Prediction of Fuel Loading Following Mastication Treatments in Forest Stands in North Idaho, USA



Abstract
:1. Introduction
2. Materials and Methods
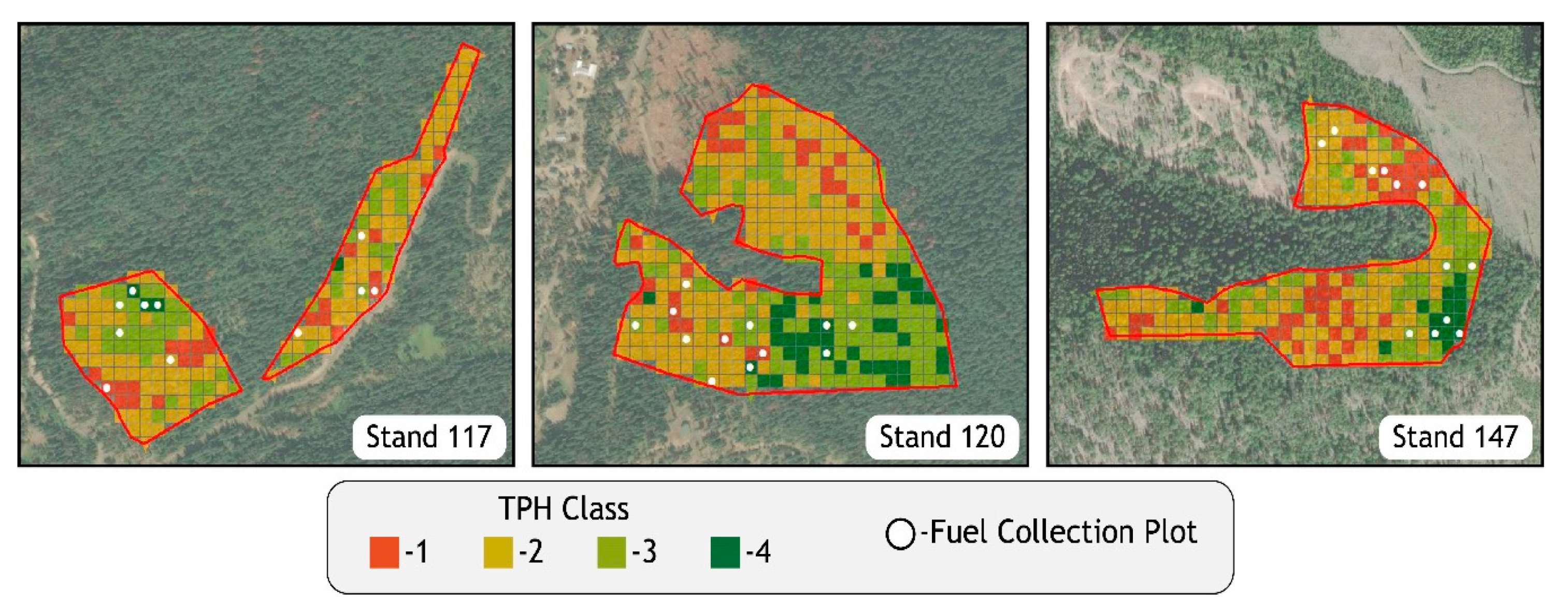
2.1. Study Site
2.2. LiDAR Processing and Sample Plot Selection
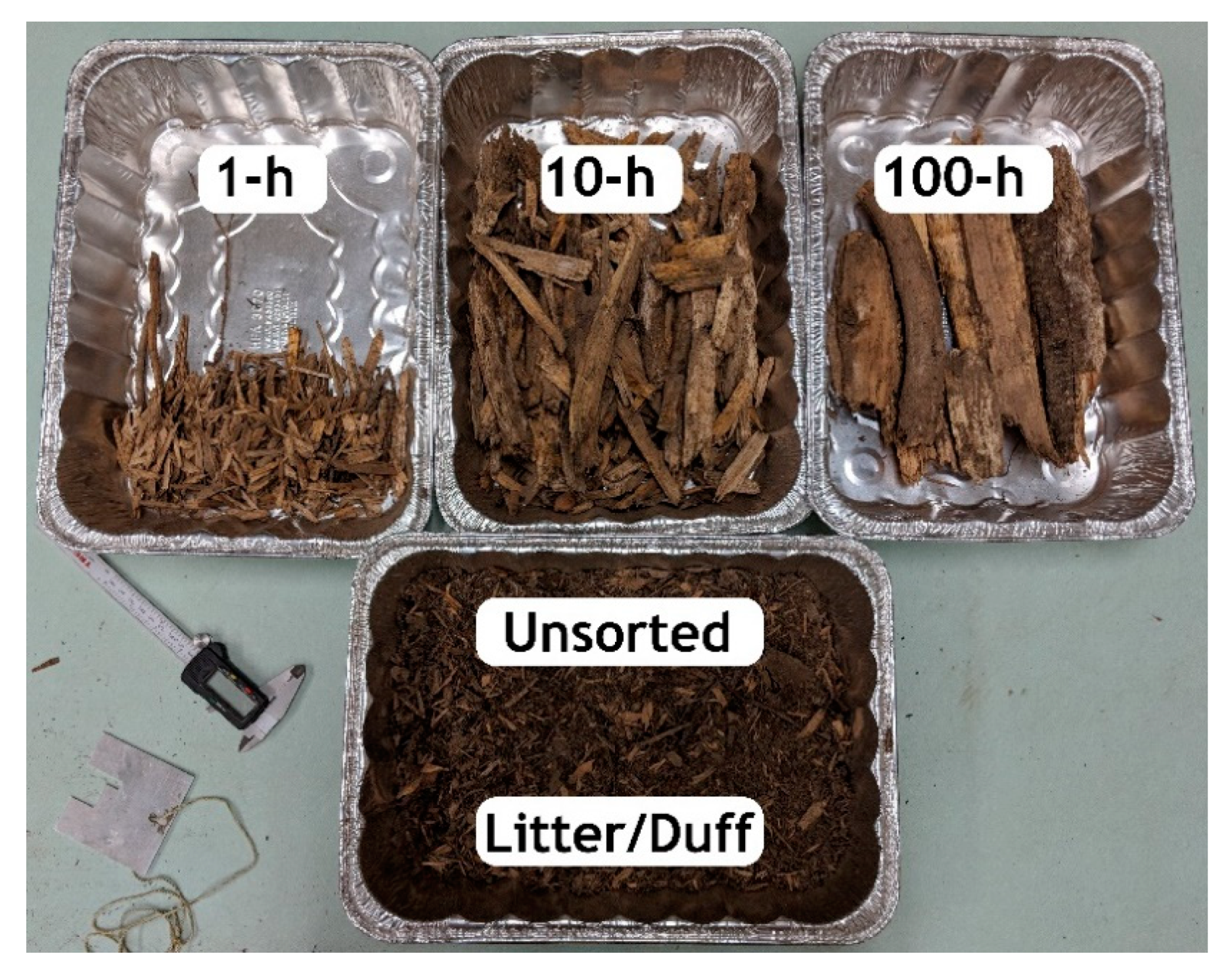
2.3. Field Sampling Procedures
2.4. Lab Measurements and Fuel Characterization
3. Results
4. Discussion
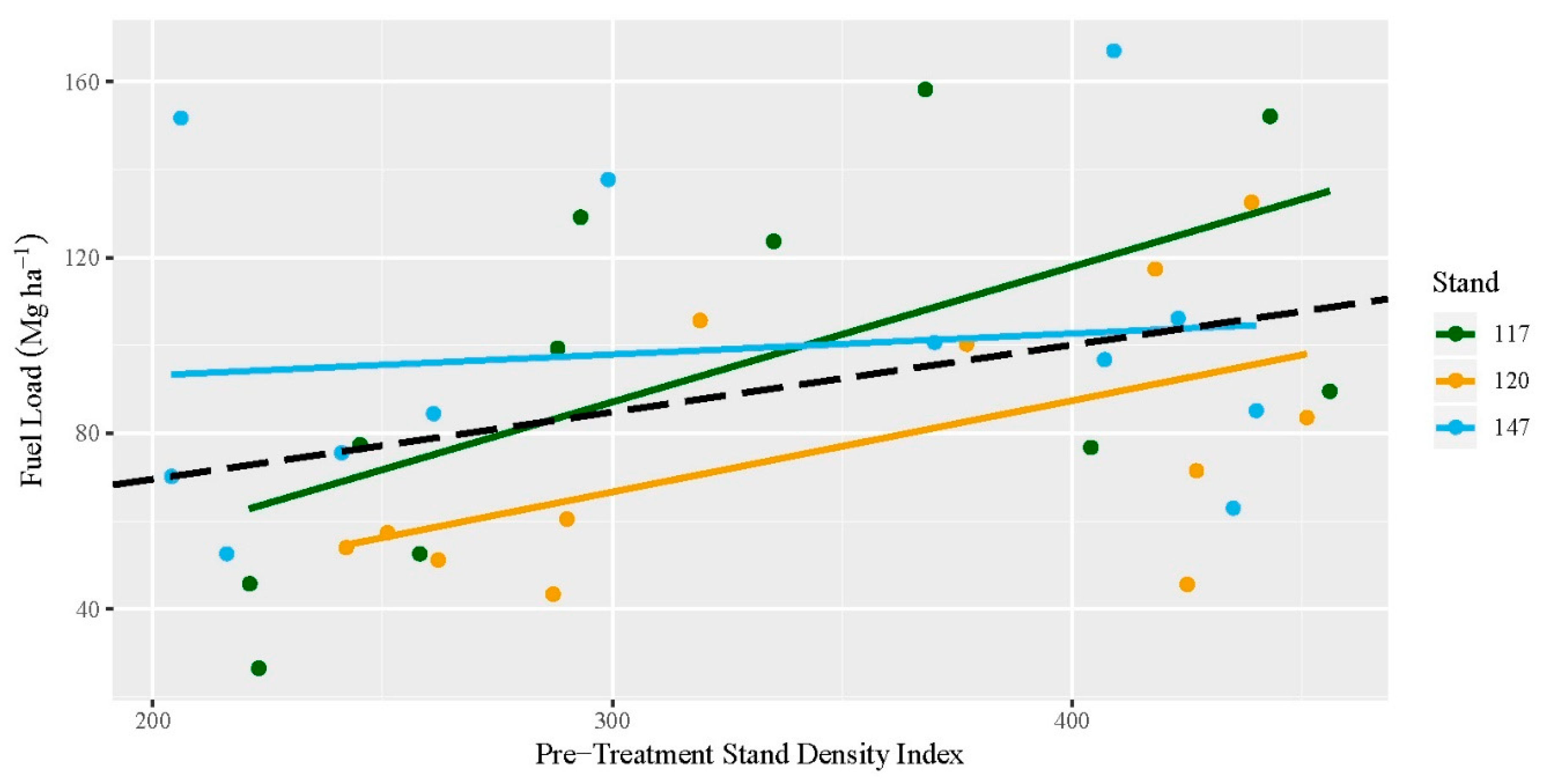
4.1. Relationship between Pre-Treatment Stand Characteristics and Fuel Loading
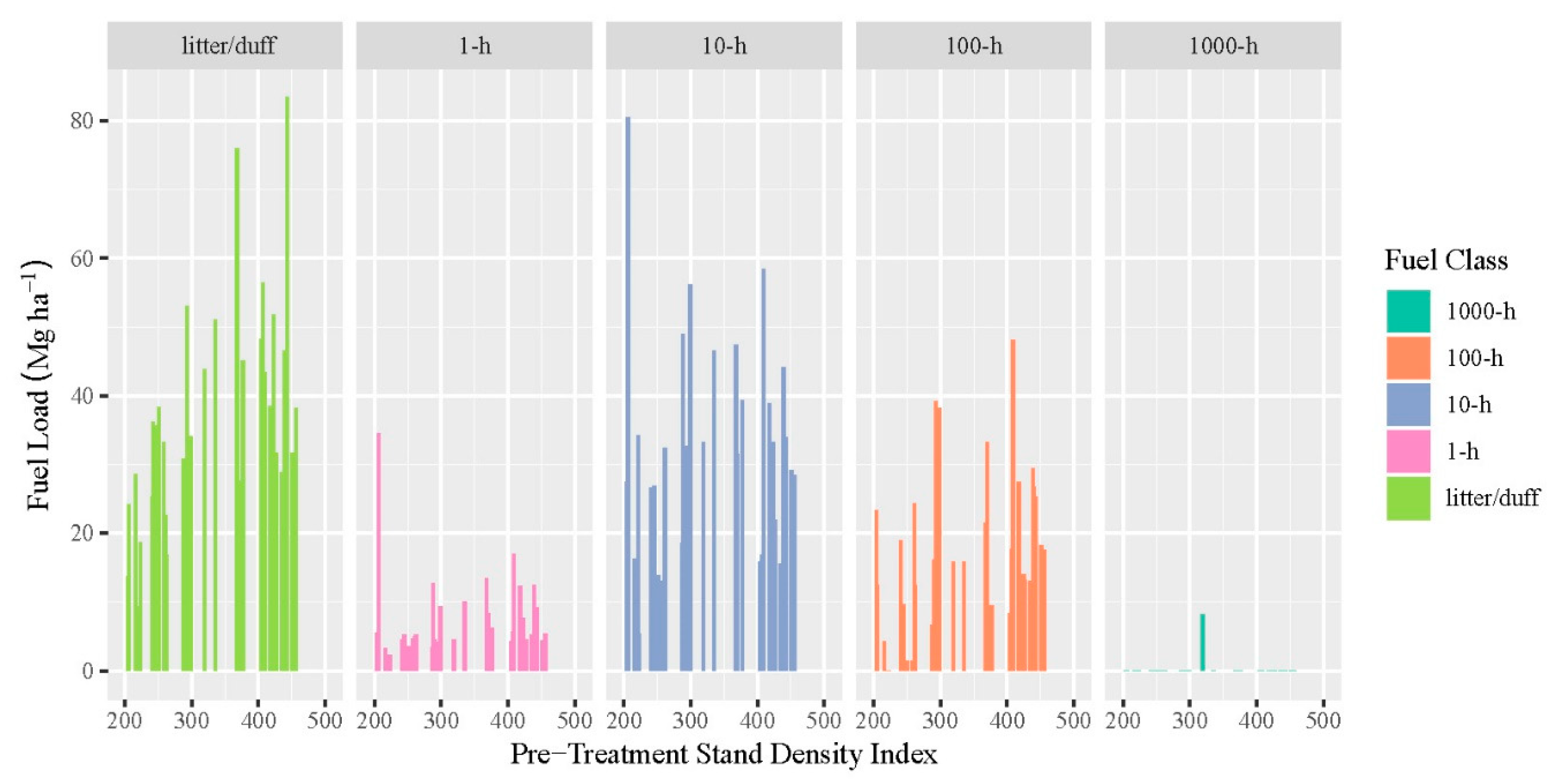
4.2. Relationship between Pre-Treatment Stand Density and Fuel Class Distribution
4.3. Study Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Reinhardt, E.D.; Keane, R.E.; Calkin, D.E.; Cohen, J.D. Objectives and considerations for wildland fuel treatment in forested ecosystems of the interior western United States. For. Ecol. Manag. 2008, 256, 1997–2006. [Google Scholar] [CrossRef]
- Hartsough, B.R.; Abrams, S.; Barbour, R.J.; Drews, E.S.; McIver, J.D.; Moghaddas, J.J.; Schwilk, D.W.; Stephens, S.L. The economics of alternative fuel reduction treatments in western United States dry forests: Financial and policy implications from the National Fire and Fire Surrogate Study. For. Policy Econ. 2008, 10, 344–354. [Google Scholar] [CrossRef]
- Oliveira, T.M.; Barros, A.M.G.; Ager, A.A.; Fernandes, P.M. Assessing the effect of a fuel break network to reduce brunt area and wildfire risk transmission. Int. J. Wildland Fire 2016, 25, 619–632. [Google Scholar] [CrossRef]
- Alcasena, F.J.; Ager, A.A.; Salis, M.; Day, M.A.; Vega-Garcia, C. Optimizing prescribed fire allocation for managing fire risk in central Catalonia. Sci. Total. Environ. 2018, 621, 872–885. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agee, J.K.; Skinner, C.N. Basic principles of forest fuel reduction treatments. For. Ecol. Manag. 2005, 211, 83–96. [Google Scholar] [CrossRef]
- Stephens, S.L.; Moghaddas, J.J.; Edminster, C.; Fiedler, C.E.; Haase, S.; Harrington, M.; Keeley, J.E.; Knapp, E.E.; McIver, J.D.; Metlen, K.; et al. Fire treatment effects on vegetation structure, fuels, and potential fire severity in western U.S. forests. Ecol. Appl. 2009, 19, 305–320. [Google Scholar] [CrossRef] [Green Version]
- Agee, J.K. The influence of forest structure on fire behavior. In Proceedings of the 17th Annual Forest Vegetation Management Conference, Redding, CA, USA, 16–18 January 1996; pp. 52–68. [Google Scholar]
- Stephens, S.L. Effects of fuels and silvicultural treatments on potential fire behavior in mixed conifer forests of the Sierra Nevada, CA. For. Ecol. Manag. 1998, 105, 21–34. [Google Scholar] [CrossRef]
- Huggett, R.J., Jr.; Abt, K.L.; Shepperd, W. Efficacy of mechanical fuel treatments for reducing wildfire hazard. For. Policy Econ. 2008, 10, 408–414. [Google Scholar] [CrossRef]
- Battaglia, M.A.; Rocca, M.E.; Rhoades, C.C.; Ryan, M.G. Surface fuel loadings within mulching treatments in Colorado conifer forests. For. Ecol. Manag. 2010, 260, 1557–1566. [Google Scholar] [CrossRef]
- Kane, J.M.; Knapp, E.E.; Varner, J.M. Variability in loadings of mechanically masticated fuel beds in northern California and southwestern Oregon. In Fuels Management-How to Measure Success: Conference Proceedings, Proceedings RMRS-P-41, Portland, OR, USA, 28–30 March 2006; Andrews, P.L., Butler, B.W., Eds.; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006; pp. 341–350. [Google Scholar]
- Jain, T.; Graham, R.T.; Sandquist, J.; Butler, M.; Brockus, K.; Frigard, D.; Cobb, D.; Sup-Han, H.; Halbrook, J.; Denner, R.; et al. Restoration of northern Rocky Mountain moist forests: Integrating fuel treatments from the site to the landscape. In Integrated Restoration of Forested Ecosystems to Achieve Multiresource Benefits, Proceedings of the 2007 National Silviculture Workshop, Gen. Tech. Rep. PNW-GTR-733, Ketchikan, AK, USA, 7–10 May 2007; Deal, R.L., Ed.; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 2008. [Google Scholar]
- Jain, T.; Sikkink, P.; Keefe, R.; Byrne, J. To Masticate or Not: Useful Tips for Treating Forest, Woodland, and Shrubland Vegetation; Gen. Tech. Rep. RMRS-GTR-381; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2018.
- Kane, J.M.; Varner, J.M.; Knapp, E.E. Novel fuelbed characteristics associated with mechanical mastication treatments in northern California and south-western Oregon, USA. Int. J. Wildland Fire 2009, 18, 688–697. [Google Scholar] [CrossRef] [Green Version]
- Kreye, J.K.; Brewer, N.W.; Morgan, P.; Varner, J.M.; Smith, A.M.S.; Hoffman, C.M.; Ottmar, R.D. Fire behavior in masticated fuels: A review. For. Ecol. Manag. 2014, 314, 193–207. [Google Scholar] [CrossRef]
- Stephens, S.L.; Moghaddas, J.J. Fuel treatment effects on snags and course woody debris in a Sierra Nevada mixed conifer forest. For. Ecol. Manag. 2005, 214, 53–64. [Google Scholar] [CrossRef]
- Hood, S.; Wu, R. Estimating fuelbed loadings in masticated areas. In Fuels Management-How to Measure Success: Conference Proceedings, Proceedings RMRS-P-41, Portland, OR, USA, 28–30 March 2006; Andrews, P.L., Butler, B.W., Eds.; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006; pp. 333–340. [Google Scholar]
- Reiner, A.L.; Vaillant, N.M.; Fites-Kaufman, J.; Dailey, S.N. Mastication and prescribed fire impacts on fuels in a 25-year old ponderosa pine plantation, southern Sierra Nevada. For. Ecol. Manag. 2009, 258, 2365–2372. [Google Scholar] [CrossRef]
- Arroyo, L.A.; Pascual, C.; Manzanera, J.A. Fire models and methods to map fuel types: The role of remote sensing. For. Ecol. Manag. 2008, 256, 1239–1252. [Google Scholar] [CrossRef] [Green Version]
- Keane, R.E.; Burgan, R.; van Wagtendonk, J. Mapping wildland fuels for fire management across multiple scales: Integrating remote sensing, GIS, and biophysical modelling. Int. J. Wildland Fire 2001, 10, 301–319. [Google Scholar] [CrossRef]
- Rollins, M.G.; Keane, R.E.; Parsons, R.A. Mapping fuel and fire regimes using remote sensing, ecosystem simulation, and gradient modeling. Ecol. Appl. 2004, 14, 75–95. [Google Scholar] [CrossRef] [Green Version]
- Falkowski, M.J.; Gessler, P.E.; Morgan, P.; Hudak, A.T.; Smith, A.M.S. Characterizing and mapping forest fire fuels using ASTER imagery and gradient modeling. For. Ecol. Manag. 2005, 217, 129–146. [Google Scholar] [CrossRef] [Green Version]
- Maltamo, M.; Eerikainen, K.; Pitkanen, J.; Hyyppa, J.; Vehmas, M. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Andersen, H.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Skowronski, N.S.; Clark, K.L.; Duveneck, M.; Hom, J. Three-dimensional canopy fuel loading predicted using upward and downward sensing LiDAR systems. Remote Sens. Environ. 2011, 115, 703–714. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, X.; Yebra, M.; Harris, S.; Tapper, N. Development of a predictive model for estimating forest surface fuel load in Australian eucalypt forests with LiDAR data. Environ. Model. Softw. 2017, 97, 61–71. [Google Scholar] [CrossRef]
- Jakubowski, M.K.; Guo, Q.; Collins, B.; Stephens, S.; Kelly, M. Predicting surface fuel models and fuel metrics using lidar and CIR imagery in a dense, mountainous forest. Photogramm. Eng. Remote Sens. 2013, 79, 37–49. [Google Scholar] [CrossRef] [Green Version]
- Mutlu, M.; Popescu, S.C.; Stripling, C.; Spencer, T. Mapping surface fuel models using lidar and multispectral data fusion for fire behavior. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Van Aardt, J.A.N.; Arthur, M.; Sovkoplas, G.; Swetnam, T.L. LiDAR-based estimation of forest floor fuel loads using a novel distributional approach. In Proceedings of the SilviLaser 2011, Hobart, Australia, 16–20 October 2011. [Google Scholar]
- Mutlu, M.; Popescu, S.C.; Zhao, K. Sensitivity analysis of fire behavior modeling with LIDAR-derived surface fuel maps. For. Ecol. Manag. 2008, 256, 289–294. [Google Scholar] [CrossRef]
- Kramer, H.A.; Collins, B.M.; Kelly, M.; Stephens, S.L. Quantifying ladder fuels: A new approach to using LiDAR. Forests 2014, 5, 1432–1453. [Google Scholar] [CrossRef]
- Skowronski, N.; Clark, K.; Nelson, R.; Hom, J.; Patterson, M. Remotely sensed measurements of forest structure and fuel loads in the Pinelands of New Jersey. Remote Sens. Environ. 2007, 108, 123–129. [Google Scholar] [CrossRef]
- Garcia, M.; Riano, D.; Chuvieco, E.; Salas, J.; Danson, F.M. Multispectral and lidar data fusion for fuel type mapping using Support Vector Machine and decision rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- Koetz, B.; Morsdorf, F.; van der Linden, S.; Curt, T.; Allgower, B. Multi-source land cover classification for forest fire management based on imaging spectrometry and lidar data. For. Ecol. Manag. 2008, 256, 263–271. [Google Scholar] [CrossRef]
- Price, O.F.; Gordon, C.E. The potential for LiDAR technology to map fire fuel hazard over large areas of Australian forests. J. Environ. Manag. 2016, 181, 663–673. [Google Scholar] [CrossRef]
- Garcia, M.; Saatchi, S.; Casas, A.; Koltunov, A.; Ustin, S.L.; Ramirez, C.; Balzter, H. Extrapolating forest canopy fuel properties in the California Rim Fire by combining airborne LiDAR and Landsat OLI data. Remote Sens. 2017, 9, 394. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhu, X.; Yebra, M.; Harris, S.; Tapper, N. Strata-based forest fuel classification for wild fire hazard assessment using terrestrial LiDAR. J. Appl. Remote Sens. 2016, 10, 046025. [Google Scholar] [CrossRef] [Green Version]
- Vermey, B.; (Nez Perce-Clearwater National Forest Red River Ranger District, Elk City, ID, USA). Personal communication, 2017.
- Dixon, G.E. Essential FVS: A User’s Guide to the Forest Vegetation Simulator. Internal Report; U.S. Department of Agriculture, Forest Service, Forest Management Service Center: Fort Collins, CO, USA, 2002.
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Liaw, A.; Wiener, M. Classification and Regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Becker, R.M.; Keefe, R.F.; Anderson, N.M.; Eitel, J.U.H. Use of LiDAR-derived landscape parameters to characterize alternative harvest system options in the Inland Northwest. Int. J. For. Eng. 2018, 29, 179–191. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing; R Core Team: Vienna, Austria, 2020; Available online: https://www.R-project.org/ (accessed on 12 February 2020).
- Breiman, L. Manual on Setting Up, Using, and Understanding Random Forests v3.1; Statistics Department University of California: Berkeley, CA, USA, 2002; Available online: https://www.stat.berkeley.edu/~breiman/RandomForests/cc_manual.htm (accessed on 13 February 2020).
- Brosofske, K.D.; Froese, R.E.; Falkowski, M.J.; Banskota, A. A review of methods for mapping and prediction of inventory attributes for operational forest management. For. Sci. 2014, 60, 733–756. [Google Scholar] [CrossRef]
- Cinaroglu, S. Comparison of performance of decision tree algorithms and random forest: An application of OECD countries health expenditures. Int. J. Comput. Appl. 2016, 138, 37–41. [Google Scholar] [CrossRef]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Evans, J.S.; Murphy, M.A. rfUtilities: Random Forests Model Selection and Performance Evaluation. R Package Version 2.0-1. Available online: http://rdocumentation.org/packages/rfUtilities/versions/2.0-1.html. (accessed on 15 May 2017).
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization. February 2013–FUSION Version 3.60; USDA Forest Service, Pacific Northwest Research Station, University of Washington: Seattle, WA, USA, 2017; Available online: http://forsys.sefs.uw.edu/fusion/fusionlatest.html (accessed on 15 June 2017).
- Reineke, L.H. Perfecting stand-density index for even-aged forests. J. Agric. Res. 1933, 46, 627–638. [Google Scholar]
- Woodall, C.W.; Miles, P.D.; Vissage, J.S. Determining maximum stand density index in mixed species stands for strategic-scale stocking assessments. For. Ecol. Manag. 2005, 216, 367–377. [Google Scholar] [CrossRef]
- Shaw, J.D. Reineke’s stand density index: Where are we and where do we go from here? In Proceedings of the Society of American Foresters National Convention, Fort Worth, TX, USA, 19–23 October 2005; Society of American Foresters: Bethesda, MD, USA, 2006. [Google Scholar]
- Ducey, M.J.; Knapp, R.A. A stand density index for complex mixed species forests in the northeastern United States. For. Ecol. Manag. 2010, 260, 1613–1622. [Google Scholar] [CrossRef]
- VanderSchaaf, C.L. Reineke’s stand density index: A quantitative and nonunitless measure of stand density. In Proceedings of the 15th Biennial Southern Silvicultural Research Conference, Hot Springs, AK, USA, 17–20 November 2008; Southern Research Station: Asheville, NC, USA, 2013; pp. 577–579. [Google Scholar]
- Brown, J.K. Handbook for Inventorying Downed Woody Material; Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1974.
- Pinheiro, J. Fit and Compare Gaussian Linear and Nonlinear Mixed-Effects Models. 2020. Available online: https://svn.r-project.org/R-packages/trunk/nlme/ (accessed on 15 August 2019).
- Laird, N.M.; Ware, J.H. Random-effects models for longitudinal data. Biometrics 1982, 38, 963–974. [Google Scholar] [CrossRef] [PubMed]
- Fekety, P.A.; Falkowski, M.J.; Hudak, A.T.; Jain, T.B.; Evans, J.S. Transferability of lidar-derived basal area and stem density models within a Northern Idaho ecoregion. Can. J. Remote Sens. 2018, 44, 131–143. [Google Scholar] [CrossRef]
- Hudak, A.T.; Bright, B.C.; Pokswinski, S.M.; Loudermilk, E.L.; O’Brien, J.J.; Hornsby, B.S.; Klauberg, C.; Silva, C.A. Mapping forest structure and composition from low-density LiDAR for informed forest, fuel, and fire management at Englin Air Force Base, Florida, USA. Can. J. Remote Sens. 2016, 42, 411–427. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Hudak, A.T.; Crookston, N.L.; Gessler, P.E.; Uebler, E.H.; Smith, A.M.S. Landscape-scale parameterization of a tree-level forest growth model: A k-nearest neighbor imputation approach using LiDAR data. Can. J. For. Res. 2010, 40, 184–199. [Google Scholar] [CrossRef]
- Brewer, N.W.; Smith, A.M.S.; Hatten, J.A.; Higuera, P.H.; Hudak, A.T.; Ottmar, R.D.; Tinkman, W.T. Fuel moisture influences on fire-altered carbon in masticated fuels: An experimental study. J. Geophys. Res. Biogeosci. 2013, 118, 30–40. [Google Scholar] [CrossRef] [Green Version]
- Lyon, Z.D.; Morgan, P.; Stevens-Rumann, C.S.; Sparks, A.M.; Keefe, R.F.; Smith, A.M.S. Fire behavior in masticated forest fuels: Lab and prescribed fire experiments. Int. J. Wildland Fire 2018, 27, 280–292. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Random Forest | Prediction Mean | RMSE | R-Squared | Accuracy (%) |
|---|---|---|---|---|
| Stand Density (TPH) | 468.00 | 217.36 | 0.55 | 71.5 |
| Basal Area (m2 ha−1) | 30.56 | 12.95 | 0.63 | 77.4 |
| Total Volume (m3 ha−1) | 307.99 | 165.35 | 0.57 | 76.3 |
| Stand Density Index (SDI) | 299.17 | 110.296 | 0.45 | 79.0 |
| Stand | Pre-TPH Avg. (SE) | Fuel Loading (Mg ha−1) Avg. (SE) | Fuel Depth (cm) Avg. (SE) | Bulk Density (kg m−3) Avg. (SE) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Litter/ Duff | 1-h | 10-h | 100-h | 1000-h | Total | ||||
| 117 | 530 | 43.4 | 6.7 | 30.3 | 13.2 | 0.0 | 93.7 | 15.6 | 59.0 |
| (77) | (6.7) | (1.2) | (4.3) | (3.7) | (0.0) | (13.1) | (1.5) | (5.8) | |
| 120 | 515 | 31.9 | 5.5 | 25.3 | 13.4 | 0.7 | 76.8 | 16.1 | 48.2 |
| (77) | (3.3) | (1.0) | (3.2) | (2.6) | (0.7) | (8.8) | (1.2) | (4.4) | |
| 147 | 516 | 32.9 | 9.1 | 34.3 | 22.8 | 0.0 | 99.2 | 18.4 | 59.2 |
| (93) | (3.6) | (2.5) | (5.9) | (3.6) | (0.0) | (10.4) | (1.5) | (10.6) | |
| Correlation | T | DF | p-Value | Coefficient |
|---|---|---|---|---|
| Density (TPH)/Loading (Mg ha−1) | 2.2812 | 33 | 0.0291 | 0.3691 |
| Density (TPH)/Bulk Density (kg m−3) | 1.566 | 33 | 0.1269 | 0.2630 |
| Volume (m3 ha−1)/Loading (Mg ha−1) | 1.8018 | 33 | 0.0807 | 0.2993 |
| Volume (m3 ha−1)/Bulk Density (kg m−3) | 1.1251 | 33 | 0.2687 | 0.1922 |
| Basal Area (m2 h−1)/Loading (Mg ha−1) | 1.9676 | 33 | 0.0576 | 0.3240 |
| Basal Area (m2 h−1)/Bulk Density (kg m−3) | 1.3492 | 33 | 0.1865 | 0.2286 |
| Stand Density Index/Loading (Mg ha−1) | 2.2004 | 33 | 0.0349 | 0.3577 |
| Stand Density Index/Bulk Density (kg m−3) | 1.8702 | 33 | 0.0704 | 0.3096 |
| Stand 117, 120, 147 | ||||
|---|---|---|---|---|
| Predictor | Estimate | Std. Error | DF | p-Value |
| TPH | 0.05318 | 0.025974 | 22 | 0.0527 |
| SDI | 0.16736 | 0.079809 | 22 | 0.0477 |
| Stand 117, 120 | ||||
| Predictor | Estimate | Std. Error | DF | p-Value |
| TPH | 0.09524 | 0.029924 | 14 | 0.0066 |
| SDI | 0.227069 | 0.09647 | 14 | 0.0337 |
| Stand 117, 120, 147 | |||||
|---|---|---|---|---|---|
| Fuel Class | Predictor | Estimate | Std. Error | DF | p-Value |
| Litter/Duff | TPH | 0.0033284 | 0.0010120 | 22 | 0.0034 |
| 1-h | TPH | 0.0000789 | 0.0003873 | 22 | 0.8405 |
| 10-h | TPH | 0.0000719 | 0.0009999 | 22 | 0.9433 |
| 100-h | TPH | 0.0015591 | 0.0008138 | 22 | 0.0685 |
| 1000-h | TPH | −0.0000106 | 0.0000901 | 22 | 0.9072 |
| Litter/Duff | SDI | 0.096484 | 0.030246 | 22 | 0.0042 |
| 1-h | SDI | 0.001137 | 0.012228 | 22 | 0.9267 |
| 10-h | SDI | 0.004637 | 0.031801 | 22 | 0.8854 |
| 100-h | SDI | 0.0562922 | 0.024141 | 22 | 0.0293 |
| 1000-h | SDI | −0.0007695 | 0.002888 | 22 | 0.7924 |
| Stand 117, 120 | |||||
| Fuel Class | Predictor | Estimate | Std. Error | DF | p-Value |
| Litter/Duff | TPH | 0.0038925 | 0.0015411 | 14 | 0.0242 |
| 1-h | TPH | 0.0008194 | 0.0003215 | 14 | 0.0232 |
| 10-h | TPH | 0.0021593 | 0.0010591 | 14 | 0.0608 |
| 100-h | TPH | 0.0025606 | 0.0007890 | 14 | 0.0059 |
| 1000-h | TPH | −0.0000245 | 0.0001527 | 14 | 0.8747 |
| Litter/Duff | SDI | 0.095805 | 0.046646 | 14 | 0.0592 |
| 1-h | SDI | 0.019364 | 0.010368 | 14 | 0.0829 |
| 10-h | SDI | 0.058114 | 0.034173 | 14 | 0.1111 |
| 100-h | SDI | 0.057603 | 0.026532 | 14 | 0.0476 |
| 1000-h | SDI | −0.002020 | 0.004787 | 14 | 0.6794 |
| Stand Density (TPH) | ||||
|---|---|---|---|---|
| Fuel Class | Estimate | Std. Error | DF | p-Value |
| Litter/Duff | 0.00560 | 0.009796 | 22 | 0.5736 |
| 1-h | −0.00190 | 0.0021351 | 22 | 0.3825 |
| 10-h | −0.01581 | 0.006169 | 22 | 0.0178 |
| 100-h | 0.01161 | 0.006380 | 22 | 0.0823 |
| 1000-h | −0.0001 | 0.000850 | 22 | 0.9072 |
| Stand Density Index (SDI) | ||||
| Fuel Class | Estimate | Std. Error | DF | p-Value |
| Litter/Duff | 0.00766 | 0.03098 | 22 | 0.8069 |
| 1-h | −0.007688 | 0.006679 | 22 | 0.2620 |
| 10-h | −0.04619 | 0.019931 | 22 | 0.0302 |
| 100-h | 0.042089 | 0.019346 | 22 | 0.0406 |
| 1000-h | −0.0007254 | 0.0027224 | 22 | 0.7924 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Becker, R.M.; Keefe, R.F. Prediction of Fuel Loading Following Mastication Treatments in Forest Stands in North Idaho, USA. Sustainability 2020, 12, 7025. https://doi.org/10.3390/su12177025
Becker RM, Keefe RF. Prediction of Fuel Loading Following Mastication Treatments in Forest Stands in North Idaho, USA. Sustainability. 2020; 12(17):7025. https://doi.org/10.3390/su12177025
Chicago/Turabian StyleBecker, Ryer M., and Robert F. Keefe. 2020. "Prediction of Fuel Loading Following Mastication Treatments in Forest Stands in North Idaho, USA" Sustainability 12, no. 17: 7025. https://doi.org/10.3390/su12177025
APA StyleBecker, R. M., & Keefe, R. F. (2020). Prediction of Fuel Loading Following Mastication Treatments in Forest Stands in North Idaho, USA. Sustainability, 12(17), 7025. https://doi.org/10.3390/su12177025