Investigation of Interference Effects Between Wind Turbine and Spar-Type Floating Platform Under Combined Wind-Wave Excitation


Abstract
:1. Introduction
2. Numerical Methods
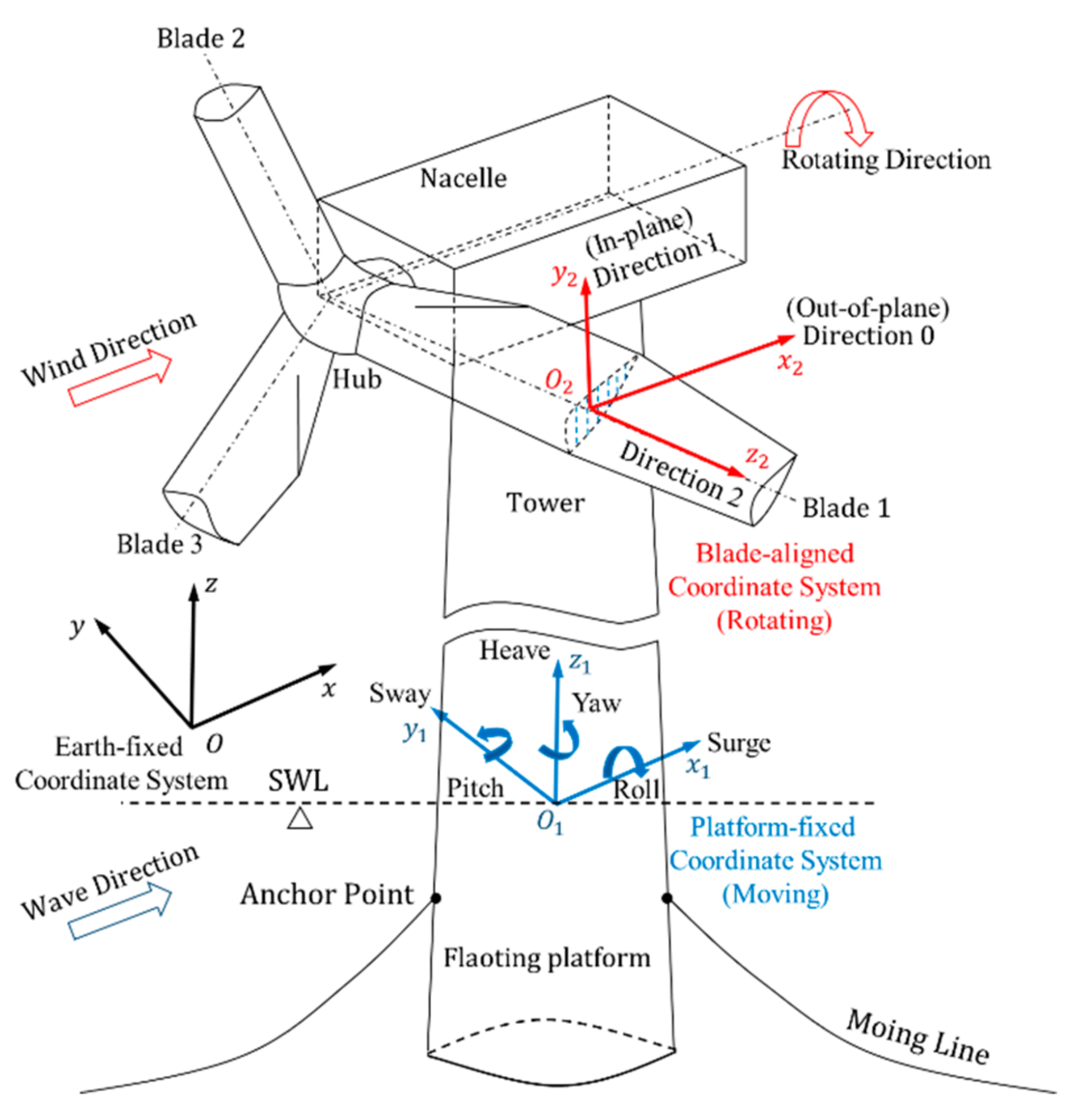
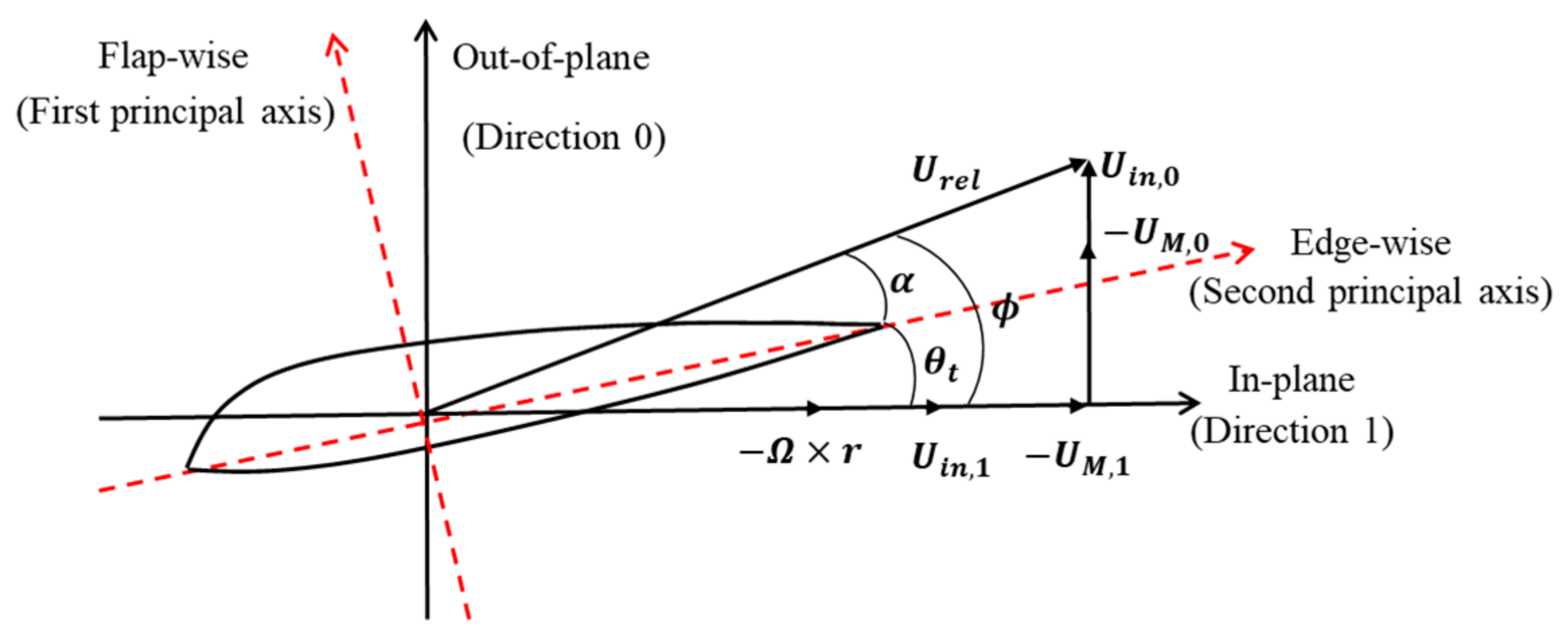
2.1. Inducing 6DOF Platform Motions into ALM
2.2. Considering Aerodynamic Forces in Platform Motions
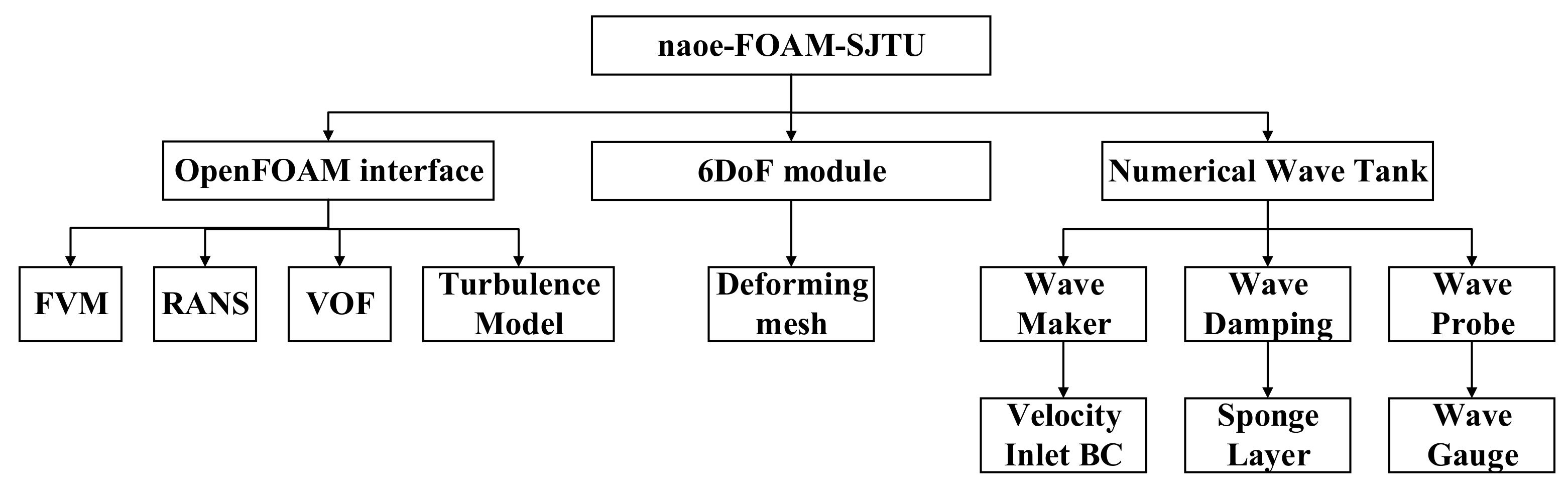
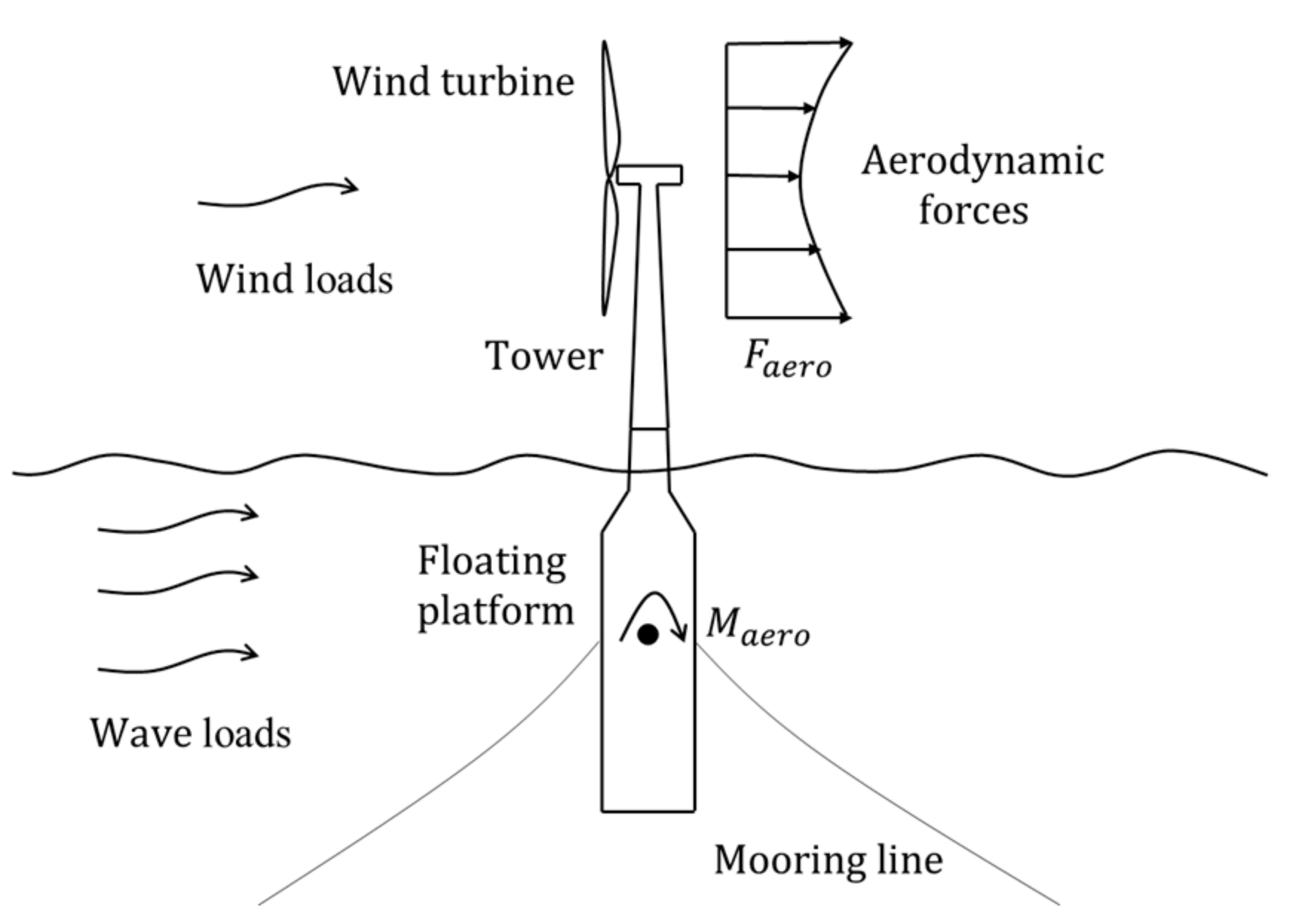
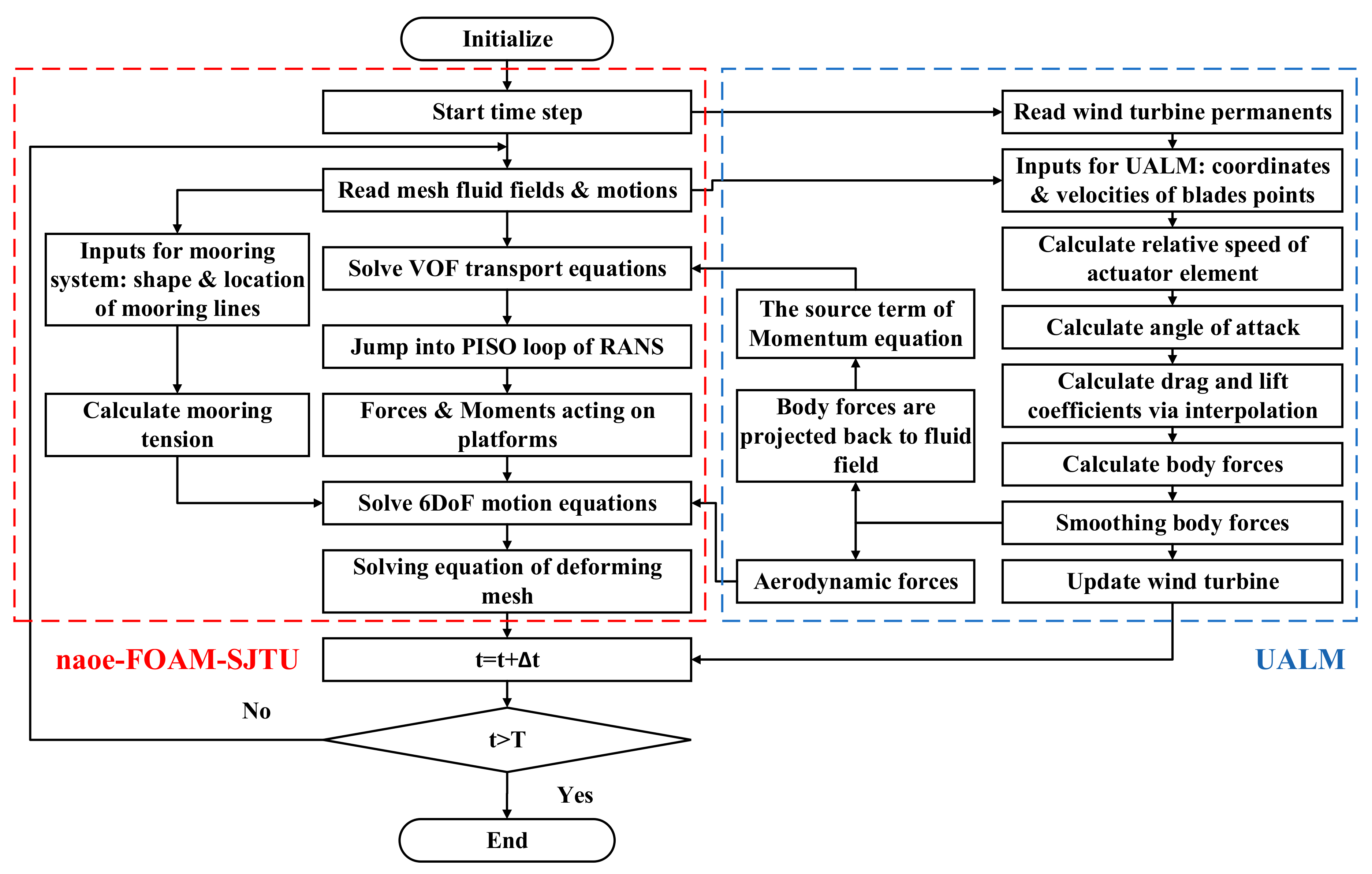
2.3. Coupled Aero-Hydrodynamic Modelling for FOWT
3. Simulation Conditions
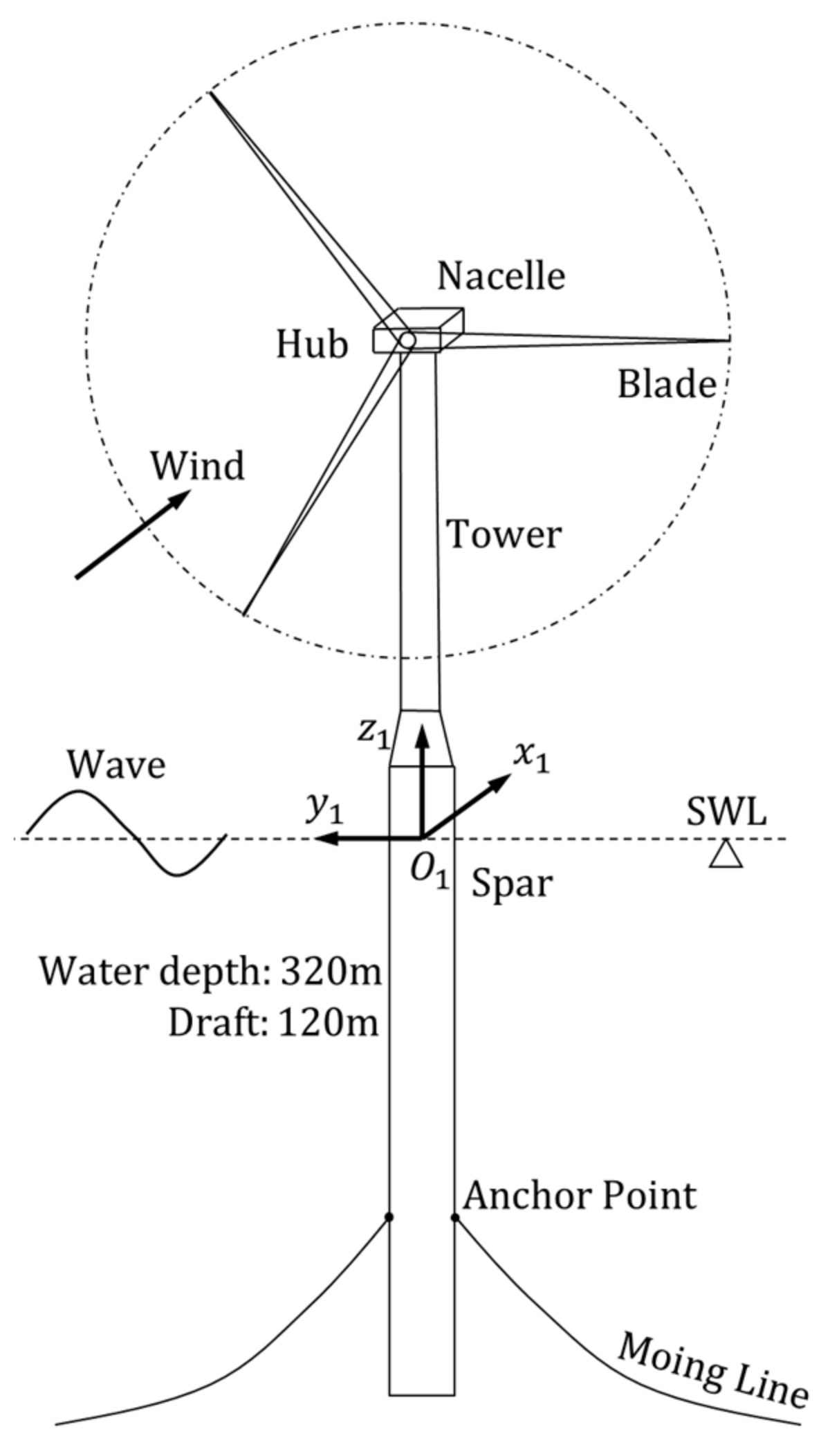
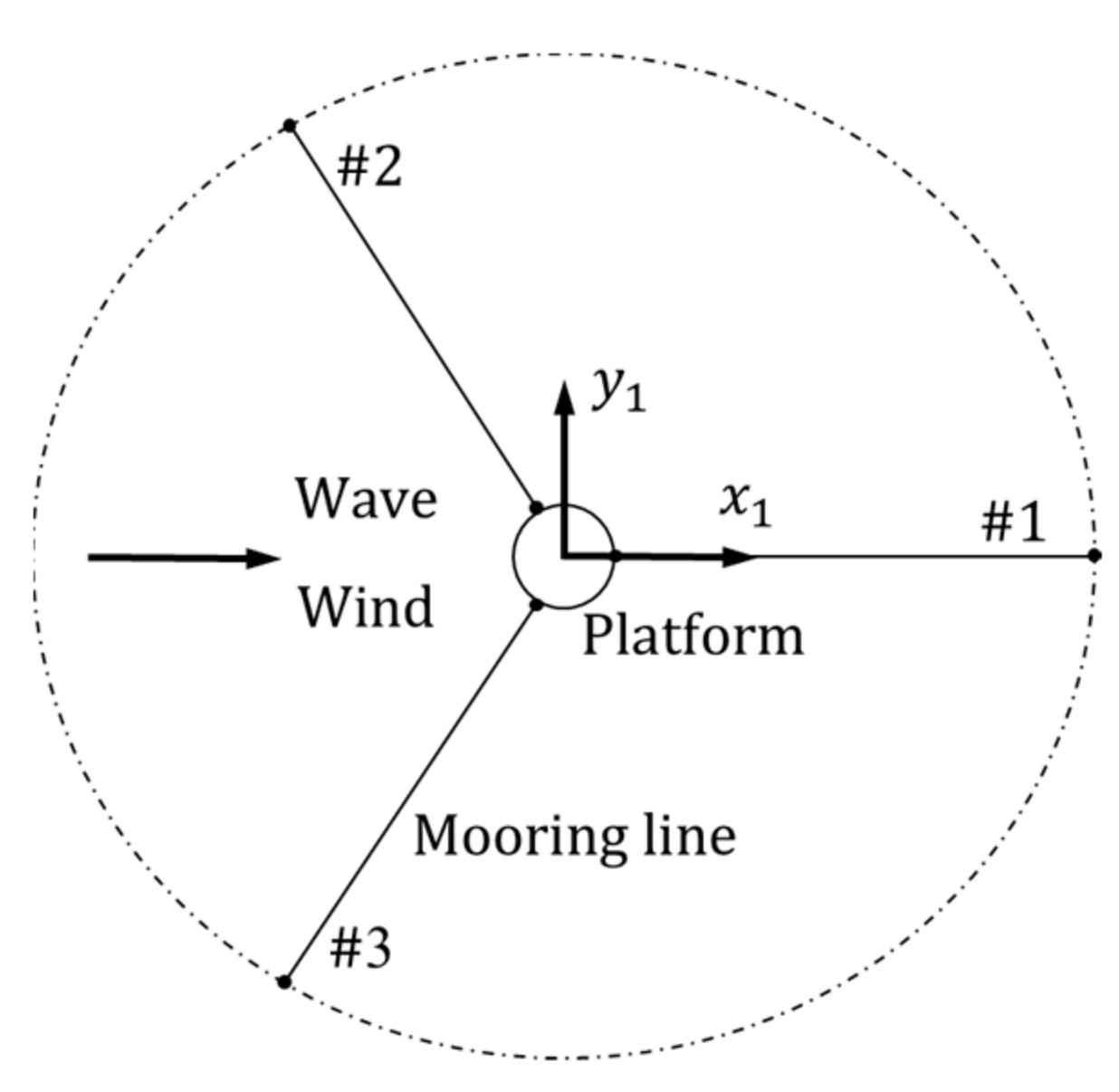
3.1. FOWT Model
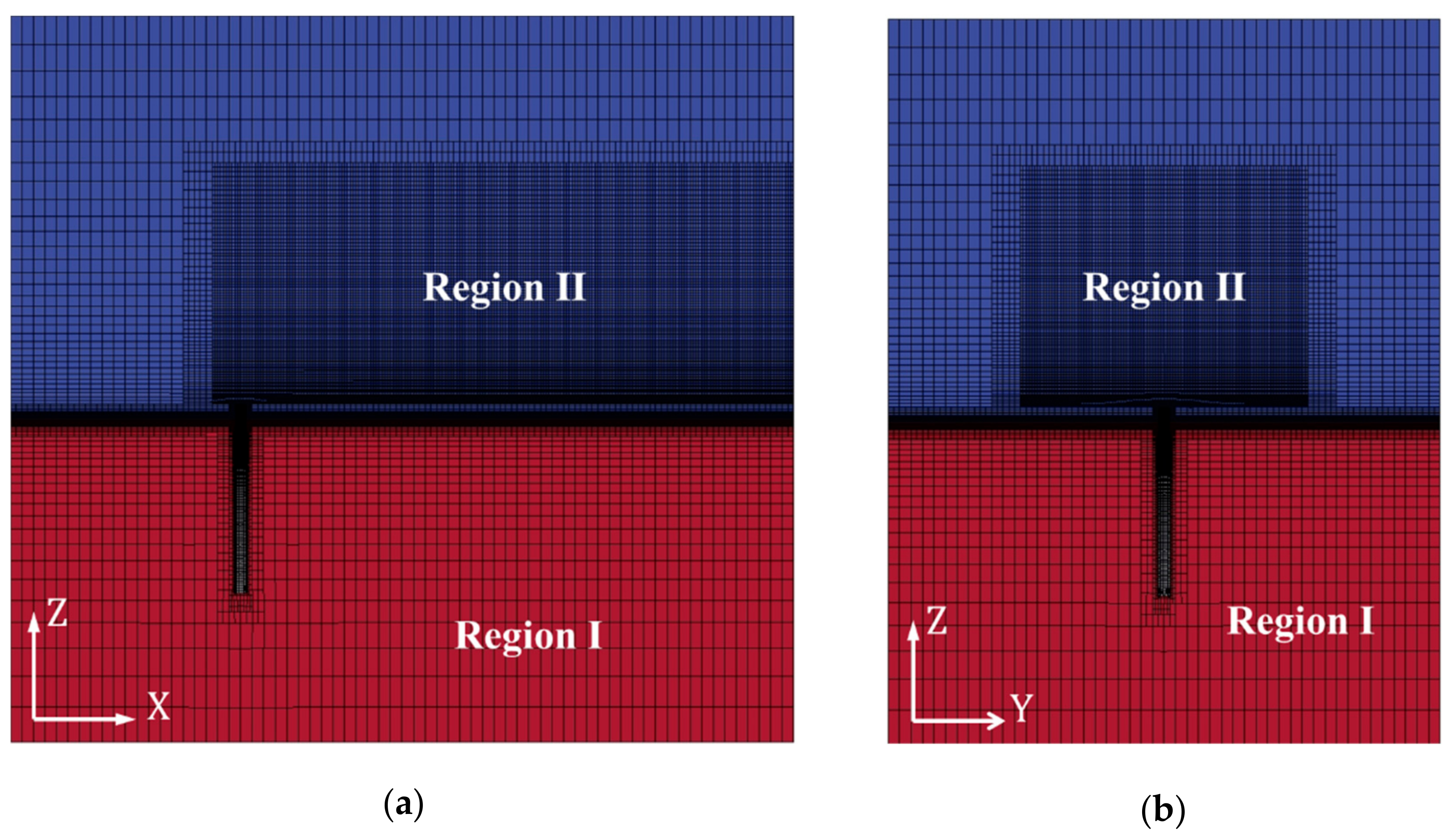
3.2. Computation Set Up
4. Results and Discussions
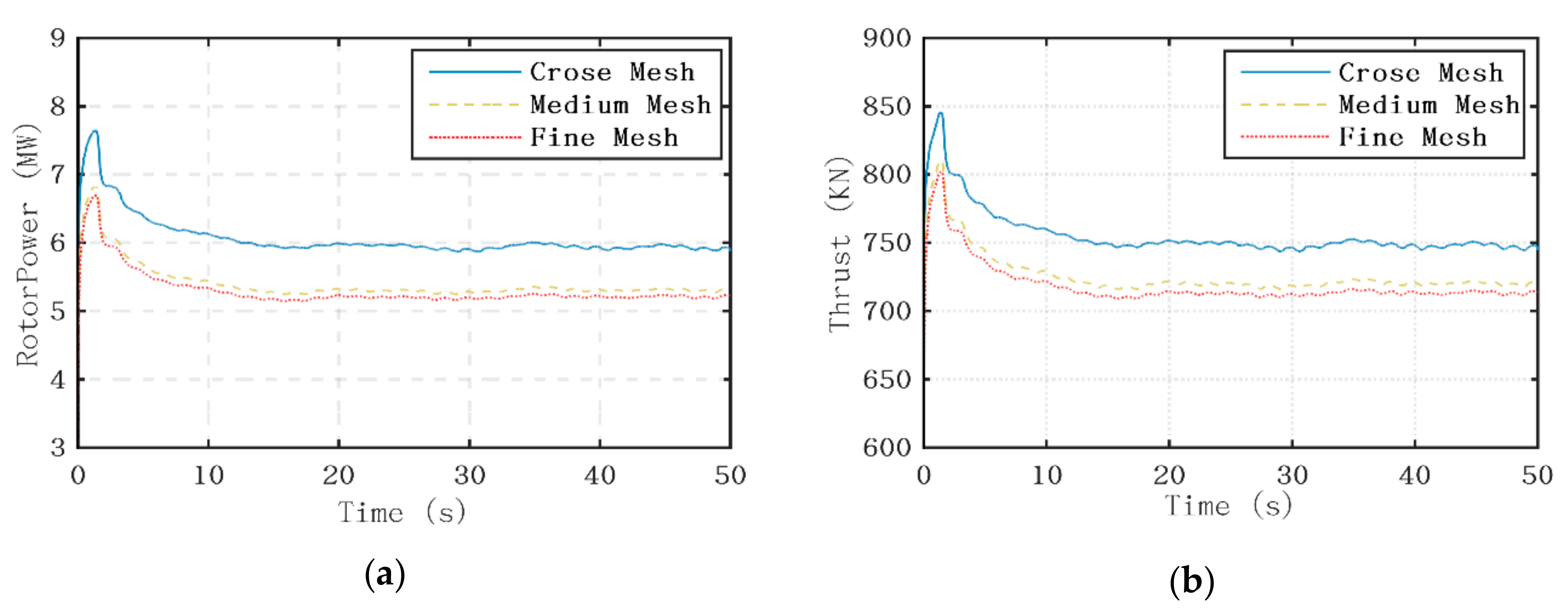
4.1. Grid Convergence Test
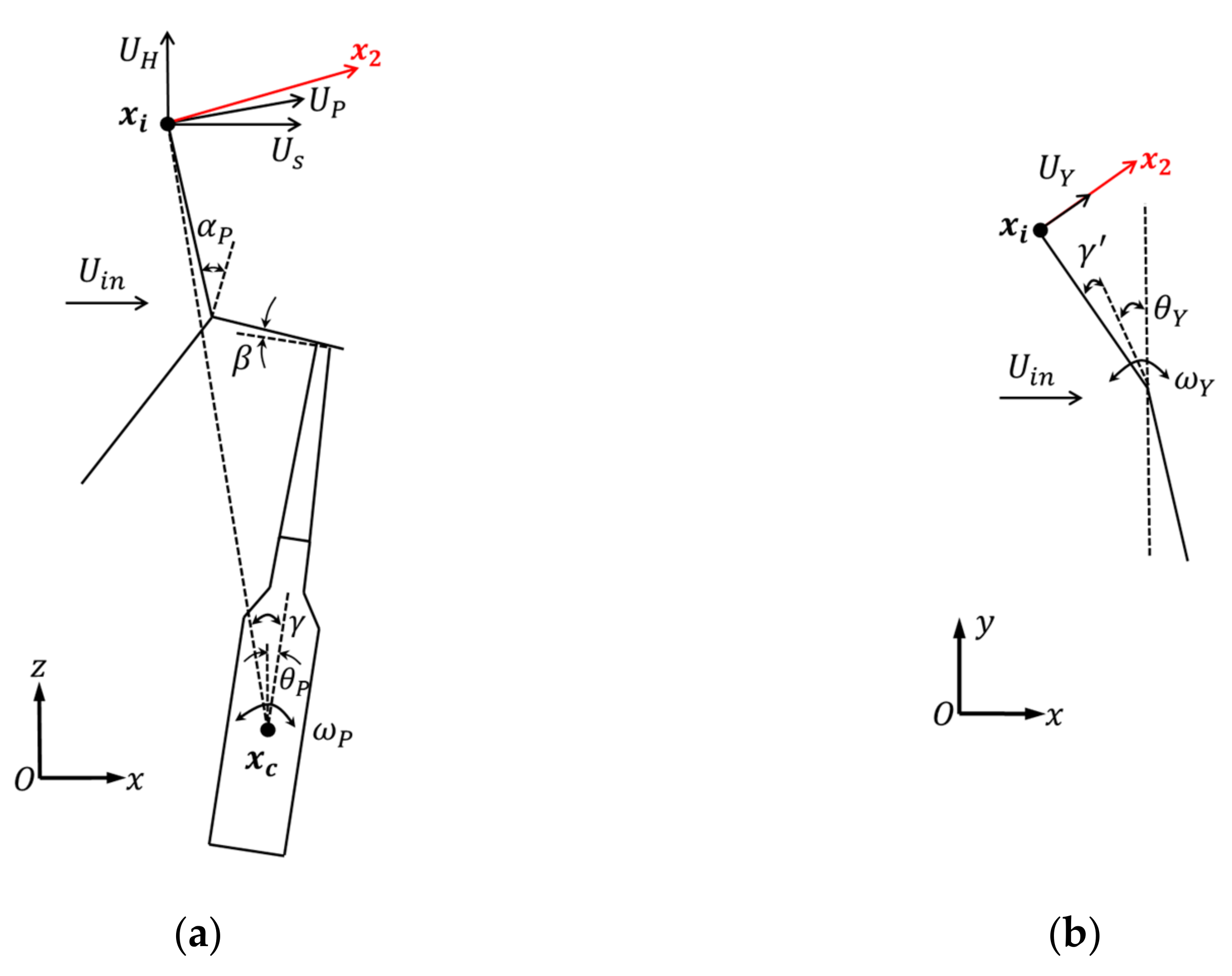
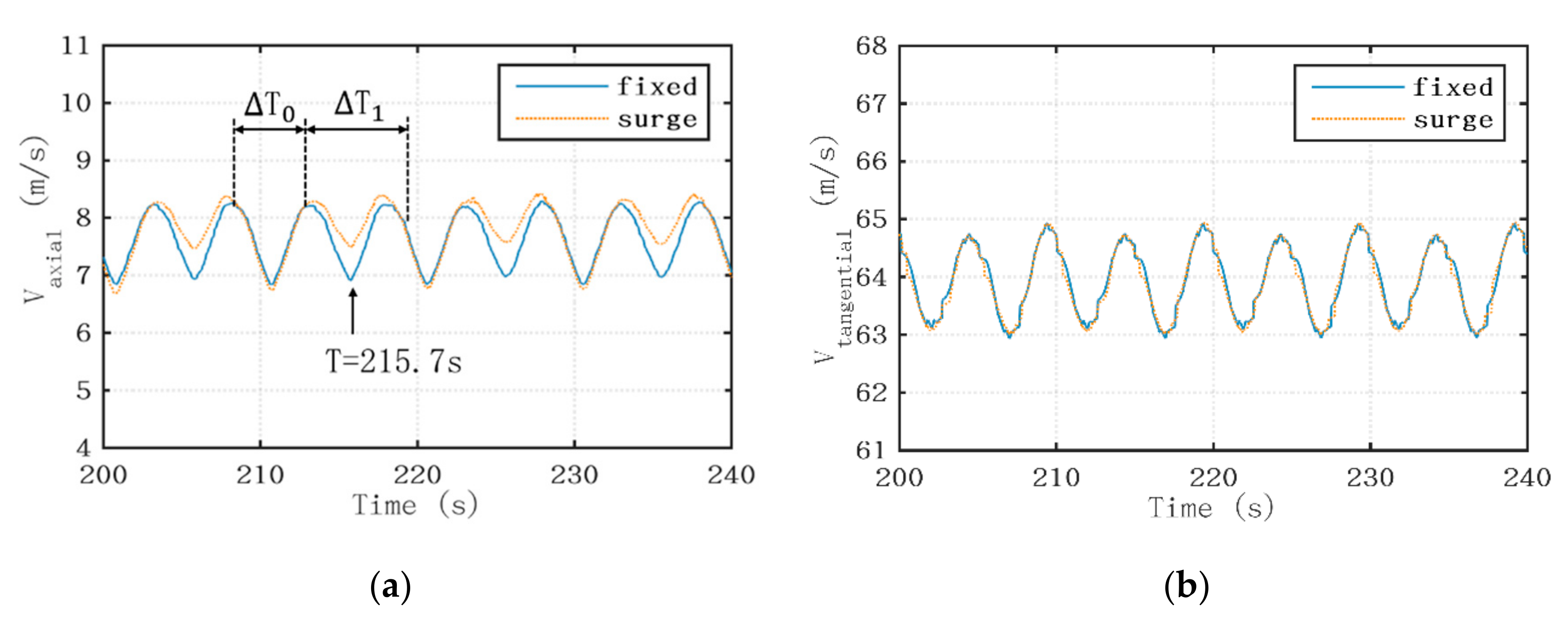
4.2. Additional Velocity Induced by the Platform Motions
4.3. Unsteady Aerodynamic Performance Under Specific Platform Motion
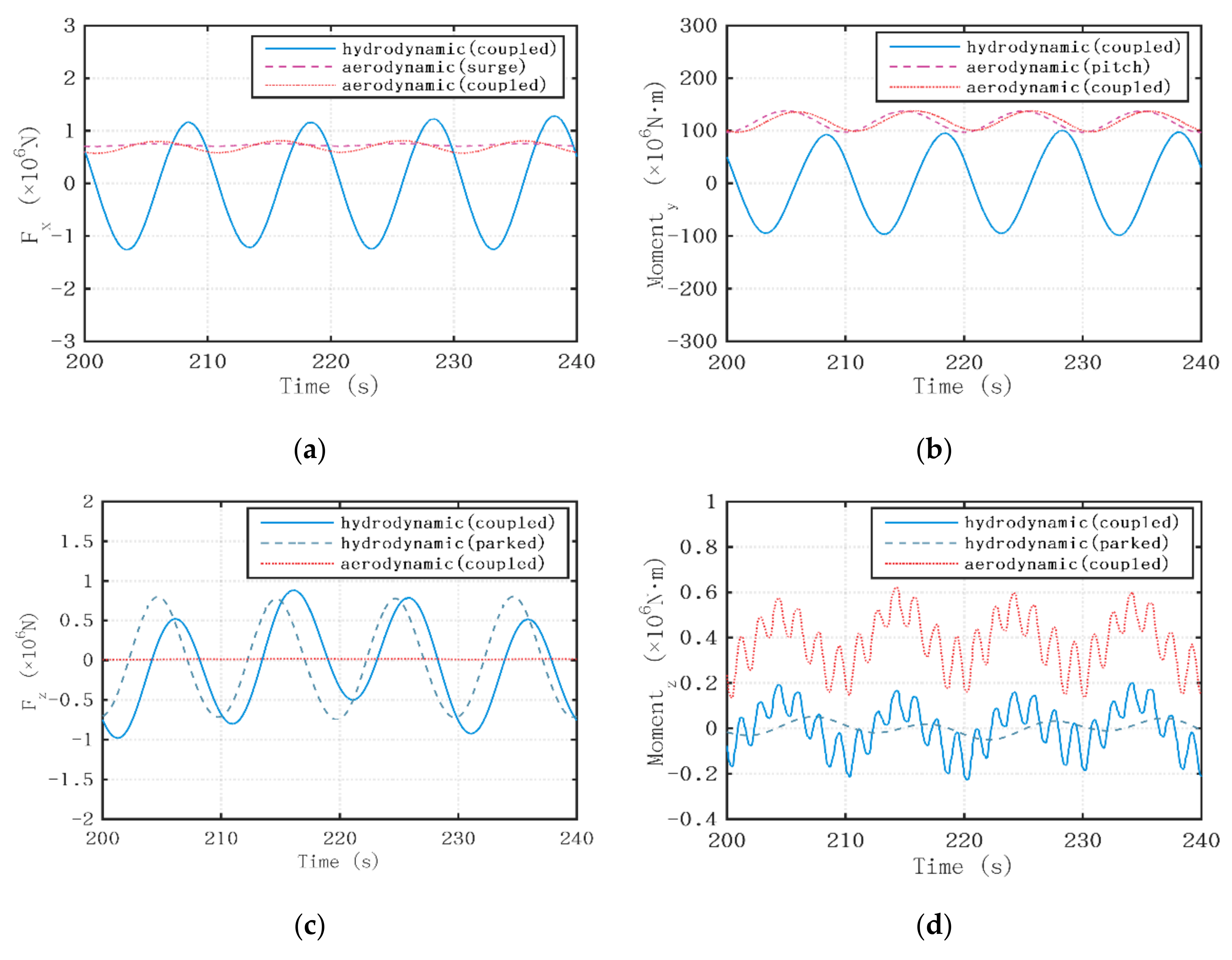
4.4. Platform Motion Responses Under Combined Wind-Wave Loads
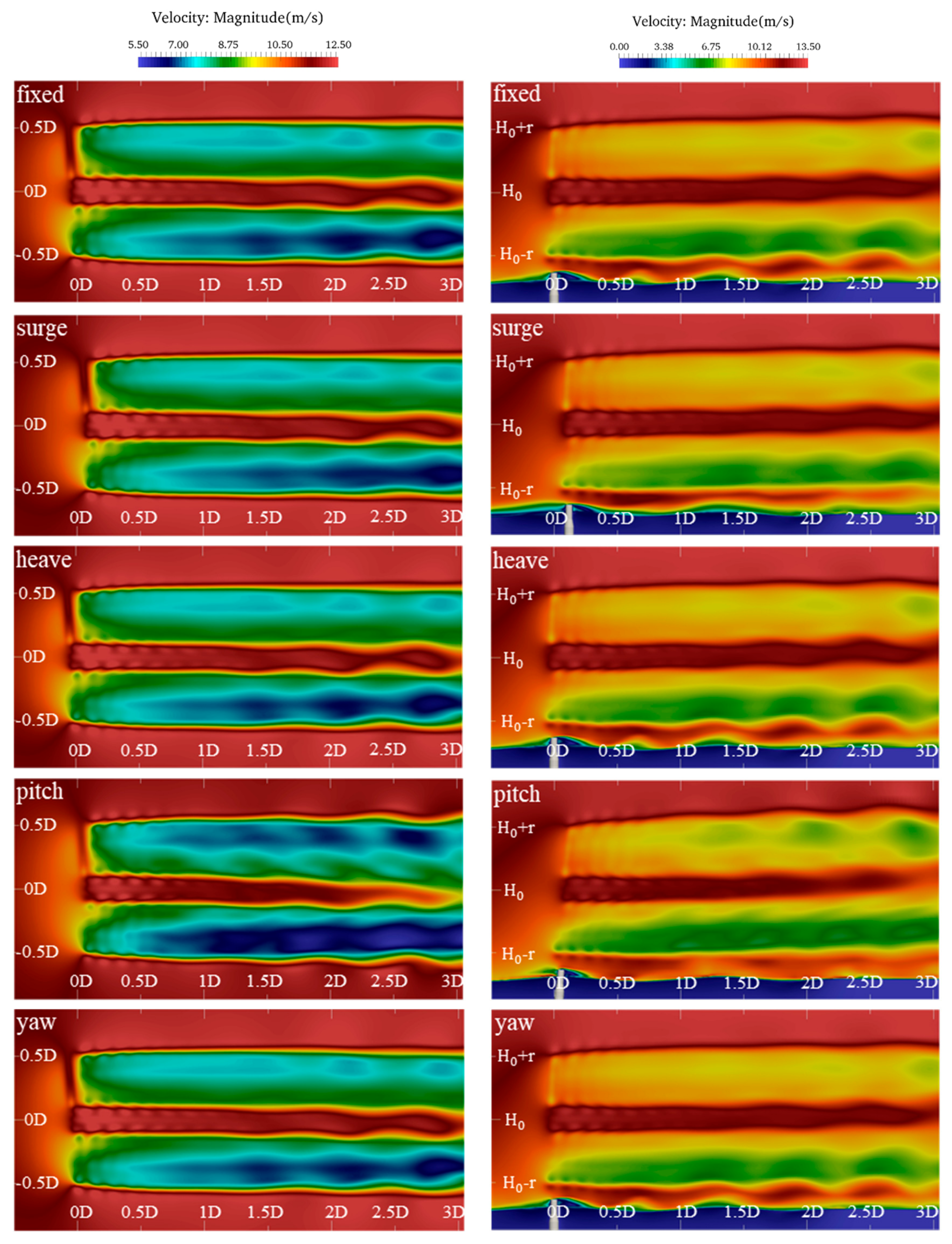
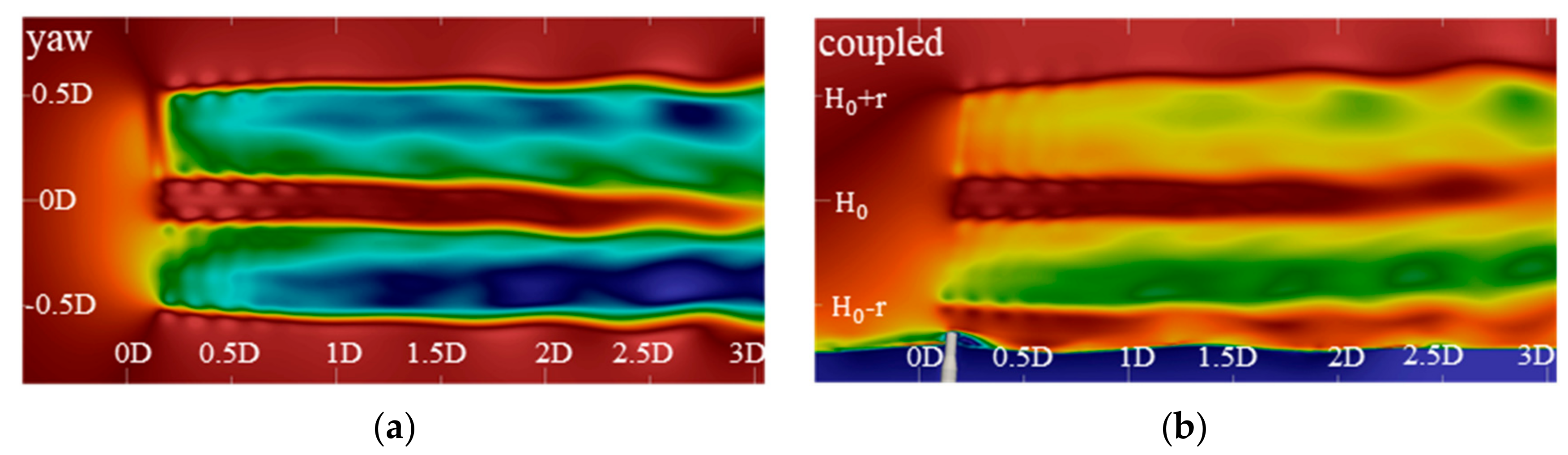
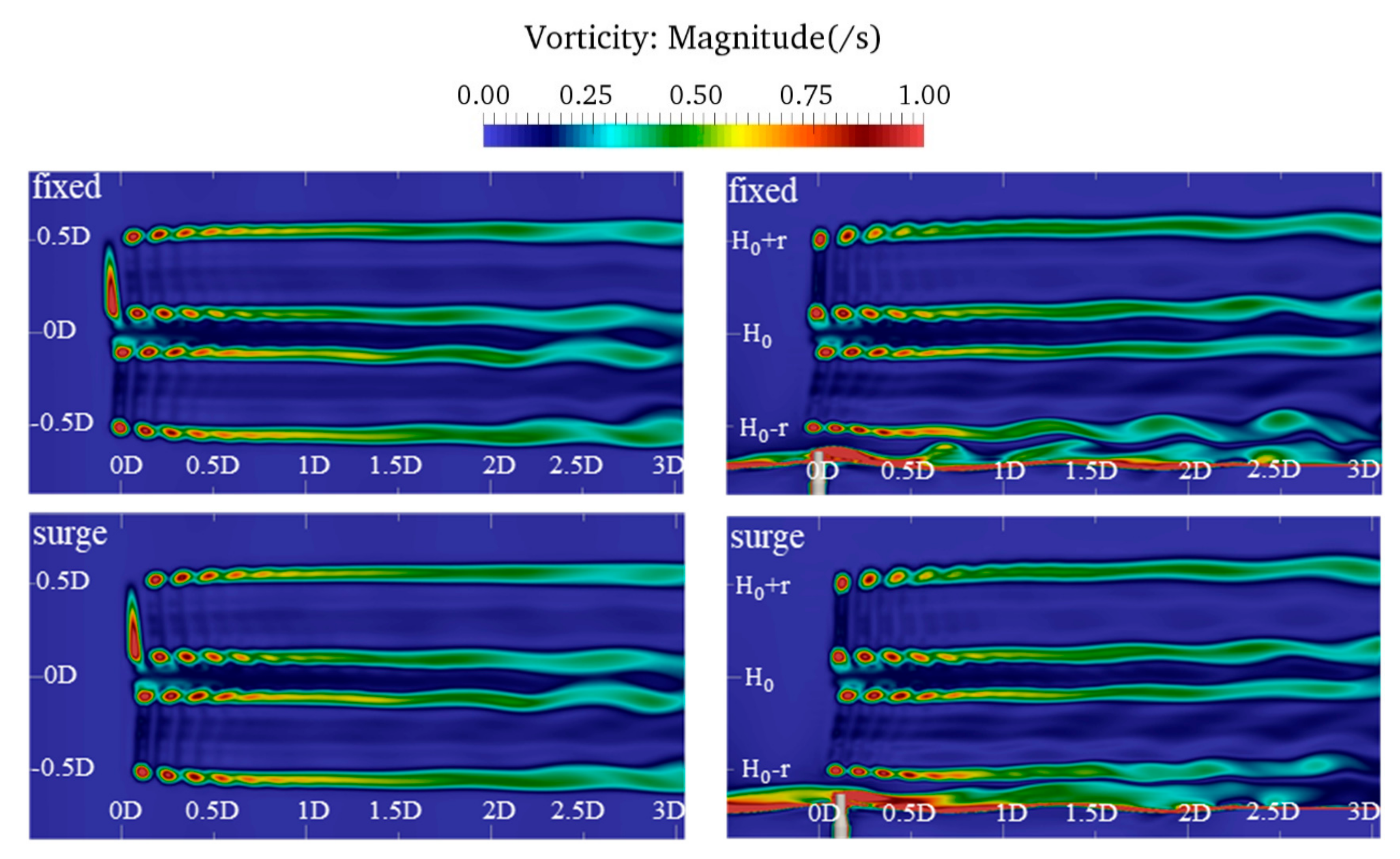
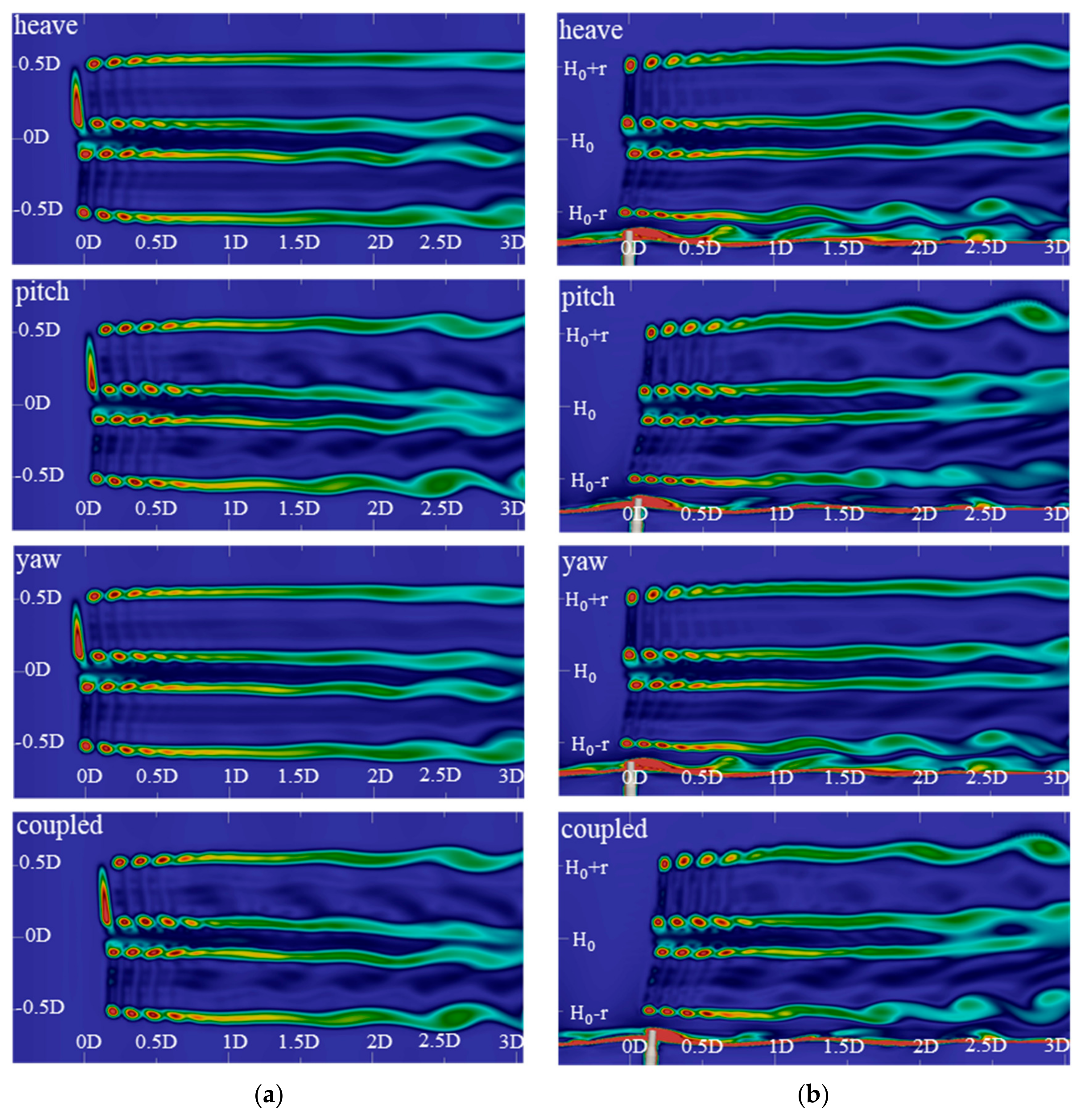
4.5. Interactions Between the Platform Motion and the Rotating Blades in Wake Field
5. Conclusions
- (1)
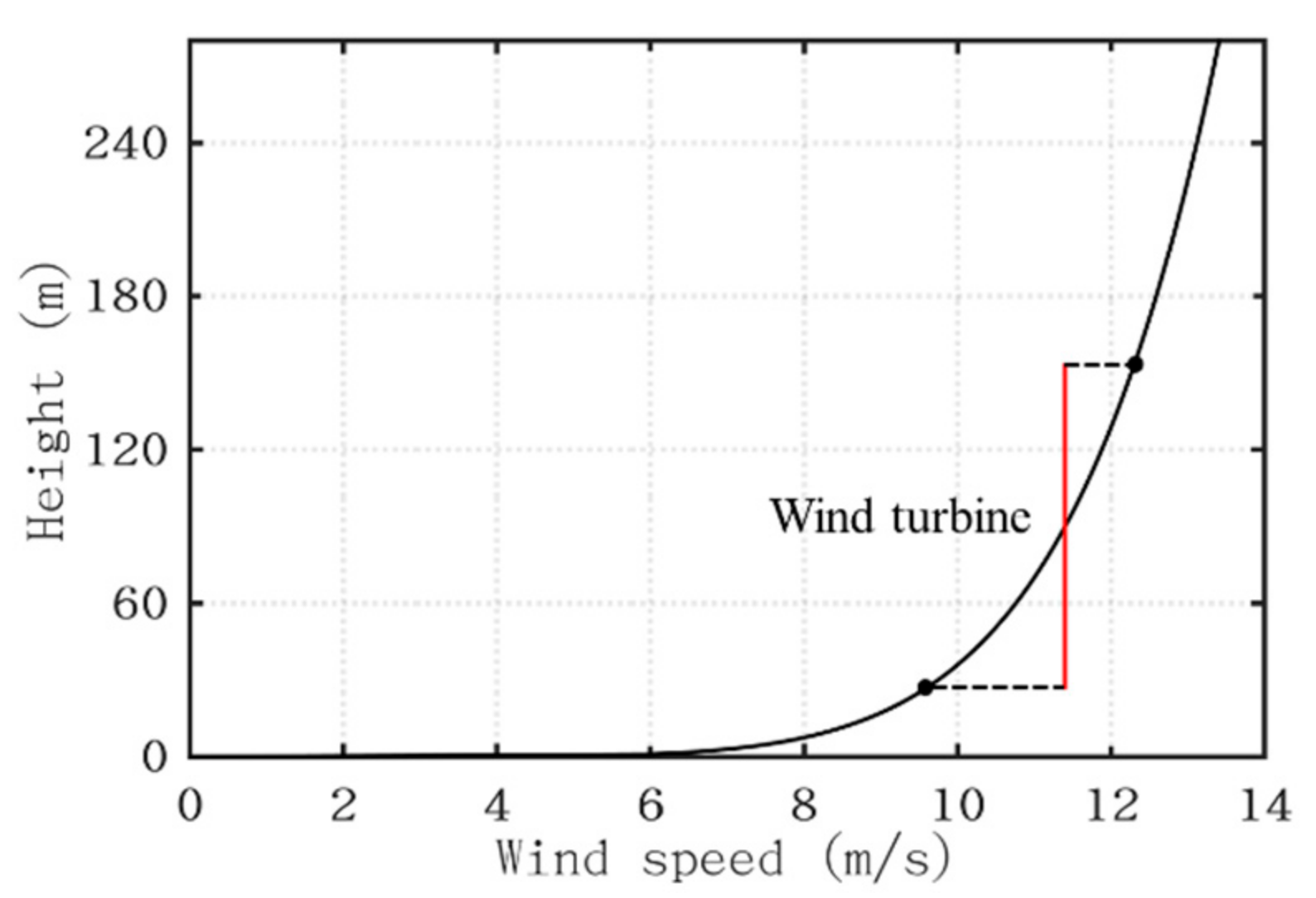
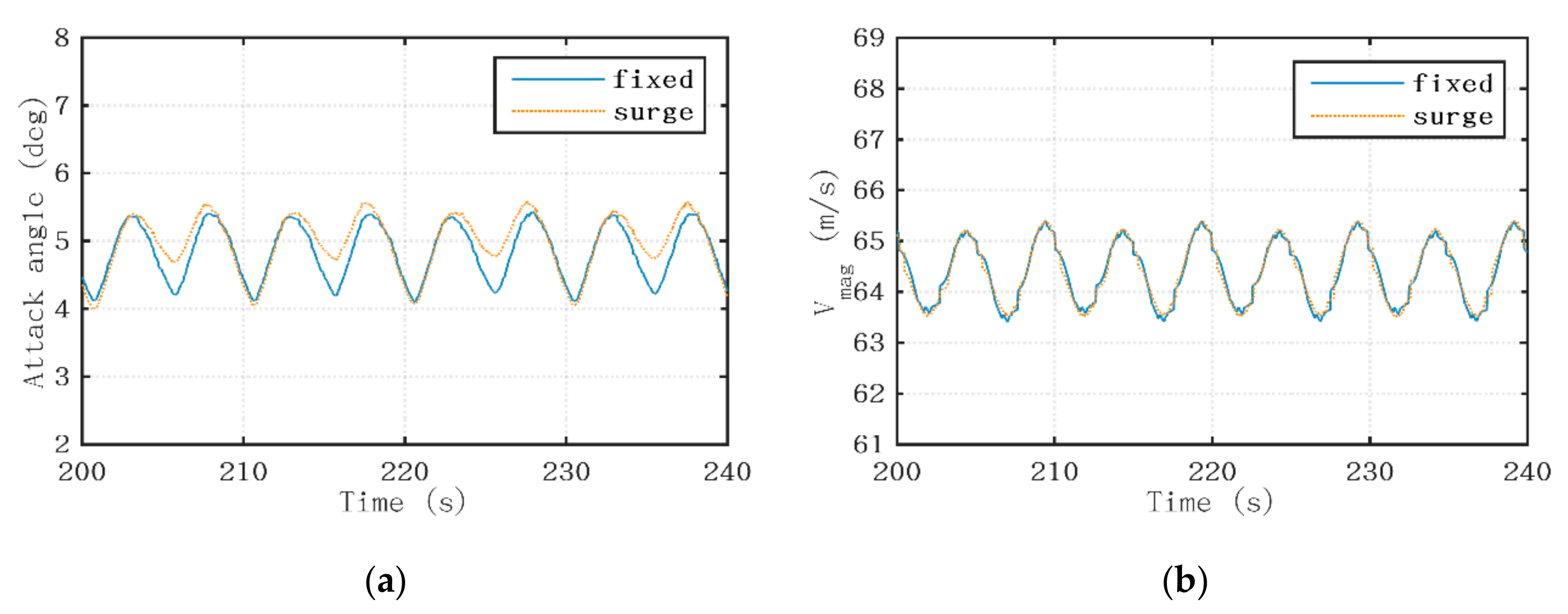
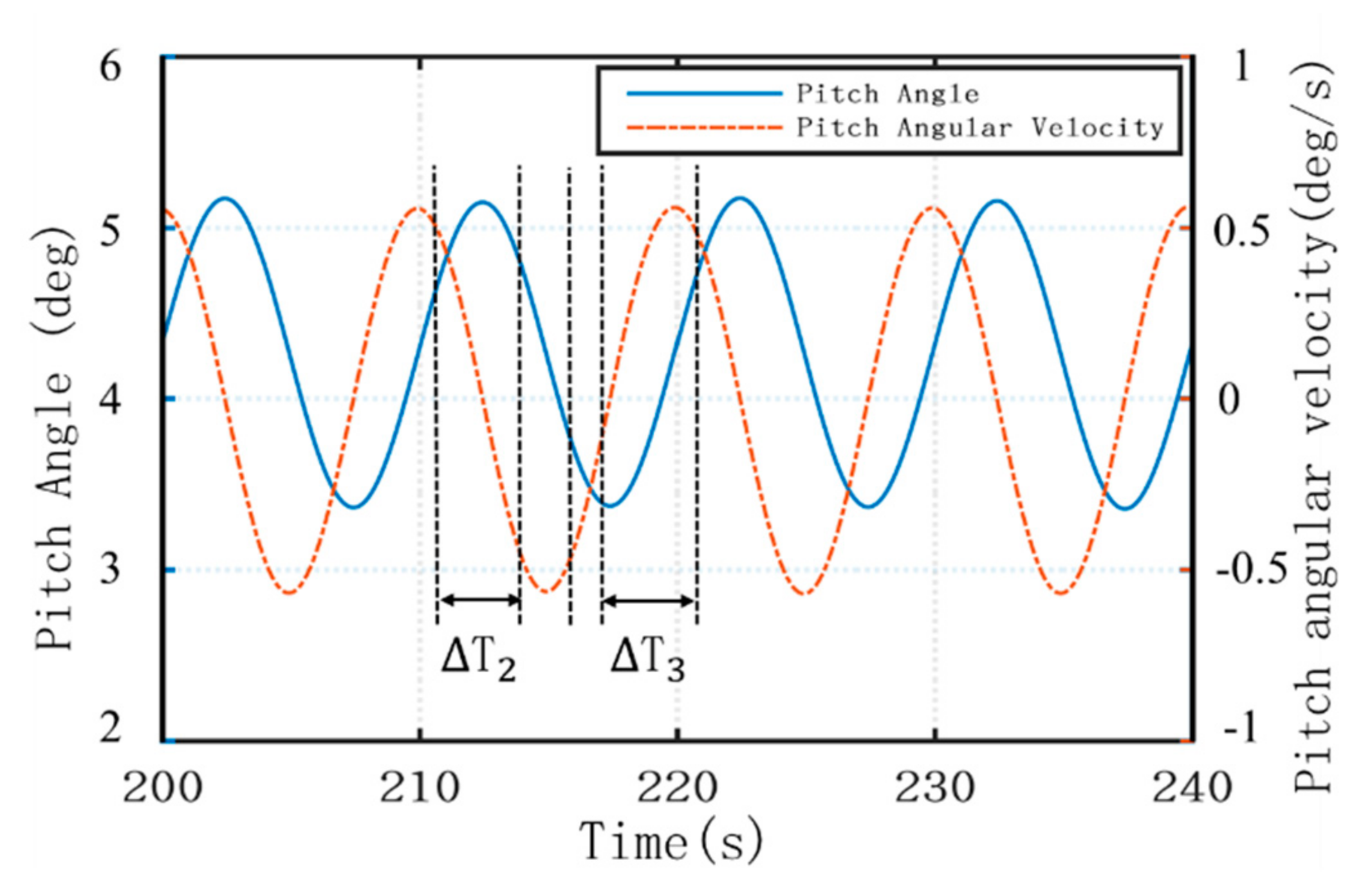
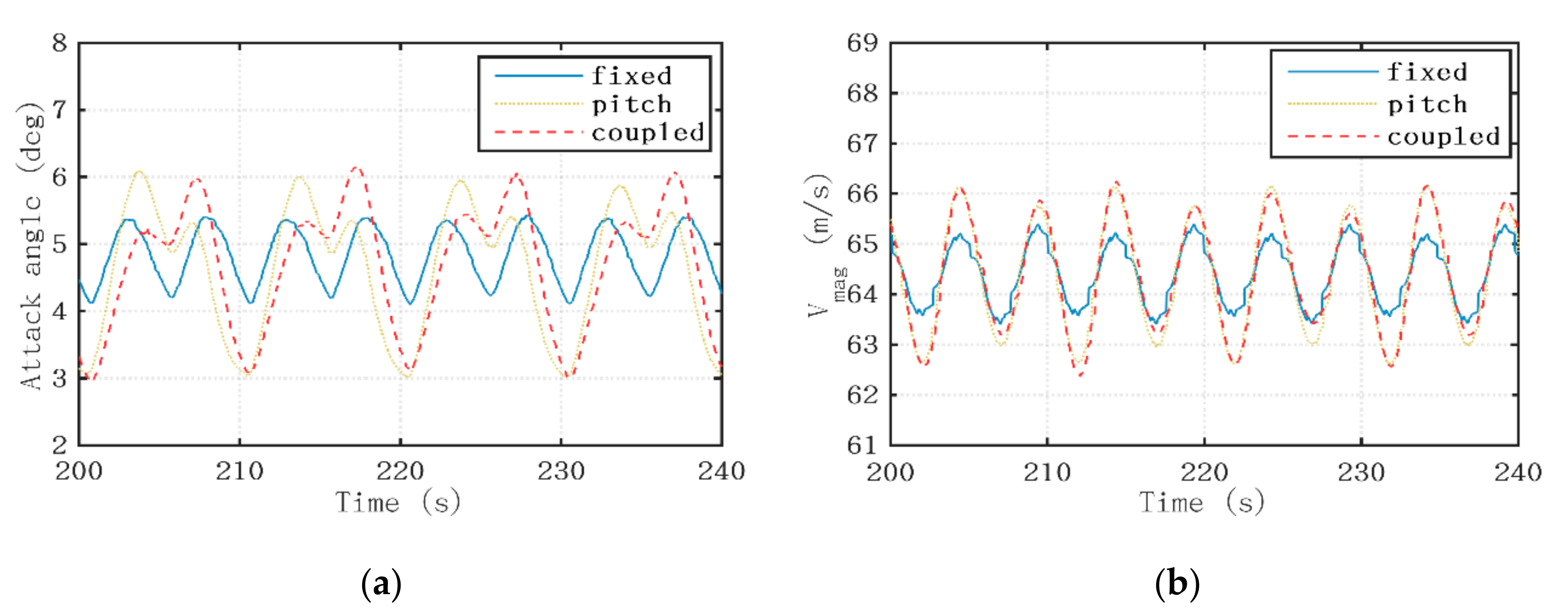
- Both the platform pitch angular velocity and the platform pitch angle have considerable effects on the local relative wind speed and the local attack angle experienced by the rotating blades. The platform surge velocity significantly alters the local attack angle instead of the local relative wind speed. Besides, the height-dependent wind speed, the shaft-title and the pro-cone angle of wind turbine all contribute to the variation of the local attack angle.
- (2)
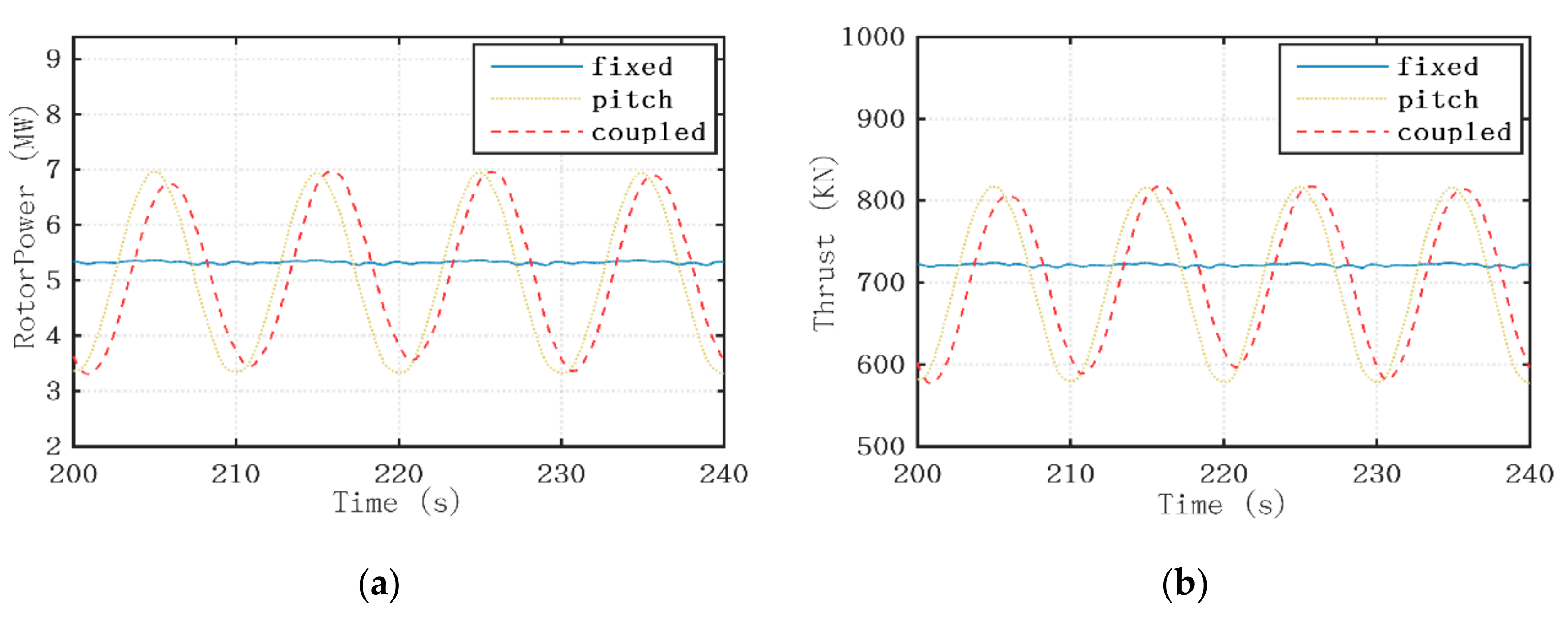
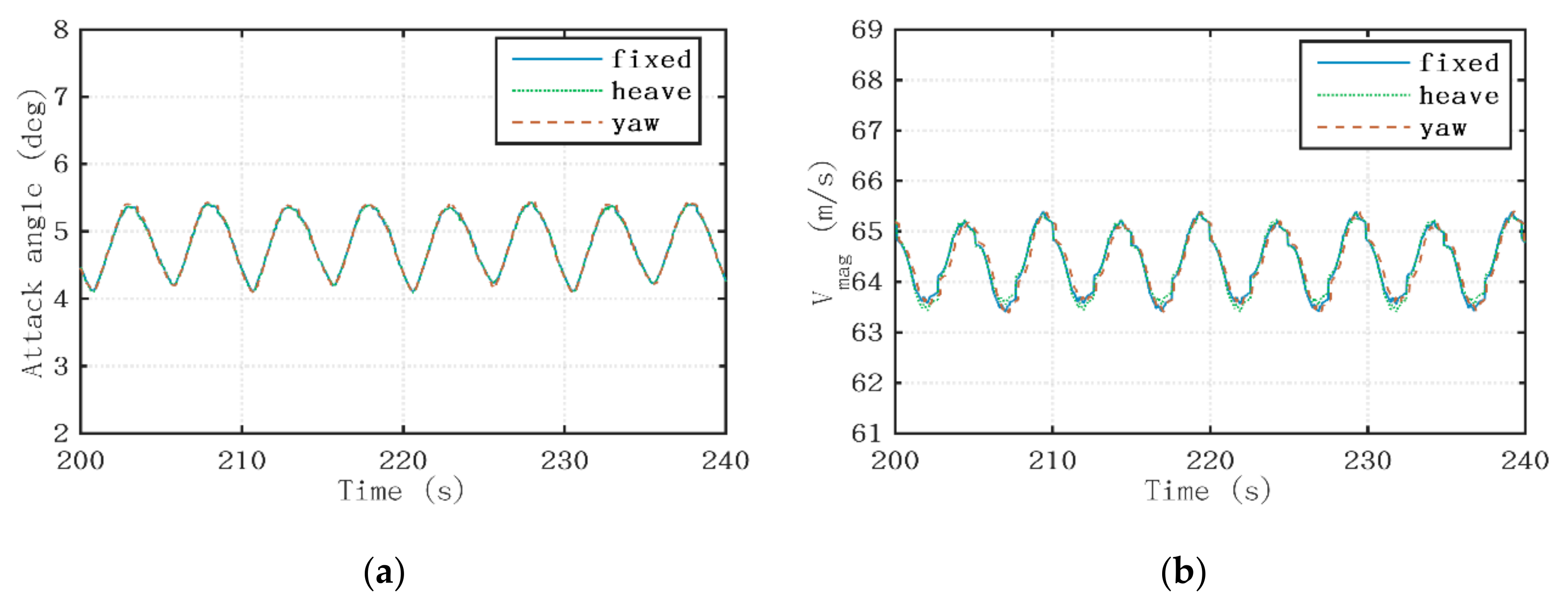
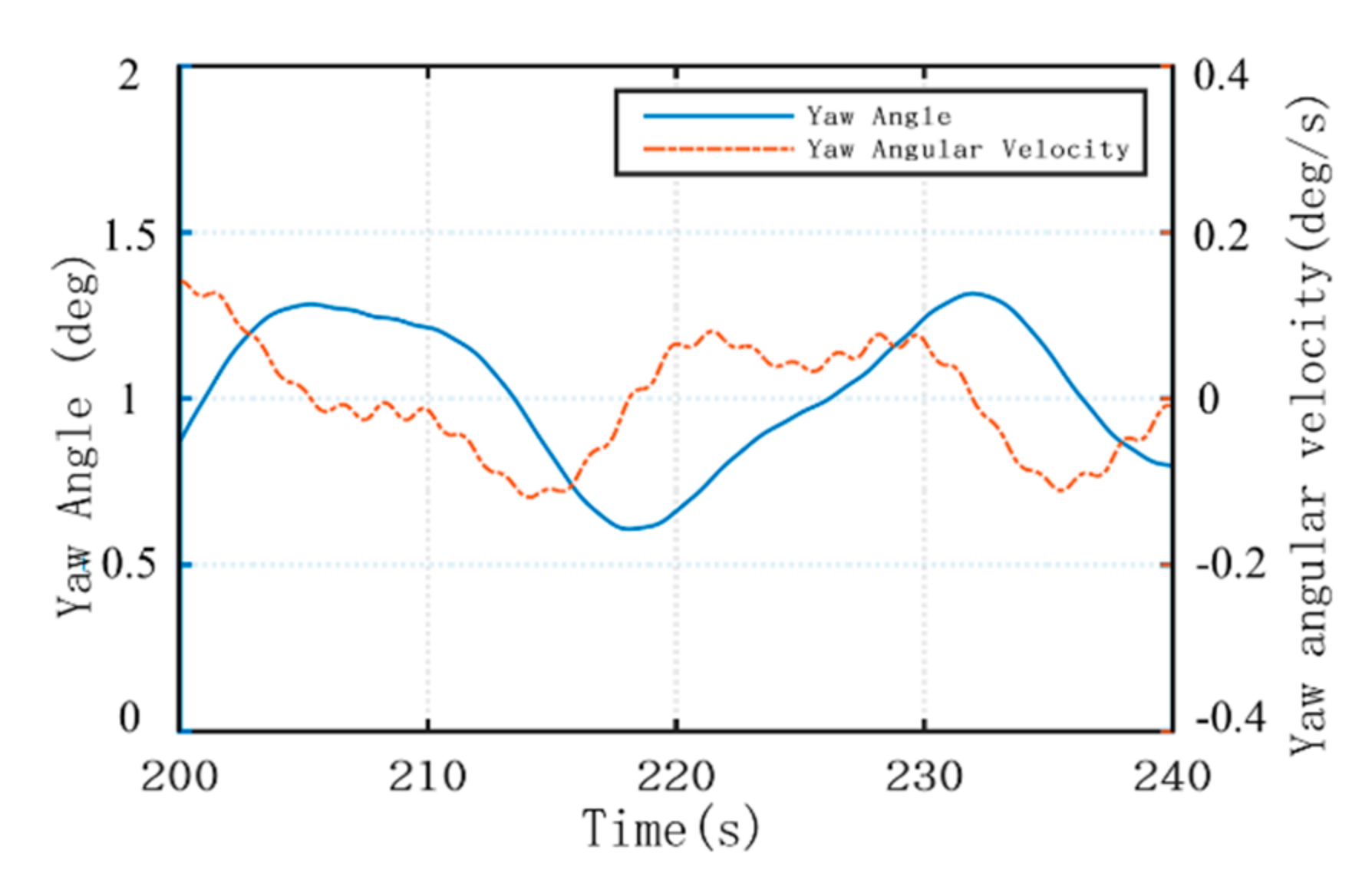
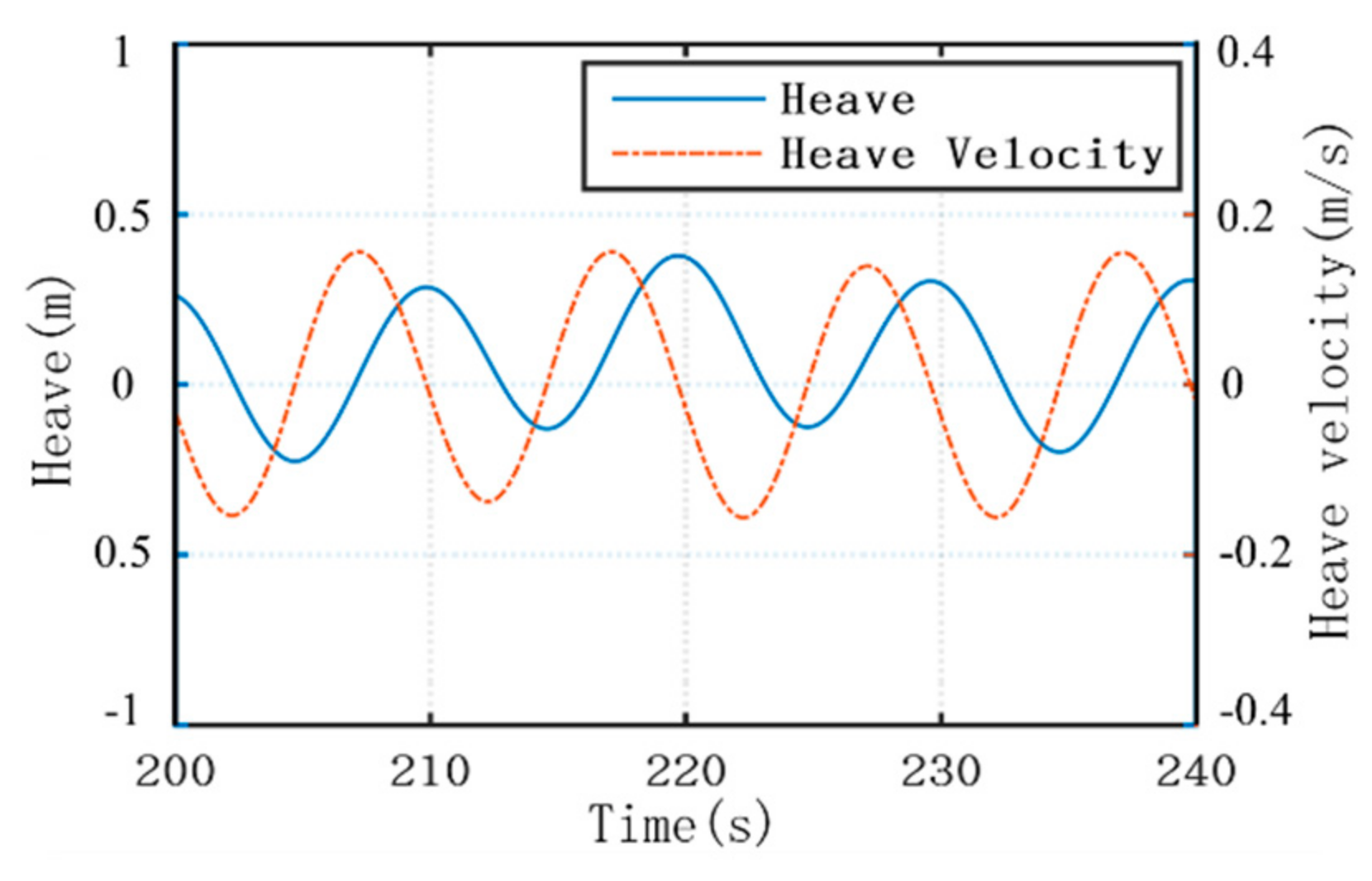
- The fluctuating range of the aerodynamic loads with platform pitching motion is almost five times that with platform surging motion under the same operating wind-wave condition. The platform yaw motion in collinear wind-wave environment is too small to have significant effects on the aerodynamic loads, and the influence of the platform heave motion can nearly be neglected.
- (3)
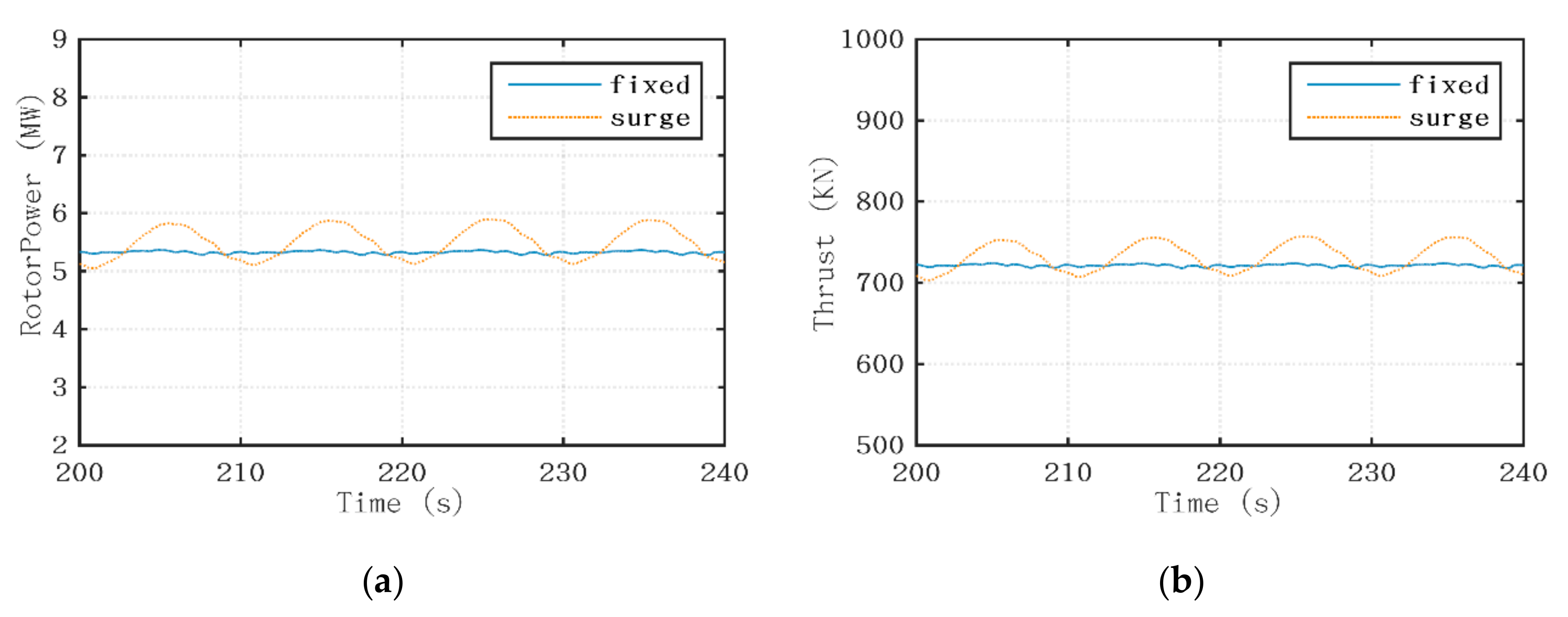
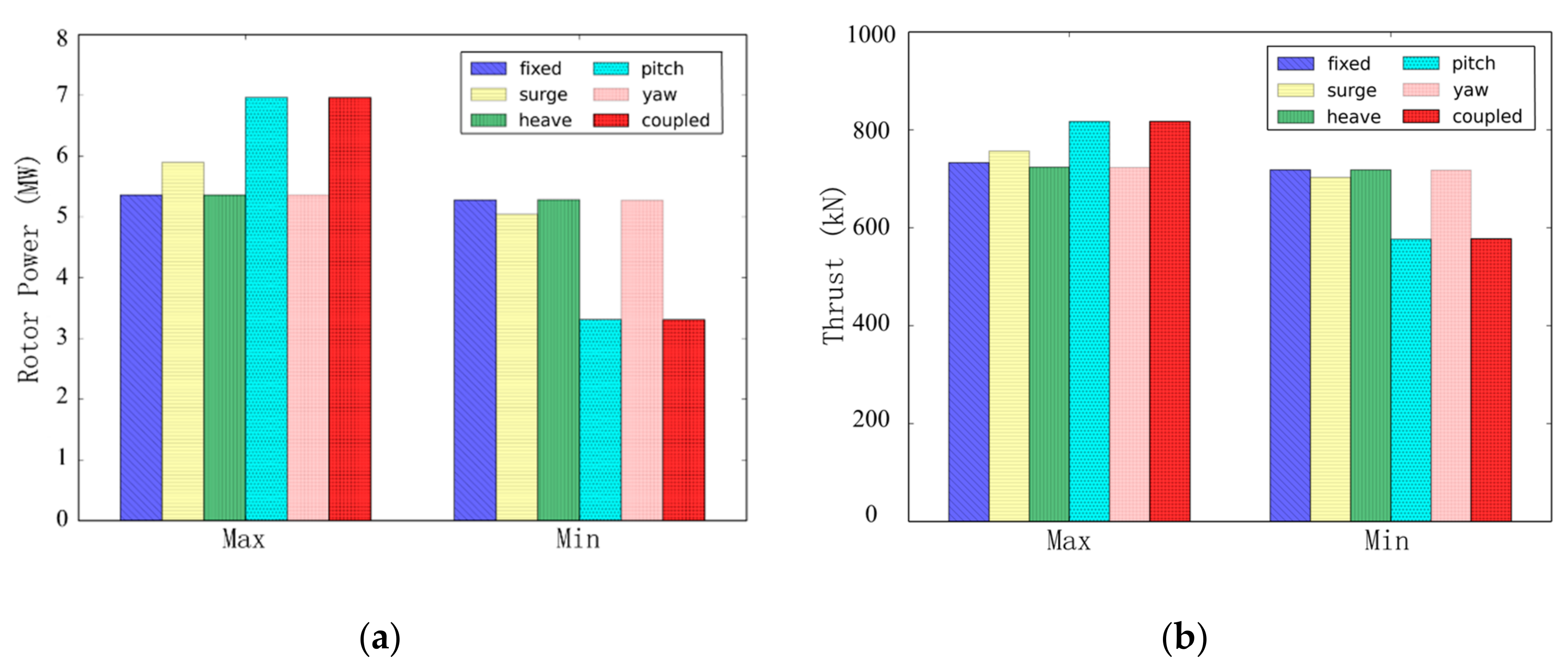
- Compared with the thrust, the rotor power is shown to be much more sensitive to the platform motions. The percentage of the variation amplitude with respect to the mean value of the rotor power is about two times that of the thrust. Moreover, the mean power output is reduced due to the large platform pitch angle when the shaft-tilt and the prone-cone angle are considered.
- (4)
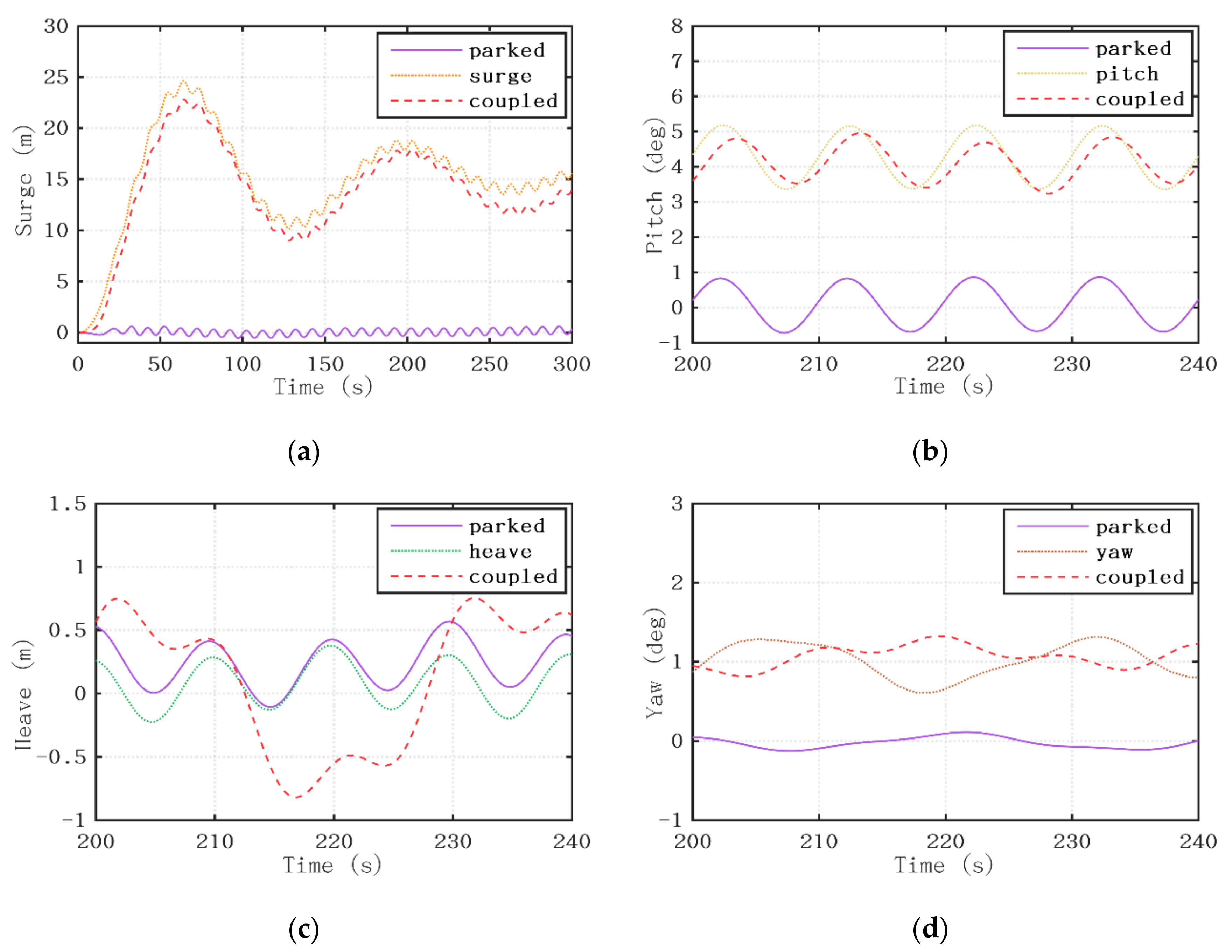
- Affected by the aerodynamic forces derived from the wind turbine, the mean surge displacement and average platform pitch angle both significantly increase. A small increase in the platform yaw motion is also found due to the increased yawing moment induced by the asymmetrical distribution of aerodynamic loads. The platform heave displacement decreases because of the vertical aerodynamic force component.
- (5)
- The motion responses of the FOWT with coupled platform motions are smaller than those with single DOF platform motion, except for the heave motion. The platform heave displacement in coupled condition is much larger than that with single DOF motion, resulting from the greater aerodynamic force component along the vertical direction. The coupling effects between the platform motions along different DOFs are obviously amplified by the aerodynamic loads.
- (6)
- The wake deflection phenomenon is clearly observed in the near wake region when platform pitch motion is considered. The dynamic pitch motion of the floating platform also contributes to the severe wake velocity deficit. Meanwhile, the periodical variation of the platform pitch angle enlarges the wake width and turbulence intensity. Other DOF platform motions including the surge, heave and yaw all have little influence on the wake flow.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sun, X.; Huang, D.; Wu, G. The current state of offshore wind energy technology development. Energy 2012, 41, 298–312. [Google Scholar] [CrossRef]
- Rodrigues, S.; Restrepo, C.; Kontos, E. Trends of offshore wind projects. Renew. Sustain. Energy Rev. 2015, 49, 1114–1135. [Google Scholar] [CrossRef]
- Schwanitz, V.J.; Wierling, A. Offshore wind investments—Realism about cost developments is necessary. Energy 2016, 106, 170–181. [Google Scholar] [CrossRef]
- Shen, X.; Chen, J.; Hu, P. Study of the unsteady aerodynamics of floating wind turbine. Energy 2018, 145, 793–809. [Google Scholar] [CrossRef]
- Hansen, M.O.L.; Sørensen, J.N.; Voutsinas, S. State of the art in wind turbine aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar] [CrossRef]
- Sebastian, T.; Lackner, M.A. Development of a free vortex wake method code for offshore floating wind turbines. Renew. Energy 2012, 46, 269–275. [Google Scholar] [CrossRef]
- Sebastian, T.; Lackner, M.A. Characterization of the unsteady aerodynamics of offshore floating wind turbines. Wind Energy 2013, 16, 339–352. [Google Scholar] [CrossRef]
- Wen, B.; Dong, X.; Tian, X.; Peng, Z.; Zhang, W. Influences of surge motion on the power and thrust characteristics of an offshore floating wind turbine. Energy 2017, 141, 2054–2068. [Google Scholar] [CrossRef]
- Wen, B.; Dong, X.; Tian, X.; Peng, Z.; Zhang, W. The power performance of an offshore floating wind turbine in platform pitching motion. Energy 2018, 154, 508–521. [Google Scholar] [CrossRef]
- Chen, C.H.; Yu, K. CFD simulations of wave–current-body interactions including green water and wet deck slamming. Comput. Fluids 2009, 38, 970–980. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H.; Song, J. Computational fluid dynamic analysis of a floating offshore wind turbine experiencing platform pitching motion. Energies 2014, 7, 5011–5026. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. The aerodynamic interference effects of a floating offshore wind turbine experiencing platform pitching and yawing motions. J. Mech. Sci. Technol. 2015, 29, 549–561. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. A CFD study into the influence of unsteady aerodynamic interference on wind turbine surge motion. Renew. Energy 2016, 90, 204–228. [Google Scholar] [CrossRef]
- Lei, H.; Zhou, D.; Lu, J. The impact of pitch motion of a platform on the aerodynamic performance of a floating vertical axis wind turbine. Energy 2017, 119, 369–383. [Google Scholar] [CrossRef]
- Liu, Y.; Xiao, Q.; Incecik, A. Investigation of the effects of platform motion on the aerodynamics of a floating offshore wind turbine. J. Hydrodyn. 2016, 28, 95–101. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Cheng, P.; Wan, D.; Xiao, Q. Numerical simulations of wake flows of floating offshore wind turbines by unsteady actuator line model. In Proceedings of the 9th International Workshop on Ship and Marine Hydrodynamics, Glasgow, UK, 26–28 August 2015. [Google Scholar]
- Ma, Y.; Hu, Z.Q.; Xiao, L.F. Wind-wave induced dynamic response analysis for motions and mooring loads of a spar-type offshore floating wind turbine. J. Hydrodyn. 2015, 26, 865–874. [Google Scholar] [CrossRef]
- Zhao, W.; Wan, D. Numerical study of interactions between phase II of OC4 wind turbine and its semi-submersible floating support system. J. Ocean Wind Energy 2015, 2, 45–53. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014; Available online: https://www.nrel.gov/docs/fy14osti/60601.pdf (accessed on 23 December 2019).
- Antonutti, R.; Peyrard, C.; Johanning, L.; Incecik, A.; Ingram, D. An investigation of the effects of wind-induced inclination on floating wind turbine dynamics: Heave plate excursion. Ocean Eng. 2014, 91, 208–217. [Google Scholar] [CrossRef] [Green Version]
- Antonutti, R.; Peyrard, C.; Johanning, L.; Incecik, A.; Ingram, D. The effects of wind-induced inclination on the dynamics of semi-submersible floating wind turbines in the time domain. Renew. Energy 2016, 88, 83–94. [Google Scholar] [CrossRef] [Green Version]
- Philippe, M.; Babarit, A.; Ferrant, P. Modes of response of an offshore wind turbine with directional wind and waves. Renew. Energy 2013, 49, 151–155. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Cheng, P.; Wan, D. Numerical Analysis of a Floating Offshore Wind Turbine by Coupled Aero-Hydrodynamic Simulation. J. Mar. Sci. Appl. 2019, 18, 82–92. [Google Scholar] [CrossRef]
- Quallen, S.; Xing, T.; Carrica, P.; Li, Y.; Xu, J. CFD simulation of a floating offshore wind turbine system using a quasi-static crowfoot mooring-line model. J. Ocean Wind Energy 2014, 1, 143–152. [Google Scholar]
- Jonkman, J.; Musial, W. Offshore Code Comparison Collaboration (oc3) for Iea Wind Task 23 Offshore Wind Technology and Deployment; Office of Scientific & Technical Information Technical Reports; National Renewable Energy Laboratory: Golden, CO, USA, 2010. [Google Scholar]
- Tran, T.T.; Kim, D.H. Fully coupled aero-hydrodynamic analysis of a semi-submersible FOWT using a dynamic fluid body interaction approach. Renew. Energy 2016, 92, 244–261. [Google Scholar] [CrossRef]
- Liu, Y.; Xiao, Q.; Incecik, A. Establishing a fully coupled CFD analysis tool for floating offshore wind turbines. Renew. Energy 2017, 112, 280–301. [Google Scholar] [CrossRef] [Green Version]
- Cheng, P.; Huang, Y.; Wan, D. A numerical model for fully coupled aero-hydrodynamic analysis of floating offshore wind turbine. Ocean Eng. 2019, 173, 183–196. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H. Rotor-floater-mooring coupled dynamic analysis of mono-column-TLP-type FOWT (Floating Offshore Wind Turbine). Ocean Syst. Eng. 2011, 1, 95–111. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H. Rotor-floater-tether coupled dynamics including second-order sum–frequency wave loads for a mono-column-TLP-type FOWT (floating offshore wind turbine). Ocean Eng. 2013, 61, 109–122. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H. The dynamic coupling effects of a MUFOWT (multiple unit floating offshore wind turbine) with partially broken blade. J. Ocean Wind Energy 2015, 2, 89–97. [Google Scholar] [CrossRef] [Green Version]
- Naqvi, S.K. Scale Model Experiments on Floating Offshore Wind Turbines. Master’s Thesis, Worcester Polytechnic Institute, Worcester, MA, USA, 2012. [Google Scholar]
- Huijs, F.; Ridder, E.J.; Savenije, F. Comparison of model tests and coupled simulations for a semi-submersible floating wind turbine. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Koo, B.J.; Goupee, A.J.; Kimball, R.W.; Lambrakos, K.F. Model tests for a floating wind turbine on three different floaters. J. Offshore Mech. Arct. Eng. 2014, 136, 020907. [Google Scholar] [CrossRef]
- Perez, L.R. Design, Testing and Validation of a Scale Model Semisubmersible Offshore Wind Turbine Under Regular/Irregular Waves and Wind Loads. Master’s Thesis, University of Strathclyde, Glasgow, UK, 2014. [Google Scholar]
- Sandner, F.; Amann, F.; Azcona, J. Model building and scaled testing of 5MW and 10MW semi-submersible floating wind turbines. In Proceedings of the EERA DeepWind 2015 Conference, Trondheim, Norway, 4–6 February 2015. [Google Scholar]
- Viselli, A.M.; Goupee, A.J.; Dagher, H.J. Model test of a 1: 8-scale floating wind turbine offshore in the gulf of maine. J. Offshore Mech. Arct. Eng. 2015, 137, 041901. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, F.G.; Hanson, T.D.; Skaare, B. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 671–679. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G. Importance of control strategies on fatigue life of floating wind turbines. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; pp. 493–500. [Google Scholar]
- Larsen, T.J.; Hanson, T.D. A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine. J. Phys. Conf. Ser. 2007, 75. [Google Scholar] [CrossRef]
- Jonkman, J. Influence of control on the pitch damping of a floating wind turbine. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Namik, H.; Stol, K. Individual blade pitch control of floating offshore wind turbines. Wind Energy 2010, 13, 74–85. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H.; Yu, Q.; Kim, K. Influence of control strategy to FOWT hull motions by aero-elastic-control-floater-mooring coupled dynamic analysis. In Proceedings of the Twenty-First International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Sørensen, J.N.; Shen, W.Z. Numerical modeling of wind turbine wakes. J. Fluids Eng. 2002, 124, 393–399. [Google Scholar] [CrossRef]
- Meng, H.; Lien, F.S.; Li, L. Elastic Actuator Line Modelling for Wake-Induced Fatigue Analysis of Horizontal Axis Wind Turbine Blade. Renew. Energy 2017, 116, 423–437. [Google Scholar] [CrossRef]
- Sørensen, J.N.; Shen, W.Z.; Munduate, X. Analysis of wake states by a full-field actuator disc model. Wind Energy 1998, 1, 73–88. [Google Scholar] [CrossRef]
- Shen, Z.R.; Cao, H.J.; Wan, D.C. Manual of CFD Solver for Ship and Ocean Engineering Flows: Naoe-FOAM-SJTU; Technical Report for Solver Manual; Shanghai Jiao Tong University: Shanghai, China, 2012. [Google Scholar]
- Cao, H.; Wang, X.; Liu, Y.; Wan, D. Numerical prediction of wave loading on a floating platform coupled with a mooring system. In Proceedings of the Twenty-third International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Cao, H.J.; Wan, D.C. Development of multidirectional nonlinear numerical wave tank by naoe-FOAM-SJTU solver. Int. J. Ocean Syst. Eng. 2014, 4, 49–56. [Google Scholar] [CrossRef]
- Shen, Z.R.; Ye, H.X.; Wan, D.C. Motion response and added resistance of ship in head waves based on RANS simulations. Chin. J. Hydrodyn. 2012, 27, 621–633. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of A 5-Mw Reference Wind Turbine for Offshore System Development; Office of Scientific & Technical Information Technical Reports; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Bazilevs, Y.; Hsu, M.C.; Akkerman, I.; Wright, K.; Takizawa, K.; Henicke, B.; Spielman, T.; Tezduyar, T.E. 3D simulation of wind turbine rotors at full scale. Part I: Geometry modeling and aerodynamics. Int. J. Numer. Methods Fluids 2011, 65, 207–235. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; USDOE Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2010. [Google Scholar]
- Han, Z.H.; Li, Y.; Ji, J. Numerical study on 3D steady flow of a 1.3 MW wind turbine considering wind shear factor. J. Chin. Soc. Power Eng. 2011, 31, 779–783. [Google Scholar]
- Dolan, D.S.; Lehn, P.W. Simulation model of wind turbine 3p torque oscillations due to wind shear and tower shadow. IEEE T. Energy Conver. 2006, 21, 717–724. [Google Scholar] [CrossRef]
- Spera, D.A. Wind Turbine Technology: Fundamental Concepts of Wind Turbine Engineering (Vol. 3); ASME Press: New York, NY, USA, 1994. [Google Scholar]
- Huang, Y.; Wan, D.; Hu, C. Coupled Aero-Hydrodynamic Analysis on a Floating Offshore Wind Turbine Under Extreme Sea Conditions. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Rating | 5 MW |
| Rotor orientation, Configuration | Upwind, 3 Blades |
| Rotor, Hub diameter | 126 m, 3 m |
| Hub height | 90 m |
| Cut-in, Rated, Cut-out wind Speed | 3 m/s, 11.4 m/s, 25 m/s |
| Cut-in, Rated Rotor speed | 6.9 rpm, 12.1 rpm |
| Overhang, Shaft-tilt, Pre-cone angle | 5 m, 5°, 2.5° |
| Item | Value |
|---|---|
| Depth to platform base below SWL (Total Draft) | 120 m |
| Elevation to platform top (Tower base) above SWL | 10 m |
| Depth to top of taper below SWL | 4 m |
| Depth to bottom of taper below SWL | 12 m |
| Platform diameter above/below taper | 6.5 m, 9.4 m |
| Item | Value |
|---|---|
| Number of mooring lines | 3 |
| Angle between adjacent lines | 120° |
| Depth to anchors below SWL (water depth) | 320 m |
| Depth to fairleads below SWL | 70.0 m |
| Radius to anchors from platform centerline | 853.87 m |
| Radius to fairleads from platform centerline | 5.2 m |
| Case Name | Platform Motion Mode | Wind Turbine State |
|---|---|---|
| fixed | fixed | Rotating |
| surge | surge | Rotating |
| heave | heave | Rotating |
| pitch | pitch | Rotating |
| yaw | yaw | Rotating |
| parked | surge, heave, pitch, yaw | Parked |
| coupled | surge, heave, pitch, yaw | Rotating |
| Grid | Total Grid Number (Million) | Rotor Power (MW) | Thrust (kN) |
|---|---|---|---|
| Coarse mesh | 1.33 | 5.73 (9.2%) | 747 (4.5%) |
| Medium mesh | 3.50 | 5.31 (1.3%) | 720 (0.4%) |
| Fine mesh | 9.70 | 5.24 (-) | 715 (-) |
| Cases | Rotor Power (MW) | Thrust (kN) | ||||||
|---|---|---|---|---|---|---|---|---|
| Max | Min | Mean | Amp. | Max | Min | Mean | Amp. | |
| fixed | 5.363 | 5.276 | 5.324 | 0.087 | 723.8 | 718.1 | 721.3 | 5.7 |
| surge | 5.896 | 5.045 | 5.491 | 0.851 | 756.9 | 703.2 | 731.8 | 53.7 |
| heave | 5.361 | 5.284 | 5.322 | 0.077 | 723.7 | 718.6 | 721.1 | 5.1 |
| pitch | 6.956 | 3.313 | 5.072 | 3.643 | 817.1 | 577.1 | 699.1 | 240 |
| yaw | 5.360 | 5.273 | 5.321 | 0.087 | 723.5 | 717.8 | 720.9 | 5.7 |
| coupled | 6.961 | 3.309 | 5.151 | 3.652 | 817.4 | 577.2 | 705.1 | 240.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Wan, D. Investigation of Interference Effects Between Wind Turbine and Spar-Type Floating Platform Under Combined Wind-Wave Excitation. Sustainability 2020, 12, 246. https://doi.org/10.3390/su12010246
Huang Y, Wan D. Investigation of Interference Effects Between Wind Turbine and Spar-Type Floating Platform Under Combined Wind-Wave Excitation. Sustainability. 2020; 12(1):246. https://doi.org/10.3390/su12010246
Chicago/Turabian StyleHuang, Yang, and Decheng Wan. 2020. "Investigation of Interference Effects Between Wind Turbine and Spar-Type Floating Platform Under Combined Wind-Wave Excitation" Sustainability 12, no. 1: 246. https://doi.org/10.3390/su12010246
APA StyleHuang, Y., & Wan, D. (2020). Investigation of Interference Effects Between Wind Turbine and Spar-Type Floating Platform Under Combined Wind-Wave Excitation. Sustainability, 12(1), 246. https://doi.org/10.3390/su12010246