Goal-Programming-Based Multi-Objective Optimization in Off-Grid Microgrids



Abstract
:1. Introduction
2. System Configuration and Multi-Objective Optimization
2.1. System Configuration
2.2. Multi-Objective Optimization and Goal Programming
3. Problem Formulation
3.1. Linear-Programming-Based Model
3.1.1. Objective Function
3.1.2. Battery Energy Storage System (BESS) Constraints
3.1.3. Electric Vehicles (EV) Constraints
3.1.4. Power Balancing Constraint
3.2. Goal-Programming-Based Model
3.2.1. BESS Degradation Goals
3.2.2. Load and Renewable Curtailment Goals
3.2.3. EV Degradation Goals
3.2.4. Goal-Programming-Based Objective Function Formulation
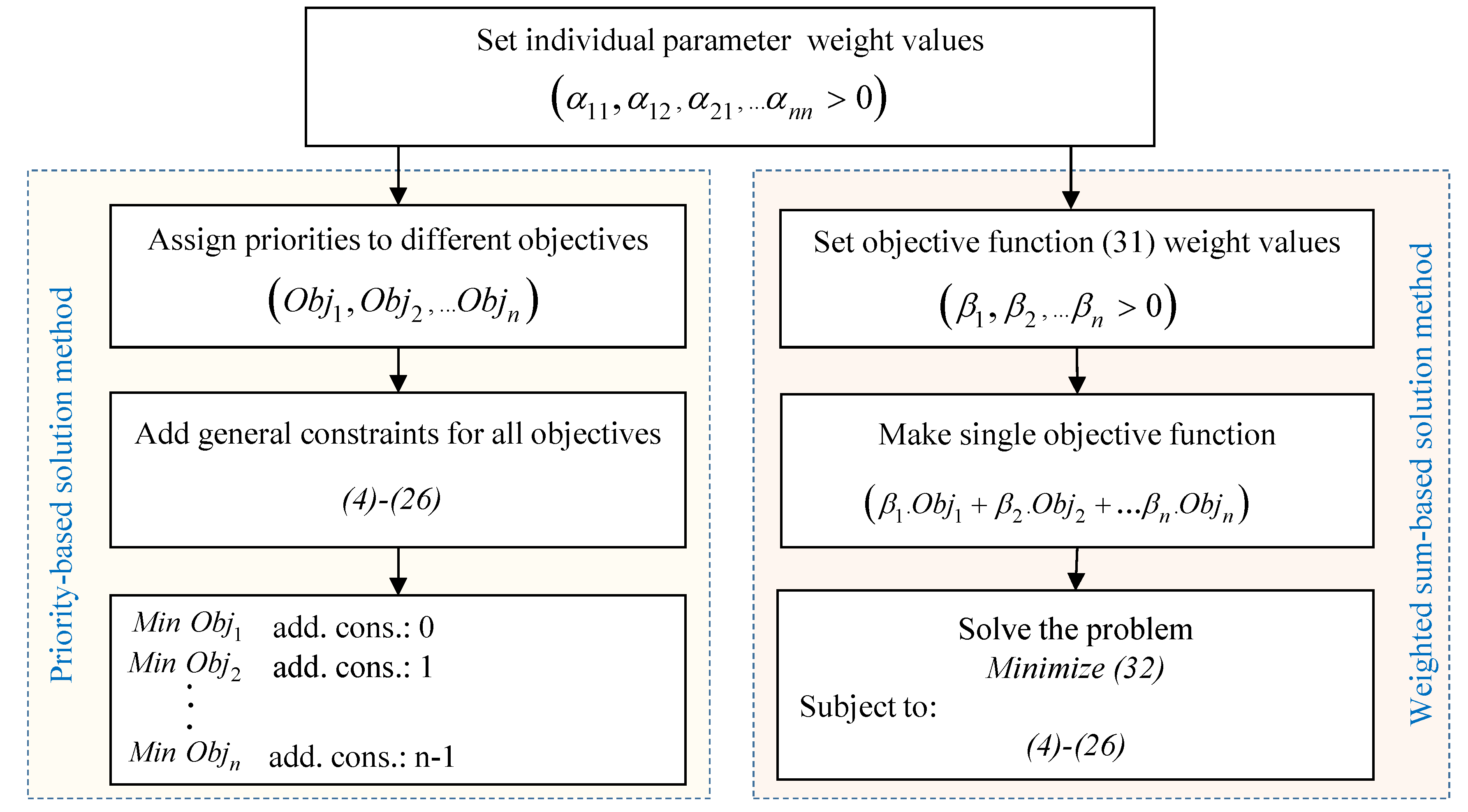
3.2.5. Weighted-Sum-Based Modeling Approach
3.2.6. Priority-Based Modeling Approach
4. Numerical Simulations
4.1. Input Data
4.2. Weighted-Sum Approach Results
4.3. Priority Approach Results
5. Discussion and Analysis
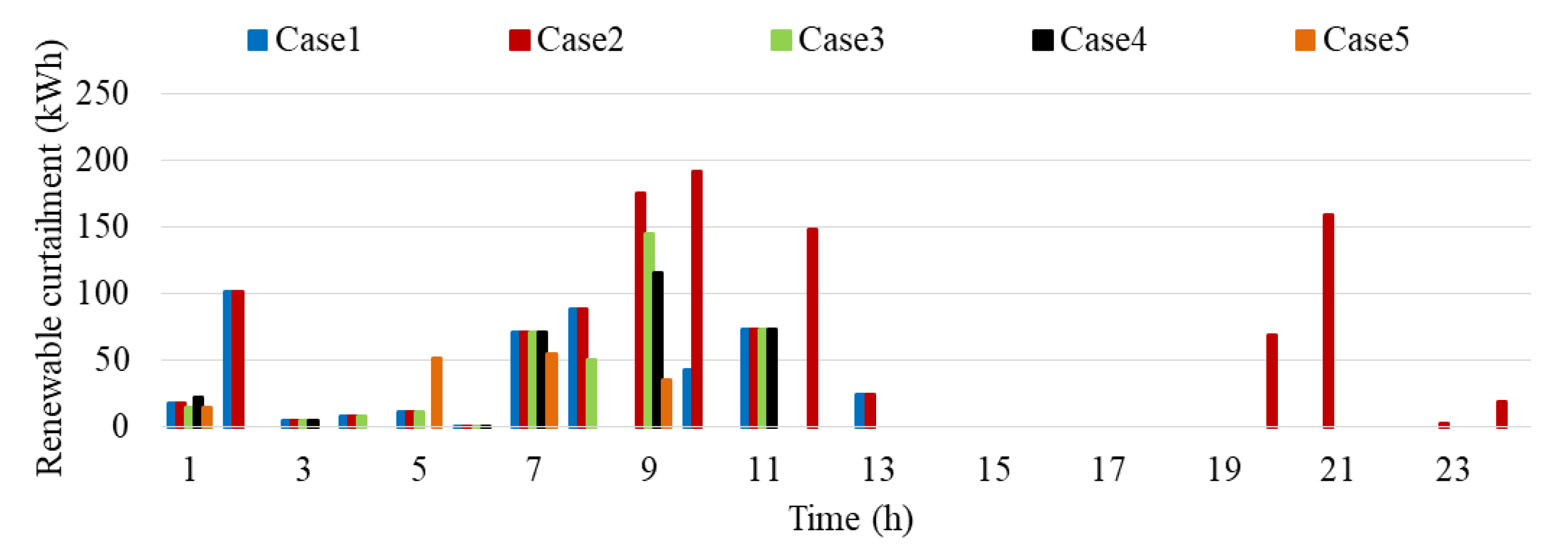
5.1. Impact of Weight Factor
5.2. Impact of Priority
5.3. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| BESS | Battery energy storage system |
| EMS | Energy management system |
| ESS | Energy storage system |
| EV | Electric vehicle |
| SOC | State-of-charge |
| Indices and binary variables | |
| Indicator for time interval, running from 1 to T | |
| Indicator for EVs, running from 1 to V | |
| Binary variable to avoid simultaneous occurrence of +ive and -ive deviations | |
| Variables and Parameters | |
| State-of-charge, used for BESS and EVs | |
| Amount of renewable power | |
| Amount of load | |
| Power amount | |
| Efficiency, used for BESS and EVs | |
| Deep discharging deviation, used in goal programming for BESS and EVs | |
| Overcharging deviation, used in goal programming for BESS and EVs | |
| Cycling frequency deviation, used in goal programming for BESS and EVs | |
| Renewable curtailment deviation, used in goal programming | |
| Load curtailment deviation, used in goal programming | |
| Scaler for defining precedence of individual parameter in an objective function | |
| Scaler for defining precedence of different objective functions | |
| Objective function | |
| Subscripts and Superscripts | |
| Minimum and maximum | |
| Curtailment, used for load and renewable | |
| Forecasted, used for load and renewable power | |
| Load and renewable | |
| Battery discharging and battery charging | |
| Capacity, used for BESS and EVs | |
| EV discharging and charging | |
| Electric vehicle and battery | |
| Target, used for SOC required by EVs before departure time | |
| Useable period of EVs (time between arrival and departure) and departure | |
| Upward and downward deviation, used for goal programming parameters | |
References
- Pischke, E.C.; Barry, S.; Adam, W.; Alberto, A.; Amarella, E.; Fernando, D.O.; Suani, C.; Lucon, O. From Kyoto to Paris: Measuring renewable energy policy regimes in Argentina, Brazil, Canada, Mexico and the United States. Energy Res. Social Sci. 2019, 50, 82–91. [Google Scholar] [CrossRef]
- Kumar, Y.; Jordan, R.; Soma, S.D.; Vijay, K.D.; Jin, W.L.; Efstratios, N.; Brett, A.; Abdollah, A. Wind energy: Trends and enabling technologies. Renew. Sustain. Energy Rev. 2016, 53, 209–224. [Google Scholar] [CrossRef]
- Vijay, D.; Mansoor, A.; Soma, S.S.R.D.; Robert, C.G., II; Douglas, N.; Craig, N. Solar energy: Trends and enabling technologies. Renew. Sustain. Energy Rev. 2013, 19, 555–564. [Google Scholar]
- Brent, A.C.; David, E.R. Renewable rural electrification: Sustainability assessment of mini-hybrid off-grid technological systems in the African context. Renew. Energy 2010, 35, 257–265. [Google Scholar] [CrossRef] [Green Version]
- Kanase-Patil, A.B.; Saini, R.P.; Sharma, M.P. Integrated renewable energy systems for off grid rural electrification of remote area. Renew. Energy 2010, 35, 1342–1349. [Google Scholar] [CrossRef]
- Amrouche, S.O.; Djamila, R.; Toufik, R.; Seddik, B. Overview of energy storage in renewable energy systems. Int. J. Hydrogen Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Mueller, O.M.; Eduard, K.M. Off-Grid, Low-Cost, Electrical Sun-Car System for Developing Countries. In Proceedings of the IEEE Global Humanitarian Technology Conference, San Jose, CA, USA, 10–13 October 2014; pp. 14–17. [Google Scholar]
- Chu, X.; Ge, Y.; Zhou, X.; Li, L.; Yang, D. Modeling and Analysis of Electric Vehicle-Power Grid-Manufacturing Facility (EPM) Energy Sharing System under Time-of-Use Electricity Tariff. Sustainability 2020, 12, 4836. [Google Scholar] [CrossRef]
- Krieger, E.M.; John, C.; Craig, B.A. A comparison of lead-acid and lithium-based battery behavior and capacity fade in off-grid renewable charging applications. Energy 2013, 60, 492–500. [Google Scholar] [CrossRef]
- An, K.; Song, K.B.; Hur, K. Incorporating charging/discharging strategy of electric vehicles into security-constrained optimal power flow to support high renewable penetration. Energies 2017, 10, 729. [Google Scholar] [CrossRef]
- Luo, Y.; Lin, S.; Guangyu, T. Optimal sizing and control strategy of isolated grid with wind power and energy storage system. Energy Conver. Manag. 2014, 80, 407–415. [Google Scholar] [CrossRef]
- Ashkan, Z.; Vijay, G. Minimizing Risk of Load Shedding and Renewable Energy Curtailment in a Microgrid with Energy Storage. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 3412–3417. [Google Scholar]
- Kerdphol, T.; Yaser, Q.; Yasunori, M. Battery Energy Storage System Size Optimization in microgrid Using Particle Swarm Optimization. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Istanbul, Turkey, 12–15 October 2014; pp. 1–6. [Google Scholar]
- Hussain, A.; Bui, V.H.; Kim, H.M. An effort-based reward approach for allocating load shedding amount in networked microgrids using multiagent system. IEEE Trans. Indust. Inform. 2020, 16, 2268–2279. [Google Scholar] [CrossRef]
- Astaneh, M.; Ramin, R.; Rodolfo, D.L.; José, L.B.A. A novel framework for optimization of size and control strategy of lithium-ion battery based off-grid renewable energy systems. Energy Conv. Manag. 2018, 175, 99–111. [Google Scholar] [CrossRef]
- Zhang, Y.; Jianxue, W.; Alberto, B.; Xiaoyu, C. Life cycle planning of battery energy storage system in off-grid wind–solar–diesel microgrid. IET Gen. Trans. Dist. 2018, 12, 4451–4461. [Google Scholar] [CrossRef]
- Cardoso, G.; Thomas, B.; Nicholas, D.F.; Dai, W.; Miguel, H.; Leander, K. Battery aging in multi-energy microgrid design using mixed integer linear programming. Appl. Energy 2018, 231, 1059–1069. [Google Scholar] [CrossRef]
- Zia, M.F.; Elhoussin, E.; Mohamed, B. Optimal operational planning of scalable DC microgrid with demand response, islanding, and battery degradation cost considerations. Appl. Energy 2019, 237, 695–707. [Google Scholar] [CrossRef]
- Bordin, C.; Harold, O.; Anuta, A.C.; Isabel, L.G.; Chris, J.D.; Daniele, V. A linear programming approach for battery degradation analysis and optimization in offgrid power systems with solar energy integration. Renew. Energy 2017, 101, 417–430. [Google Scholar] [CrossRef] [Green Version]
- Diaz, N.L.; Adriana, C.L.; Juan, C.V.; Josep, M.G. Centralized control architecture for coordination of distributed renewable generation and energy storage in islanded AC microgrids. IEEE Trans. Power Electron. 2016, 32, 5202–5213. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Michael, S.; Bailu, X.; Xiaohu, Z.; Kevin, T. Community microgrid Scheduling Considering Building Thermal Dynamics. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Ramos, M.A.; Marianne, B.; Ludovic, M.; Serge, D. Multiobjective optimization using goal programming for industrial water network design. Ind. Eng. Chem. Res. 2014, 53, 17722–17735. [Google Scholar] [CrossRef] [Green Version]
- Choi, S.H.; Hussain, A.; Kim, H.M. Adaptive robust optimization-based optimal operation of microgrids considering uncertainties in arrival and departure times of electric vehicles. Energies 2018, 11, 2646. [Google Scholar] [CrossRef] [Green Version]
- Chang, K.H. Multiobjective Optimization and Advanced Topics. In Design Theory and Methods Using CAD/CAE; Elsevier BV: Amsterdam, The Netherlands, 2015; pp. 325–406. [Google Scholar]
- Qahtani, H.A.; Ali, E.H.; Maha, M.E.A.; Aisha, F. A goal programming approach to multichoice multiobjective stochastic transportation problems with extreme value distribution. Adv. Oper. Res. 2019, 2019, 9714137. [Google Scholar] [CrossRef]
- Aghajani, G.; Noradin, G. Multi-objective energy management in a micro-grid. Energy Rep. 2018, 4, 218–225. [Google Scholar] [CrossRef]
- Hosseinnia, H.; Nazarpour, D.; Talavat, V. Multi-objective optimization framework for optimal planning of the microgrid (MG) under employing demand response program (DRP). J. Ambient Intell. Humaniz. Comput. 2019, 10, 2709–2730. [Google Scholar] [CrossRef]
- Wu, X.; Cao, W.; Wang, D.; Ding, M. A Multi-Objective optimization dispatch method for microgrid energy management considering the power loss of converters. Energies 2019, 12, 2160. [Google Scholar] [CrossRef] [Green Version]
- Pavol, S.; Michal, F.; Juraj, A.; Matus, D. Battery charging procedure proposal including regeneration of short-circuited and deeply discharged LiFePO4 traction batteries. Electronics 2020, 9, 929. [Google Scholar]
- Liu, J.; Jin, T.; Liu, L.; Chen, Y.; Yuan, K. Multi-objective optimization of a hybrid ess based on optimal energy management strategy for lhds. Sustainability 2017, 9, 1874. [Google Scholar]
- Hussain, A.; Bui, V.H.; Kim, H.M. A resilient and privacy-preserving energy management strategy for networked microgrids. IEEE Trans. Smart Grid 2016, 9, 2127–2139. [Google Scholar] [CrossRef]
- Electric Vehicle Database. Available online: https://ev-database.org/ (accessed on 1 October 2020).
- Energysage, LG Chem RESU. Available online: https://news.energysage.com/lg-chem-resu-battery-review/ (accessed on 1 October 2020).
- Apache NetBeans. Available online: https://netbeans.org/ (accessed on 1 October 2020).
- IBM. ILOG CPLEX V12.7 User’s Manual for CPLEX 2015, CPLEX Division; ILOG: Incline Village, NV, USA, 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Storage Element | Capacity (kWh) | Departure Time (h) | Arrival Time (h) | Efficiency (%) | SOC (%) | |||
|---|---|---|---|---|---|---|---|---|
| Initial | Min. | Max. | Target | |||||
| BESS | 750 | - | - | 95 | 20 | 20 | 80 | - |
| EV1 | 70 | 18 | 9 | 95 | 20 | 20 | 80 | 50 |
| EV2 | 60 | 20 | 8 | 93 | 20 | 20 | 80 | 50 |
| Cases | Weights | Priorities | ||||||
|---|---|---|---|---|---|---|---|---|
| Obj 1 | Obj 2 | Obj 3 | Obj 4 | Obj 1 | Obj 2 | Obj 3 | Obj 4 | |
| Case 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Case 2 | 4 | 1 | 3 | 2 | 4 | 1 | 3 | 2 |
| Case 3 | 3 | 4 | 2 | 1 | 3 | 4 | 2 | 1 |
| Case 4 | 1 | 4 | 1 | 1 | 4 | 3 | 2 | 1 |
| Case 5 | 1 | 20 | 1 | 1 | 4 | 3 | 1 | 1 |
| Cases | Load Curtailment | Renewable Curtailment | ||
|---|---|---|---|---|
| Amount (kWh) | Increase/Decrease (%) | Amount (kWh) | Increase/Decrease (%) | |
| Case 1 | 310 | 0.00% | 448.78 | 0.00% |
| Case 2 | 536 | 72.90% | 1173.47 | 161.46% |
| Case 3 | 73.94 | −76.15% | 382.25 | −14.82% |
| Case 4 | 14.66 | −95.27% | 288.88 | −35.63% |
| Case 5 | 0 | −100% | 157.27 | −64.96% |
| Cases | Load Curtailment | Renewable Curtailment | ||
|---|---|---|---|---|
| Amount (kWh) | Increase/Decrease (%) | Amount (kWh) | Increase/Decrease (%) | |
| Case 1 | 310 | 0.00% | 448.78 | 0.00% |
| Case 2 | 536 | 72.90% | 1173.36 | 161.46% |
| Case 3 | 0 | −100.00% | 124.36 | −72.29% |
| Case 4 | 96.31 | −68.93% | 325.72 | −27.42% |
| Case 5 | 96.31 | −68.93% | 325.72 | −27.42% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, A.; Kim, H.-M. Goal-Programming-Based Multi-Objective Optimization in Off-Grid Microgrids. Sustainability 2020, 12, 8119. https://doi.org/10.3390/su12198119
Hussain A, Kim H-M. Goal-Programming-Based Multi-Objective Optimization in Off-Grid Microgrids. Sustainability. 2020; 12(19):8119. https://doi.org/10.3390/su12198119
Chicago/Turabian StyleHussain, Akhtar, and Hak-Man Kim. 2020. "Goal-Programming-Based Multi-Objective Optimization in Off-Grid Microgrids" Sustainability 12, no. 19: 8119. https://doi.org/10.3390/su12198119
APA StyleHussain, A., & Kim, H. -M. (2020). Goal-Programming-Based Multi-Objective Optimization in Off-Grid Microgrids. Sustainability, 12(19), 8119. https://doi.org/10.3390/su12198119