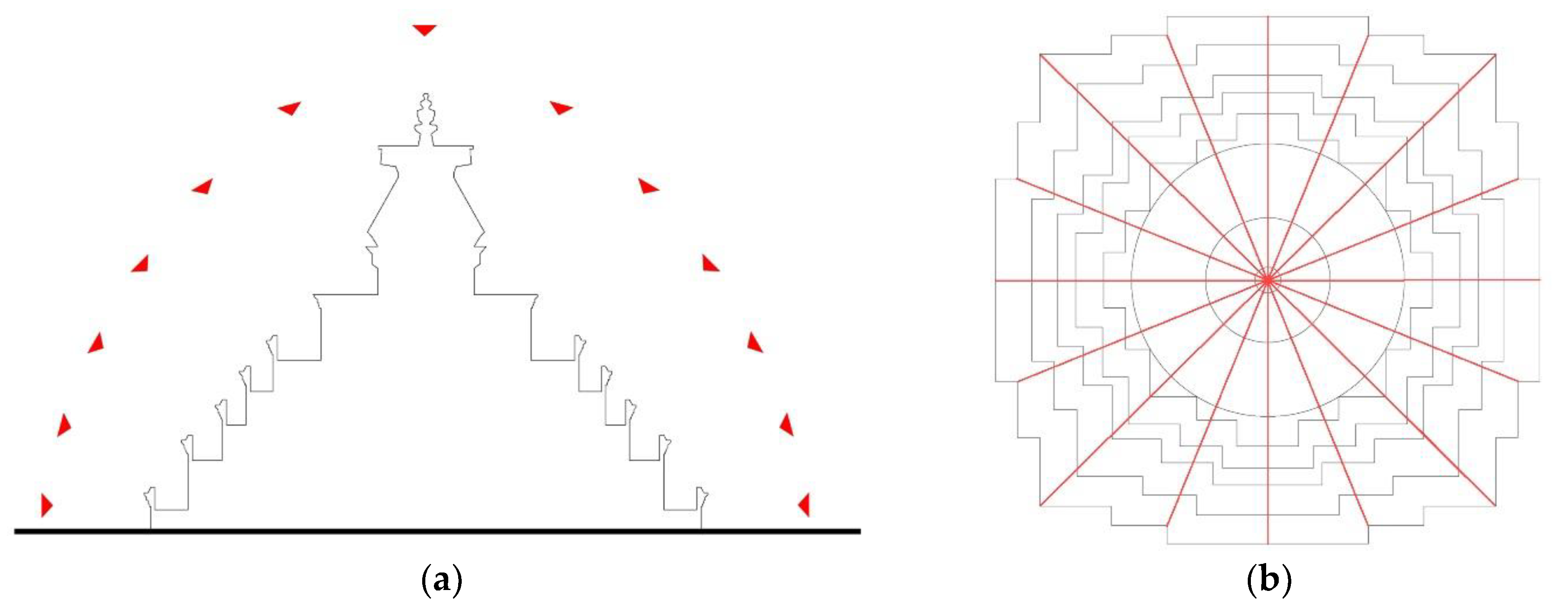
- The camera network refers to the geometric relationships of the objects being surveyed and the image block. It exerts a decisive influence on the accuracy of feature-based calibration. The use of nadir images for 2D objects (e.g., roofs or facades) to plan a camera network is quite straightforward [24,25,26], because only a few factors such as image overlaps and ground sample distances (GSDs) should be considered. It becomes much more complex in the case of 3D objects that require a convergent camera network with oblique images [27]. Issues such as lens tilting, image scale, and illumination transitions may influence the metric quality [28]. Until now, most UAV-SfM-based surveying for architectural heritage has employed only nadir images. Roofs and facades are photographed and modeled separately. This approach is not practical for architectural heritage surveying in Tibet, given the complexity of objects and the required field efficiency. An all-in-one camera network that can produce a complete 3D model is the most common requirement.
- In aerial image-based surveying, external constraints such as Global Navigation Satellite Systems/Inertial Navigation Systems (GNSS/INS) data and GCPs are used to geo-reference 3D results and minimize possible camera network deformation during bundle adjustment [29]. The Global Positioning Systems (GPSs) embedded in low-cost UAVs are not currently reliable. GCPs are widely employed for greater accuracy and can be measured using a total station (an electronic/optical instrument used in modern surveying) on either manually arranged targets or natural features on the object being surveyed. Ideally, a total station can measure the target with an accuracy of about 1.5 mm, but instrument performance, distance to target, and human error may lead to different results. As reported by [30], a large number of precise and evenly distributed GCPs enhance the accuracy of UAV-SfM-based surveying.
2. Materials and Methods
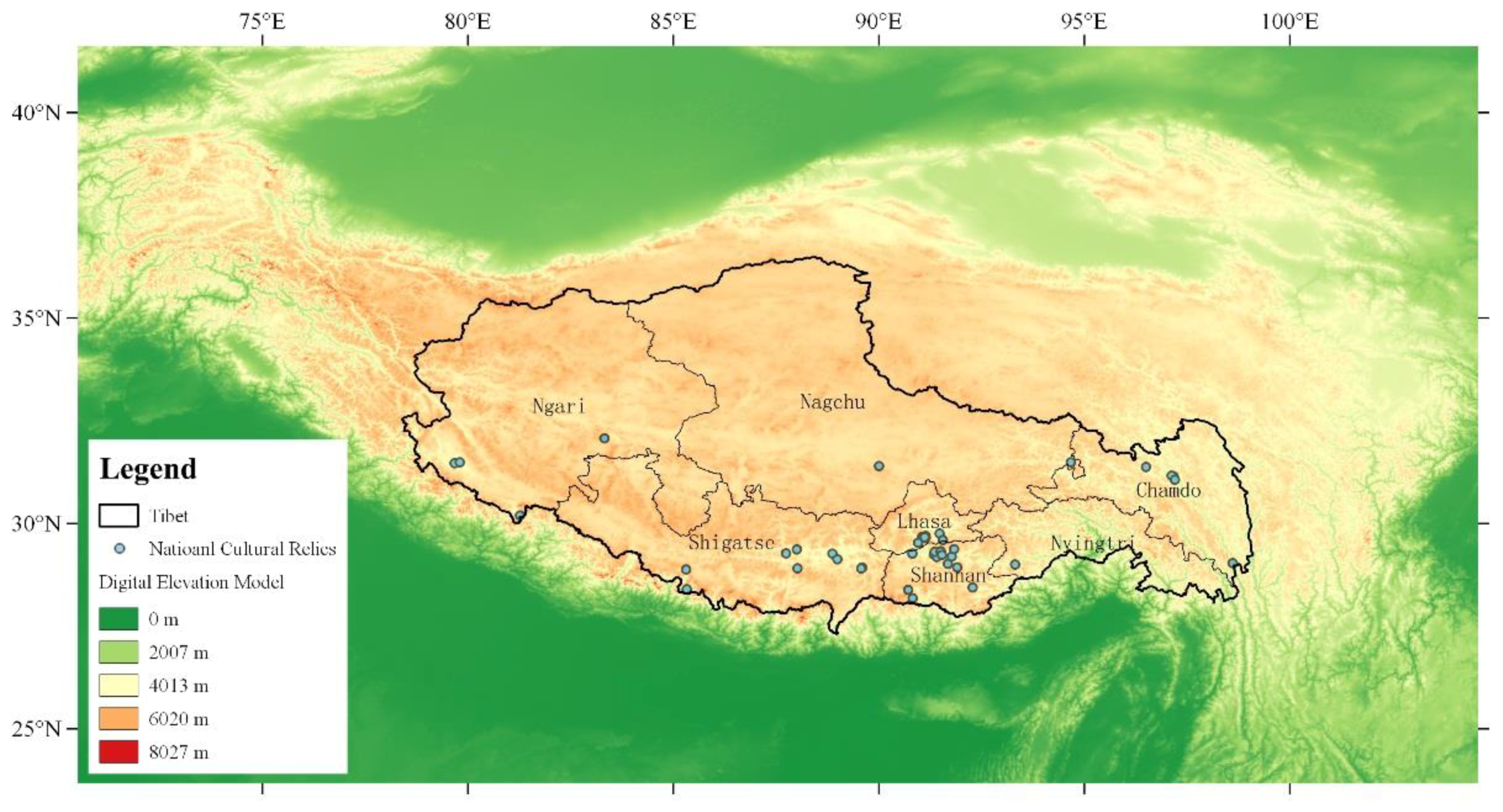
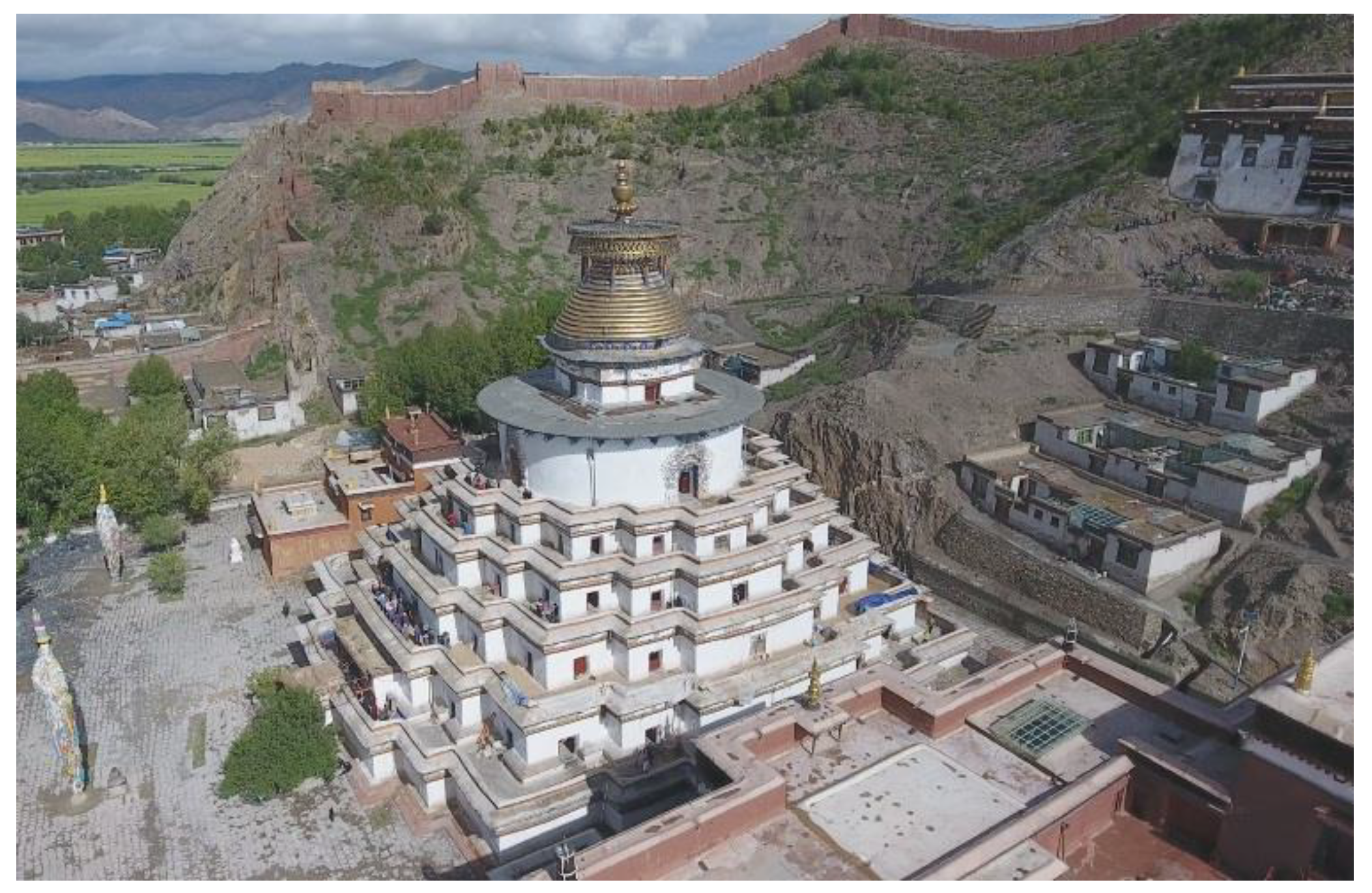
2.1. Architectural Study Site
2.2. UAV System and Image Acquisition
2.3. Reference Measurements
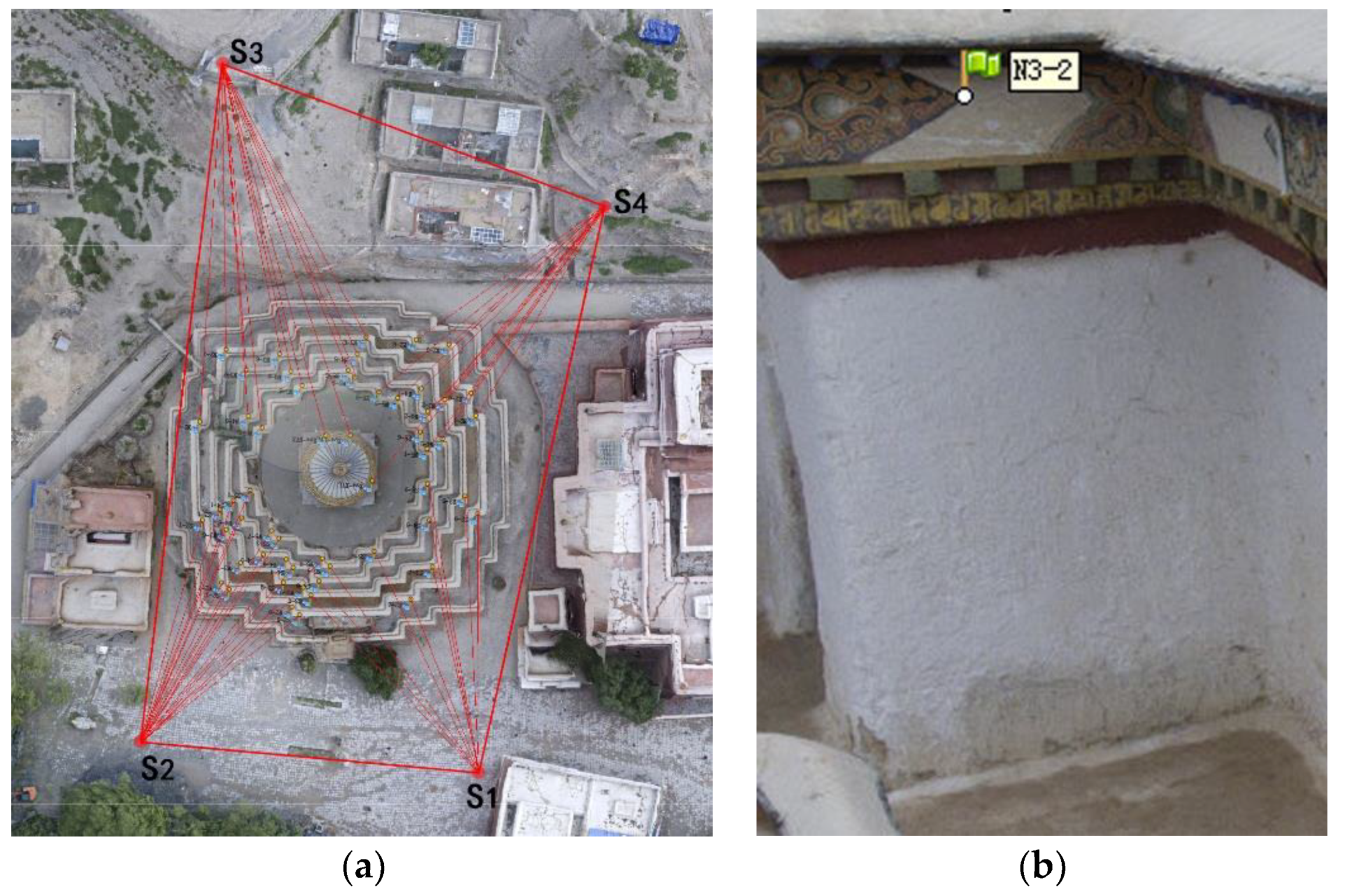
2.3.1. Measurement of GCPs
2.3.2. Laser Scanning
2.4. Data Processing
3. Results
- This method can be used to achieve sufficient accuracy (1/2500) for most architectural heritage surveying purposes.
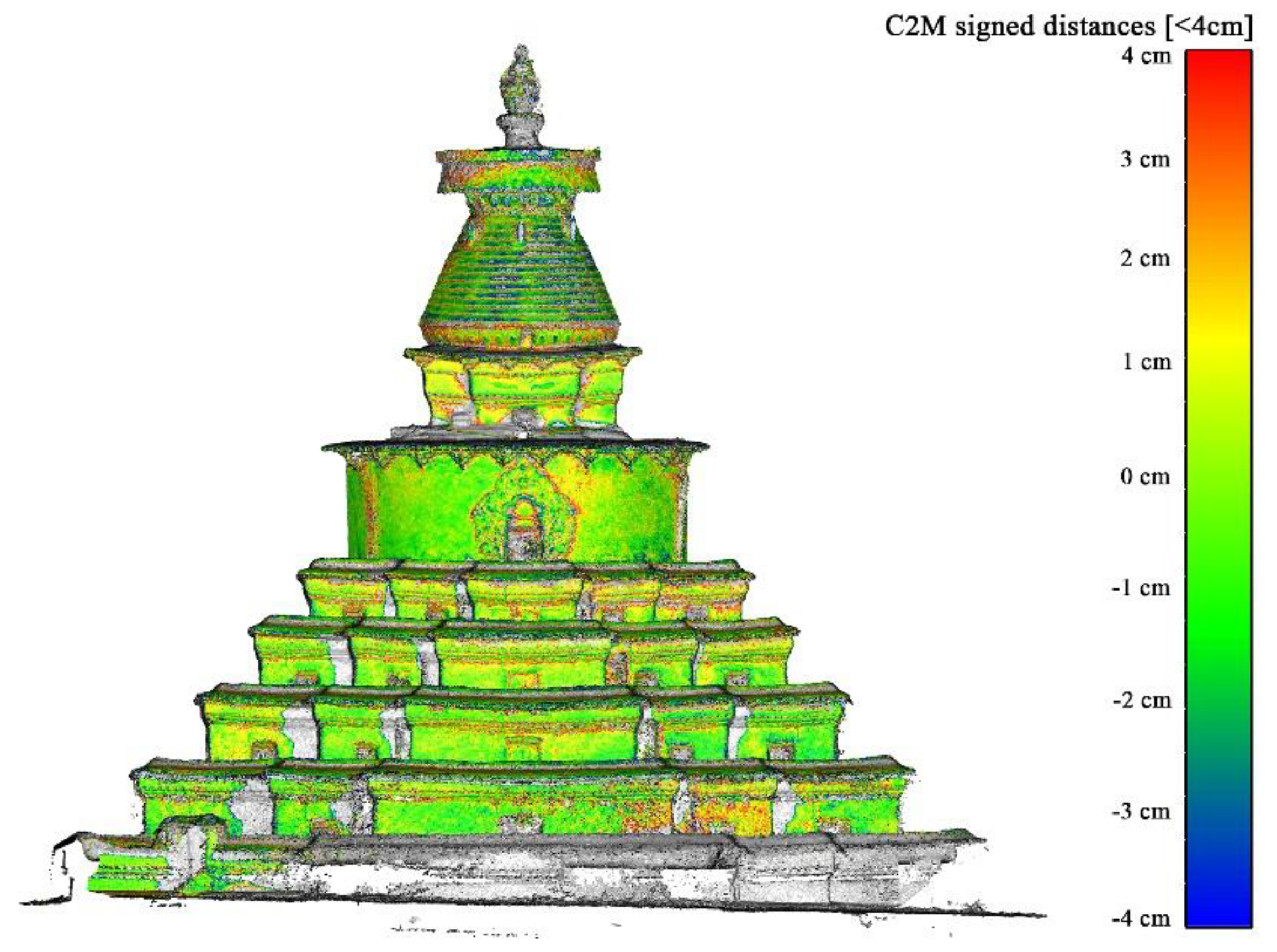
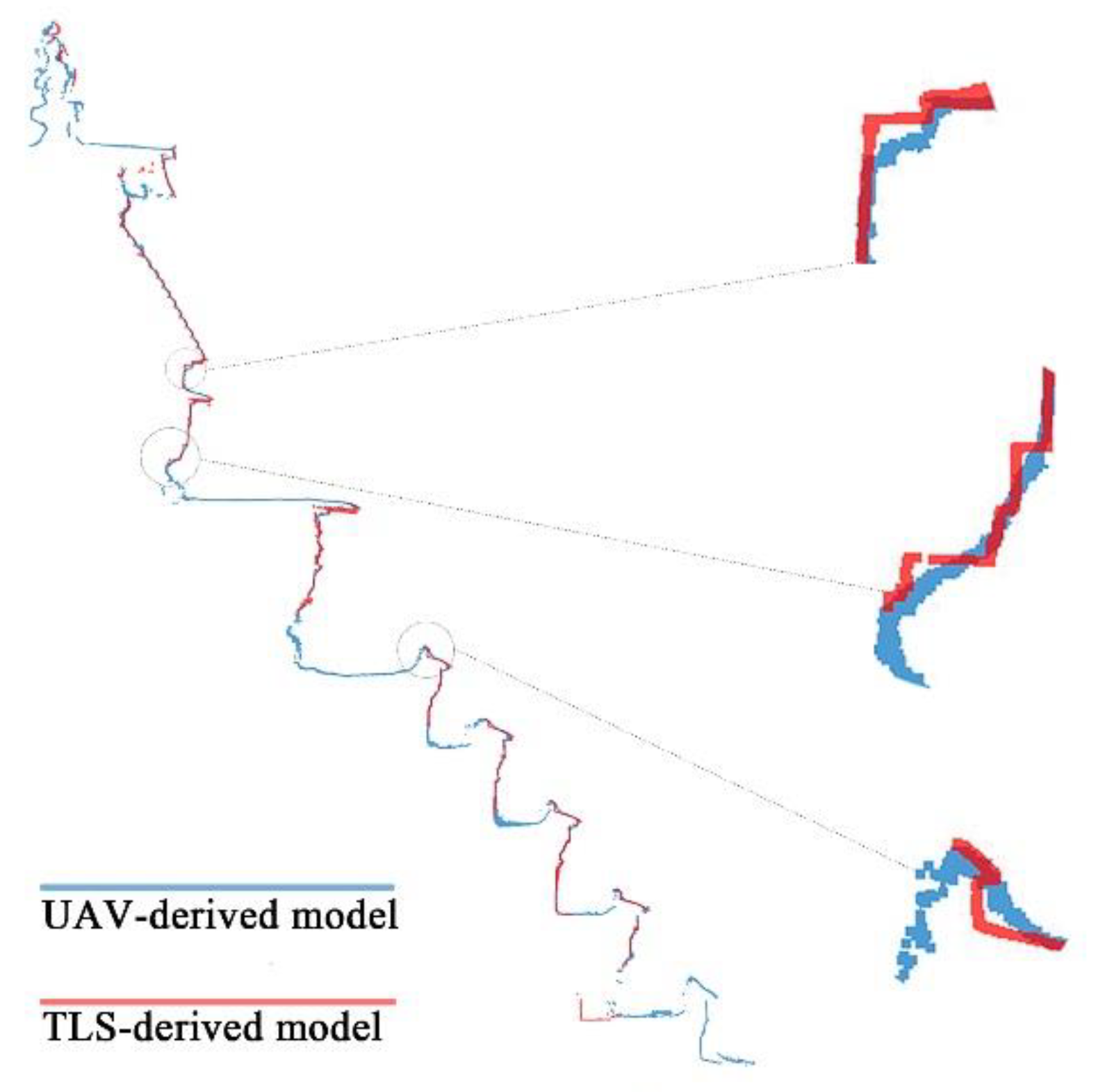
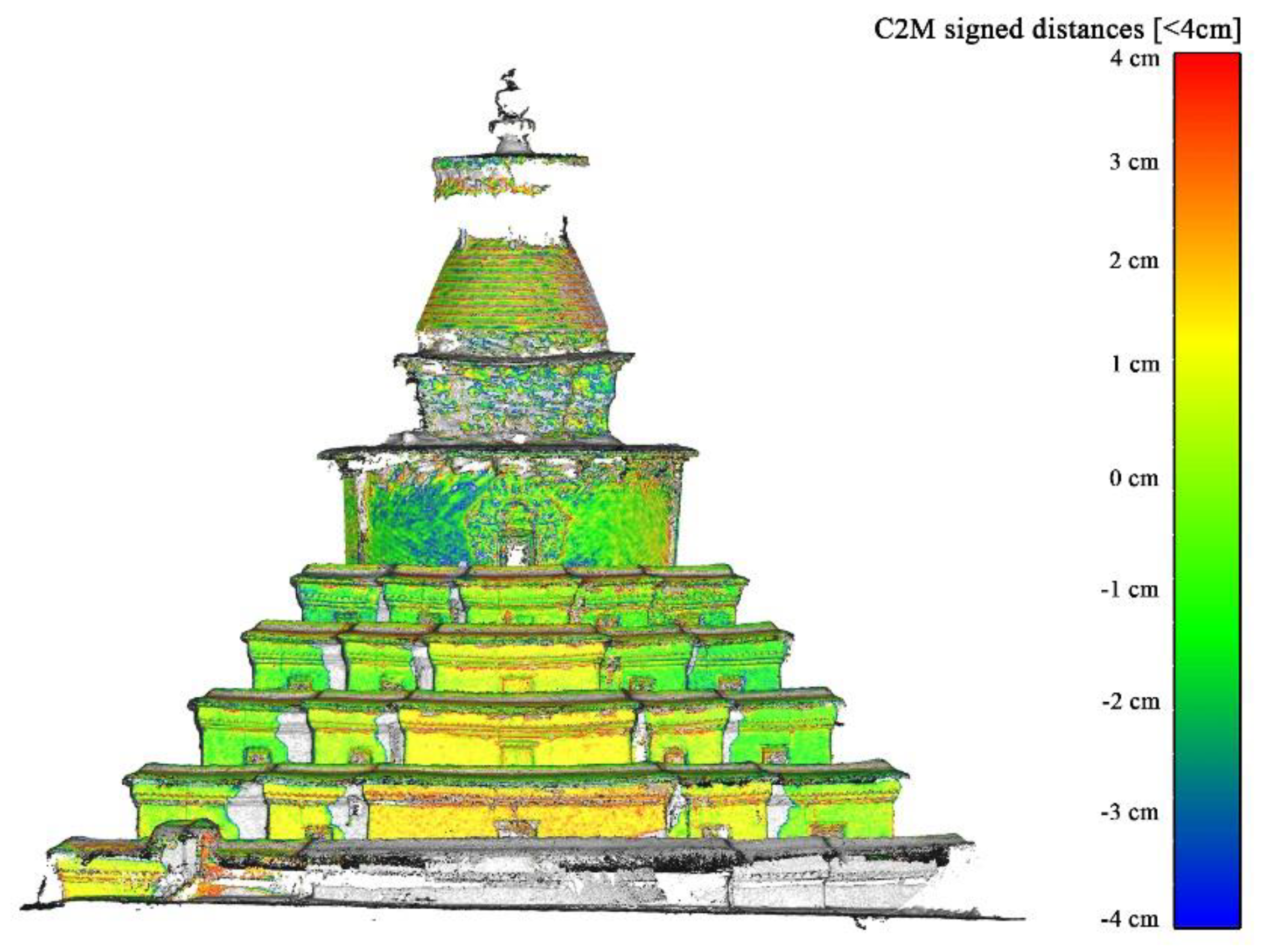
- The combined use of UAV and a total station can be an effective alternative to TLS when low-cost, portable, and fast on-field measurements are required (Table 2). Since the UAV-derived model fails to represent details on the stupa’s moldings, TLS is still necessary when extremely high accuracy and resolution are required.
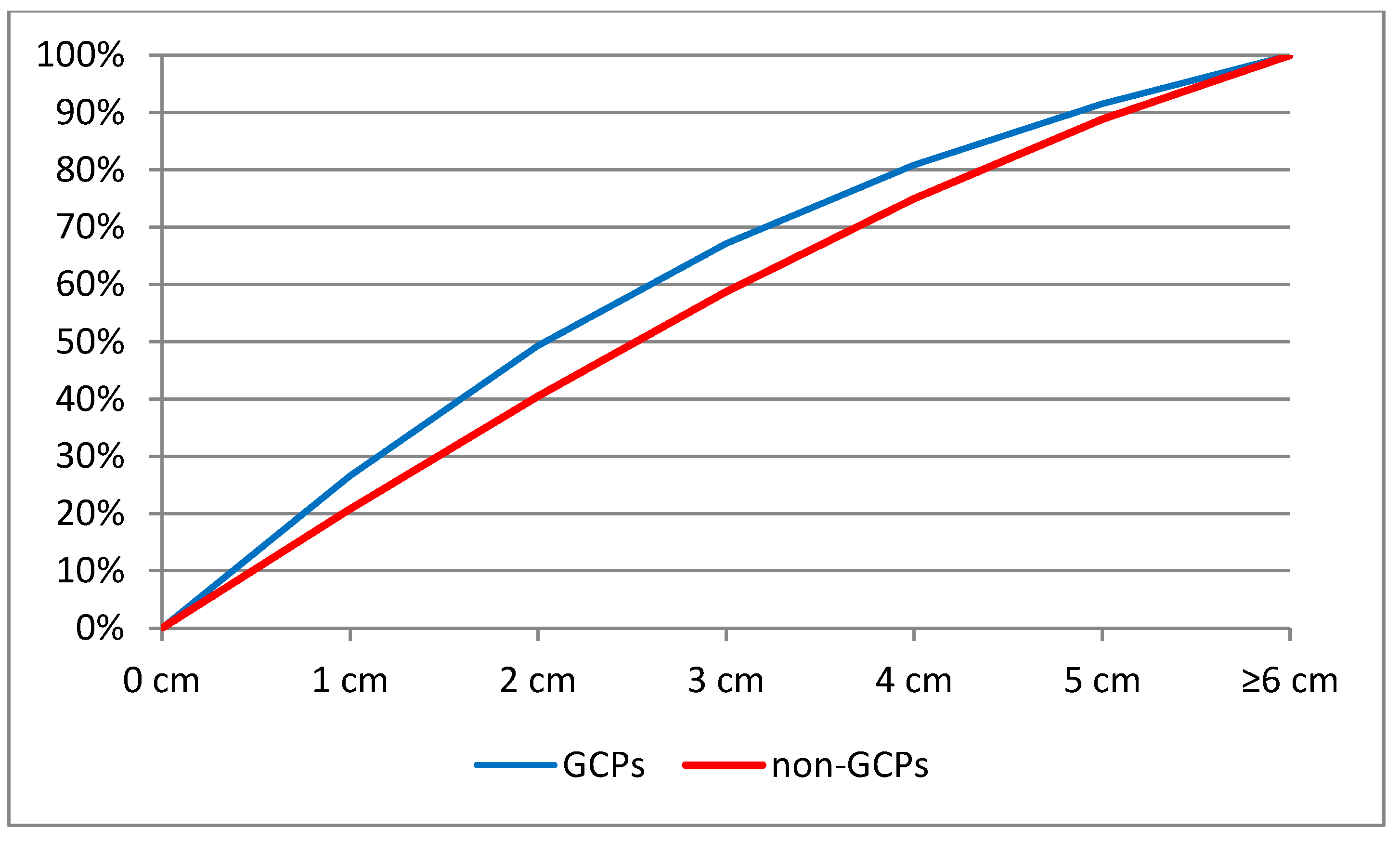
- To guarantee accuracy and completeness, GCPs are necessary for UAV-SfM. A sufficient number of GCPs should be evenly distributed in 3D spaces.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tucci, G. Tibetan Painted Scrolls, 2nd ed.; SDI: Bankok, Thailand, 1999; p. 798. ISBN 10: 1878529390. [Google Scholar]
- Tucci, G. The Tombs of Tibetan Kings, 1st ed.; Mimesis International: Rome, Italy, 1950; p. 185. ISBN 10: 885752678X. [Google Scholar]
- Wang, Y.P. Applications of computer-aided digitization and visualization in architectural heritage preservation-three years experience of surveying cultural relics in Tibet. In Proceedings of the Fourth Symposium of Chinese Society of the Forbidden City, Beijing, China, 12 June 2004; pp. 148–152. [Google Scholar]
- Sun, Z.; Cao, Y.K. Applications of integrated digital technologies for surveying Tibetan architectural heritage: Three years experience. In Proceedings of the 22nd CAADRIA Conference, Protocols, Flows, and Glitches, Suzhou, China, 5–8 April 2017; Janssen, P., Loh, P., Raonic, A., Schnabel, M.A., Eds.; id: caadria2017_029. pp. 663–672. [Google Scholar]
- Blais, F. Review of 20 years of range sensor development. J. Electron. Imaging 2004, 13, 231–244. [Google Scholar] [CrossRef]
- Vosselman, G.; Maas, H.G. Airborne and Terrestrial Laser Scanning; CRC Press: Boca Raton, FL, USA, 2010; p. 320. ISBN 10: 1439827982. [Google Scholar]
- Liu, C.; Liu, M.Y.; Wang, X.Y. Interpretation of measurement data of Wanfo Hall’s wooden structure of Zhenguo Temple in Pinyao. Chin. Archit. Hist. Rev. 2012, 1, 101–148. [Google Scholar]
- Tang, Y.Y.; Du, B.Y.; Ding, Y.H. Exploration on Application of 3D Laser Scan Data in the Protection of Heritage Building. J. Beijing Univ. Civ. Eng. Archit. 2011, 27, 1–6. [Google Scholar]
- Jing, L.; Qihheng, W. History of Architectural Heritage Survey in China; China Building Industry Press: Beijing, China, 2017. [Google Scholar]
- Zhang, Y.Y.; Sun, Z. Usability of architectural heritage surveying technologies in Tibet. Huazhong Archit. 2018, 36, 52–56. [Google Scholar]
- Sun, Z.; Cao, Y.K. Data processing workflows from low-cost digital survey to various applications: Three case studies of Chinese historic architecture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 409–416. [Google Scholar] [CrossRef]
- Trizzino, R.; Caprioli, M.; Mazzone, F.; Scarano, M. Applications of UAV Photogrammetric Surveys to Natural Hazard Detection and Cultural Heritage Documentation. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; Volume 19, p. 18091. [Google Scholar]
- Murtiyoso, A.; Grussenmeyer, P. Documentation of heritage buildings using close-range UAV images: Dense matching issues, comparison and case studies. Photogramm. Rec. 2017, 32, 206–229. [Google Scholar] [CrossRef]
- Petrie, G. Systematic oblique aerial photography using multiple digital cameras. Photogramm. Eng. Remote Sens. 2009, 75, 102–107. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2000; p. 655. ISBN 10: 0521540518. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2008, 280, 189–210. [Google Scholar] [CrossRef]
- Robertson, D.P.; Cipolla, R. Structure from motion. In Practical Image Processing and Computer Vision; Varga, M., Ed.; John Wiley: Hoboken, NJ, USA, 2008; p. 384. ISBN 10: 0470868562. [Google Scholar]
- Wu, C. Towards linear-time incremental structure from motion. In Proceedings of the 2013 International Conference on 3D Vision-3DV, Seattle, WA, USA, 29 June–1 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 127–134. [Google Scholar] [CrossRef]
- Clarke, T.A.; Fryer, J.G. The development of camera calibration methods and models. Photogramm. Rec. 1998, 16, 51–66. [Google Scholar] [CrossRef]
- Remondino, F.; Del Pizzo, S.; Kersten, T.P.; Triosi, S. Low-cost and open-source solutions for automated image orientation—A critical overview. In Proceedings of the Progress in Cultural Heritage Preservation Euro-Mediterranean Conference, Limassol, Cyprus, 29 October–3 November 2012; Ioannides, M., Fritsch, D., Leissner, J., Davies, R., Remondino, F., Caffo, R., Eds.; Springer: Berlin/Heidelberg, Germany; pp. 40–54. [Google Scholar] [CrossRef]
- Pollefeys, M.; Koch, R.; Van Gool, L. Self-calibration and metric reconstruction inspite of varying and unknown intrinsic camera parameters. Int. J. Comput. Vis. 1999, 32, 7–25. [Google Scholar] [CrossRef]
- Fraser, C.S. Automatic camera calibration in close range photogrammetry. Photogramm. Eng. Remote Sens. 2013, 79, 381–388. [Google Scholar] [CrossRef]
- Barazzetti, L.; Mussio, L.; Remondino, F.; Scaioni, M. Targetless Camera Calibration. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing, and Spatial Information Sciences, Trento, Italy, 2–4 March 2011; Volume XXXVIII-5/W16, pp. 335–342. [Google Scholar]
- Bolognesi, M.; Furini, A.; Russo, V.; Pellegrinelli, A.; Russo, P. Testing the low-cost RPAS potential in 3D cultural heritage reconstruction. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2015, 40, 229–235. [Google Scholar] [CrossRef]
- Ruggles, S.; Clark, J.; Franke, K.W.; Wolfe, D.; Reimshiiseel, B.; Martin, R.A.; Okeson, T.J.; Hedengren, J.D. Comparison of SfM Computer Vision Point Clouds of a Landslide Derived from Multiple Small UAV Platforms and Sensors to a TLS based Model. J. Unmanned Veh. Syst. 2016, 4, 246–265. [Google Scholar] [CrossRef]
- Thoeni, K.; Guccione, D.E.; Santise, M.; Giacomini, A.; Roncella, R.; Forlani, G. The Potential of Low-Cost Rpas for Multi-View Reconstruction of Sub-Vertical Rock Faces. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, XLI-B5, 909–916. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Rupnik, E.; Nex, F.; Remondino, F. Oblique multi-camera systems-orientation and dense matching issues. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Castelldefels, Spain, 11–14 February 2014; Volume XL-3/W1, p. 107. [Google Scholar]
- Gruen, A.; Beyer, H.A. System calibration through self-calibration. In Calibration and Orientation of Cameras in Computer Vision; Gruen, A., Huang, T.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 163–193. [Google Scholar]
- Caroti, G.; Zaragoza, I.M.E.; Piemonte, A. Accuracy assessment in structure from motion 3D reconstruction from UAV-born images: The influence of the data processing methods. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Toronto, ON, Canada, 30 August–2 September 2015; Volume XL-1/W4, p. 103. [Google Scholar]
- Waldhäusl, P.; Ogleby, C. 3 × 3 Rules for simple photogrammetric documentation of architecture. In Proceedings of the International Society for Photogrammetry and Remote Sensing, Comission V, Australian Photogrammetric and Remote Sensing Society Symposium, Melbourne, Australia, 1–4 March 1994; Volume 5, pp. 426–429. [Google Scholar]
- Gaiani, M.; Remondino, F.; Apollonio, F.I.; Ballabeni, A. An advanced pre-processing pipeline to improve automated photogrammetric reconstructions of architectural scenes. Remote Sens. 2016, 8, 178. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle adjustment—A modern synthesis. In International Workshop on Vision Algorithms; Springer: Berlin/Heidelberg, Germany, 1999; pp. 298–372. [Google Scholar]
- Wu, C.; Agarwal, S.; Curless, B.; Seitz, S.M. Multicore bundle adjustment. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 22 August 2011; pp. 3057–3064. [Google Scholar]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. 2013, 32, 29. [Google Scholar] [CrossRef]
- Murphy, M.; McGovern, E.; Pavia, S. Historic building information modelling (HBIM). Struct. Surv. 2009, 27, 311–327. [Google Scholar] [CrossRef]
- Eastman, C.; Teicholz, P.; Sacks, R.; Liston, L. BIM Handbook: A Guide to Building Information Modeling for Owners, Managers, Designers, Engineers and Contractors; John Wiley: Hoboken, NJ, USA, 2011; p. 648. ISBN 978-0-470-54137-1. [Google Scholar]
- Barazzetti, L. Parametric as-built model generation of complex shapes from point clouds. Adv. Eng. Inform. 2016, 30, 298–311. [Google Scholar] [CrossRef]
- Bruno, N.; Roncella, R. A Restoration Oriented HBIM System for Cultural Heritage Documentation: The Case Study of Parma Cathedral. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2018, XLII-2, 171–178. [Google Scholar] [CrossRef]
- Wang, Y.M.; Huo, H.; Wang, G.L.; Hu, C.M. Application of Terrestrial LIDAR Technology in the deformation analysis of Multi-Door chorten in Baiju Temple. J. Beijing Univ. Civ. Eng. Archit. 2011, 27, 11–15. [Google Scholar]
- Baik, A.; Yaagoubi, R.; Boehm, J. Integration of Jeddah historical BIM and 3D GIS for documentation and restoration of historical monument. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Taipei, Taiwan, 31 August–4 September 2015; Volume XL-5/W7, p. 29. [Google Scholar]
- Barazzetti, L.; Banfi, F. BIM and GIS: When parametric modeling meets geospatial data. In Proceedings of the International Annuls of Photogrammetry, Remote Sensing and Spatial Information Sciences, Kyiv, Uktraine, 4–6 December 2017; Volume IV-5/W1, pp. 1–8. [Google Scholar]
- Chiabrando, F.; Della Coletta, C.; Sammartano, G.; Spanò, A.; Spreafico, A. “TORINO 1911” Project: A contribution of a SLAM-based survey to extensive 3D heritage modeling. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2018, XLII-2, 225–234. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Weight | 1380 g |
| Flight time (max) | 28 min |
| Sensor size | 6.16 × 4.62 mm |
| Resolution | 4000 × 3000 pixels |
| Field of view | 94° |
| Focal length | 35 mm |
| Aperture | f/2.8 |
| TLS | UAV-SfM | |
|---|---|---|
| Device | Leica C10 ScanStation | DJI Phantom 4 |
| Cost | 800,000 RMB | 12,000 RMB |
| Weight | ca. 40 kg | ca. 2 kg |
| Accuracy | 6 mm one station; centimeter-level globally | RMSE = 2.05 cm |
| Completeness | ca. 40% | >95% |
| Field efficiency | 6 h | 3 h |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Zhang, Y. Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability 2018, 10, 2259. https://doi.org/10.3390/su10072259
Sun Z, Zhang Y. Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability. 2018; 10(7):2259. https://doi.org/10.3390/su10072259
Chicago/Turabian StyleSun, Zheng, and Yingying Zhang. 2018. "Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa" Sustainability 10, no. 7: 2259. https://doi.org/10.3390/su10072259
APA StyleSun, Z., & Zhang, Y. (2018). Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability, 10(7), 2259. https://doi.org/10.3390/su10072259