Eco-Speed Guidance for the Mixed Traffic of Electric Vehicles and Internal Combustion Engine Vehicles at an Isolated Signalized Intersection



Abstract
:1. Introduction
2. Problem Statement
3. Eco-Speed Guidance Model
4. Numerical Tests
- P is the power losses;
- r is the resistance of the conductor in a motor;
- K = KaΦd, where Ka is the armature constant and Φd is the magnetic flux;
- R is the radius of the tire;
- k = (ρ/2)CDAf; where ρ is air density, CD is coefficient of drag and Af is frontal area of the vehicle;
- frl is rolling resistance constant;
- g is gravity acceleration;
- θ is the roadway grade.
4.1. Energy Efficiency of Considering Vehicle Queues
- (1)
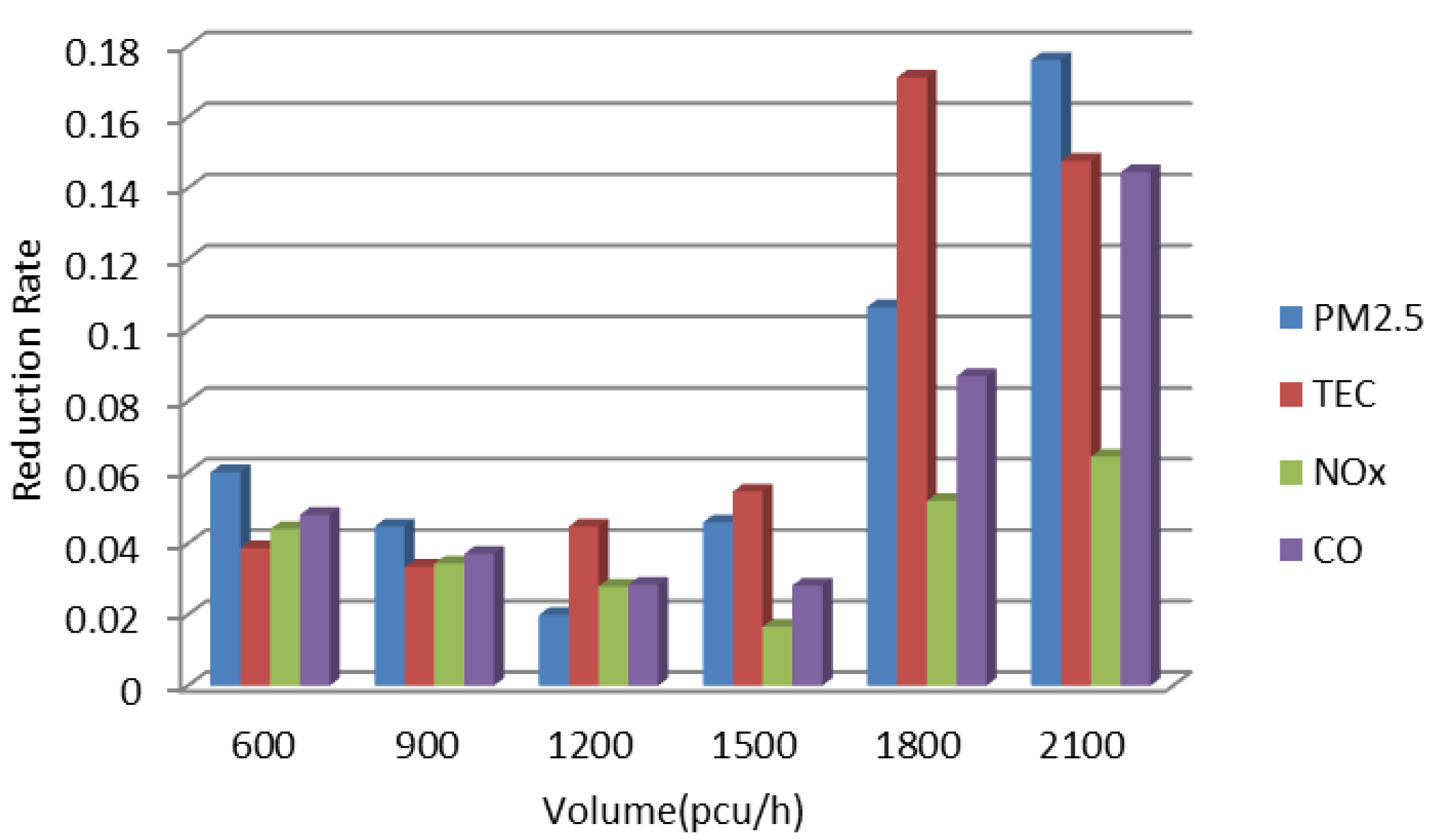
- Considering the effects of vehicle queues can optimize vehicle trajectories to reduce emissions and energy consumption for both EVs and ICEVs.
- (2)
- When the traffic volume was relatively low (e.g., 600 pcu/h and 900 pcu/h), the effect of the queue was relatively low. Because of the low volume, the traffic conditions were free flow, and vehicle operation is basically unaffected by other vehicles. Additionally, the queue lengths are short. When the traffic light turns green, the queue will dissipate quickly, and stopped vehicles will not affect the following vehicles, especially EVs with high acceleration rates that can quickly reach the desired speed.
- (3)
- In the medium-volume (e.g., 1200 pcu/h and 1500 pcu/h) scenarios, optimized effects are more obvious. The traffic flow is in the middle of the steady flow range, and there is a certain effect between vehicles. When the queue lengths are longer, there will be some vehicles that still have to wait while stopped after taking the strategy, and the eco-speed guidance strategy will provide low-speed advice to make vehicles pass through the intersection without stops.
- (4)
- In the high-volume (e.g., 1800 pcu/h and 2100 pcu/h) scenarios, the optimization effect is most obvious. At this point, traffic stability is poor, vehicles will usually be affected by the vehicles in front, and there is often a longer queue length at the signalized intersection. Most vehicles must slow down or stop while waiting to pass through the intersection. The eco-speed guidance strategy has a significant impact on reducing the lengths of stops, so it has an obvious optimization effect on emissions and total energy consumption.
- (5)
- The straight lane has better optimization effects than the left-turn lane because of the influence of the signal, and the turn-left lane has a long red phase duration. After optimization, more vehicles can pass through the intersection by deceleration rather than stopping.
4.2. Sensitivity of Energy Efficiency to Various MPR of EVs
- (1)
- This model has a good impact on vehicle energy consumption and emissions under three different volume scenarios for both gasoline vehicles and EVs. This guidance strategy can lead to fewer stops and optimize the vehicle’s trajectory.
- (2)
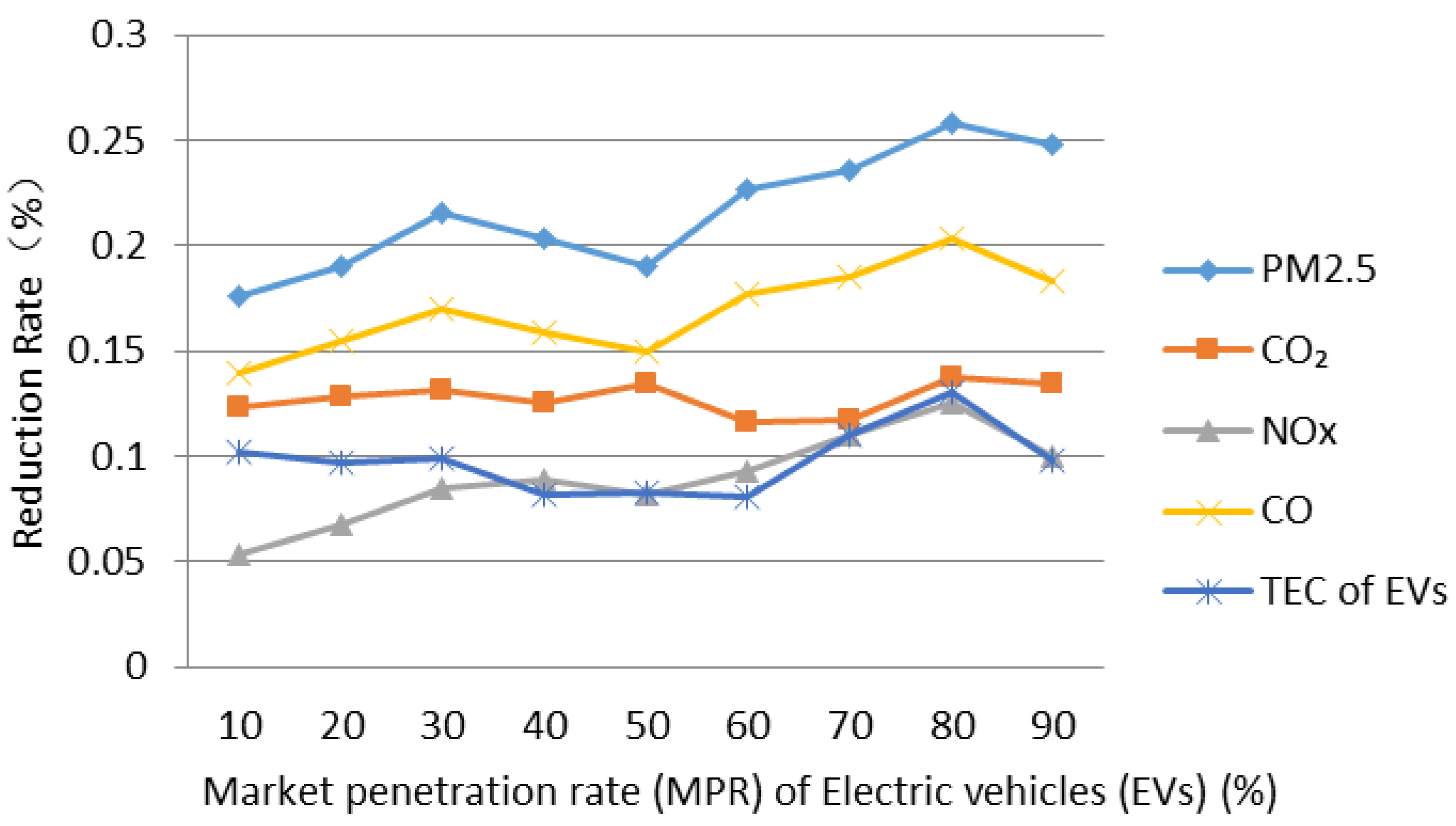
- For the low-volume scenario, this model has a great influence on reducing NOx and CO2 and a positive effect on other emissions and energy consumption of EVs; however, the model has only a small impact on PM2.5 because in low-volume traffic conditions, most cars may pass through an intersection with an acceleration or constant speed pattern. When the share of EVs reaches 50% to 60%, the strategy can achieve a better guidance effect.
- (3)
- For medium volume, more vehicles after guidance will adopt a deceleration pattern, and the reduction effect of optimization on PM2.5 becomes significant. When the share of EVs reaches 80%, a better guidance effect will occur.
- (4)
- For high volume, this model still has a good impact on PM2.5, but for others, especially the energy consumption of EVs, the strategy has a limited influence because EV braking or deceleration will recover some energy. With increasing MPR of EVs, the guidance effects increase.
- (5)
- Compared to the scenario of lower traffic volume, the MPR of EVs have much more influence on the emission reduction rate under the high traffic volume scenario. The reduction rates for all three traffic volume scenarios are not monotone increasing, which prove the complexity in the stability and broad applicability of speed guidance strategy and thus future studies are required.
4.3. Sensitivity of Energy Efficiency to Time Interval
- (1)
- As the guidance time interval increases, the emissions show a trend of decreasing first and then increasing or growing rapidly after gradual growth.
- (2)
- Under a low flow rate, as the guidance time interval increases, the emissions will change gently first, followed by rapid growth. The best guidance intervals are 5~7 s because when the volume is low, the number of vehicles ahead is short, the queues at the intersection are short, and the expected speed under the fuzzy guidance strategy does not change frequently.
- (3)
- At medium or high flow rates, as the guidance time interval increases, the emissions decrease first and then increase. The best guidance time interval is usually no longer than 5 s because when the volume is large, there are more vehicles ahead, the acceleration behaviour of a vehicle is affected by the preceding vehicle, and the long queues at the intersection change at any time, so the expected speed given by the fuzzy guidance strategy will change at any time. Compared with the second-by-second guidance, the expected changes in speed for 3~5 s intervals are smaller.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Qian, J.; Eglese, R. Fuel emissions optimization in vehicle routing problems with time-varying speeds. Eur. J. Oper. Res. 2016, 248, 840–848. [Google Scholar] [CrossRef]
- Kermani, S.; Delprat, S.; Trigui, R.; Guerra, T.M. Predictive energy management of hybrid vehicle. Control Eng. Pract. 2016, 20, 1–6. [Google Scholar]
- Wu, X.K.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Baran, R.; Legey, L. The introduction of electric vehicles in Brazil: Impacts on oil and electricity consumption. Technol. Forecast. Soc. Chang. 2013, 80, 907–917. [Google Scholar] [CrossRef]
- Canals, C.L.; Martinez-Laserna, E.; García, B.A. Sustainability analysis of the electric vehicle use in Europe for CO2 emissions reduction. J. Clean. Product. 2016, 127, 425–437. [Google Scholar] [CrossRef]
- Liu, K.; Yamamoto, T.; Morikawa, T. Impact of Road Gradient on Energy Consumption of Electric Vehicles. Transp. Res. Part D Transp. Environ. 2017, 54, 74–81. [Google Scholar] [CrossRef]
- Liu, K.; Wang, J.B.; Yamamoto, T.; Morikawa, T. Modelling the multilevel structure and mixed effects of the factors influencing the energy consumption of electric vehicles. Appl. Energy 2016, 183, 1351–1360. [Google Scholar] [CrossRef]
- Liu, K.; Wang, J.B.; Yamamoto, T.; Morikawa, T. Exploring the interactive effects of ambient temperature and vehicle auxiliary loads on electric vehicle energy consumption. Appl. Energy 2018, 227, 324–331. [Google Scholar] [CrossRef]
- Ou, H.; Tang, T.Q. An extended two-lane car-following model accounting for inter-vehicle communication. Phys. A Stat. Mech. Appl. 2018, 495, 260–268. [Google Scholar] [CrossRef]
- Tang, T.Q.; Chen, L.; Yang, S.C.; Shang, H.Y. An extended car-following model with consideration of the electric vehicle’s driving range. Phys. A Stat. Mech. Appl. 2015, 430, 148–155. [Google Scholar] [CrossRef]
- Barth, M.; Member, S.; Mandava1, S.; Boriboonsomsin, K.; Xia, H. Dynamic ECO-driving for arterial corridors. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation Systems, Vienna, Austria, 29 June–1 July 2011; 2011; pp. 182–188. [Google Scholar] [CrossRef]
- Tang, T.Q.; Luo, X.F.; Liu, K. Impacts of the driver’s bounded rationality on the traffic running cost under the car-following model. Phys. A Stat. Mech. Appl. 2016, 457, 316–321. [Google Scholar] [CrossRef]
- Wu, W.; Li, P.K.; Zhang, Y. Modelling and Simulation of Vehicle Speed Guidance in Connected Vehicle. Environ. Int. J. Simul. Modell. 2015, 14, 145–157. [Google Scholar] [CrossRef]
- Ge, J.I.; Orosz, G. Dynamics of connected vehicle systems with delayed acceleration feedback. Transp. Res. Part C 2014, 46, 46–64. [Google Scholar] [CrossRef]
- He, X.; Liu, H.X.; Liu, X. Optimal vehicle speed trajectory on a signalized arterial with consideration of queue. Transp. Res. Part C 2015, 61, 106–120. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, P.; Ban, X.J.; Yang, D. Trajectory-based vehicle energy/emissions estimation for signalized arterials using mobile sensing data. Transp. Res. Part D 2015, 34, 27–40. [Google Scholar] [CrossRef]
- Zhao, J.; Li, P. An extended car-following model with consideration of speed guidance at intersections. Phys. A Stat. Mech. Appl. 2016, 461, 1–8. [Google Scholar] [CrossRef]
- Sun, J.; Niu, D.; Chen, S.; Li, K. Development and Investigation of a Dynamic Eco-Driving Speed Guidance Strategy for Signalized Highway Traffic. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Pandian, S.; Gokhale, S.; Ghoshal, A.K. Evaluating effects of traffic and vehicle characteristics on vehicular emissions near traffic intersections. Transp. Res. Part D 2009, 14, 180–196. [Google Scholar] [CrossRef]
- Luo, X.; Dong, L.; Dou, Y.; Li, Y.; Liu, K.; Ren, J.Z.; Liang, H.W.; Mai, X.M. Factor Decomposition Analysis and Causal Mechanism Investigation on Urban Transport CO2 Emission: Comparative Study on Shanghai and Tokyo. Energy Policy 2017, 107, 658–668. [Google Scholar] [CrossRef]
- Li, D.; Li, C.; Miwa, T.; Morikawa, T. An Exploration of Factors Affecting Drivers’ Daily Fuel Consumption Efficiencies Considering Multi-Level Random Effects. Sustainability 2019, 11, 393. [Google Scholar]
- Tang, T.Q.; Yi, Z.Y.; Zhang, J.; Wang, T.; Leng, J.Q. A speed guidance strategy for multiple signalized intersections based on car-following model. Phys. A Stat. Mech. Appl. 2018, 496, 399–409. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, L.; Li, D.; Tu, Q. Stochastic Electric Vehicle Network Considering Environmental Costs. Sustainability 2018, 10, 2888. [Google Scholar] [CrossRef]
- Wang, R.; Chen, Y.; Feng, D. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors. J. Power Sources 2011, 196, 3962–3971. [Google Scholar] [CrossRef]
- Zhu, X.; Meng, F. Transmission Design and Control of EVs. Modeling Dynamics & Control of Electrified Vehicles. In Modeling Dynamics & Control of Electrified Vehicles; Zhang, H., Cao, D., Du, H., Eds.; Woodhead Publishing: New Delhi, India, 2018; Chapter 7; pp. 245–274. [Google Scholar]
- Wang, Y.; Fujimoto, H. Dynamics Control for EVs. In Modeling Dynamics & Control of Electrified Vehicles; Zhang, H., Cao, D., Du, H., Eds.; Woodhead Publishing: New Delhi, India, 2018; Chapter 9; pp. 309–337. [Google Scholar]
- Wu, W.; Ma, W.; Long, K.; Zhou, H.; Zhang, Y. Designing Sustainable Public Transportation: Integrated Optimization of Bus Speed and Holding Time in a Connected Vehicle Environment. Sustainability 2016, 8, 1170. [Google Scholar] [CrossRef]
- Lv, C.; Wang, H.; Cao, D. Brake-Blending Control of EVs, In Modeling Dynamics & Control of Electrified Vehicles; Zhang, H., Cao, D., Du, H., Eds.; Woodhead Publishing: New Delhi, India, 2018; Chapter 8; pp. 275–308. [Google Scholar]
- Knowles, M.; Scott, H.; Baglee, D. The effect of driving style on electric vehicle performance, economy and perception. Int. J. Electr. Hybrid Veh. 2012, 4, 228–247. [Google Scholar] [CrossRef]
- Liu, K.; Jia, J.; Zuo, Z.; Ando, R. Heterogeneity in the effectiveness of cooperative crossing collision prevention systems. Transp. Res. Part C 2018, 87, 1–10. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D 2015, 41, 177–187. [Google Scholar] [CrossRef]
- Wang, J.B.; Liu, K.; Yamamoto, T. Improving Electricity Consumption Estimation for Electric Vehicles Based on Sparse GPS Observations. Energies 2017, 10, 129. [Google Scholar] [CrossRef]
- Ala, M.V.; Yang, H.; Rakha, H. Modeling Evaluation of Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersection. Transp. Res. Rec. 2016, 2559, 108–119. [Google Scholar] [CrossRef]
- Castro, A.G.; Monzon, A.C.; Valdes, M.R. Modeling different penetration rates of eco-driving in urban areas: Impacts on traffic flow and emissions. Int. J. Sustain. Transp. 2017, 11, 282–294. [Google Scholar] [CrossRef]
- Kamalanathsharma, R.K.; Rakha, H. Agent-Based Simulation of Eco-Speed Controlled Vehicles at Signalized Intersections. Transp. Res. Rec. 2014, 2427, 1–12. [Google Scholar] [CrossRef]
- Yao, H.D.; Cui, J.X.; Li, X.P.; Wang, Y.; An, S. A trajectory smoothing method at signalized intersection based on individualized variable speed limits with location optimization. Transp. Res. Part D 2018, 62, 456–473. [Google Scholar] [CrossRef]
- Sun, Y.; Ge, H.X.; Cheng, R.J. An extended car-following model under V2V communication environment and its delayed-feedback control. Phys. A Stat. Mech. Appl. 2018, 508, 349–358. [Google Scholar] [CrossRef]
- Mensing, F.; Bideaux, E.; Trigui, R.; Ribet, J.; Jeanneret, B. Eco-driving: An economic or ecologic driving style? Transp. Res. Part C 2014, 38, 110–121. [Google Scholar] [CrossRef]
- Tang, T.Q.; Zhang, J.; Liu, K. A speed guidance model accounting for the driver’s bounded rationality at a signalized intersection. Phys. A Stat. Mech. Appl. 2017, 473, 45–52. [Google Scholar] [CrossRef]
- Galvin, R. Energy consumption effects of speed and acceleration in electric vehicles: Laboratory case studies and implications for drivers and policymakers. Transp. Res. Part D 2017, 53, 234–248. [Google Scholar] [CrossRef]
- Wu, X.K.; He, X.Z.; Yu, G.Z.; Harmandayan, Y.A.; Wang, P. Energy-Optimal Speed Control for Electric Vehicles on Signalized Arterials. IEEE Trans. Intel. Transp. Syst. 2015, 16, 2786–2796. [Google Scholar]
- Qi, X.W.; Barth, M.J.; Wu, G.Y.; Boriboonsomsin, K.; Wang, P. Energy Impact of Connected Eco-driving on Electric Vehicles. Road Veh. Autom. 2018, 4, 97–111. [Google Scholar]
- He, X.Z.; Wu, X.K. Eco-driving advisory strategies for a platoon of mixed gasoline and electric vehicles in a connected vehicle system. Transp. Res. Part D 2018, 63, 907–922. [Google Scholar] [CrossRef]
- Yu, S.W.; Fu, R.; Guo, Y.S.; Xin, Q.; Shi, Z.K. Consensus and optimal speed advisory model for mixed traffic at an isolated signalized intersection. Phys. A Stat. Mech. Appl. 2019, 531, 121789. [Google Scholar] [CrossRef]
- Xin, Q.; Fu, R.; Yuan, W.; Liu, Q.L.; Yu, S.W. Predictive intelligent driver model for eco-driving using upcoming traffic signal information. Phys. A Stat. Mech. Appl. 2018, 508, 806–823. [Google Scholar] [CrossRef]
- Wu, Y.Z.; Song, G.H.; Yu, L. Sensitive analysis of emission rates in MOVES for developing site-specific emission database. Transp. Res. Part D 2014, 32, 193–206. [Google Scholar] [CrossRef]
- Koupal, J.; Cumberworth, M.; Michaels, H.; Beardsley, M.; Brzezinski, D. Design and Implementation of MOVES: EPA’s New Generation Mobile Source Emission Model. Ann Arbor 2003, 1001, 105. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 s | 2 s | 3 s | 4 s | 5 s | 6 s | 7 s | 8 s | ||
|---|---|---|---|---|---|---|---|---|---|
| Straight lane | PM2.5 (g) | 0.0932 | 0.0932 | 0.0930 | 0.0927 | 0.0928 | 0.0932 | 0.0935 | 0.0940 |
| TEC (kJ) | 87,573.43 | 87,513.8 | 87,524.49 | 87,405.64 | 87,047.14 | 87,181.47 | 87,393.67 | 89,662.52 | |
| CO2 (g) | 5742.03 | 5836.76 | 6002.62 | 6138.63 | 6183.91 | 6310.22 | 6359.21 | 6515.61 | |
| NOx (g) | 4.5769 | 4.52 | 4.5008 | 4.5148 | 4.5103 | 4.5016 | 4.5021 | 4.6069 | |
| CO (g) | 51.5292 | 51.645 | 51.8331 | 52.0968 | 52.0561 | 52.3456 | 52.3949 | 52.8811 | |
| Left-turn lane | PM2.5 (g) | 0.0213 | 0.0212 | 0.0212 | 0.0209 | 0.0221 | 0.0224 | 0.0227 | 0.0233 |
| TEC (kJ) | 19,854.28 | 19,886.63 | 19,820.06 | 19,898.41 | 19,916.03 | 19,909.5 | 20,183.97 | 20,276.78 | |
| CO2 (g) | 1316.90 | 1357.84 | 1402.85 | 1413.12 | 1439.92 | 1470.14 | 1508.95 | 1536.70 | |
| NOx (g) | 0.9801 | 1.0207 | 1.0433 | 1.0612 | 1.0953 | 1.1002 | 1.1260 | 1.1648 | |
| CO (g) | 11.8325 | 11.6880 | 11.9850 | 11.9704 | 12.0970 | 11.8853 | 12.7650 | 13.0979 |
| 1 s | 2 s | 3 s | 4 s | 5 s | 6 s | 7 s | 8 s | ||
|---|---|---|---|---|---|---|---|---|---|
| Straight lane | PM2.5 (g) | 0.2550 | 0.2724 | 0.2927 | 0.2960 | 0.2992 | 0.2839 | 0.2745 | 0.2618 |
| TEC (kJ) | 189,910.2 | 187,453 | 189,235 | 190,280.7 | 195,696 | 195,524.5 | 196,590.2 | 196,087.2 | |
| CO2 (g) | 13,145.13 | 13,259.66 | 13,815.74 | 13,962.31 | 14,998.29 | 14,257.24 | 14,128.3 | 14,413.53 | |
| NOx (g) | 10.4206 | 11.3725 | 11.806 | 11.8131 | 13.0749 | 12.3239 | 12.3612 | 12.3819 | |
| CO (g) | 120.0596 | 131.4939 | 134.7215 | 136.4452 | 151.4867 | 147.2736 | 147.5452 | 147.9185 | |
| Left-turn lane | PM2.5 (g) | 0.0537 | 0.0550 | 0.0542 | 0.0551 | 0.0556 | 0.0554 | 0.0554 | 0.0553 |
| TEC (kJ) | 47,621.92 | 47,622.4 | 47,434.47 | 47,869.03 | 48,595.76 | 48,953.9 | 49,924.72 | 50,879.12 | |
| CO2 (g) | 3321.81 | 3522.14 | 3448.37 | 3476.12 | 3521.16 | 3661.88 | 3659.79 | 3656.51 | |
| NOx (g) | 3.2821 | 3.2879 | 3.2493 | 3.2125 | 3.2296 | 3.2928 | 3.2878 | 3.2825 | |
| CO (g) | 29.6279 | 29.7277 | 29.5447 | 29.2070 | 29.4857 | 30.0055 | 30.3652 | 30.3283 |
| 1 s | 2 s | 3 s | 4 s | 5 s | 6 s | 7 s | 8 s | ||
|---|---|---|---|---|---|---|---|---|---|
| Straight lane | PM2.5 (g) | 0.4164 | 0.4321 | 0.3942 | 0.4001 | 0.3908 | 0.3825 | 0.3740 | 0.3686 |
| TEC (kJ) | 461,336.3 | 470,190.1 | 459,433 | 454,654.8 | 466,362.6 | 479,816.8 | 519,229.8 | 514,366 | |
| CO2 (g) | 33,154.7 | 35,228.33 | 30,143.25 | 30,518.56 | 29,491.4 | 29,368.46 | 27,724.68 | 27,623.10 | |
| NOx (g) | 21.3197 | 21.3017 | 21.3673 | 21.4214 | 21.4557 | 21.5044 | 21.6289 | 21.6352 | |
| CO (g) | 241.7943 | 240.5921 | 235.9937 | 238.6056 | 239.0073 | 239.1202 | 240.59 | 241.3298 | |
| Left-turn lane | PM2.5 (g) | 0.1197 | 0.1201 | 0.1143 | 0.1196 | 0.1235 | 0.1092 | 0.1104 | 0.1138 |
| TEC (kJ) | 161,633.5 | 154,825 | 145,921.2 | 151,356.6 | 163,552.4 | 161,866.7 | 164,260.3 | 178,955.4 | |
| CO2 (g) | 11,616.05 | 11,126.74 | 10,268.17 | 10,877.48 | 11,753.98 | 9879.8 | 10,066.91 | 10,704.94 | |
| NOx (g) | 5.8289 | 5.6136 | 5.4122 | 5.6001 | 5.7587 | 5.3503 | 5.3991 | 5.5731 | |
| CO (g) | 77.5974 | 74.4519 | 69.6518 | 73.2415 | 77.9502 | 77.5996 | 78.6660 | 77.3319 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Liu, D.; Li, C.; Yamamoto, T. Eco-Speed Guidance for the Mixed Traffic of Electric Vehicles and Internal Combustion Engine Vehicles at an Isolated Signalized Intersection. Sustainability 2019, 11, 5636. https://doi.org/10.3390/su11205636
Liu K, Liu D, Li C, Yamamoto T. Eco-Speed Guidance for the Mixed Traffic of Electric Vehicles and Internal Combustion Engine Vehicles at an Isolated Signalized Intersection. Sustainability. 2019; 11(20):5636. https://doi.org/10.3390/su11205636
Chicago/Turabian StyleLiu, Kai, Dong Liu, Cheng Li, and Toshiyuki Yamamoto. 2019. "Eco-Speed Guidance for the Mixed Traffic of Electric Vehicles and Internal Combustion Engine Vehicles at an Isolated Signalized Intersection" Sustainability 11, no. 20: 5636. https://doi.org/10.3390/su11205636
APA StyleLiu, K., Liu, D., Li, C., & Yamamoto, T. (2019). Eco-Speed Guidance for the Mixed Traffic of Electric Vehicles and Internal Combustion Engine Vehicles at an Isolated Signalized Intersection. Sustainability, 11(20), 5636. https://doi.org/10.3390/su11205636