1. Introduction
Anticipatory computing (AC) has become increasingly popular in technological applications and computer science. The development of AC can be dated back to 1985 and the work of Robert Rosen [
1]. Anticipatory system applications consist of sensors, human–computer interactions (HCI), artificial intelligence (AI), and content estimation [
2,
3,
4,
5,
6]. There are four major AC capabilities: sensing, context prediction, content estimation, and smart behavior [
7,
8,
9,
10]. The authors of [
10] proposed a machine learning approach for controlling the flow of products from their respective storage locations to the packing area in a retail distribution center.
Education is the most important factor in realizing sustainable life, through which people gain new knowledge and thrive in academic achievements. Education has led to the rapid global development of science and technology, the popularization of the internet, and the extensive application of robotics and AC. The authors of [
11] presented an innovative approach to promote AI in Education 4.0. The authors of [
12] studied an anticipatory agent based on the Anticipatory Learning Classifier System (ACS) for learning in changing environments. The authors of [
13] proposed a fast machine-learning-based reading algorithm to identify the important elements of a story that are handed down despite temporal and spatial differences. The authors of [
14] demonstrated that machine learning can be used as a tool to successfully conduct interdisciplinary education at the middle school level. The authors of [
15] proposed a small piece of a set of modern tools for informatics and electrical engineering education. The authors of [
16] presented impressive steps of the use of data analysis and prediction. The authors of [
17] showed the outcomes of a research and development project aimed at a setup for predictive learning analytics.
Robots are being used for education more frequently in recent years. In addition, robotics has moved toward universal education, such as robots for sign language counseling [
18] and robotics for kids [
19]. These are only parts of the ongoing research in recent years, but representing robotics research, invention, and application of technology in the scope of education. Robotics involves a wide range of knowledge, technology, and comprehensive aspects, thus resulting in a different robotics education. According to robot education experts’ research and practice, the applications of robot education can be divided into five types, which will be detailed in the following sections.
1.1. Robot Subject Instruction (RSI)
Robot Subject Instruction (RSI) refers to robotics as a science, at all levels of various types of education and specialized courses, so that all students generally grasp the basic knowledge of robotics and its related basic skills. The teaching objectives are as follows:
Knowledge goals: To understand the basic knowledge of robot software engineering, hardware structure, functions, and applications.
Skill goals: To be capable of robot programming and compilation, the assembly of a variety of robots with practical functions, the use and maintenance of robots and smart appliances, and the independent development of software-controlled robots.
Emotional goals: to cultivate an interest in AI technology, and to truly recognize the role of intelligent robots in social progress and economic development [
20]. Robot education has become part of the subject curriculum, especially for the teaching experience of primary and secondary school teachers, as well as their equipment, venues, and activity funding, and it thus presents great challenges.
1.2. Robot-Assisted Instruction (RAI)
Robot-Assisted Instruction (RAI) refers to robots as the main teaching media and tools for teaching and learning activities. Compared with the robot courses, robot-assisted teaching is characterized by the fact that it is not the main teaching tool, but rather, an auxiliary tool [
21]. It acts as a helper, a companion role that ordinary teaching aids cannot play, due to their lack of intelligence. Similar to RAI, an environment, or intelligent equipment, it plays a teaching are the concepts of Robot-Assisted Learning (RAL), Robot-Assisted Training (RAT), Robot-Assisted Education (RAE), and Robot-Based Education (RBE).
1.3. Robot-Managed Instruction (RMI)
Robot-Managed Instruction (RMI) refers to the role that is played by robots in the planning, organization, coordination, direction, and control of classroom teaching, educational affairs, finances, personnel, equipment, and other teaching management activities [
22]. Robot management is characterized by its automation and intelligence is related to its organizational forms, its organizational efficiency, etc. It fills a kind of auxiliary management function. Therefore, robot management teaching has become a welcome companion for many educators.
1.4. Robot-Represented Routine (RRR)
Robots have an analogous type of human wisdom, as well as a partly human function; thus, they can replace teachers and students in dealing with some things, other than classroom teaching [
18], such as the borrowing of books, note-taking, meals, playing games, etc. The purpose of using the agency functions of robots is to improve their learning-related functions and to promote the improvement of learning efficiency and quality.
1.5. Robot-Directed Instruction (RDI)
The highest level of robot application is in the field of education. At this level, the robot is, in many ways, no longer a supporting actor; instead, it becomes the master of the organization, implementation and management of teaching. Robotics is the object of our study. AI, combined with virtual reality technology, and multimedia technology, makes it a possible alternative for human teachers. It is extremely important to determine how it can become more in line with the development of education.
According to the five robot education classifications above, our system adopted the RAI method to assist the teacher in the classroom and to detect and identify the emotions of students. Our research adopts a big data emotional dataset (the Google facial expression comparison dataset), combined with the AI emotion software to design an emotion detection system. We aim to improve the learning environment of students by improving their interest, motivation and effective learning. Our system adopts the AI emotion software, which consists of foundational data such as 9 M + faces, 87 countries, 5.1 B facial frames and six years’ of video data, and it is described as follows: firstly, the facial features are detected, and secondly, emotion recognition adopts deep learning to identify human emotions. The emotion AI lists all the emotion scores, such as anger, contempt, disgust, fear, happiness, neutrality, sadness and surprise, and the highest score reflects the user’s emotions, as shown in
Figure 1.
Moreover, in recent years, many schools have adopted digital teaching platforms for curriculum assistance [
23]. The purpose is to use the curriculum to enable teachers and students to employ communication and information transmission outside the classroom, as well as to facilitate time-saving. However, there is still no effective way of improving the motivation of the class and the effectiveness of learning in the physical classroom unless the teacher’s classroom teaching method is interesting and attractive enough for the students to keep focused; if a teacher cannot do this, most students may feel that the class is boring, or they will not understand the purpose of learning, which will lead to low participation in the classroom and poor learning effectiveness.
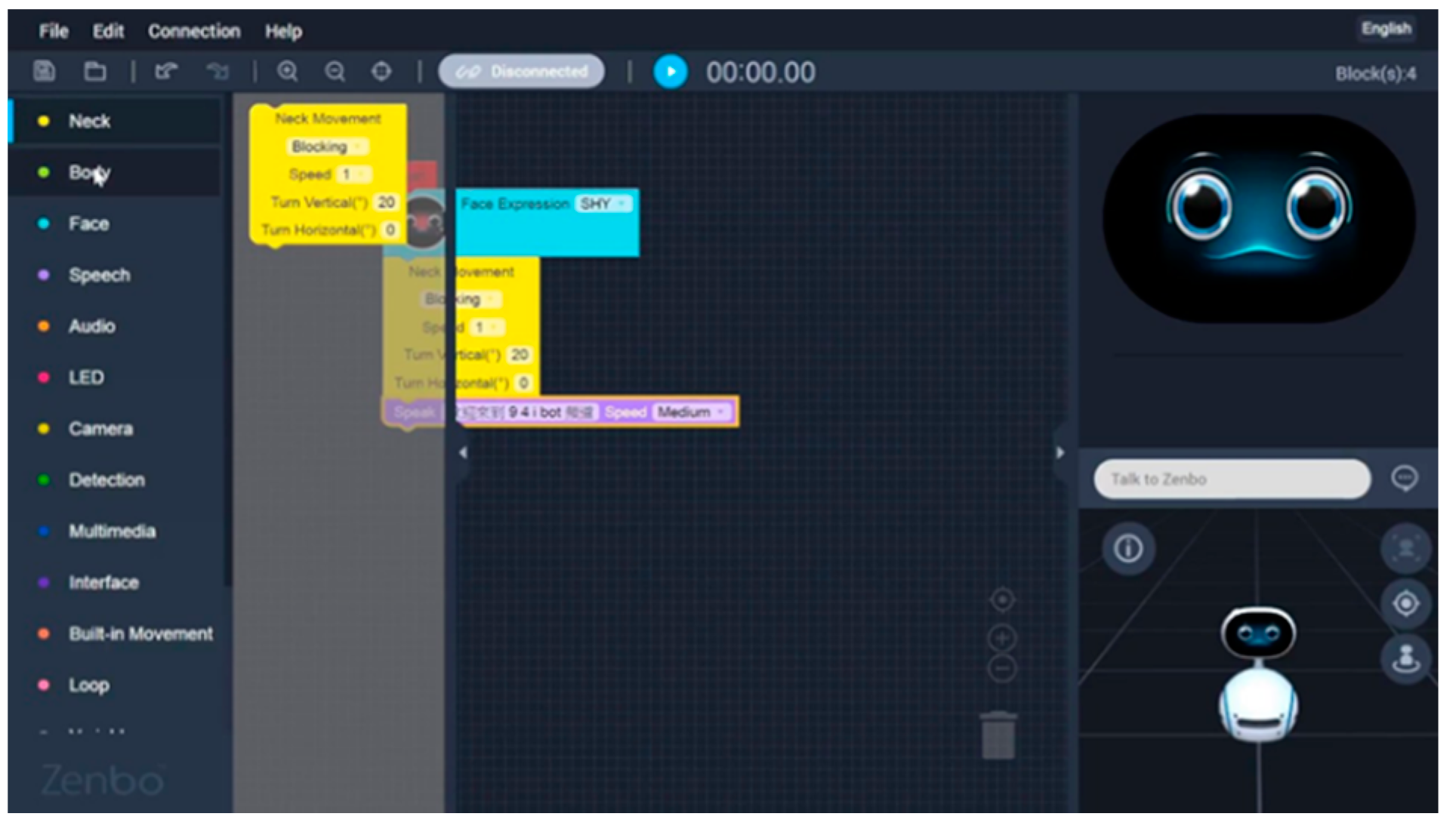
To promote the interaction of collaborative learning in the classroom and the adaptation and understanding of the classroom content, we intend to design a robot that can be used for teaching, and that can cooperate with the teachers in the classroom and interact with students, by using different pronunciations and intonations to assist them in their class learning [
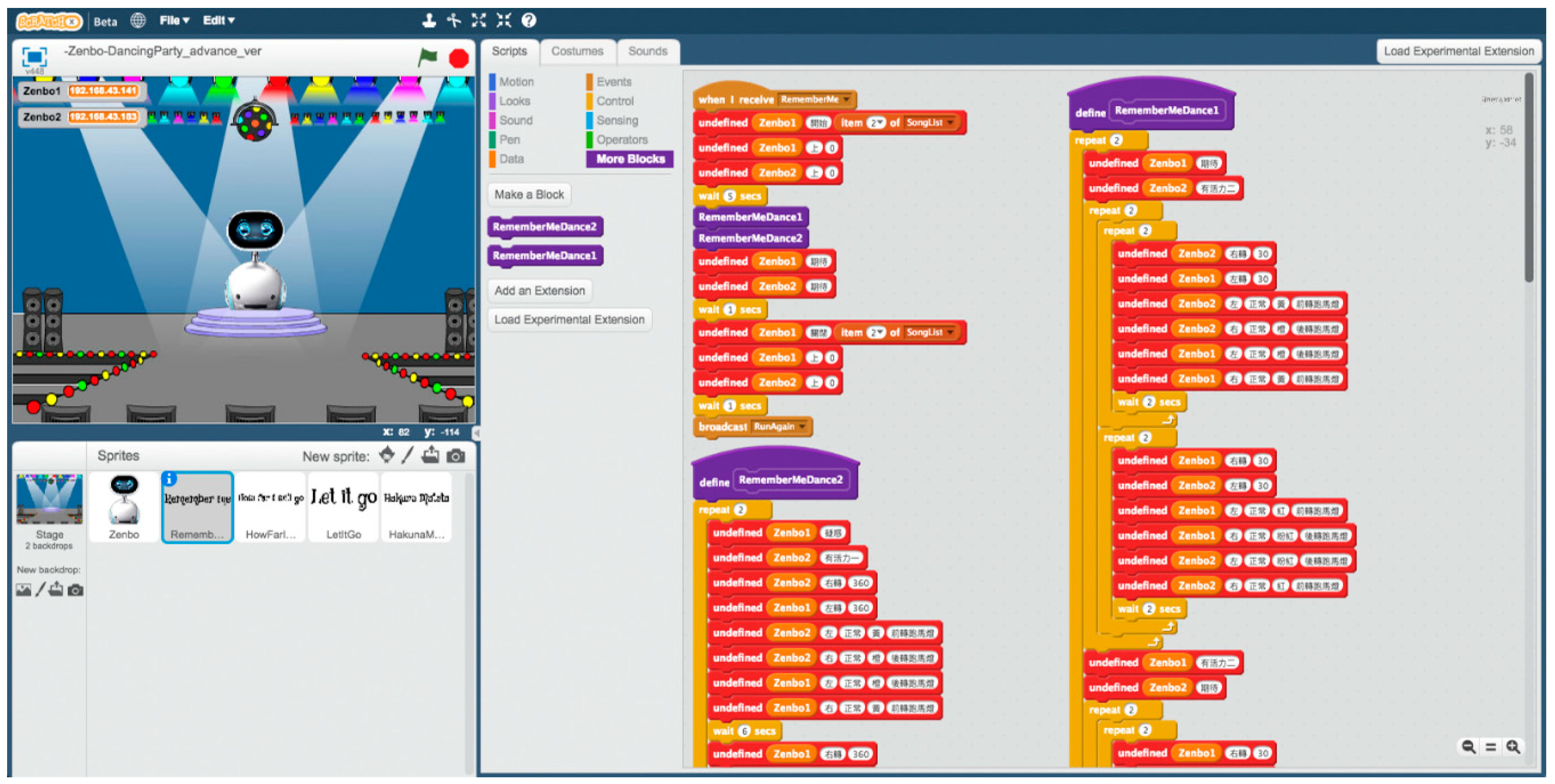
24]. The robot that we use is the ASUS Zenbo robot and Zenbo scratch programming (
Figure 2). Zenbo programming is scratch-based coding that is used for children and it is easy to program by graph block. The students can use Zenbo Scratch to code their own Zenbo interactive animations.
Figure 2 shows our interactive animated Zenbo scratch code. In this system, we also added the T&S (Teacher & Students) mobile platform and the ARCS teaching method that was proposed by Keller [
8]. The goal is for the robot to help both the teachers in the classroom or the students after class. Robots can be used to teach middle school students, where teachers can use them to organize their teaching courses and let students interact with them, to enhance their interest and willingness to learn mathematics. The final goal of our approach is for students to improve their motivation and learning outcomes. Our proposed digital learning system, which is based on emotion big data, can help the teacher to notice the student’s learning performance. Our work is significant in the following four ways: Firstly, according to big data feedback, our system can improve the performance of both the teachers and the students. Secondly, according to the feedback of students and the big data, the teacher can analyze each student’s learning statement. Thirdly, teachers are able to track the students’ learning patterns. Finally, our system can retrieve better insights from the big data learning process. Our system adopts Emotion AI as a feedback tool to detect the students’ facial expressions, and it records the students’ facial expressions, as well as their learning features data. If we can collect more and more data on learning features, this could improve the educator’s teaching model, and we could predict the students’ learning performance, using machine learning or the deep learning tool.
2. Related Work
In the past few years, much research has focused on collaborative e-learning, as it has become an important cornerstone of the e-learning system. The digital learning platform enables students to study together, regardless of their geographic location or time limits [
25,
26]. These educational environments are designed and committed to encouraging both personal and group work in all areas of teaching, as well as to make collaborative learning more efficient, while modern learning has also begun to use AI as a suitable solution. There are currently quite a few collaborative learning systems that are used to solve problems; for example, in English teaching in primary schools, in high school vocational courses, and even in the execution of business operations [
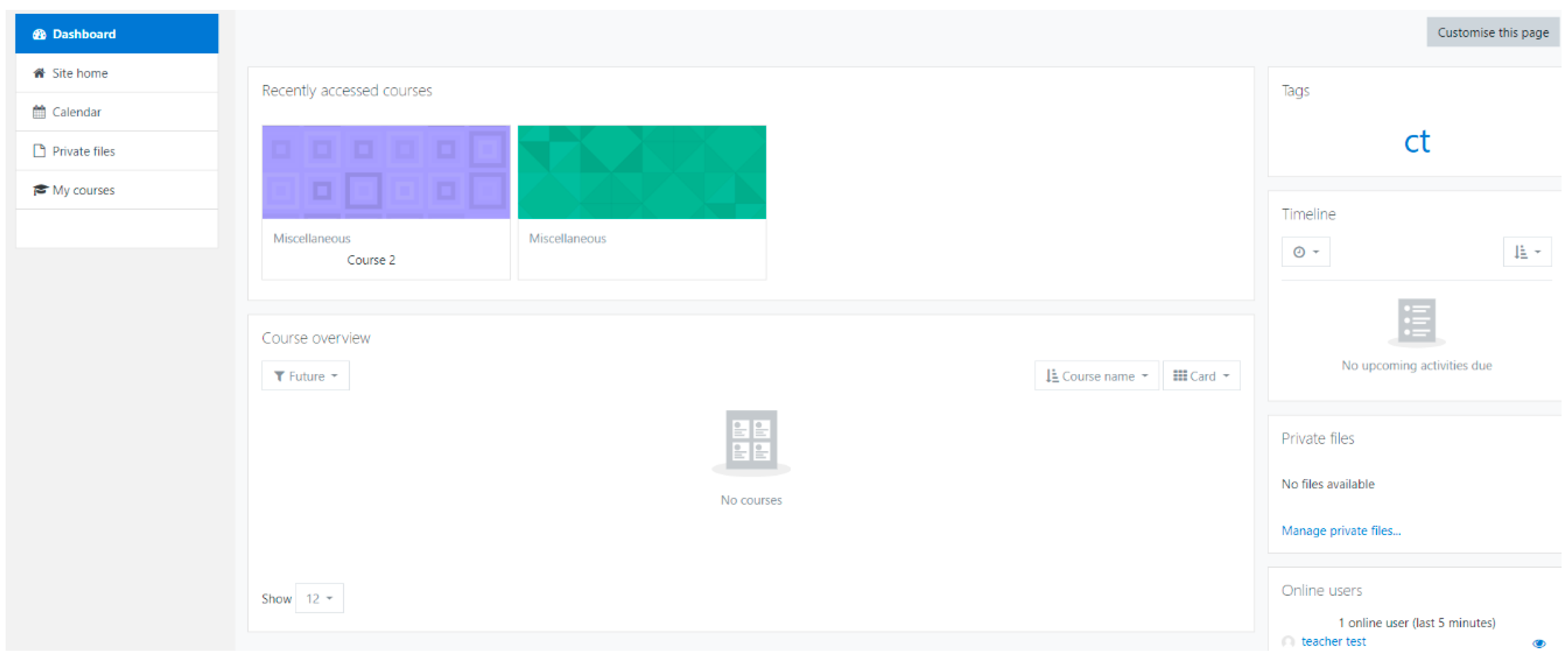
27]. However, most of these studies focus on electronic collaborative learning platforms in order to make them a conduit for users to learn online, to have discussions with each other and to access new knowledge. Today, there are already well-functioning and user-friendly digital learning management systems, such as Moodle, Edmodo and Blackboard, and Massively Open Online Courses (MOOCs) [
26] (see
Figure 3).
A robot is used by the Aichi Nagoya University School of Engineering in Japan as a classroom teaching aid [
24]. It uses the voice of the robot, intonation and facial expression changes to assist students and teachers with classroom interaction. This will change the traditional model of the classroom that has always been led by teachers in the past; instead, the robot will help the teacher to teach and the students to learn in the classroom. Robots are also used to assist pupils with their language exercises [
28]. These cases have been statistically analyzed, and the results have proven that such practices can attract the attention of the students and improve their attitudes towards learning. The big data is integrated into the human context in many applications on the internet. Lytras et al. [
29] analyzed the main aspects of big data and data analytics research, and provided metaphors for the future. Drawing from the detailed big data analysis of the outcomes of an international pilot study [
30], they show-cased even the most educated users of smart city services. The multimodal emotion analysis is a very popular research topic that is based on big data methods, semantic rules and machine learning, by using different techniques [
31].
Currently, there are convenient online platforms that help students to learn after class. However, if classroom teaching involves robot participation, which is our plan, it would change the status of teachers and students in the classroom, and it would increase the students’ sense of fun in the classroom as well as a feeling of novelty. We look forward to using robots to increase classroom participation, to assist teachers in helping students to answer questions, to solve problems in the class, and to enhance learning motivation and effectiveness. Therefore, based on the digital teaching platform that can be used for learning and having discussions with, and among, students outside the classroom, and with the help of classroom-assisted robots, we aim to combine the two, in order to create a better way for students to enhance their willingness to learn and to improve their learning outcomes.
3. The Research Methods
The goal of this research is to apply anticipatory computing to robots, based on AI, to improve children’s learning by increasing their motivation in the classroom. Robots will become teachers’ assistants and help them to teach in the classroom. The integration of robots in the classroom can provide interactive teaching, with the teachers asking questions, discussing problems and helping students to find answers to their problems, stimulating the students’ enthusiasm and motivation for learning, improving the long-standing teacher-oriented teaching with passive students in the past, and developing the their high-level thinking skills. With the help of robots, teachers can use the class time to teach more effectively. Students can also improve the ways and attitudes toward self-learning because of changes in teaching methods, namely, the interaction between people and robots [
3], thereby improving the learning outcomes and having a positive impact on future education and research.
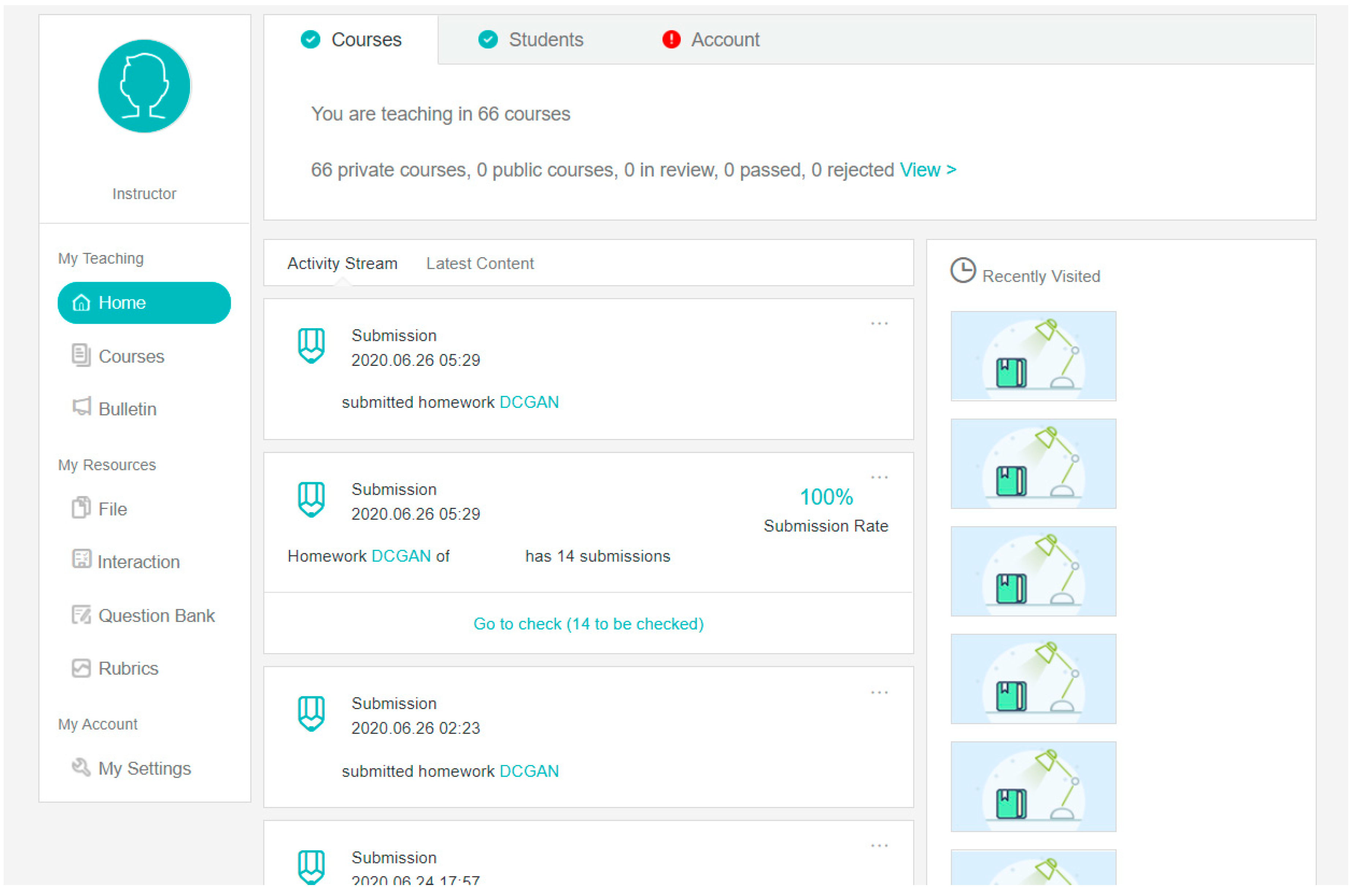
4. A Mobile Network Exchange Platform
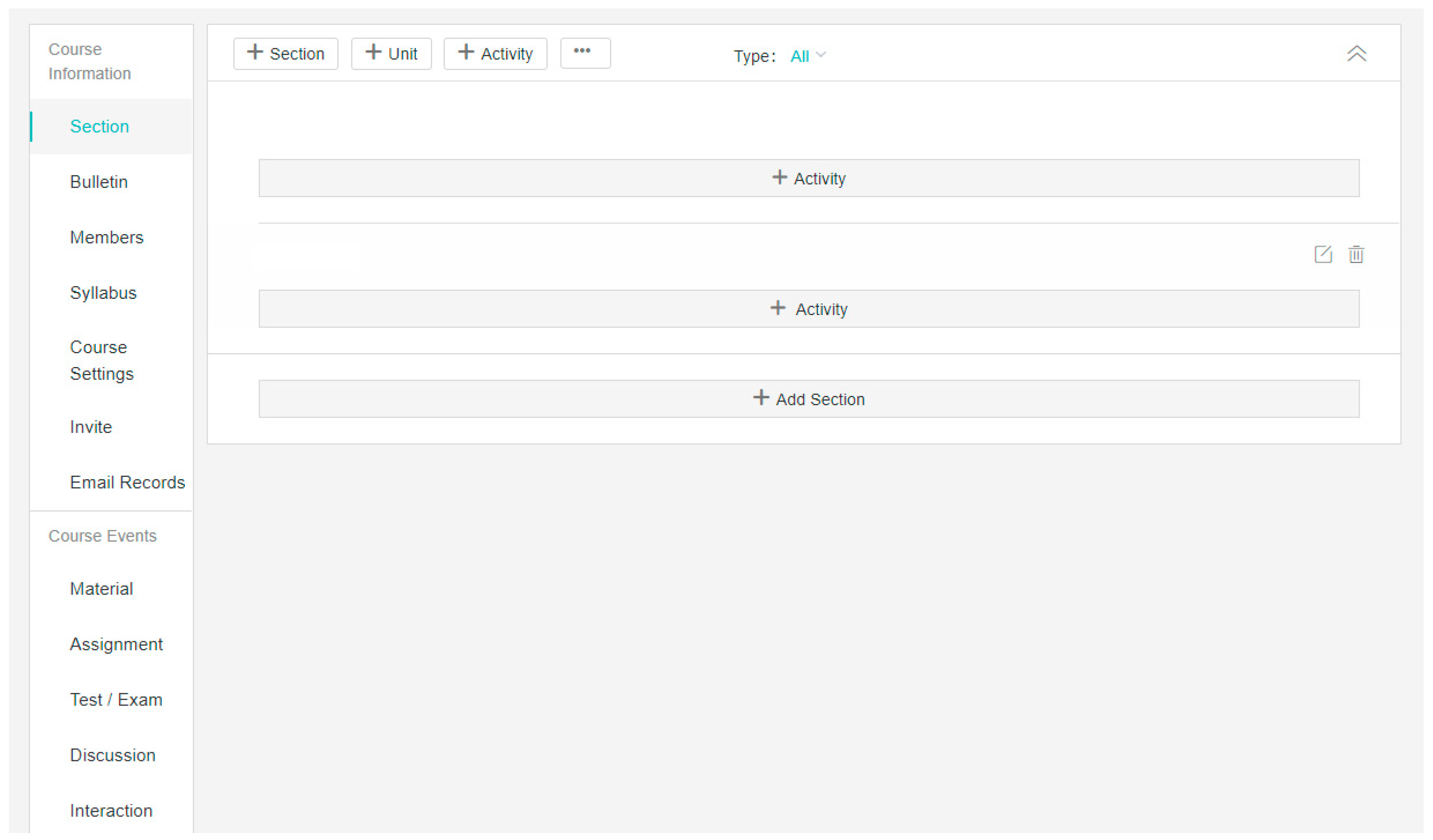
Because of the widespread and developed network today and the increasing number of people who have one or more smartphones, we use the T&S mobile platform as a communication platform for teachers and students to publish messages, discuss courses, communicate, interact with robots, and more. We use the network platform, called Tronclass, which also has an app to provide users with more convenient learning resources and the environment. The functions of the platform are also quite complete, including important learning indicators, such as fragmented, autonomous, guided and systematic learning (
Figure 4). It not only helps teachers to understand student’s learning process, but also for teachers and students to use an online communication channel, to view the class content online (
Figure 5 and
Figure 6), to view student and teacher online interaction and feedback, to release messages, etc. The interface is quite simple, easy to understand and use, which can help teachers to understand the classroom situation and to save time, and it is also coupled with online learning, discussions, a test question bank, and other ways of helping students practice and learn. At present, quite a few domestic universities have adopted this system, in order to save teachers more time for other teaching tasks. Because our research focuses on the design of interactive robots, teachers must spend much more effort on class design and interaction in the teaching of robotics, while using the platform can save teachers time in the program.
5. Designing an Interactive Teaching Robot
The robot design and hardware equipment that we use is the ASUS Zenbo. For the software design, the method proposed by the Nagoya University Institute of Engineering [
24] is used. The method proposed in the interactive teaching of the robot, the expression of the transformation, as well as the voice intonation and wording usage, can effectively enhance the learning attention, willingness and interaction of students, thereby achieving good results. We have specifically compiled easy-to-learn software into the robot, for example, “scratch” (
Figure 7).
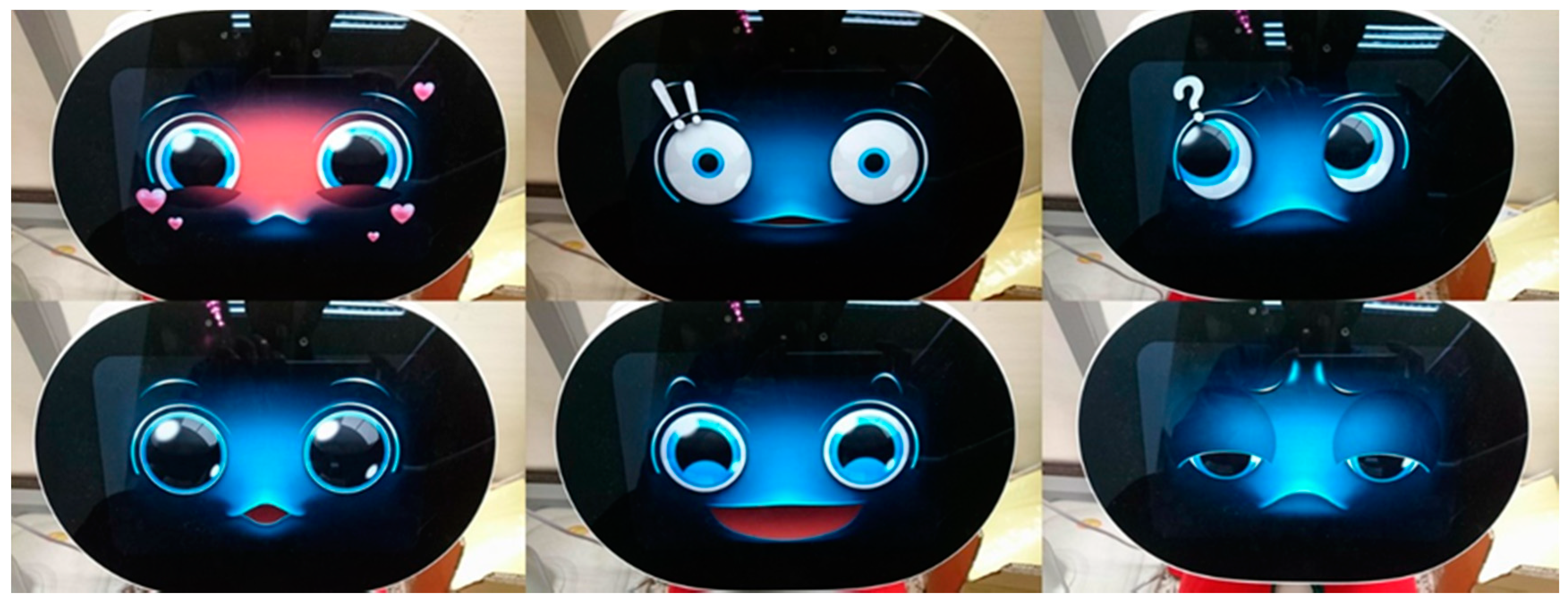
Along with a speech recognition system, which it can be easily, quickly and effectively understood and used, the robot also has networking capabilities. In other words, it can act as a mobile computer that responds and accesses the Internet by voice or by issuing programmatic instructions, so that teachers do not feel overly confused by their use. Therefore, Zenbo focuses on the expression, tone and vocabulary of the interaction between the teachers and students. Zenbo gives a happy expression and a pleasant tone when students answer the questions, and there are soothing expressions and encouraging words when students do not know the answers; in this way, Zenbo can communicate more like an average person, so that the interaction between teachers and students can be improved, which attracts the students’ attention and increases their classroom participation (
Figure 8).
The design interacts with the teaching in the classroom, and the teacher’s questions and answers during the class help the students to better understand what is going on. It can also be designed to deliberately offer the wrong answer, to allow the student to correct it, and to confirm whether the student has understood the classroom content. When the teacher asks questions, the robot can also give the students reminders, give directions or prompt the students to find the answers. After school, robots can also be used by students to practice in the test bank. When you answer correctly, it gives praise via the table line and sound. When you answer incorrectly, it encourages you and gives some tips to help you solve the problem. If you keep making mistakes, the robot makes a joke. By using this approach, students can do more after-school exercises to enhance the effectiveness of their learning, as the robotic responses attract students and enhance their learning; even students with Tourette Syndrome can experience a happy and comfortable learning environment. Therefore, the focus of this research is the interactions of teachers, students, and robots in the classroom, which will also play an important part in improving the students’ motivation and learning outcomes.
6. Robot for Teaching Design
In terms of the teaching method design, we focus on the interactions of teachers, students, and robots. Because of the pressure of the learning environment, students are less likely to take the initiative to ask questions during classroom instruction, even if the teacher wants to know if the students understand. Therefore, when the teacher explains a new theory or problem-solving method, the robot can ask the teacher questions on time, and the teacher responds to the robot’s problem, in order to achieve interaction and enable the students to understand the problem. The teacher also finds some students in the classroom to answer the questions. Most of the students may be confused because they do not know the answer. At this time, the robot gives some tips and helps the students to answer the questions. Of course, all the questions and answers in the classroom must be designed by the teacher and asked by the robot, in order to elicit answers. The class adopts the ARCS motivation model, so that students can clearly understand the problem, find the answers, analyze the results and apply them in the various fields during their study. Finally, this method can be used to train the high-level thinking skills of students, so that they can begin to think independently and find the answers, instead of being provided directly with the answers.
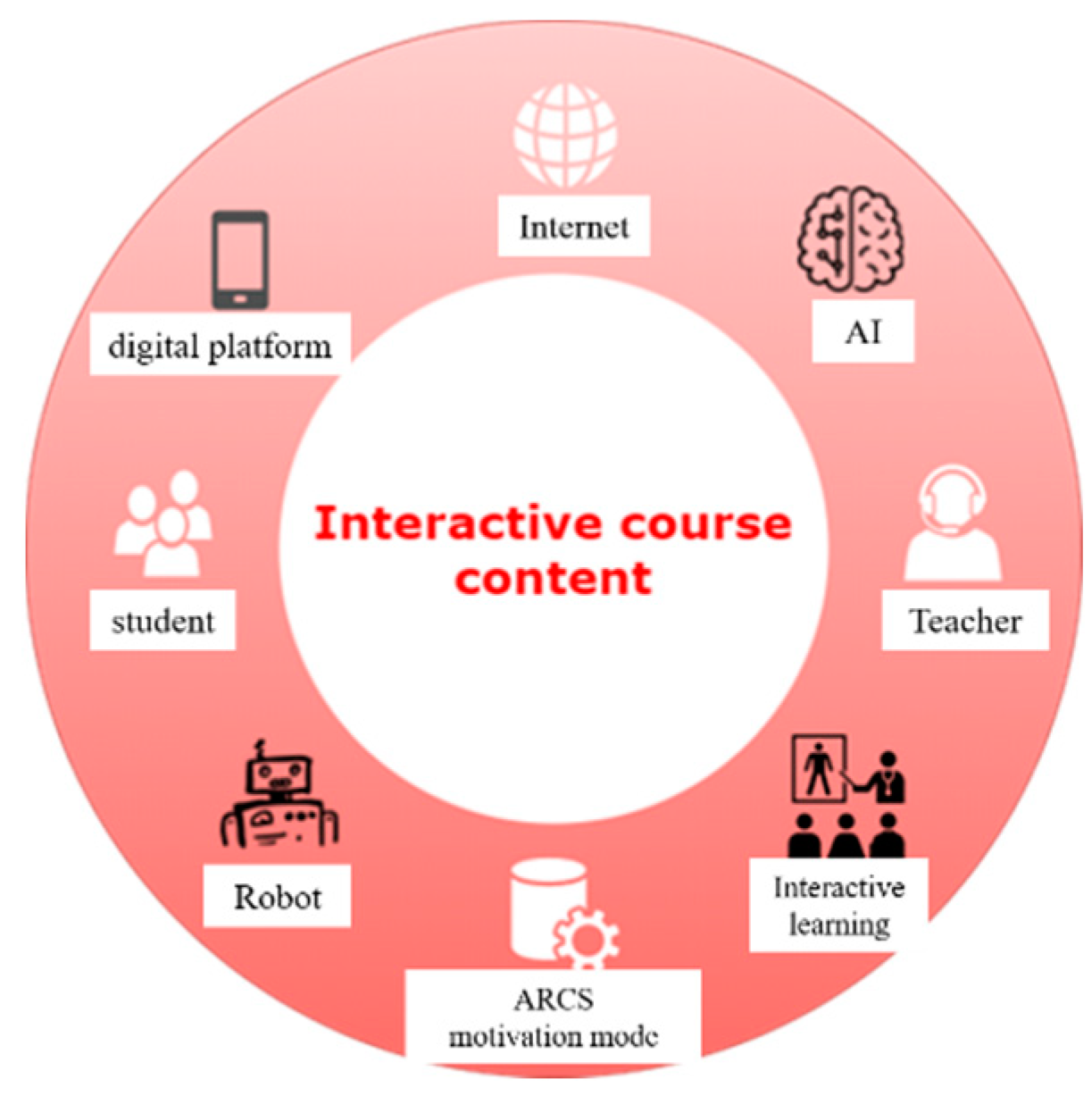
Finally, with the method that we have designed, combined with the system of teachers, students, robots and digital platforms (refer to
Figure 9), the students’ motivation and effectiveness in learning should be improved, so that they are able to solve the above-mentioned educational problems.
Introducing the function of each part of this system:
Network: With today’s academic collaborative learning, which emphasizes the system’s convenience and the current high coverage of wireless networks in Taiwan, the Internet uses Wi-Fi as a medium for data transmission and reception.
Digital platform: The Tronclass service is used as an interactive platform for teachers and students, both in- and outside the classroom.
ARCS Motivation mode: During the course, attention, relevance, confidence, and satisfaction serve as a benchmark for the evaluation of the measures that aim to cultivate the high-level thinking ability of students, and to enhance their learning motivation.
Robot: The use of robots to assist teachers in classroom teaching and presentation is done through dialogue and interaction, which adds to the classroom fun and enhances the will to learn.
Interactive teaching: In class, teachers, students, robots and interactive teaching methods are used to increase the students’ participation in the classroom [
22].
AC based on AI: The AI set for the robot, namely, the emotion AI that detects the students’ emotions, enables corresponding interactions and responses, with interactive ways of asking questions and helping students to discuss the problem and find the answers in the classroom. Our system, using emotion AI, is the human emotion detection method that is based on a standard webcam on a robot. The emotion AI first detects human faces from images. The deep-learning algorithms (such as the Convolutional Neural Network, CNN) are adopted, to analyze the facial expressions. The emotion AI is trained by six million faces and the deep-learning method can achieve high performance and accuracy.
7. Planning to Enhance Learning Motivation and Effectiveness
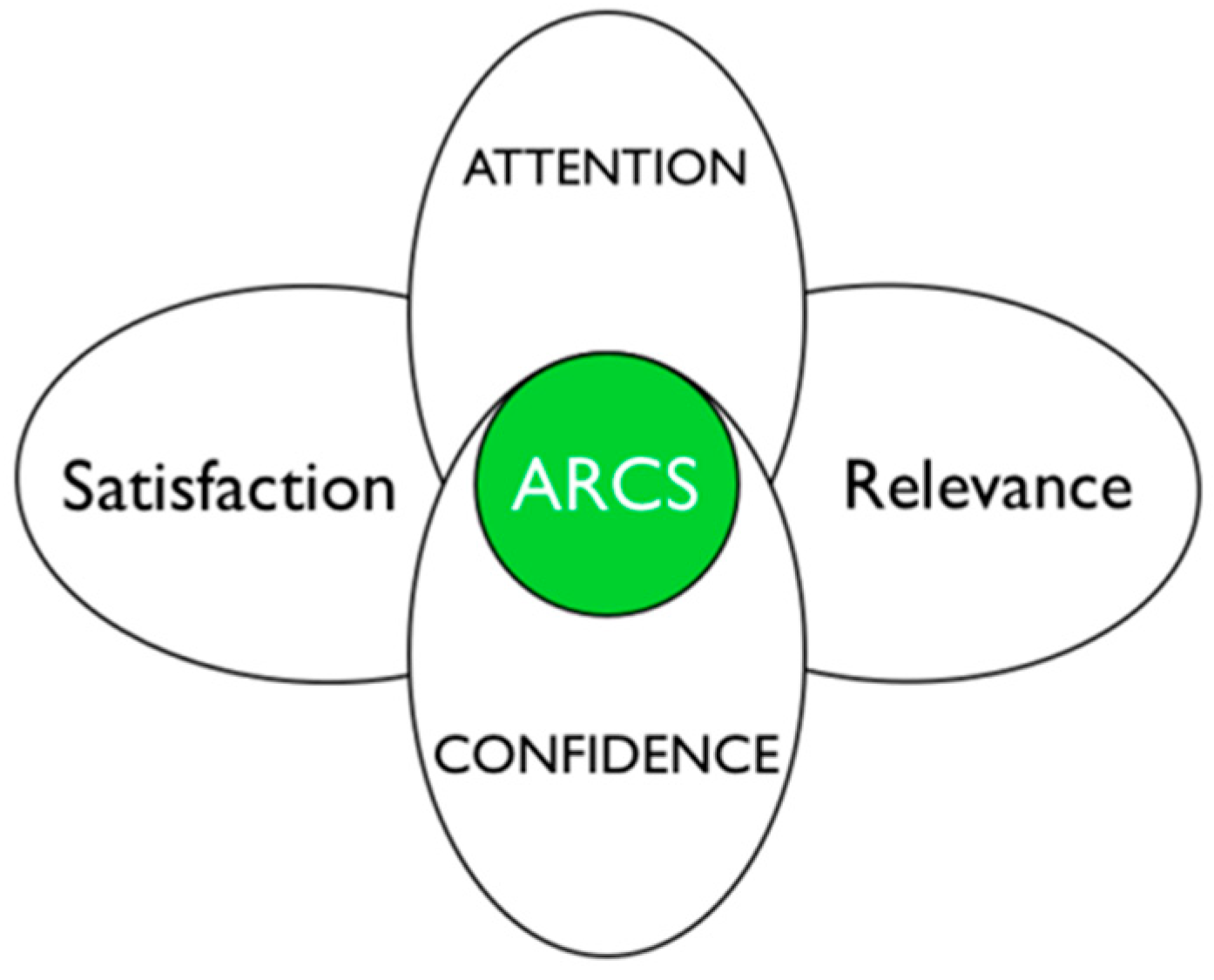
We use the ARCS Motivation Model proposed by Keller (
Figure 10) [
28] to improve the motivation and effectiveness of students. The method emphasizes that learners must be motivated by four elements to stimulate their learning motivation. It suggests that the systematic teaching design must be strengthened and that students must be encouraged to participate and interact with each other, while providing the theory and practical application [
8], combined with a variety of techniques to assist with their learning, as well as to solve incoherent learning and knowledge conflicts.
8. ARCS Mode Features
Attention to motivation and feelings of affection.
It can complement other theories of teaching design steps, by combining them.
It not only focuses on improving teaching effectiveness, but it also pays special attention to learning interest, through a series of strategies, to enhance the interest of learners and to achieve learning effectiveness.
According to ARCS motivation (
Figure 9) to achieve learning outcomes [
25], this method combines current theories of learning motivation, such as the cognitive, humanistic, social learning and behavioral theories, etc. (
Table 1), by analyzing and summarizing new explanations. This motivation model, combined with various perspectives of the motivation theory, can provide teachers with the appropriate teaching strategies.
It can be seen from the above that planning and design of the ARCS model uses a series of strategies to enhance the interest of learners, and to promote their learning effectiveness. Therefore, we divide the robot into the four elements (ARCS), as discussed below:
Attention: In order to attract the interest of the students, as well as to stimulate their curiosity, we put the teaching robot, Zenbo, in the classroom, with its rich expression and self-introducing voice and timely questions, to attract the students. Another important point is the provision of change, in order to stimulate the students’ need for knowledge. In class, Zenbo helps students to answer questions and encourages them to be more confident and courageous, by asking and answering questions in the classroom.
Relevance: Personal relevance is established. Although attention and curiosity are necessary, they cannot be sufficient learning conditions; students need to be aware of the need to pursue their goals, to develop a learning style, and to connect them with their past learning experiences. In class, the program’s curriculum is based on the middle school basic mathematics for teaching; we use Zenbo to play videos and communicate with students, so that they can identify whether they are interested in learning about math, and how they relate to what is going on in their lives, and how to achieve a clearer learning motivation.
Confidence: A clear learning goal builds confidence. In order to build the students’ confidence in learning, the teachers arrange online tests, most of which are not too difficult, but very close to current events or topics related to the students, and Zenbo helps them to solve problems. When the students are successful in a problem-solving session, they could understand how a problem is solved and how it can prove to be useful in the real world, so that their confidence in learning is increased, they become more motivated, and have a sense of belonging.
Satisfaction: In order for students to actively engage in the learning experience, to feel satisfied and to apply what they have learned, we use the test method. The content, as well as the problem-solving skills and the methods used, are all offered in class. It is not difficult for students to answer the questions, nor is it difficult to encourage them to learn and get a good score, and to feel satisfied. Not only can it be used in real-life situations, but students also become proud and satisfied with their learning outcomes during the semester, as they finally achieve a sense of self-satisfaction and their learning is effectively enhanced.
The following corresponding strategy shown in
Table 2 lists the use of the elements of ARCS motivation:
9. Experiment Method
The research method was conducted by the “teacher, who is the researcher” and who carried out the ongoing research experiment. The Tronclass learning platform and the teaching robot are used as classroom aids to confirm whether the students’ motivation and learning effectiveness can be improved in the teaching of sustainable learning. Our proposed robot-assisted instruction learning system adopted AI to recognize the students’ emotions when they are learning. The assisted learning system is based on AI.
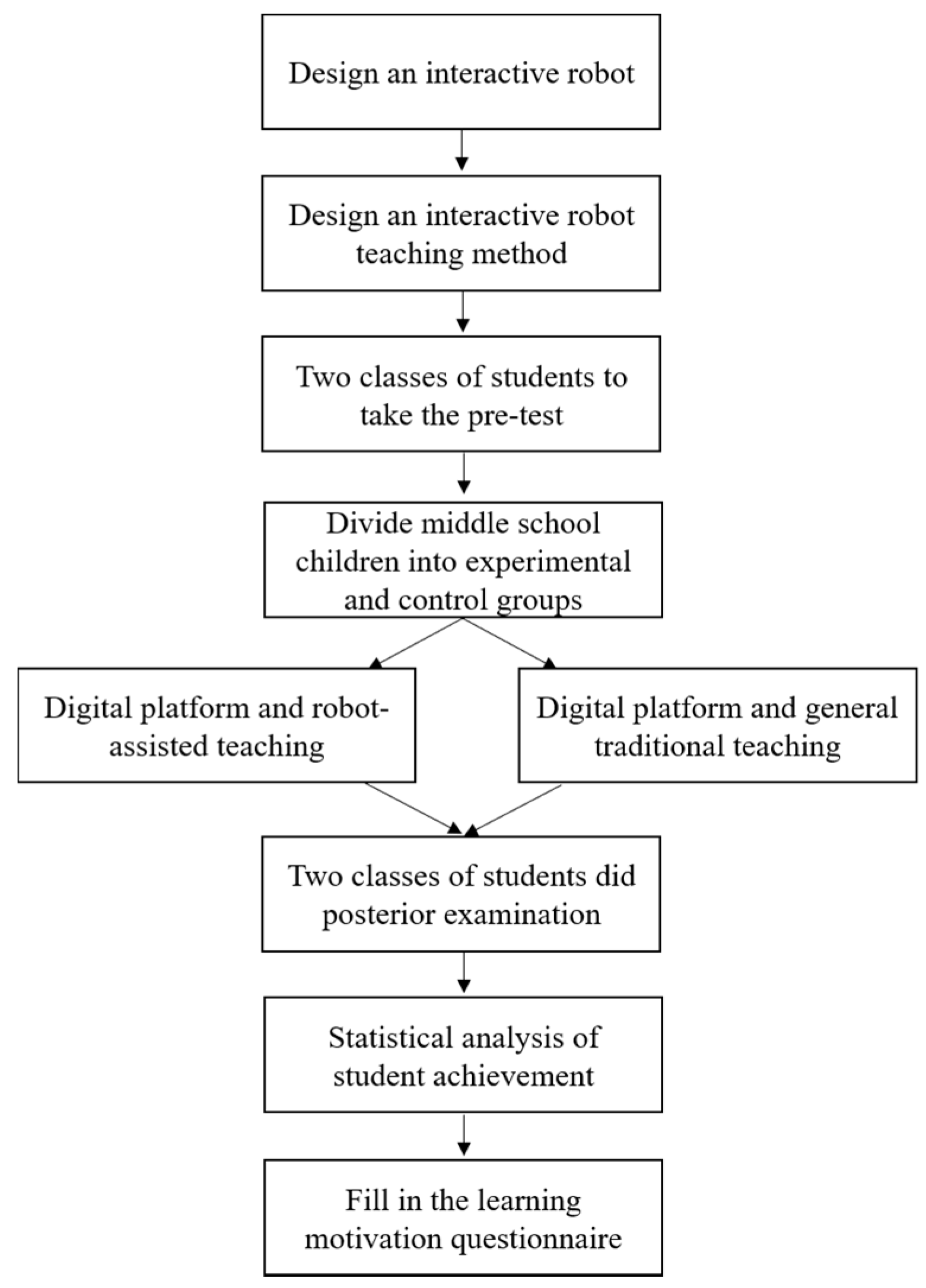
The class is divided into two classes, namely, Class A, the experimental group, and Class B, the control group (
Table 3), to compare the effectiveness of the two classes and to confirm whether robot-assisted teaching can enhance the students’ willingness to learn and achieve.
The experimental group is a class that implements digital platform and robot teaching. The control group teaches traditionally, without robot-assisted instruction. In order to get the most objective and accurate results, both classes must pass the pre-test, in order to confirm that the scores do not differ greatly. The average score is compared. The number of classes are three hours per week, and each class is 50 min long. The content of the textbooks is the same and the two sides do not know each other’s teaching situation. At the end of the semester, the two classes take the post-test on arithmetic and problem-solving, based on the basic sustainable learning of the semester. Finally, they fill in the motivation scale and questionnaire; the teacher will then conduct a statistical analysis and report to see if the students had any help in the new class or from the robot (
Figure 11). Our study focused on robot-assisted teaching in the traditional classroom, using the digital platform. Therefore, the students were divided into two groups, namely, the robot-assisted group and the non-robot-assisted group. Our system adopted the robot and the digital platform-assisted group in the traditional classroom. After school, the students can solve their question by asking the robot in front of the rest of the class. Our system has definitely verified that the robot interacts with the students, which improves their learning motivation.
10. Statistical Results and Analysis of Experimental Results
The results of the test are determined by the teacher. The statistics include the average of the pre-test scores and the post-test scores and the total average of the progress score, to assess whether the learning effectiveness of the students improved with the interactive teaching of robots. Our learning system was adopted by middle school students and the learning study top group is about the middle school mathematics domain. We tested the experimental group and the control group. The sample numbers are 25 and 25, respectively. The t-value and p-value are shown in
Table 4, where we find that the four factors (ARCS) are extremely significant when using the anticipatory computing and emotion big data for sustainable education learning. Our research investigation is mainly on teaching-assisted robots for classroom teaching, as well as the satisfaction and learning motivation of the teachers and students. This study focused on the students involved in this course, and the Student Learning Motivation Scale questionnaire design was used shown in
Appendix A (
Table A1). The design of the questionnaire was adapted from Keller (IMMS, Textbook Motivation Scale) [
9], which is a tool for the ARCS model that is used to determine the learner’s motivation. The questions contained four subscales, which were used to measure the learners’ attention, as well as the relevance, confidence, satisfaction and learning motivation of the teaching material, using the Likert five-point rating scale, from being very much disapproved (1) to very agreeable (5): the higher the score, the stronger the motivation, and vice versa. The topic is divided into four parts, namely, there are seven questions on Attention, seven questions on Relevance, seven questions on Confidence, and five questions on Satisfaction.
11. Conclusions
Digital learning on big data relies on the following: (1) From the big data extracting the efficient learning features, teachers can improve their teaching processes. (2) To predict the student’s performance, the teachers can identify the learning difficulties of the students. (3) The students can help to extract learning features from the big data. The goal of this research is to apply anticipatory computing to robots and to assist teachers in their teaching, which is shown in
Figure 12. We adopted the robot and digital platform-assisted system in the traditional classroom. After school, the students can solve their questions by asking the robot in front of the class. Our system has definitely verified that the robot interacts with the students, which improves their learning motivation. The most important purpose is to increase students’ sustainable learning motivation and to improve their learning outcomes, and interactive teaching is provided to stimulate the their enthusiasm for learning and their motivation, to improve the past teacher-oriented teaching methods, to integrate the robot into the classroom, to participate in the curriculum and to help the students to find solutions to problems and cultivate high-order thinking skills, based on anticipatory computing and emotion big data. This will improve the learning outcomes and have a positive impact on future education and fields of research. Our proposed system adopts digital learning in the big data discussion on emotion AI, and our system can improve the students’ performance and the teacher’s teaching techniques according to the big data. Our proposed digital system can detect the student’s emotions when they are learning, and the robot can give immediate feedback on their emotions. It is suitable for all students, based on their emotional classification, and it builds the assisted-teaching platform to help the teachers in class.
Author Contributions
Conceptualization, Y.-Z.H.; methodology, Y.-Z.H.; software, Y.-C.L.; validation, Y.-Z.H.; formal analysis, Y.-Z.H.; investigation, Y.-Z.H.; resources, Y.-Z.H.; data curation, S.-S.L.; writing—original draft preparation, Y.-Z.H.; writing—review and editing, Y.-Z.H. and Y.-C.L.; visualization, Y.-C.L. and S.-S.L.; supervision, Y.-Z.H.; project administration, Y.-Z.H.; funding acquisition, Y.-Z.H., S.-S.L., Y.-L.J., S.-W.T., C.-R.C. and P.-Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Science and Technology (contracts MOST-109-2221-E-019-057-, MOST-108-2221-E-019-038-MY2, MOST-107-2221-E-019-039-MY2, MOST-108-2634F-019-001, MOST-108-2634-F-008-001, MOST-109-2634-F008-007, and MOST-109-2634-F-019-001) of Taiwan. This research was also funded by the University System of Taipei Joint Research Program (contract USTP-NTUT-NTOU-106-02, USTP-NTUT-NTOU-107-04, USTP-NTUT-NTOU-109-01, USTP-NTOU-TMU-108-01 and USTP-NTUT-NTOU-108-04) of Taiwan.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
Questionnaire.
| Question |
|---|
| Attention |
| [1] It’s very interesting to hear the robot presentation. |
| [2] It’s very interesting to interact with the robot. |
| [3] It’s very interesting to see the robot help me answering question. |
| [4] It’s boring to interact with the robot. |
| [5] The robot can help me to pay attention in class. |
| [6] The robot assists me doing more exercises. |
| [7] The interactive learning helps me to focus more. |
| Relevance |
| [1] The interactive learning method helps me to understand the content. |
| [2] The robot can help me understanding the question. |
| [3] The robot’s suggestion is very helpful. |
| [4] The interactive learning cannot help me understanding the content. |
| [5] The robot can help me to be more constructive. |
| [6] The interactive learning can let me feel more related to the contents. |
| [7] The robot can help me quickly find the answer. |
| Confidence |
| [1] The content in the class is not difficult for me. |
| [2] The robot can help me more feel comfortable in class. |
| [3] The interactive learning helps me more to be creative. |
| [4] After interactive learning, I can find the best solution. |
| [5] After interactive learning, I do not feel I have learnt new knowledge. |
| [6] After interactive learning, I often discuss with my classmates. |
| [7] After interactive learning, I can perform well. |
| Satisfaction |
| [1] After interactive learning, I feel more satisfied with my learning. |
| [2] I’m satisfied with my homework. |
| [3] I would like the robot assisting me to find answer. |
| [4] I don’t like interacting with the robot. |
| [5] I’m satisfied with my learning activity in class. |
| [6] I’m satisfied with team work in class. |
| [7] I’m satisfied with my exam score in class. |
References
- Rosen, R. Anticipatory Systems; Philosophical Mathematical and Methodological Foundations; Pergamon Press: New York, NY, USA, 1985. [Google Scholar]
- Chen, G.; Kotz, D. A Survey of Context-Aware Mobile Computing Research. 2000. Available online: https://pdfs.semanticscholar.org/a9d0/b687da10c70bbbcc73d3657c96d92af6ada2.pdf?_ga=2.246235847.276034082.1594098662-71393538.1593663719 (accessed on 1 December 2019).
- Butz, M.V.; Sigaud, O.; Gérard, P. Anticipatory behavior: Exploiting knowledge about the future to improve current behavior. In Anticipatory Behavior in Adaptive Learning Systems; Springer: Berlin, Germany, 2003; pp. 1–10. [Google Scholar]
- Lin, C.; Zhao, G.; Wu, Y.J.; Li, H. Anticipatory computing for human behavioral change intervention: A systematic review. IEEE Access 2019, 7, 103738–103750. [Google Scholar] [CrossRef]
- Nadin, M. (Ed.) Anticipation and Computation: Is Anticipatory Computing Possible? In Anticipation Across Disciplines. Cognitive Systems Monographs; Springer: Cham, Switzerland, 2016; p. 29. [Google Scholar]
- Burbey, I.; Martin, T.L. A survey on predicting personal mobility. Int. J. Pervasive Comput. Commun. 2012, 8, 5–22. [Google Scholar] [CrossRef]
- Pantic, M.; Pentland, A.; Nijholt, A.; Huang, T.S. Human Computing and Machine Understanding of Human Behavior: A Survey. In Artifical Intelligence for Human Computing; Springer: Berlin, Germany, 2007. [Google Scholar]
- Lu, H.; Frauendorfer, D.; Rabbi, M.; Mast, M.S.; Chittaranjan, G.T.; Campbell, A.T.; Gatica-Perez, D.; Choudhury, T. StressSense: Detecting stress in unconstrained acoustic environments using smartphones. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, New York, NY, USA, 5–8 September 2012; pp. 351–360. [Google Scholar]
- Pejovic, V.; Mehrotra, A.; Musolesi, M.; Nadin, M. Anticipatory Mobile Digital Health: Towards Personalized Proactive Therapies and Prevention Strategies. In Anticipation and Medicine; Springer: Cham, Switzerland, 2017; pp. 253–267. [Google Scholar]
- Baniwal, V.; Kayal, C.; Shah, D.; Ma, P.; Khadilkar, H. An Imitation Learning Approach for Computing Anticipatory Picking Decisions in Retail Distribution Centres. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4186–4191. [Google Scholar]
- Ciolacu, M.; Tehrani, A.F.; Binder, L.; Svasta, P.M. Education 4.0—Artificial Intelligence Assisted Higher Education: Early recognition System with Machine Learning to support Students’ Success. In Proceedings of the 2018 IEEE 24th International Symposium for Design and Technology in Electronic Packaging (SIITME), Iasi, Romania, 25–28 October 2018; pp. 23–30. [Google Scholar]
- Hossain, M.; Alam, S. Intelligent anticipatory agents for changing environments. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 004597–004602. [Google Scholar]
- Jeon, H.; Oh, H.; Lee, J. Machine Learning based Fast Reading Algorithm for Future ICT based Education. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 771–775. [Google Scholar]
- Sakulkueakulsuk, B.; Witoon, S.; Ngarmkajornwiwat, P.; Pataranutaporn, P.; Surareungchai, W.; Pataranutaporn, P.; Subsoontorn, P. Kids making AI: Integrating Machine Learning, Gamification, and Social Context in STEM Education. In Proceedings of the 2018 IEEE International Conference on Teaching, Assessment, and Learning for Engineering (TALE), Wollongong, NSW, Australia, 4–7 December 2018; pp. 1005–1010. [Google Scholar]
- Dolezel, P.; Dvorak, M. Computer game as a tool for machine learning education. In Proceedings of the 2017 21st International Conference on Process Control (PC), Strbske Pleso, Slovakia, 6–9 June 2017; pp. 104–108. [Google Scholar]
- Ciolacu, M.; Tehrani, A.F.; Beer, R.; Popp, H. Education 4.0—Fostering student’s performance with machine learning methods. In Proceedings of the 2017 IEEE 23rd International Symposium for Design and Technology in Electronic Packaging (SIITME), Constanta, Romania, 26–29 October 2017; pp. 438–443. [Google Scholar]
- Uskov, V.L.; Bakken, J.P.; Byerly, A.; Shah, A. Machine Learning-based Predictive Analytics of Student Academic Performance in STEM Education. In Proceedings of the 2019 IEEE Global Engineering Education Conference (EDUCON), Dubai, UAE, 8–11 April 2019; pp. 1370–1376. [Google Scholar]
- Akalin, N.; Uluer, P.; Kose, H.; Ince, G. Humanoid robots communication with participants using sign language: An interaction based sign language game. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Tokyo, Japan, 7–9 November 2013. [Google Scholar]
- Costa, S.; Soares, F.; Pereira, A.P.; Santos, C.; Hiolle, A. Building a Game Scenario to Encourage Children with Autism to Recognize and Label Emotions using a Humanoid Robot. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, 2014 RO-MAN, Edinburgh, UK, 25–29 August 2014. [Google Scholar]
- Park, S.J.; Han, J.H.; Kang, B.H.; Shin, K.C. Teaching Assistant Robot, ROBOSEM, in English Class and Practical Issues for its Diffusion. In Proceedings of the 2011 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Half-Moon Bay, CA, USA, 2–4 October 2011. [Google Scholar]
- Kose, H.; Yorganci, R.; Itauma, I.I. Humanoid Robot Assisted Interactive Sign Language Tutoring Game. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO), Karon Beach, Phuket, Thailand, 7–11 December 2011. [Google Scholar]
- Han, J.; Kang, S.; Song, S. The Design of Monitor-based Faces for Robot-Assisted Language Learning. In Proceedings of the 2013 IEEE RO-MAN, Gyeongju, Korea, 26–29 August 2013. [Google Scholar]
- Amal, A.; Az-Eddine, N.; Souhaib, A. Survey of Intelligent Collaborative E-Learning Systems. In Proceedings of the 2017 15th International Conference on Emerging eLearning Technologies and Applications (ICETA), La Plata, Argentina, 26–27 October 2017. [Google Scholar]
- Tanizaki, Y.; Jimenez, F.; Kanoh, M. Learning effect of robotic encouragement-based collaborative learning. In Proceedings of the 2017 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Naples, Italy, 9–12 July 2017. [Google Scholar]
- Chang, Y.-H.; Lin, P.-R.; Lu, Y.-T. Development of a Kinect-Based English Learning System Based on Integrating the ARCS Model with Situated Learning. Sustainability 2020, 12, 2037. [Google Scholar] [CrossRef] [Green Version]
- Maldonado, J.J.; Pérez-Sanagustín, M.; Bermeo, J.L.; Muñoz, L.; Pacheco, G.; Espinoza, I. Flipping the classroom with MOOCs. A pilot study exploring differences between self-regulated learners. In Proceedings of the 2017 Twelfth Latin American Conference on Learning Technologies (LACLO), Stary Smokovec, Slovakia, 9–13 October 2017. [Google Scholar]
- Tjhin, V.U.; Tjhin, V.U.; Soraya, K. Evaluating the performance of students through collaborative learning: Case study: Distance education program in Indonesia. In Proceedings of the 2017 10th International Conference on Human System Interactions (HSI), Ulsan, Korea, 17–19 July 2017. [Google Scholar]
- Keller, J.M. Development and use of the ARCS model of instructional design. J. Instr. Dev. 1987, 10. [Google Scholar] [CrossRef]
- Lytras, M.D.; Raghavan, V.; Damiani, E. Big data and data analytics research: From metaphors to value space for collective wisdom in human decision making and smart machines. Int. J. Semant. Web Inf. Syst. 2017, 13, 1–10. [Google Scholar] [CrossRef]
- Lytras, M.D.; Visvizi, A. Who Uses Smart City Services and What to Make of It: Toward Interdisciplinary Smart Cities Research. Sustainability 2018, 10, 1998. [Google Scholar] [CrossRef] [Green Version]
- Marechal, C.; Mikołajewski, D.; Tyburek, K.; Prokopowicz, P.; Bougueroua, L.; Ancourt, C.; Węgrzyn-Wolska, K. Survey on AI-Based Multimodal Methods for Emotion Detection. In High-Performance Modelling and Simulation for Big Data Applications. Lecture Notes in Computer Science; Kołodziej, J., González-Vélez, H., Eds.; Springer: Cham, Switzerland, 2019; p. 11400. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











