Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler

 ,
,  , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Low-Cost Sensor
2.1.1. The Laser Particulate Matter Sensor: HM-3301
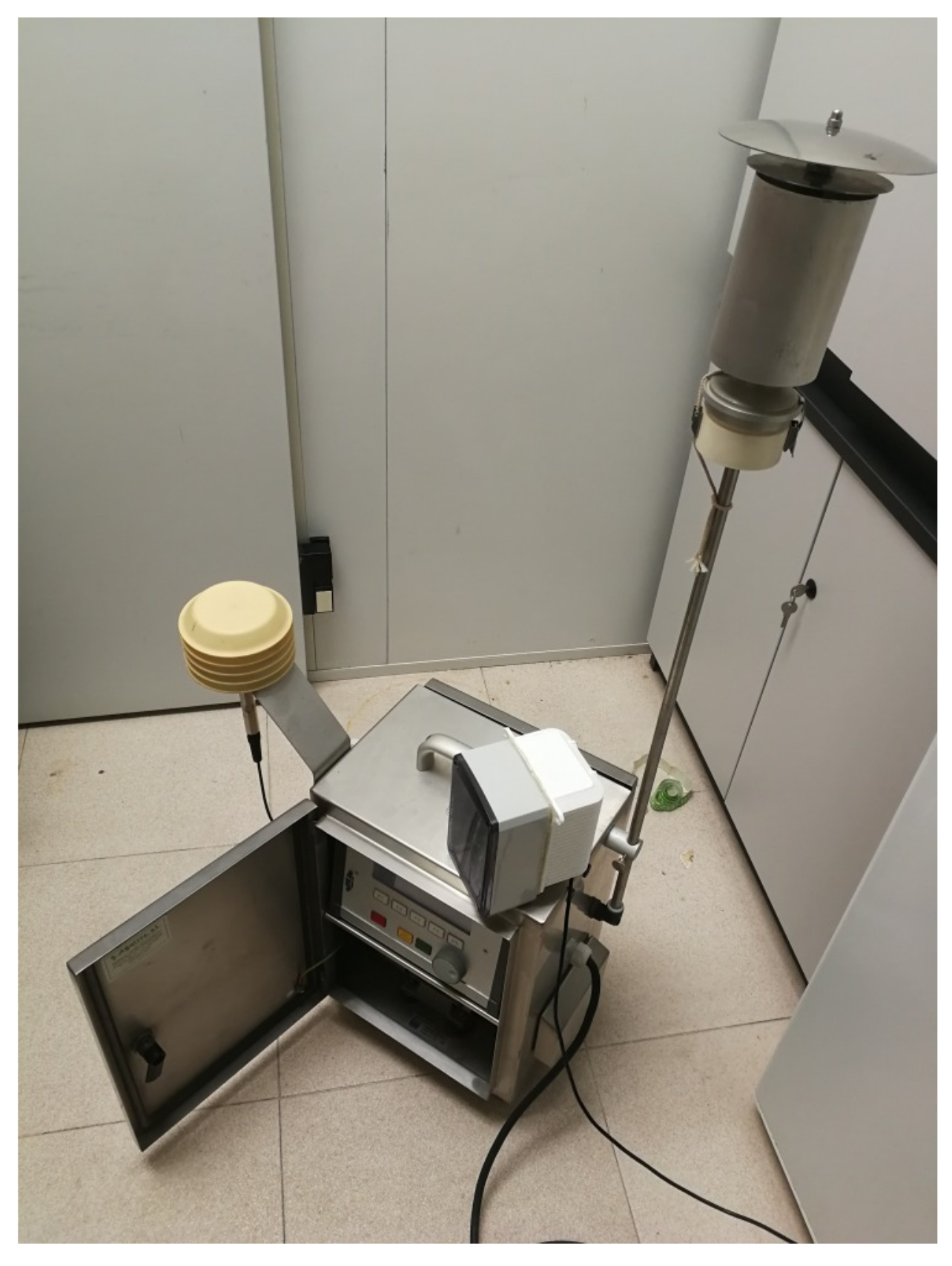
2.2. Reference Sampler: LVS3
2.3. Sampling Conditions
2.4. Statistical Models Used for Validation
3. Results
3.1. Description Data
3.2. Analysis and Modeling
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Clancy, L.; Goodman, P.; Sinclair, H.; Dockery, D.W. Effect of air-pollution control on death rates in Dublin, Ireland: an intervention study. Lancet 2002, 360, 1210–1214. [Google Scholar] [CrossRef]
- Vedal, S.; Brauer, M.; White, R.; Petkau, J. Air pollution and daily mortality in a city with low levels of pollution. Environ. Health Perspect. 2003, 111, 45–52. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kampa, M.; Castanas, E. Human health effects of air pollution. Environ. Pollut. 2008, 151, 362–367. [Google Scholar] [CrossRef]
- Torres, P.; Ferreira, J.; Monteiro, A.; Costa, S.; Pereira, M.C.; Madureira, J.; Mendes, A.; Teixeira, J.P. Air pollution: A public health approach for Portugal. Sci. Total. Environ. 2018, 643, 1041–1053. [Google Scholar] [CrossRef] [PubMed]
- Bayat, R.; Ashrafi, K.; Motlagh, M.S.; Hassanvand, M.S.; Daroudi, R.; Fink, G.; Künzli, N. Health impact and related cost of ambient air pollution in Tehran. Environ. Res. 2019, 176, 108547. [Google Scholar] [CrossRef]
- Kim, J.S.; Chen, Z.; Alderete, T.L.; Toledo-Corral, C.; Lurmann, F.; Berhane, K.; Gilliland, F.D. Associations of air pollution, obesity and cardiometabolic health in young adults: The Meta-AIR study. Environ. Int. 2019, 133, 105180. [Google Scholar] [CrossRef]
- Vicente, A.B.; Juan, P.; Meseguer, S.; Serra, L.; Trilles, S. Air Quality Trend of PM10. Statistical Models for Assessing the Air Quality Impact of Environmental Policies. Sustainability 2019, 11, 5857. [Google Scholar] [CrossRef] [Green Version]
- Unal, Y.; Toros, H.; Deniz, A.; Incecik, S. Influence of meteorological factors and emission sources on spatial and temporal variations of PM10 concentrations in Istanbul metropolitan area. Atmos. Environ. 2011, 45, 5504–5513. [Google Scholar] [CrossRef]
- European Parliament and Council of the European Union. Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on ambient air quality and cleaner air for Europe; European Unions: Brussels, Belgium, 2008. [Google Scholar]
- European Parliament and Council of the European Union. Commission Directive (EU) 2015/1480 of 28 August 2015 Amending Several Annexes to Directives 2004/107/EC and 2008/50/EC of the European Parliament and of the Council Laying Down the Rules Concerning Reference Methods, Data Validation and Location of Sampling Points for the Assessment of Ambient air Quality; European Unions: Brussels, Belgium, 2015. [Google Scholar]
- Degbelo, A.; Granell, C.; Trilles, S.; Bhattacharya, D.; Casteleyn, S.; Kray, C. Opening up smart cities: citizen-centric challenges and opportunities from GIScience. ISPRS Int. J. -Geo-Inf. 2016, 5, 16. [Google Scholar] [CrossRef] [Green Version]
- Castell, N.; Dauge, F.R.; Schneider, P.; Vogt, M.; Lerner, U.; Fishbain, B.; Broday, D.; Bartonova, A. Can commercial low-cost sensor platforms contribute to air quality monitoring and exposure estimates? Environ. Int. 2017, 99, 293–302. [Google Scholar] [CrossRef]
- Hahn, D.W. Light Scattering Theory; Department of Mechanical and Aerospace Engineering, University of Florida: Gainesville, FL, USA, 2009. [Google Scholar]
- Götschi, T.; Oglesby, L.; Mathys, P.; Monn, C.; Manalis, N.; Koistinen, K.; Jantunen, M.; Hänninen, O.; Polanska, L.; Künzli, N. Comparison of black smoke and PM2.5 levels in indoor and outdoor environments of four European cities. Environ. Sci. Technol. 2002, 36, 1191–1197. [Google Scholar] [CrossRef] [PubMed]
- Zikova, N.; Masiol, M.; Chalupa, D.; Rich, D.; Ferro, A.; Hopke, P. Estimating hourly concentrations of PM2.5 across a metropolitan area using low-cost particle monitors. Sensors 2017, 17, 1922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Le, K.; Tingey, K.; Becnel, T.; Giallardon, P.; Butterfield, T. Building Air Quality Sensors & Inspiring Citizen Scientists. Chem. Eng. Educ. 2018, 52, 193–201. [Google Scholar]
- Sharp GP2Y1010AU0F. Available online: https://www.sparkfun.com/datasheets/Sensors/gp2y1010au_e.pdf (accessed on 5 November 2019).
- PM3007. Available online: http://www.gassensor.com.cn/product_detail_en/Particle_Sensor/PM3007 (accessed on 5 November 2019).
- PMS 1003. Available online: https://aqicn.org/sensor/pms1003/es/ (accessed on 5 November 2019).
- Particle Sensor Unit—PPD42NJ. Available online: https://www.shinyei.co.jp/stc/eng/products/optical/ppd42nj.html (accessed on 5 November 2019).
- Nova SDS011. Available online: http://www.inovafitness.com/en/a/chanpinzhongxin/95.html (accessed on 5 November 2019).
- HM3301. Available online: https://www.seeedstudio.com/Grove-Laser-PM2-5-Sensor-HM3301.html (accessed on 5 November 2019).
- Trilles, S.; Calia, A.; Belmonte, Ó.; Torres-Sospedra, J.; Montoliu, R.; Huerta, J. Deployment of an open sensorized platform in a smart city context. Future Gener. Comput. Syst. 2017, 76, 221–233. [Google Scholar] [CrossRef]
- Mukherjee, A.; Stanton, L.; Graham, A.; Roberts, P. Assessing the utility of low-cost particulate matter sensors over a 12-week period in the Cuyama valley of California. Sensors 2017, 17, 1805. [Google Scholar] [CrossRef] [Green Version]
- Genikomsakis, K.N.; Galatoulas, N.F.; Dallas, P.I.; Candanedo Ibarra, L.; Margaritis, D.; Ioakimidis, C.S. Development and On-Field testing of Low-Cost portable system for monitoring PM2.5 concentrations. Sensors 2018, 18, 1056. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.Y.; Schneider, P.; Haugen, R.; Vogt, M. Performance assessment of a low-cost PM2.5 sensor for a near four-month period in Oslo, Norway. Atmosphere 2019, 10, 41. [Google Scholar] [CrossRef] [Green Version]
- Trilles, S.; Luján, A.; Belmonte, Ó.; Montoliu, R.; Torres-Sospedra, J.; Huerta, J. SEnviro: A sensorized platform proposal using open hardware and open standards. Sensors 2015, 15, 5555–5582. [Google Scholar] [CrossRef] [Green Version]
- Universitat Jaume I University. Available online: http://www.uji.e (accessed on 26 Novermber 2019).
- Trilles, S.; González-Pérez, A.; Huerta, J. A Comprehensive IoT Node Proposal Using Open Hardware. A Smart Farming Use Case to Monitor Vineyards. Electronics 2018, 7, 419. [Google Scholar] [CrossRef] [Green Version]
- Trilles Oliver, S.; González-Pérez, A.; Huerta Guijarro, J. Adapting Models to Warn Fungal Diseases in Vineyards Using In-Field Internet of Things (IoT) Nodes. Sustainability 2019, 11, 416. [Google Scholar] [CrossRef] [Green Version]
- Oliver, S.T.; González-Pérez, A.; Guijarro, J.H. An IoT proposal for monitoring vineyards called SEnviro for agriculture. In Proceedings of the 8th International Conference on the Internet of Things, Santa Barbara, CA, USA, 15–18 October 2018; p. 20. [Google Scholar]
- Particle Boron Microcontroller. Available online: https://docs.particle.io/datasheets/cellular/boron-datasheet/ (accessed on 5 November 2019).
- Vicente, A.; Juan, P.; Meseguer, S.; Díaz-Avalos, C.; Serra, L. Variability of PM10 in industrialized-urban areas. New coefficients to establish significant differences between sampling points. Environ. Pollut. 2018, 234, 969–978. [Google Scholar] [CrossRef] [PubMed]
- Archontoulis, S.V.; Miguez, F.E. Nonlinear regression models and applications in agricultural research. Agron. J. 2015, 107, 786–798. [Google Scholar] [CrossRef] [Green Version]
- Patón, D.; Andréu, E.; Morales, T.; Degollada, E.; Amigó, N.; Martín, C.; Molina, C.; Pajuelo, P. Análisis comparado de modelos GAM, GLM y LOESS para la determinación de mapas de distribución en cetáceos. In Proceedings of the X Congreso de la SEC (Sociedad Española de Cetáceos), Valencia, Spain, 29–30 September 2017. [Google Scholar]
- Trilles, S. Particulate Matter Observations Using HM-3301 Low-cost Sensor; Zenodo: Geneva, Switzerland, 13 November 2019. [Google Scholar] [CrossRef]
- Polidori, A.; Papapostolou, V.; Zhang, H. Laboratory Evaluation of Low-Cost Air Quality Sensors; South Coast Air Quality Management District: Diamondbar, CA, USA, 2016.
- Papapostolou, V.; Zhang, H.; Feenstra, B.J.; Polidori, A. Development of an environmental chamber for evaluating the performance of low-cost air quality sensors under controlled conditions. Atmos. Environ. 2017, 171, 82–90. [Google Scholar] [CrossRef]
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. A machine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmos. Meas. Tech. 2018, 11, 291–313. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Technical Parameters |
|---|---|
| Range | g/m (effective range), 1000 g/m (maximum range) |
| Particle size | m, m, m, m, 5 m, 10 m |
| Output value | PM1, PM2.5, PM10, TSP concentration ( g/m, number of particles () |
| Resolution | Concentration: 1 g/m, counting concentration: 1 s/0.1 L |
| Consistency | g/m:±10 g/m @ 25, 50% RH |
| g/m: g/m @ 25, 50% RH | |
| Stability time | 30 s after power on |
| Sensitivity | Refresh data once every second |
| Supply voltage | |
| Operating current | Average operating current mA, peak current mA |
| Communication Interface | UART, I2C optional |
| Conditions of Use | C, % RH (non-condensing) |
| Life | Not less than 2 years of indoor environment use |
| Standards followed | ISO 14644-1 and FS209E |
| Dimension | mm |
| Price | 27.15 euros |
| Feature | Technical Parameters |
|---|---|
| Flow rate | 1.0 … 3.5 m (Nm/h) |
| Particle size | m, 10 m |
| Power consumption | 240 VA |
| Filter diameter | 47 mm |
| Dimensions | width 300 mm; height 450 mm; depth 250 mm |
| Weight | 17 kg |
| Sensitivity | Refresh data once every 1 s |
| Noise level | <31 dB(A) |
| Operating temperature range | C |
| Operating humidity range | |
| Price | Approximately 15,000 euros |
| (a) PM2.5 Value | (b) PM10 Value | ||||
|---|---|---|---|---|---|
| Date | Environment | PM2.5 (g/m) | Date | Environment | PM10 (g/m) |
| 25/09/2019 | Indoor | 4.8830 | 16/10/2019 | Outdoor | 17.0293 |
| 16/10/2019 | Outdoor | 13.8635 | 16/10/2019 | Outdoor | 28.0802 |
| 17/10/2019 | Outdoor | 16.8210 | 17/10/2019 | Outdoor | 25.9058 |
| 18/10/2019 | Outdoor | 16.8149 | 18/10/2019 | Outdoor | 31.8846 |
| 21/10/2019 | Outdoor | 9.2263 | 19/10/2019 | Outdoor | 29.7107 |
| 25/09/2019 | Indoor | 4.8830 | 20/10/2019 | Outdoor | 9.7831 |
| 31/10/2019 | Indoor | 9.5827 | 21/10/2019 | Outdoor | 19.7475 |
| 05/11/2019 | Indoor | 2.8941 | 31/10/2019 | Indoor | 2.3509 |
| 07/11/2019 | Indoor | 0.5425 | 07/11/2019 | Indoor | 0.7230 |
| 09/11/2019 | Indoor | 1.4469 | 09/11/2019 | Indoor | 4.3386 |
| 11/11/2019 | Indoor | 2.7106 | 11/11/2019 | Indoor | 2.1701 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trilles, S.; Vicente, A.B.; Juan, P.; Ramos, F.; Meseguer, S.; Serra, L. Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler. Sustainability 2019, 11, 7220. https://doi.org/10.3390/su11247220
Trilles S, Vicente AB, Juan P, Ramos F, Meseguer S, Serra L. Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler. Sustainability. 2019; 11(24):7220. https://doi.org/10.3390/su11247220
Chicago/Turabian StyleTrilles, Sergio, Ana Belen Vicente, Pablo Juan, Francisco Ramos, Sergi Meseguer, and Laura Serra. 2019. "Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler" Sustainability 11, no. 24: 7220. https://doi.org/10.3390/su11247220
APA StyleTrilles, S., Vicente, A. B., Juan, P., Ramos, F., Meseguer, S., & Serra, L. (2019). Reliability Validation of a Low-Cost Particulate Matter IoT Sensor in Indoor and Outdoor Environments Using a Reference Sampler. Sustainability, 11(24), 7220. https://doi.org/10.3390/su11247220