Time-Frequency Energy Distribution of Ground Motion and Its Effect on the Dynamic Response of Nonlinear Structures



Abstract
:1. Introduction
1.1. Background
1.2. Scope
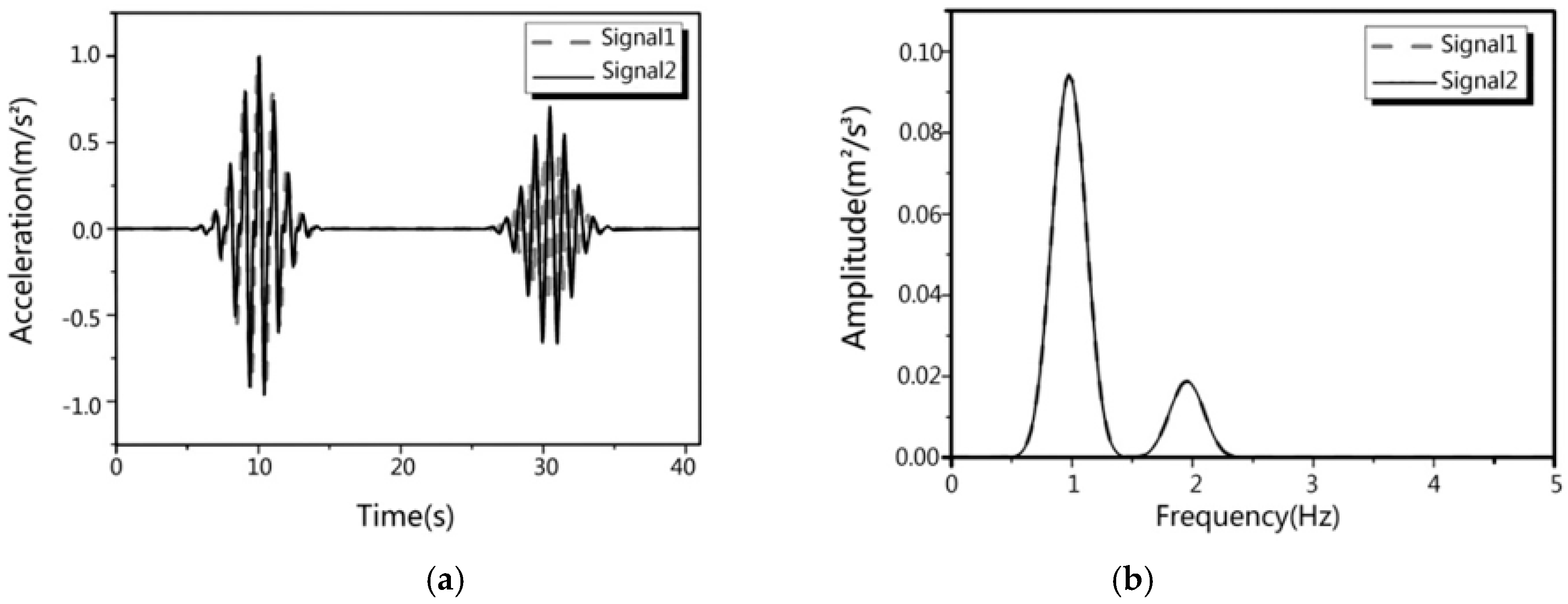
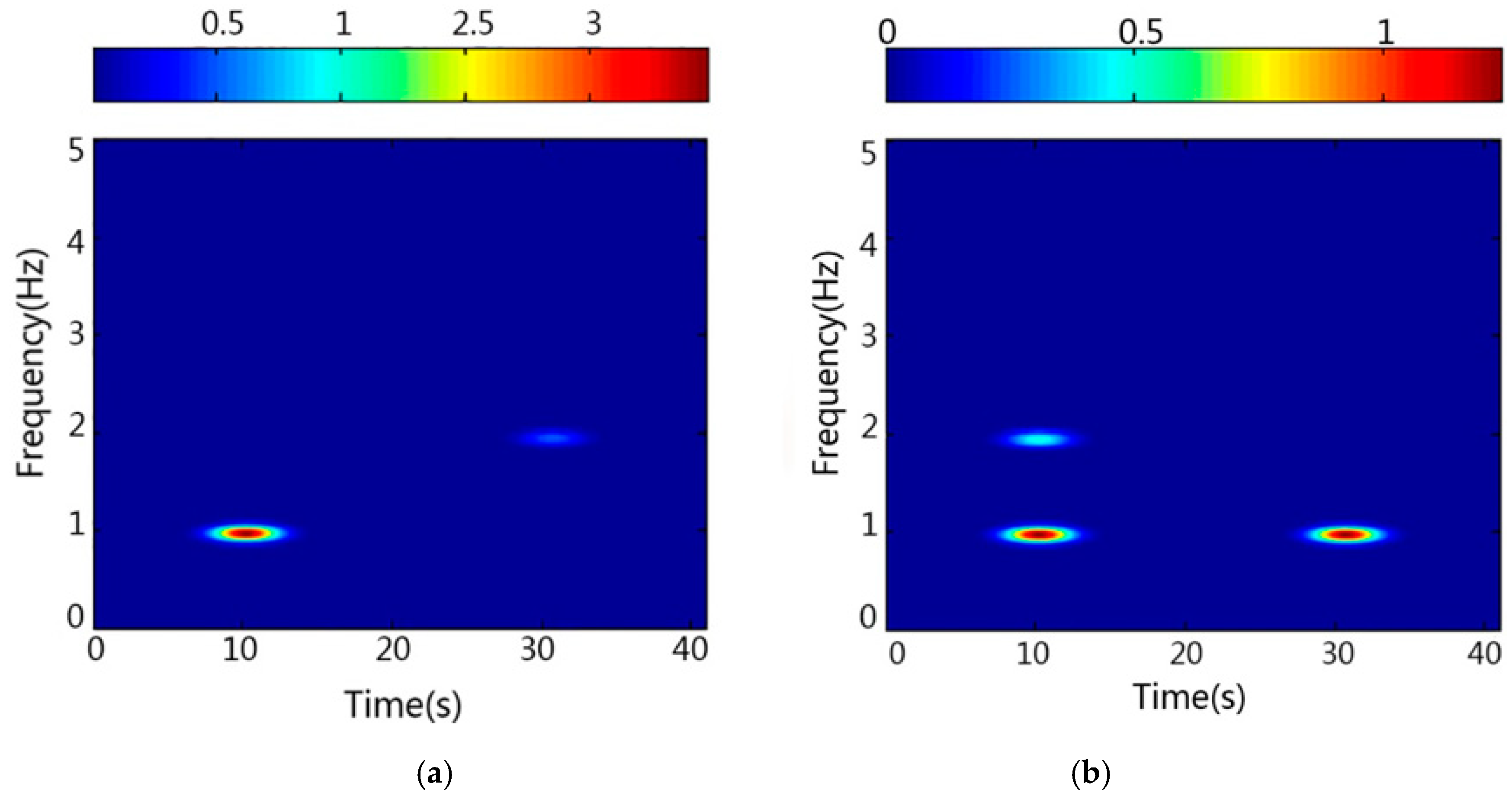
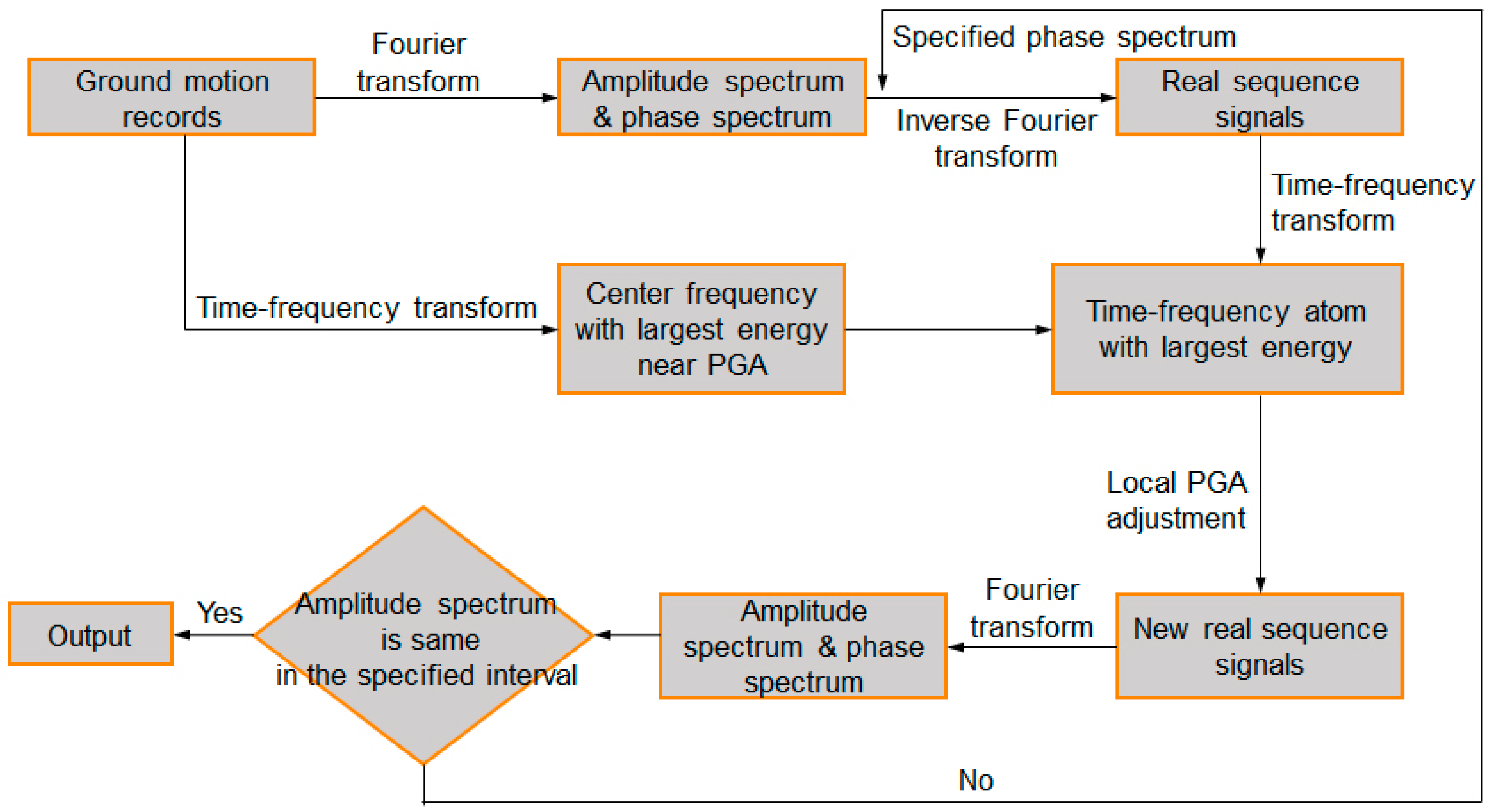
2. Matching Pursuit Decomposition Algorithm
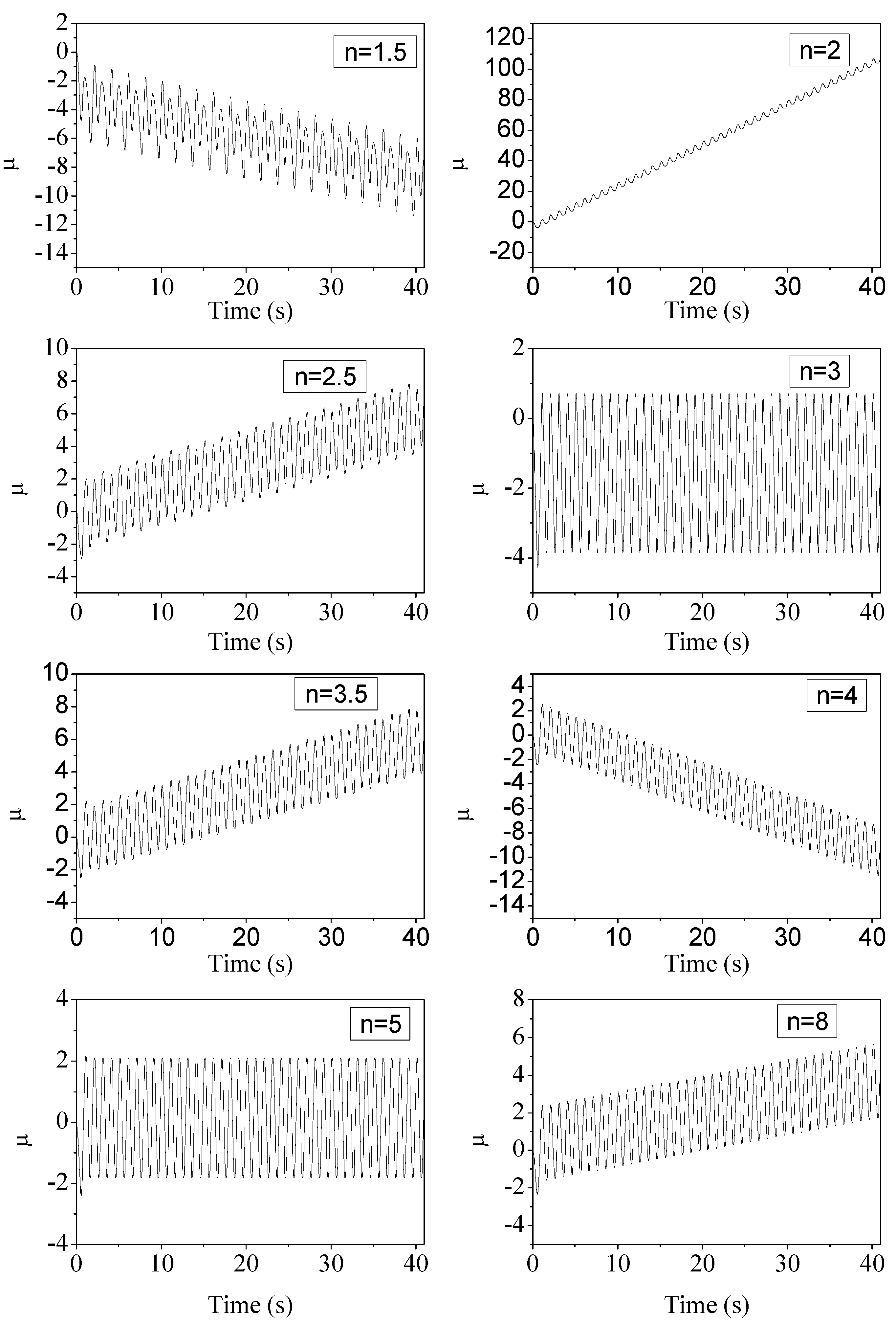
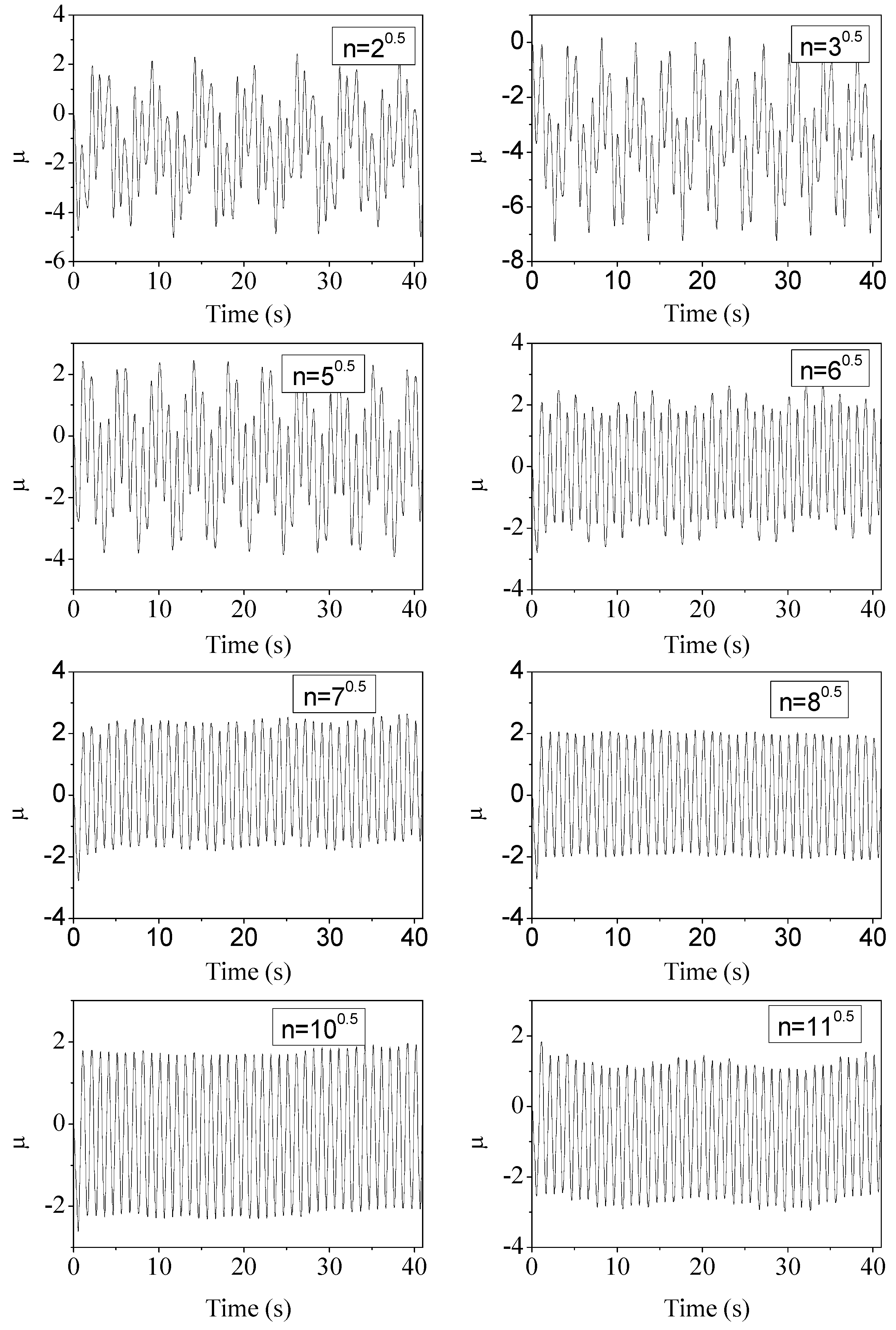
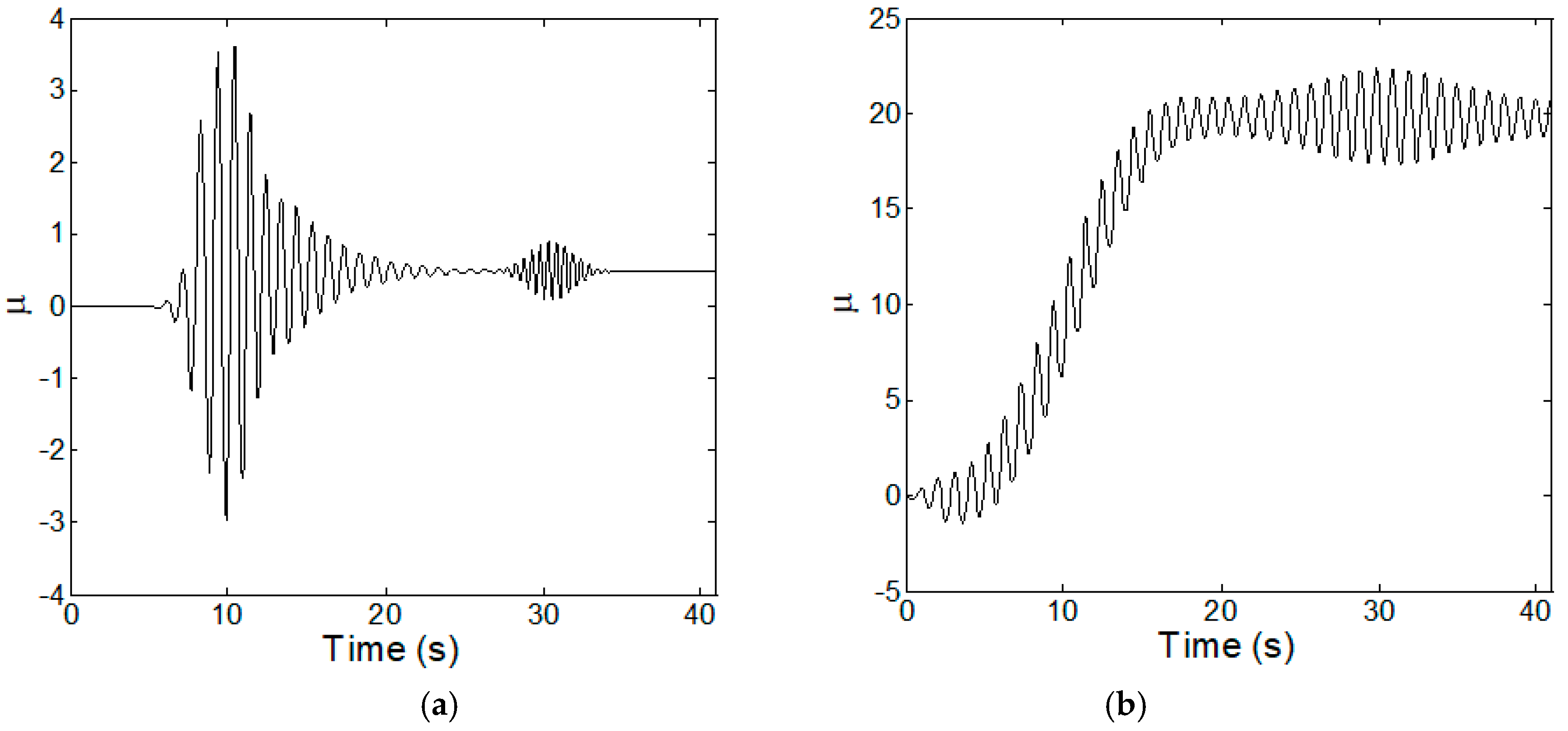
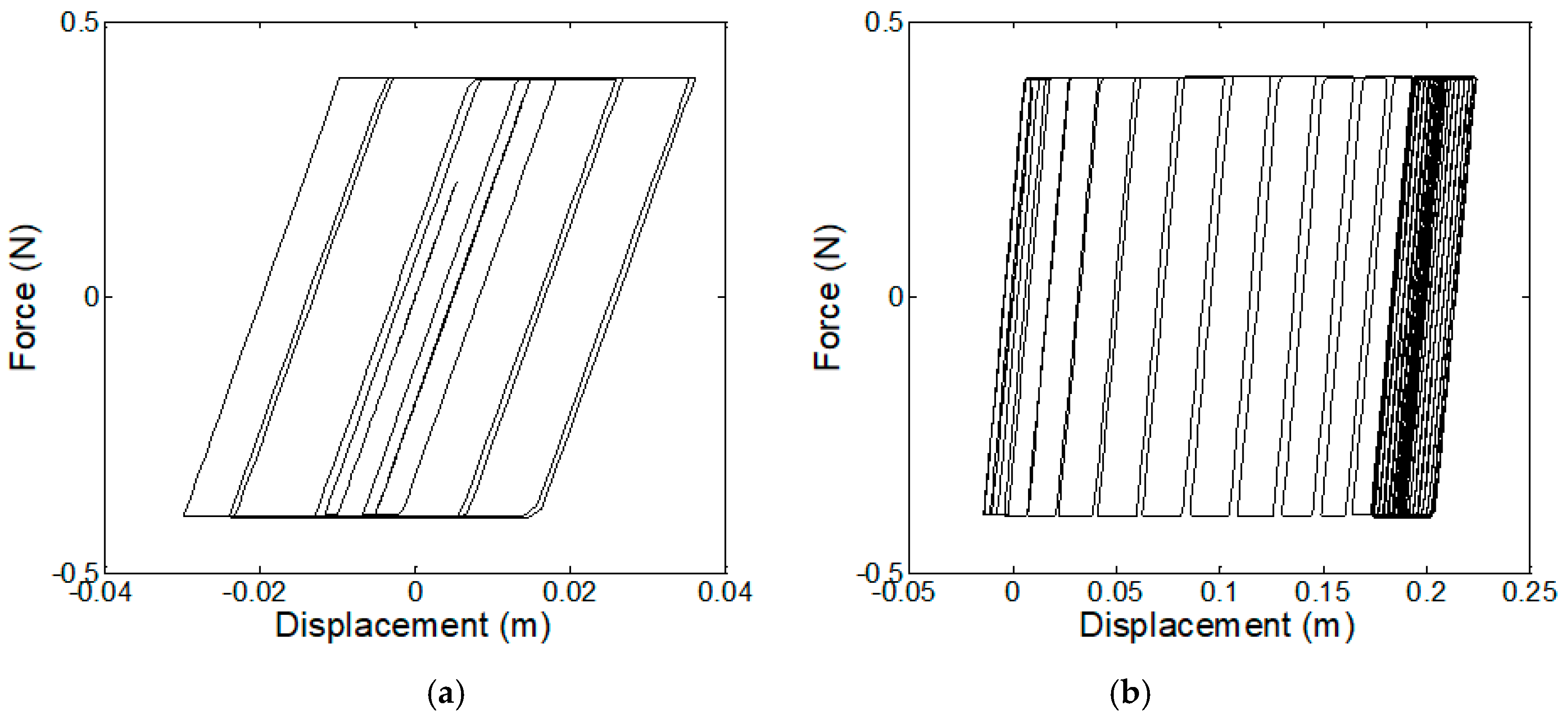
3. Dynamic Ratcheting Phenomena
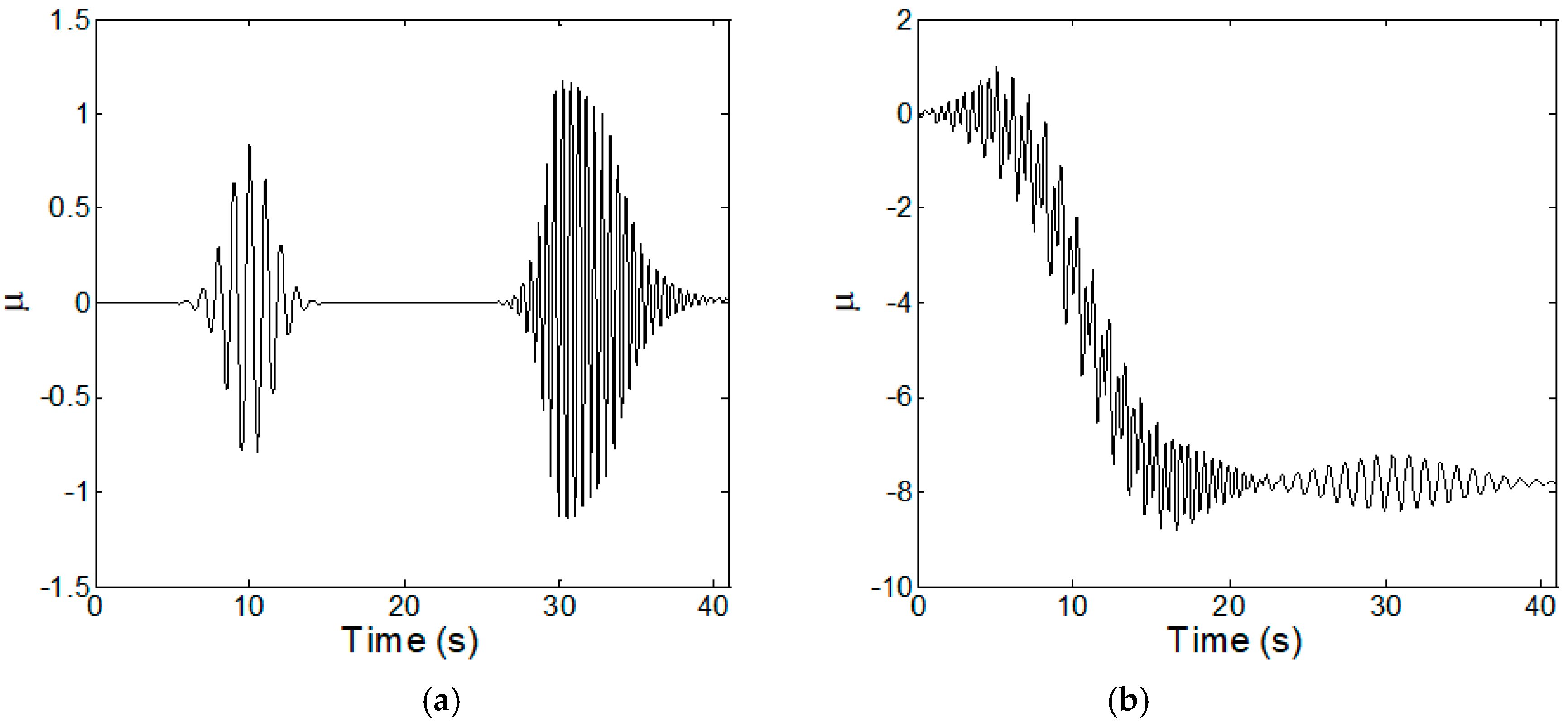
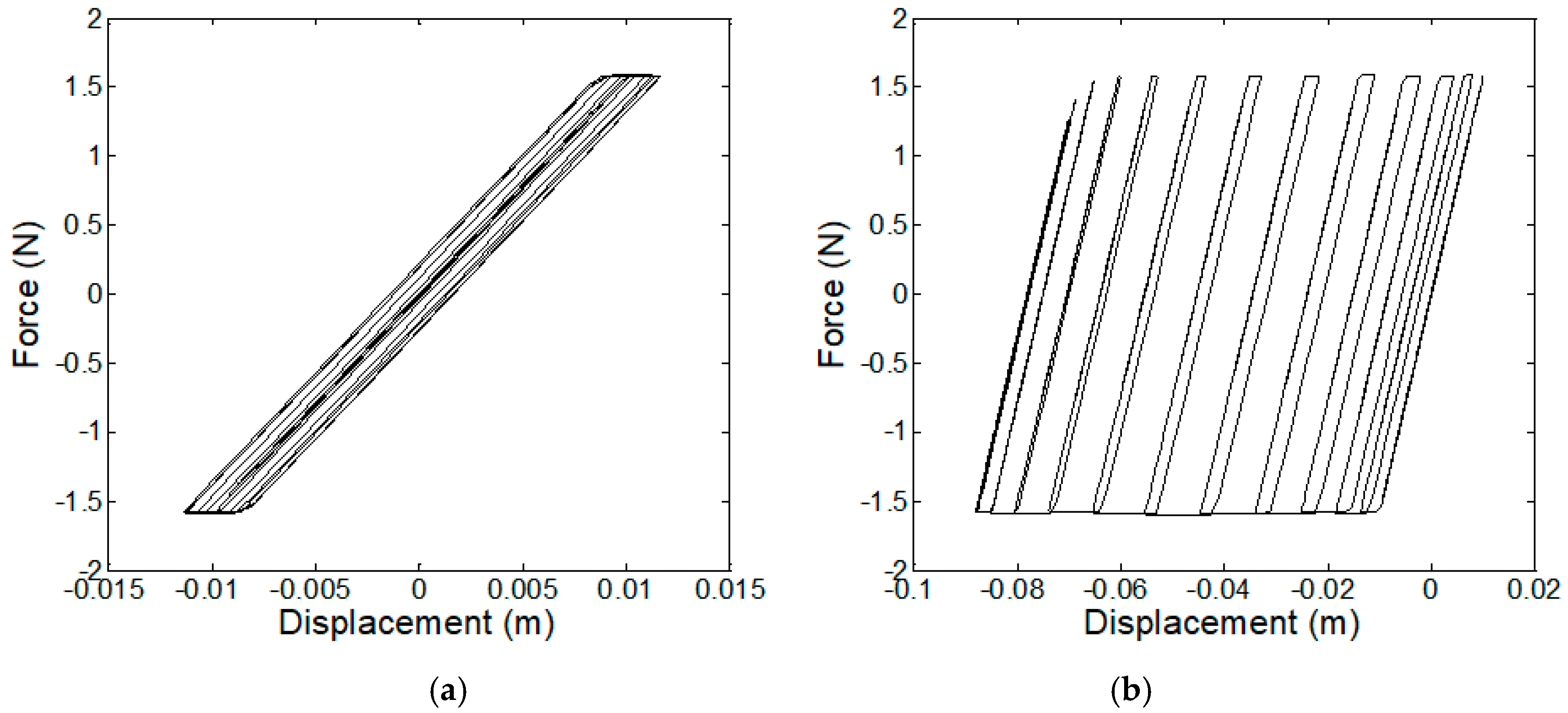
4. Influence of Time-Frequency Energy Distribution of Ground motion on Structural Response
4.1. Influence of Time-Frequency Energy Distribution of Simple Input on Structural Response
4.2. Influence of Time-Frequency Energy Distribution of Ground Motion on Structural Response
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, Z.; Chen, X.Y.; Lu, X.L. Shaking table test and numerical simulation of an RC frame-core tube structure for earthquake-induced collapse. Earthq. Eng. Struct. Dyn. 2016, 45, 1537–1556. [Google Scholar] [CrossRef]
- Spencer, B.F.; Yao, J.T.P. Structural control: Past, present, and future. J. Eng. Mech. (ASCE) 1997, 123, 897–971. [Google Scholar]
- Spencer, B.F., Jr.; Nagarajaiah, S. State of the Art of Structural Control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Housner, G.W.; Bergman, L.A.; Caughey, T.K.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.T.; Li, S.; Tang, J. On vibration suppression and energy dissipation using tuned mass particle damper. J. Vib. Acoust. 2017, 139, 011008. [Google Scholar]
- Lu, Z.; Chen, X.Y.; Li, X.W.; Li, P.Z. Optimization and application of multiple tuned mass dampers in the vibration control of pedestrian bridges. Struct. Eng. Mech. 2017, 62, 55–64. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, X.Y.; Zhou, Y. An equivalent method for optimization of particle tuned mass damper based on experimental parametric study. J. Sound Vib. 2018, 419, 571–584. [Google Scholar] [CrossRef]
- Lu, Z.; Huang, B.; Zhou, Y. Theoretical study and experimental validation on the energy dissipation mechanism of particle dampers. Struct. Control Health Monit. 2018, 25, e2125. [Google Scholar] [CrossRef]
- Hu, Y.X. Earthquake Engineering; Seismological Press: Beijing, China, 2006; pp. 380–382. [Google Scholar]
- Bozorgnia, Y.; Bertero, V.V. Earthquake Engineering: From Engineering Seismology to Performance-Based Engineering; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Cacciola, P.; Deodatis, G. A method for generating fully non-stationary and spectrum-compatible ground motion vector processes. Soil Dyn. Earthq. Eng. 2011, 31, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Sgobba, S.; Stafford, P.; Marano, G.; Guaragnella, C. An evolutionary stochastic ground-motion model defined by a seismological scenario and socal site conditions. Soil Dyn. Earthq. Eng. 2011, 31, 1465–1479. [Google Scholar] [CrossRef]
- Zentner, I.; Poirion, F. Enrichment of seismic ground motion databases using Karhunen–Loève expansion. Soil Dyn. Earthq. Eng. 2012, 41, 1945–1957. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, F.; Yang, C. Generation of nonstationary artificial ground motion based on the Hilbert transform. Bull. Seismol. Soc. Am. 2012, 102, 2405–2419. [Google Scholar] [CrossRef]
- Rezaeian, S.; Der Kiureghian, A. Simulation of orthogonal horizontal ground motion components for specified earthquake and site characteristics. Soil Dyn. Earthq. Eng. 2012, 41, 335–353. [Google Scholar] [CrossRef]
- Iyama, J.; Kuwamura, H. Application of wavelets to analysis and simulation of earthquake motions. Soil Dyn. Earthq. Eng. 1999, 28, 255–272. [Google Scholar] [CrossRef]
- Beck, J.L.; Papadimitriou, C. Moving resonance in nonlinear response to fully nonstationary stochastic ground motion. Probab. Eng. Mech. 1993, 8, 157–167. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Wu, Z.J.; Zhang, J.J.; Wang, Z.J.; Wu, X.X.; Wang, M.Y. Time-frequency analysis on amplification of seismic ground motion. Rock Soil Mech. 2017, 138, 685–695. [Google Scholar]
- Zhang, Y.S.; Zhao, F.X. Validation of non-stationary ground motion simulation method based on Hilbert transform. Acta Seismol. Sin. 2014, 36, 686–697. [Google Scholar]
- Wang, D.; Fan, Z.L.; Hao, S.W.; Zhao, D.H. An evolutionary power spectrum model of fully nonstationary seismic ground motion. Soil Dyn. Earthq. Eng. 2018, 105, 1–10. [Google Scholar] [CrossRef]
- Naga, P.; Eatherton, M.R. Analyzing the effect of moving resonance on seismic response of structures using wavelet transforms. Soil Dyn. Earthq. Eng. 2013, 43, 759–768. [Google Scholar] [CrossRef] [Green Version]
- Yazdani, A.; Takada, T. Wavelet-based generation of energy- and spectrum-compatible earthquake time histories. Comput.-Aided Civ. Infrastruct. Eng. 2009, 24, 623–630. [Google Scholar] [CrossRef]
- Sun, D.B.; Ren, Q.W. Seismic damage analysis of concrete gravity dam based on wavelet transform. Shock Vib. 2016, 2016, 6841836. [Google Scholar] [CrossRef]
- Altunisik, A.C.; Genc, A.F.; Gunaydin, M.; Okur, F.Y.; Karahasan, O.S. Dynamic response of a historical armory building using the finite element model validated by the ambient vibration test. J. Vib. Control 2018, 24, 5472–5484. [Google Scholar] [CrossRef]
- Bai, Y.T.; Guan, S.Y.; Lin, X.C.; Mou, B. Seismic collapse analysis of high-rise reinforced concrete frames under long-period ground motions. Struct. Des. Tall Spec. Build. 2019, 28, e1566. [Google Scholar] [CrossRef]
- Han, Q.; Wen, J.N.; Du, X.L.; Zhong, Z.L.; Hao, H. Nonlinear seismic response of a base isolated single pylon cable-stayed bridge. Eng. Struct. 2018, 175, 806–821. [Google Scholar] [CrossRef]
- Li, X.Q.; Li, Z.X.; Crewe, A.J. Nonlinear seismic analysis of a high-pier, long-span, continuous RC frame bridge under spatially variable ground motions. Soil Dyn. Earthq. Eng. 2018, 114, 298–312. [Google Scholar] [CrossRef]
- Cao, H.; Friswell, M.I. The effect of energy concentration of earthquake ground motions on the nonlinear response of RC structures. Soil Dyn. Earthq. Eng. 2009, 29, 292–299. [Google Scholar] [CrossRef]
- Yu, R.F.; Fan, K.; Peng, L.Y.; Yuan, M.Q. Effect of non-stationary characteristics of ground motion on structural response. China Civ. Eng. J. 2010, 43, 13–20. [Google Scholar]
- Zhang, S.R.; Du, Y.F.; Hui, Y.X. Seismic response analysis of isolation structures based on wavelet transformation. China Earthq. Eng. J. 2017, 39, 836–842. [Google Scholar]
- Yaghmaei-Sabegh, S. Time-frequency analysis of the 2012 double earthquakes records in north-west of Iran. Bull. Earthq. Eng. 2014, 12, 585–606. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z.F. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Proc. 1993, 41, 3397–3415. [Google Scholar] [CrossRef] [Green Version]
- Neff, R.; Zakhor, A. Very low bit-rate video coding based on matching pursuits. IEEE Trans. Circuits Syst. Video Technol. 1997, 7, 158–171. [Google Scholar] [CrossRef] [Green Version]
- Gribonval, R. Fast matching pursuit with a multiscale dictionary of Gaussian chirps. IEEE Trans. Signal Proc. 2001, 49, 994–1001. [Google Scholar] [CrossRef] [Green Version]
- Gribonval, R.; Bacry, E. Harmonic decomposition of audio signals with matching pursuit. IEEE Trans. Signal Proc. 2003, 51, 101–111. [Google Scholar] [CrossRef] [Green Version]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Signal Proc. 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Needell, D.; Vershynin, R. Signal recovery from incomplete and inaccurate measurements via regularized orthogonal matching pursuit. IEEE J. Sel. Top. Signal Proc. 2010, 4, 310–316. [Google Scholar] [CrossRef]
- Yang, B.; Li, S.T. Pixel-level image fusion with simultaneous orthogonal matching pursuit. Inf. Fusion 2012, 13, 10–19. [Google Scholar] [CrossRef]
- Liu, X.Y.; Zhao, Z.G. Research on compressed sensing reconstruction algorithm in complementary space. In Proceedings of the IEEE 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017. [Google Scholar]
- Charles, I.P.; John, P.C. Comparison of frequency attributes from CWT and MPD spectral decompositions of a complex turbidite channel model. In Proceedings of the Expanded Abstracts of 78th SEG Annual International Meeting, Las Vegas, NV, USA, 9–14 November 2008; pp. 394–397. [Google Scholar]
- Tao, D.W.; Li, H. Time-frequency energy distribution of wenchuan earthquake motions based on matching pursuit decomposition. In Proceedings of the 7th International Conference on Urban Earthquake Engineering (7CUEE) & 5th International Conference on Earthquake Engineering (5ICEE), Tokyo, Japan, 3–5 March 2010. [Google Scholar]
- Montejo, L.A.; Kowalsky, M.J. Estimation of frequency-dependent strong motion duration via wavelets and its influence on nonlinear seismic response. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 253–264. [Google Scholar] [CrossRef]
- Chandramohan, R.; Baker, J.W.; Deierlein, G.G. Quantifying the influence of ground motion duration on structural collapse capacity using spectrally equivalent records. Earthq. Spectra 2016, 43, 927–950. [Google Scholar] [CrossRef]
- Ahn, I.S.; Chen, S.S.; Dargush, G.F. Dynamic ratcheting in elastoplastic SDOF systems. J. Eng. Mech. 2006, 132, 411–421. [Google Scholar] [CrossRef]
- Challamel, N.; Lanos, C.; Hammouda, A.; Redjel, B. Stability analysis of dynamic ratcheting in elastoplastic systems. Phys. Rev. E 2007, 75, 026204. [Google Scholar] [CrossRef]
- Ahn, I.S.; Chen, S.S.; Dargush, G.F. An iterated maps approach for dynamic ratchetting in SDOF hysteretic damping systems. J. Sound Vib. 2009, 323, 896–909. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site and Component, Ground Motion, Date | Peak Acceleration (g) | Peak Frequency (Hz) |
|---|---|---|
| TCU052-W, Chichi (20 September 1999) | 0.348 | 0.452 |
| I-ELC180, Imperial Valley (19 May 1940) | 0.313 | 1.465 |
| ORR090, Northridge (17 January 1994) | 0.568 | 1.221 |
| C02065, Parkfield (28 June 1966) | 0.476 | 1.428 |
| KJM000, Kobe (16 January 1995) | 0.821 | 1.453 |
| Ground Motion | Number of Ground Motion Records |
|---|---|
| Chichi (20 September 1999) | 71 |
| Imperial Valley (19 May 1940) | 2 |
| Kobe (16 January 1995) | 12 |
| Northridge (17 January 1994) | 77 |
| Parkfield (28 June 1966) | 7 |
| Site and Component, Ground Motion, Date | Peak Acceleration (g) | Peak Frequency (Hz) |
|---|---|---|
| CHY006-E,Chichi (20 September 1999) | 0.364 | 0.595 |
| CHY028-N,Chichi (20 September 1999) | 0.821 | 1.190 |
| CHY029-N,Chichi (20 September 1999) | 0.238 | 0.354 |
| CHY029-W,Chichi (20 September 1999) | 0.277 | 0.403 |
| CHY101-W,Chichi (20 September 1999) | 0.353 | 0.336 |
| I-ELC180,Imperial Valley (19 May 1940) | 0.313 | 1.465 |
| KAK090,Kobe (16 January 1995) | 0.345 | 0.586 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, D.; Lin, J.; Lu, Z. Time-Frequency Energy Distribution of Ground Motion and Its Effect on the Dynamic Response of Nonlinear Structures. Sustainability 2019, 11, 702. https://doi.org/10.3390/su11030702
Tao D, Lin J, Lu Z. Time-Frequency Energy Distribution of Ground Motion and Its Effect on the Dynamic Response of Nonlinear Structures. Sustainability. 2019; 11(3):702. https://doi.org/10.3390/su11030702
Chicago/Turabian StyleTao, Dongwang, Jiali Lin, and Zheng Lu. 2019. "Time-Frequency Energy Distribution of Ground Motion and Its Effect on the Dynamic Response of Nonlinear Structures" Sustainability 11, no. 3: 702. https://doi.org/10.3390/su11030702
APA StyleTao, D., Lin, J., & Lu, Z. (2019). Time-Frequency Energy Distribution of Ground Motion and Its Effect on the Dynamic Response of Nonlinear Structures. Sustainability, 11(3), 702. https://doi.org/10.3390/su11030702