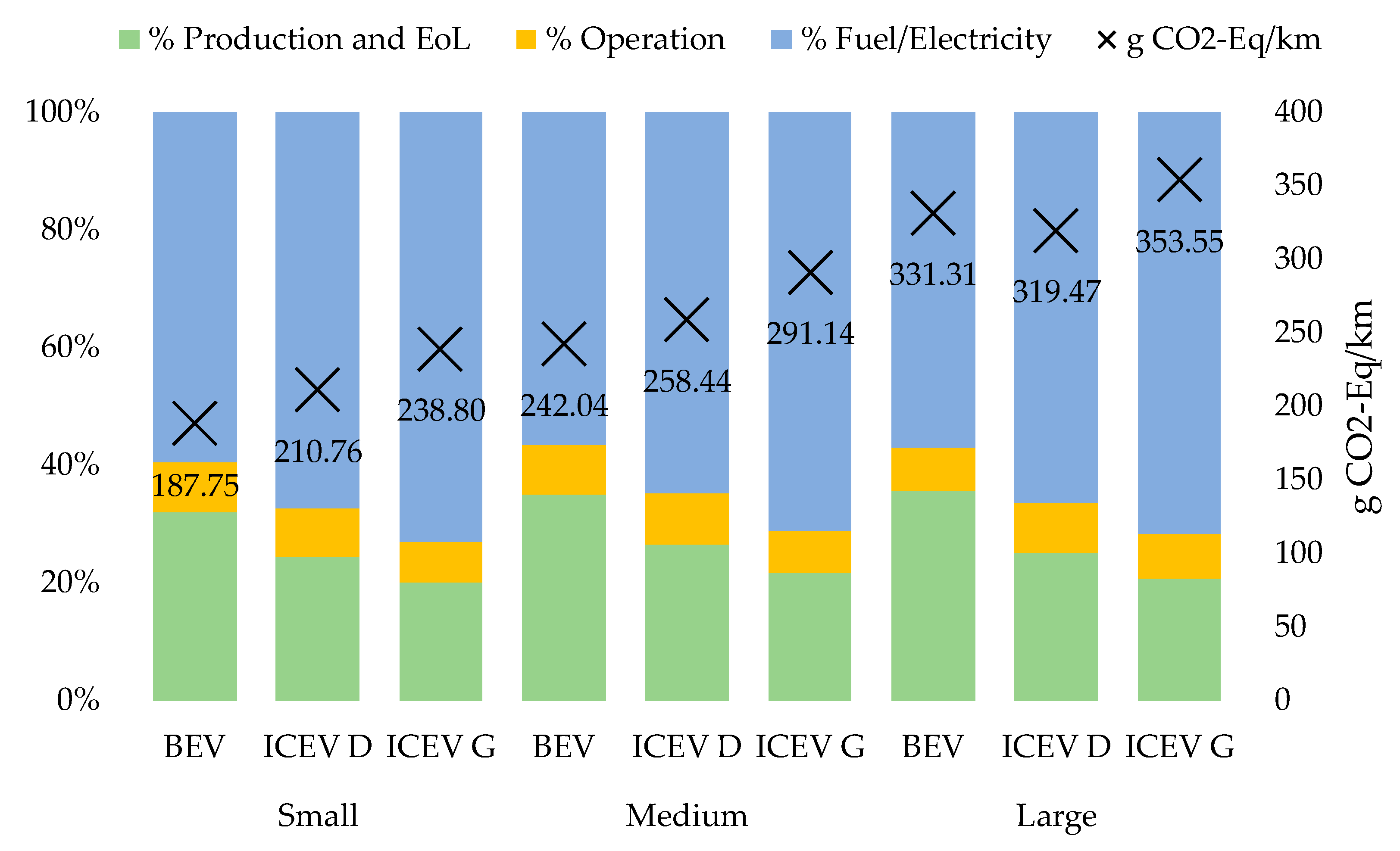
The considered cradle-to-gate life cycle of the vehicle includes production, use phase and end-of-life (EoL). We display the results on vehicle level and for Berlin’s whole MIT to enable comparisons within both. On the vehicle level, the functional unit represents one kilometer driven by the respective vehicle to match the results with other publications. On the MIT level, the functional unit displays one kilometer driven. Consequently, all vehicles (with different sizes) are factored within one coefficient.
Further specifications are explained in detail in the following section.
2.2.1. Inventory Analysis
We prepare a vehicle object, which contains several attributes to calculate the ecological impact for an agent-based transport simulation: the vehicle ID, the lifetime mileage, the shares of road categories, the drive train type, the consumption and, as dummies for the final results, the total LCA results, the kilometer-specific LCA results and the proportional LCA results. The MATSim simulation results contain the road network of the transport system, including the coordinates of the nodes of the network and the resulting links with the corresponding attributes. Additionally, all events of agents or vehicles are listed with time information [
35]. The vehicle identifier (ID) can be deduced directly by the results of the agent-based simulation.
The Open Berlin Scenario covers one average, synthetic day (see
Section 2.1.2). However, the entire lifetime mileage needs to be calculated for the assessment of the use phase in an LCA. Therefore, we extrapolate the single simulation day to a whole vehicle lifetime. On weekends, vehicles cover, on average, only 82% of their daily routes [
42]. Consequently, we assume five unmodified simulation days within one week and two modified simulation days with 82% of the daily mileage. Then, we scale this week to the average use phase duration of passenger cars in Germany. The average use phase duration is 12.6 years according to Helms et al. [
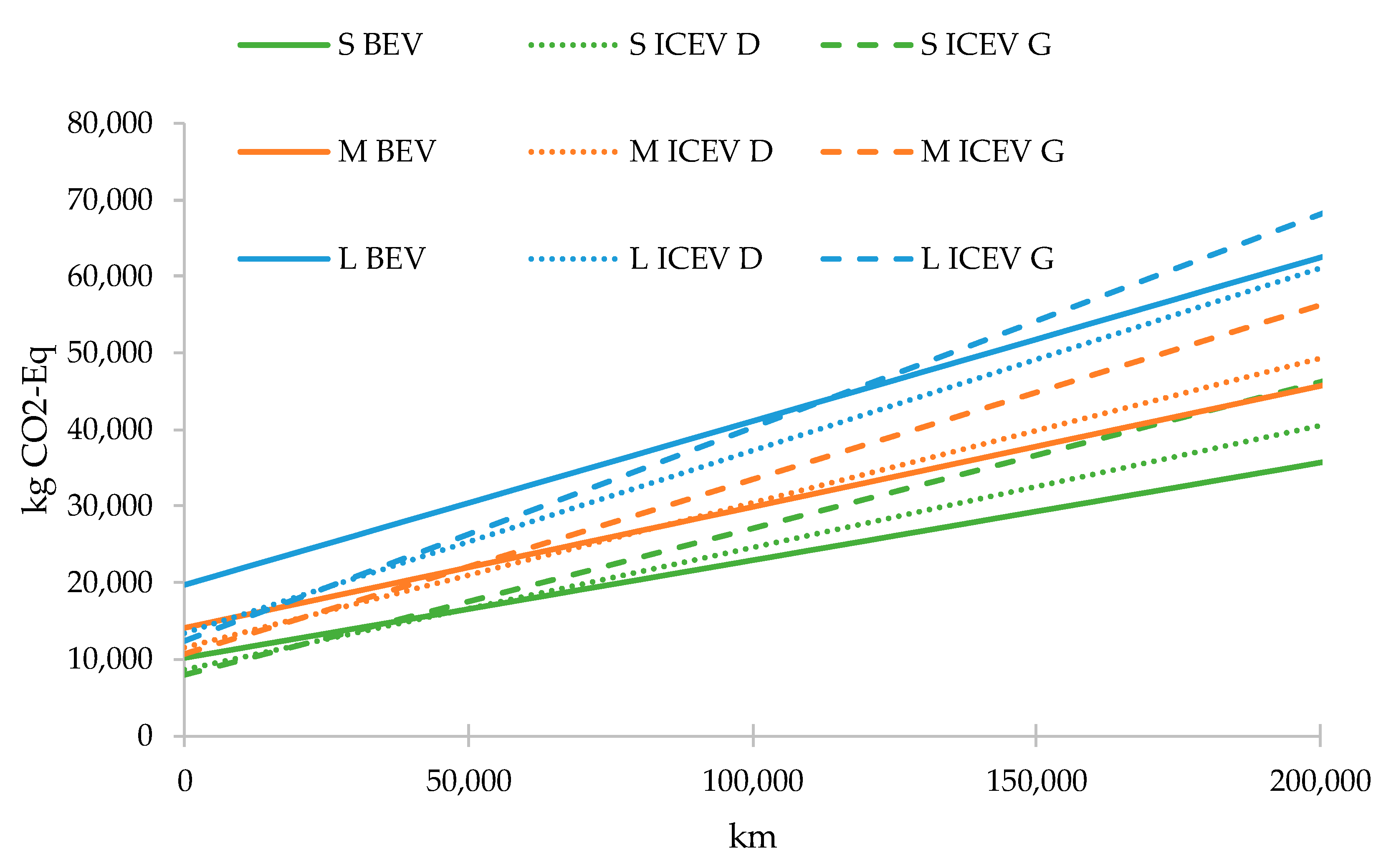
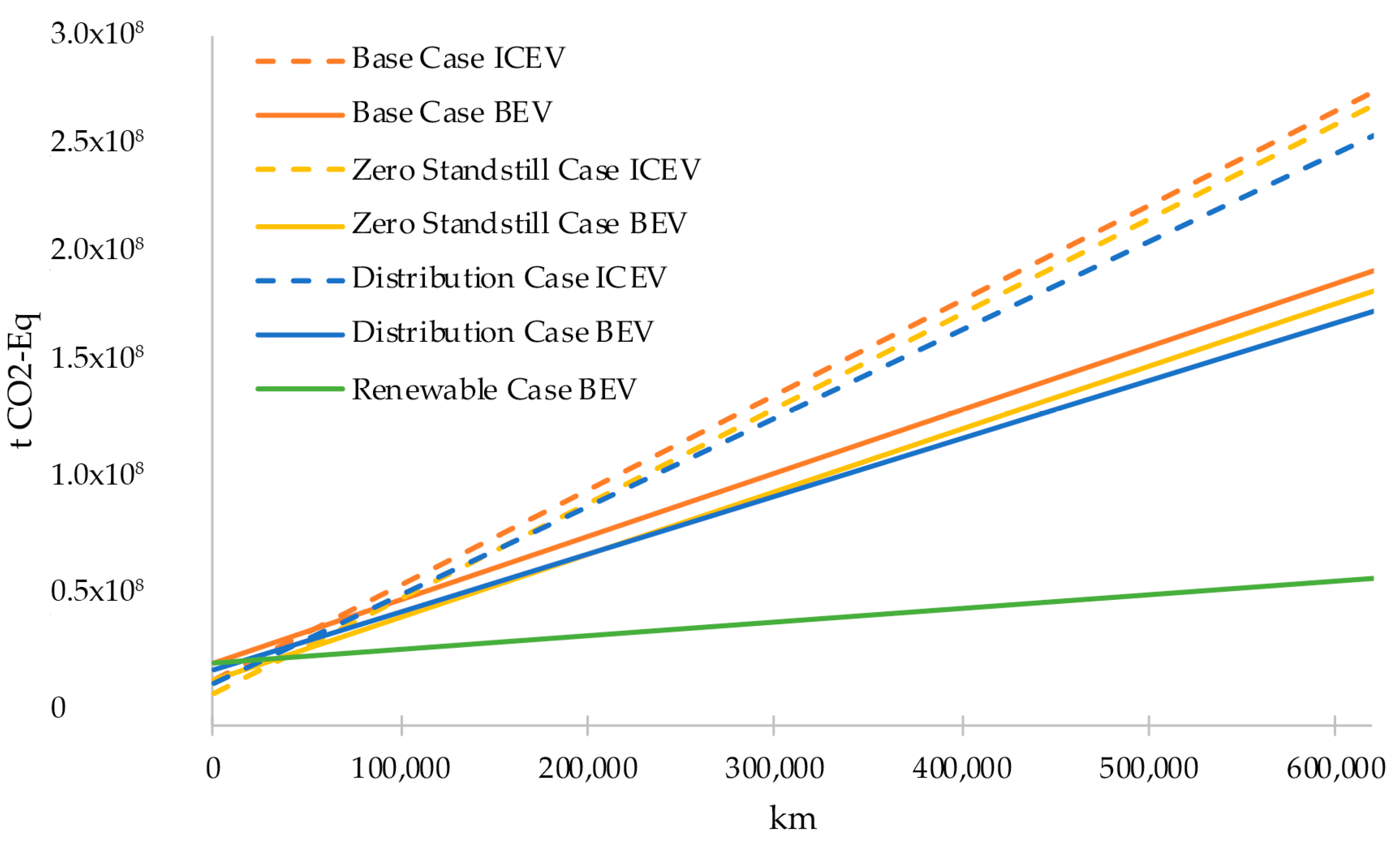
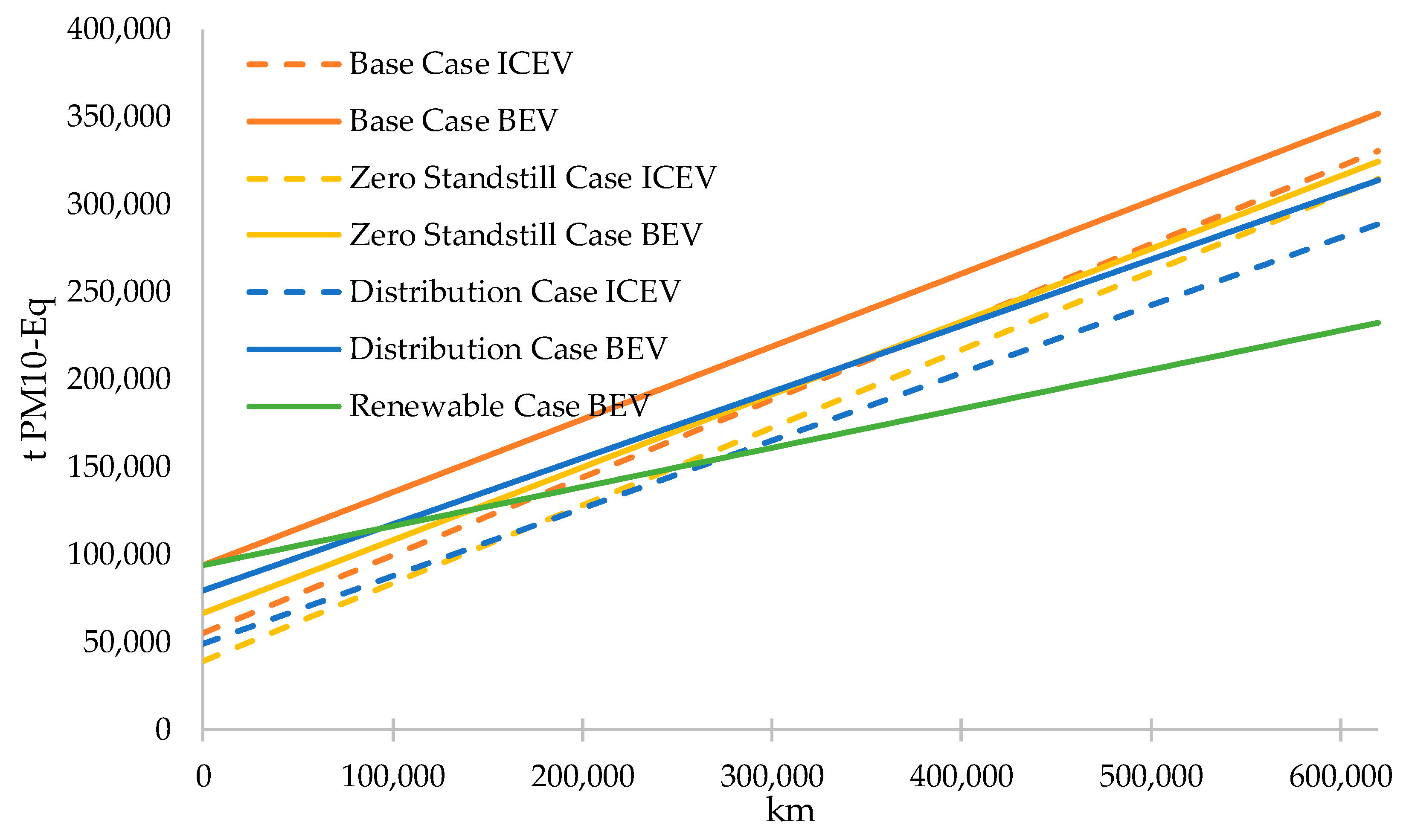
10]. This way, we obtain the vehicles’ average lifetime mileage: 206,396 km. We perform 100 additional calculations in which we scale the lifetime mileage between 0% to 300%. This results in an interval from 0 to 619,188 km. Only few vehicles might be able to reach a lifetime mileage of over 600,000 km. Nonetheless, this assumption enables the investigation of the influence of high lifetime mileages on vehicles’ LCA results.
Types of roads are urban and suburban roads as well as highways, which each differ in their respective free speeds, which are considered to calculate the respective consumption (
Table 1). The link-specific free speed is given by the simulation results (see
Section 2.1.2).
We define three vehicle classes to account for the variability of different vehicle segments and simultaneously limit the level of detail (like in [
43] and [
6], see
Table 2). The classification of the German vehicle segments to the vehicle classes of small, medium and large corresponds to the investigations in [
43]. We use the data sets from Ecoinvent version 3.6 for LCA [
20].
Both ICEVs and BEVs consist of the same vehicle body (chassis, steering, suspension, brakes, tires, interior and drive-independent electronic components) for the respective vehicle class to maintain comparability (like in [
10]). The corresponding Ecoinvent process “glider production, passenger car” is based on the inventory analysis of a Golf A4. According to Del Duce et al., the gasoline-fueled vehicle body has a share of 74% of the whole vehicle mass, diesel-fueled 69% and a BEV body without the battery has a share of 91% [
44]. With the vehicle weights (from [
43]) and the vehicle body and drive train shares, we calculate the mass for the respective vehicle size (
Table 3). The material composition of the vehicle classes mainly differs for the lightweight components [
45]. Therefore, we adapt aluminum and steel shares. According to [
10], the aluminum share of small vehicles is 20% lower than for medium-sized vehicles and for a large vehicle, it is 10% higher. We expect that the aluminum share of a medium-sized vehicle is 100% and change the values for small and large vehicles accordingly.
We adopt the respective Ecoinvent processes for the EoL of the vehicle bodies and drives. We adjust the material composition according to the production of the products. Some parts of aluminum, iron, copper, plastics and electric components are recyclable according to [
44]. The materials for production consist of secondary material [
10], the respective share is presented in
Table 4. We use the Ecoinvent cut-off system model for allocation [
20]. This means, in short, that recyclable materials are burden free for recycling processes and that the recycling process is allocated to the recycled materials.
We use the Ecoinvent process “internal combustion engine production, passenger car” as a basis for the drive train of the ICEV and scale it according to the shares of the diesel- and gasoline-fueled drive trains. This process includes the engines, the gears, the tanks, the air conditioning and the exhaust systems. As stated in [
10], the platinum and palladium contents in the ICEVs’ exhaust systems are considerably relevant in comparison to the BEV drive train. Helms et al. (2016) adjusted the contents according to the vehicle weights. Thus, we adapted the values for the respective vehicle classes and types (
Table 5).
The fuel consumption of the ICEVs is adopted from [
46] and categorized by urban roads, suburban roads and highways (
Table 1).
In Germany, fossil fuels contain biofuel components [
10]. We assumed that diesel consists of 8.7% rape seed oil and that petrol consists of bioethanol from wheat with a 5% share. Those fuels are supplied on the markets for fuel supply in Europe, which are deposited in Ecoinvent.
For the BEV drive train, we apply the process “powertrain, for electric passenger car”. It includes the motor, the charger, the power electronics, the converter and the inverter [
44]. We choose the battery capacities for the vehicle sizes small and medium according to [
45]. These capacities correspond to current vehicle models in the respective segments [
10]. We model the production of the battery with the Ecoinvent process “battery production, Li-ion, rechargeable, prismatic”. The data are provided by [
47]. We add a transport per ship from Beijing to Amsterdam and transport per truck of 1000 km within Europe for the batteries. Most electric vehicles in the vehicle class large are luxury cars. Consequently, we adjust this vehicle class with the specification of a Tesla Model S. The basic version has a battery with a 75 kWh capacity [
48]. The calculated vehicle mass is 100 kg heavier compared to the real vehicle, caused by the battery’s energy density and assuming the same vehicle bodies for all drive train types (
Table 3). We adopt the electricity consumption from [
45], for the vehicle classes small and medium (
Table 6). These include charging losses. For the vehicle class large, we use the consumption values based on [
48]. We assume a charging efficiency of 84% [
49] to reflect charging losses (
Table 6).
We use the German grid mix of the year 2018 to calculate the emissions of the BEV’s use phase. For this purpose, we adjust the Ecoinvent process “market for electricity, low voltage for Germany” (which in the current version v3.6 is based on the electricity mix of 2014) to the composition of gross electricity generation for 2018 estimated in [
50]. The above process is composed of electricity production at medium and high voltage levels, the transformation to the low voltage level (relevant for charging), transmission losses and other emissions within the transformation. The construction of the power plant and electricity grid infrastructure is included in the process as well. We deduct electricity exports from the distribution of gross electricity generation to calculate the shares of the individual energy sources in the electricity available in Germany. As reported in [
50], the exported electricity is based on the same electricity mix as the gross electricity generation. We include electricity imports, assuming the composition of the countries according to [
51]. The resulting electricity mix for 2018 is shown in
Table 7.
All energy sources except waste and photovoltaics (PVs) are entered at the high-voltage level, waste at the medium-voltage level and PVs at the low-voltage level. If there are several processes for one energy source (e.g., onshore and offshore for wind energy), we modify the corresponding Ecoinvent processes with the respective shares.
We perform additional calculations, assuming a share of 100% renewable energies in the German grid mix. A 100% renewable grid mix in Germany for the year 2050 is presented in [
52]. Accordingly, the adjusted grid mix contains of 30.4% PVs, 46.0% wind onshore and 23.6% wind offshore. This is an assumption for a theoretical renewable grid mix. For in-depth analysis of vehicles’ emissions in the year 2050, technological improvements have to be included. This is out of scope in this case study, but the here presented method enables the inclusion of future vehicle developments.
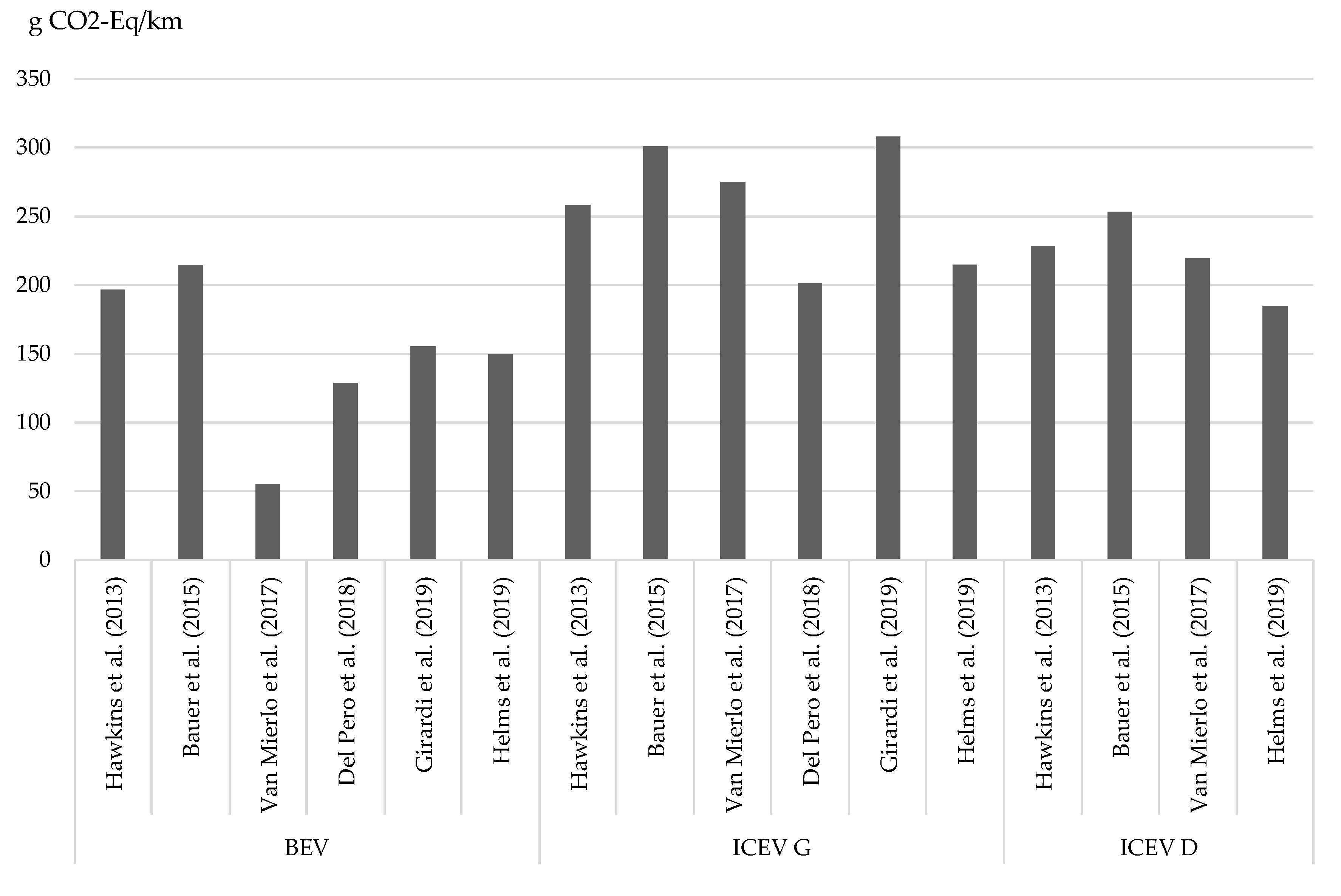
We perform an LCA for the generic vehicles, to compare the results with current research. Therefore, we apply the lifetime mileage and the road shares proposed by [
10]: 168.000 km and 30% urban road, 40% suburban road and 30% highway. The road shares with the respective consumption result in the average consumption for the vehicles (
Table 8). A broad spectrum of impact categories’ methods reduces the comparability. Therefore, we conduct studies which use similar methods (ReCiPe Midpoint). Nonetheless, this comparison is limited by different method versions (e.g., different year of publication).
On an average day in Berlin or Brandenburg, 40% or 23% of the passenger cars are idle [
53]. This results in a standstill of 29% for the region Berlin-Brandenburg, weighted according to the registered passenger cars (see
Section 2.1.1). As these vehicles are not represented in the MATSim simulation, we assume 29% additional vehicles with zero covered distance. Moreover, we prepare the results without the additional vehicles to demonstrate the influence of standstill.
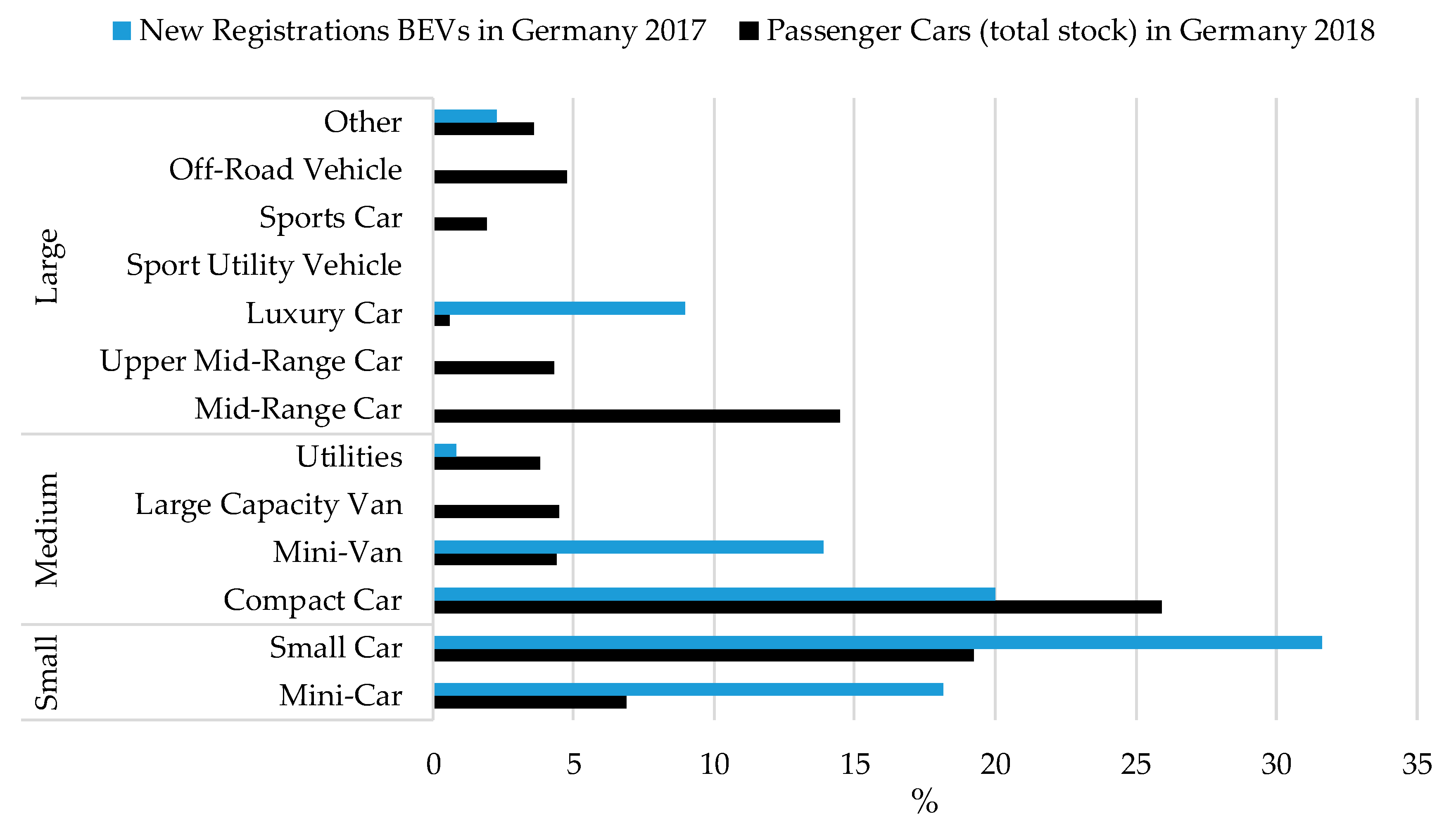
The MATSim simulation does (for now) not differentiate vehicle segments (e.g., mini-car) or size categories. Hence, the here defined vehicle classes must be assigned to the vehicles in the simulation. We convert the registered vehicles per vehicle segments (
Figure 3 and
Table 2) to the vehicle classes small, medium and large (
Table 9) and assign each vehicle in the MATSim simulation to one vehicle class and its respective attributes. For the ICEVs, we differentiate diesel- and gasoline-fueled vehicles. For further investigation of the vehicle distribution, we adjust the vehicle classes with the registration numbers of BEVs from 2017 (see
Section 2.1.1,
Table 9). We modify the BEV and ICEV distribution to display possible potentials of both technologies.
We modeled the direct emissions from the combustion (ICEV) based on the emissions from the corresponding processes (e.g., “transport, passenger car, medium size, diesel, EURO 5”) in Ecoinvent. The Ecoinvent data sets distinguish between consumption-dependent and -independent emissions. The independent emissions rest on the EURO 5 standard, but as the modeled vehicles in Ecoinvent are from 2010 and the consumption is based on a realistic drive cycle (EURO standards are based on driving cycles), the standards are exceeded [
54]. Therefore, we parameterize the independent and dependent emissions according to the consumption of the ICEV and the emission factors for biofuels as defined by [
55] (emission factors are −59 g CO
2-Eq./kWh for biodiesel and −52 g CO
2-Eq./kWh for bioethanol).
The abrasion of tires, brakes and roads is included using the Ecoinvent transport processes. The emissions are parameterized according to the vehicle weight. For the abrasion of BEV brakes, we assumed only 20% of the abrasion of ICEV brakes because of recuperation [
44].
The maintenance of the vehicles is included in the Ecoinvent maintenance processes for the respective drive trains, parameterized for the lifetime mileage and the vehicle weight. The maintenance process for BEVs relies on the process for ICEVs. All ICEV-specific tasks (e.g., oil changes) are deleted (like in [
44]). We discovered an unexplainable large amount of ethene as an output of the BEV process, which does not occur for the ICEV process. According to [
44] (and additional E-mail correspondence with the authors), the amount of ethene should be equal for the maintenance of BEVs and ICEVs. Therefore, we adjusted the corresponding processes.
Additionally, the construction of road infrastructure and production facilities is included depending on the vehicle weight.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}