Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach



Abstract
:1. Introduction
2. Related Work
2.1. Literature Review
2.2. Previous Studies
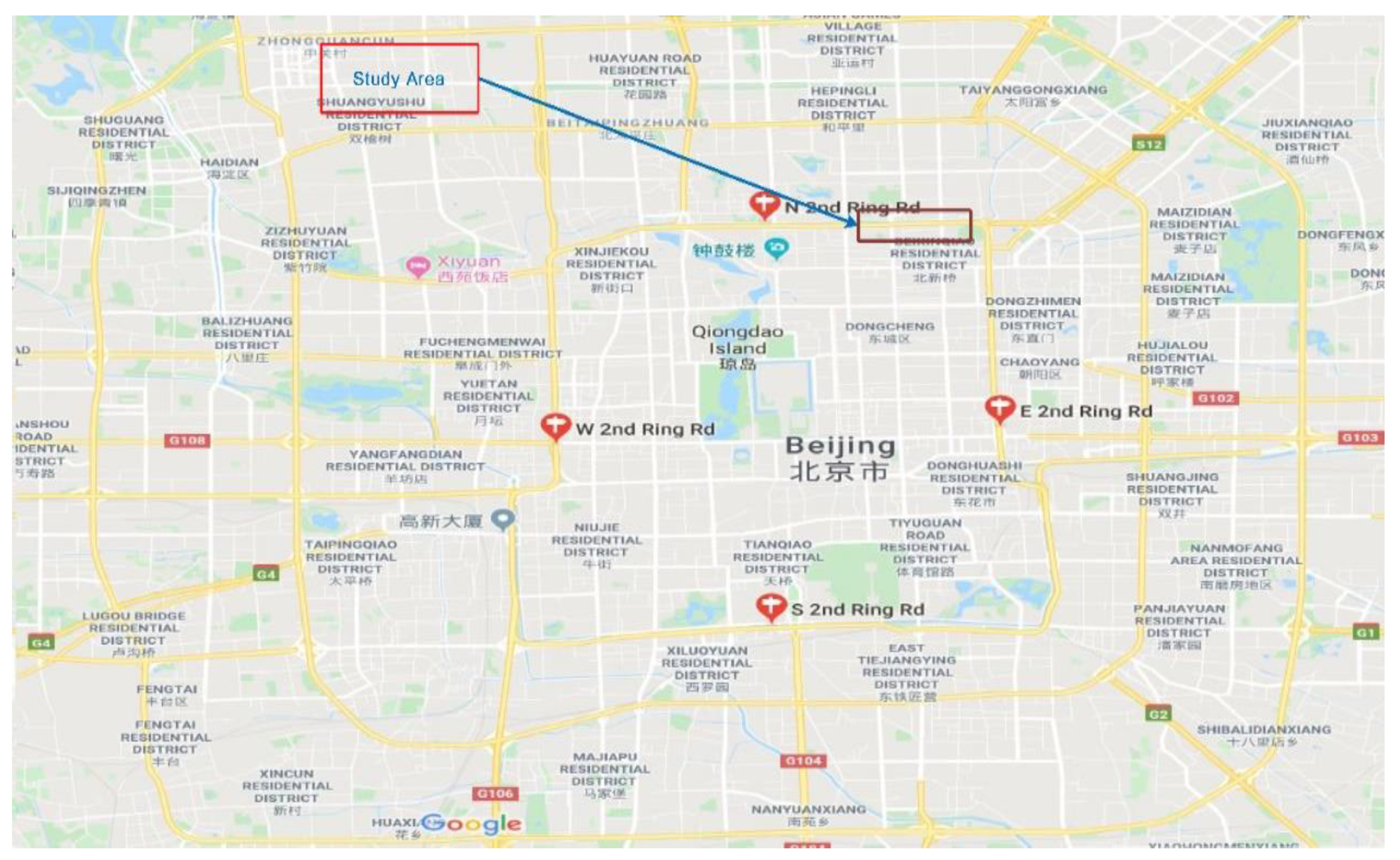
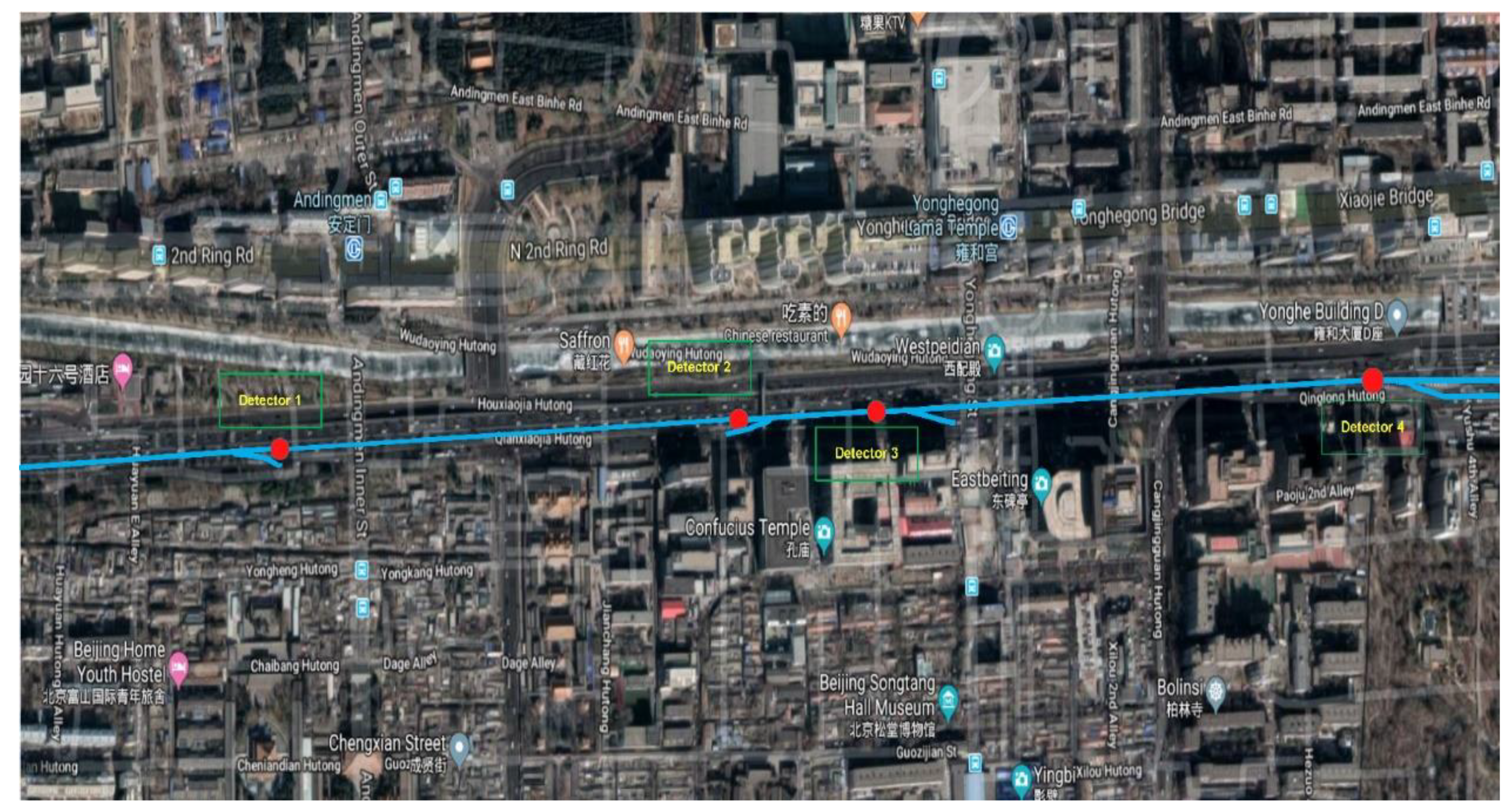
3. Data Collection and Parameters Settings
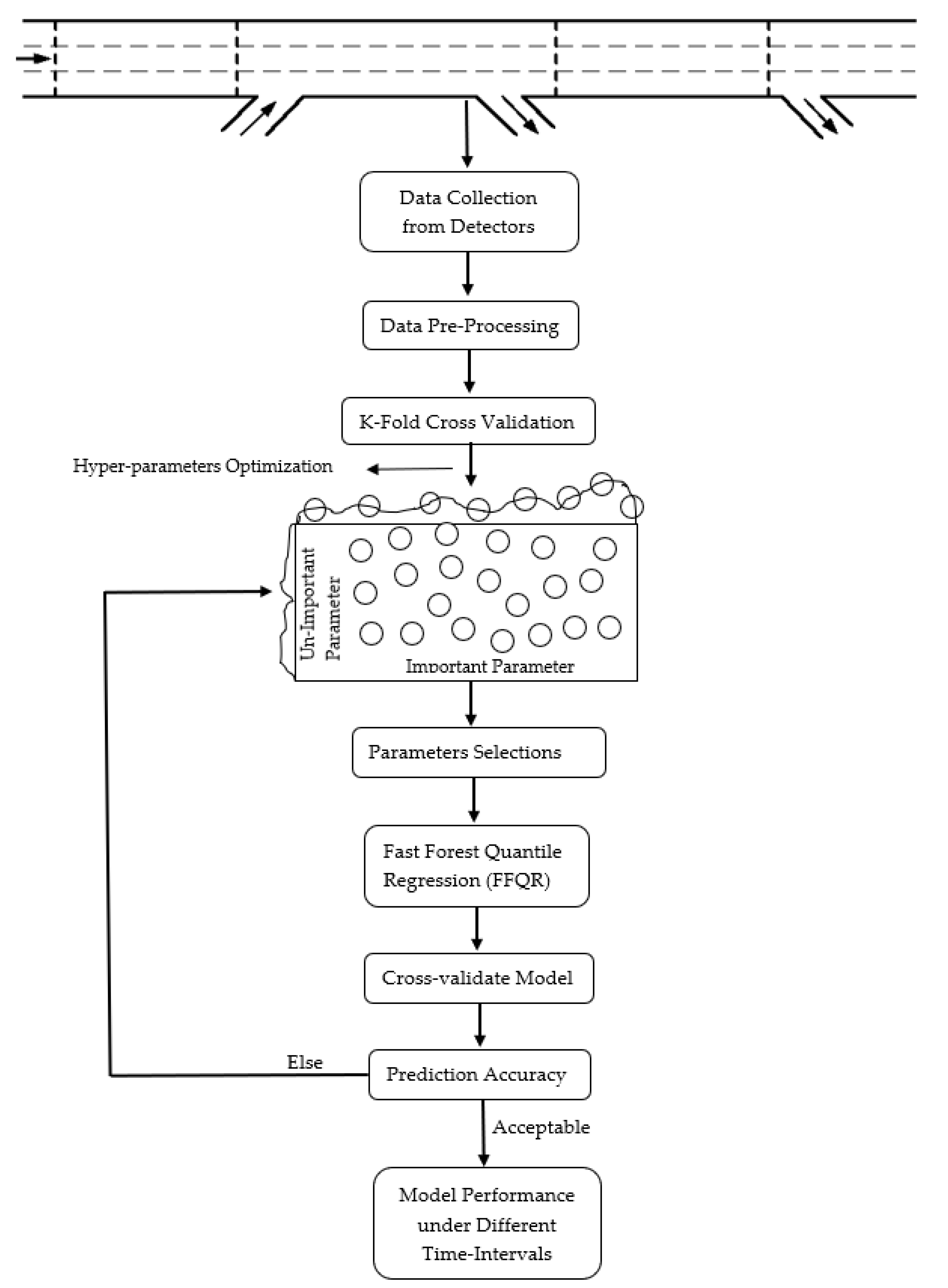
4. Methodology
4.1. Fast Forest Qunatile Regression
| Algorithm 1. Identification Algorithm |
|
4.2. Model Evaluation
5. Results and Discussion
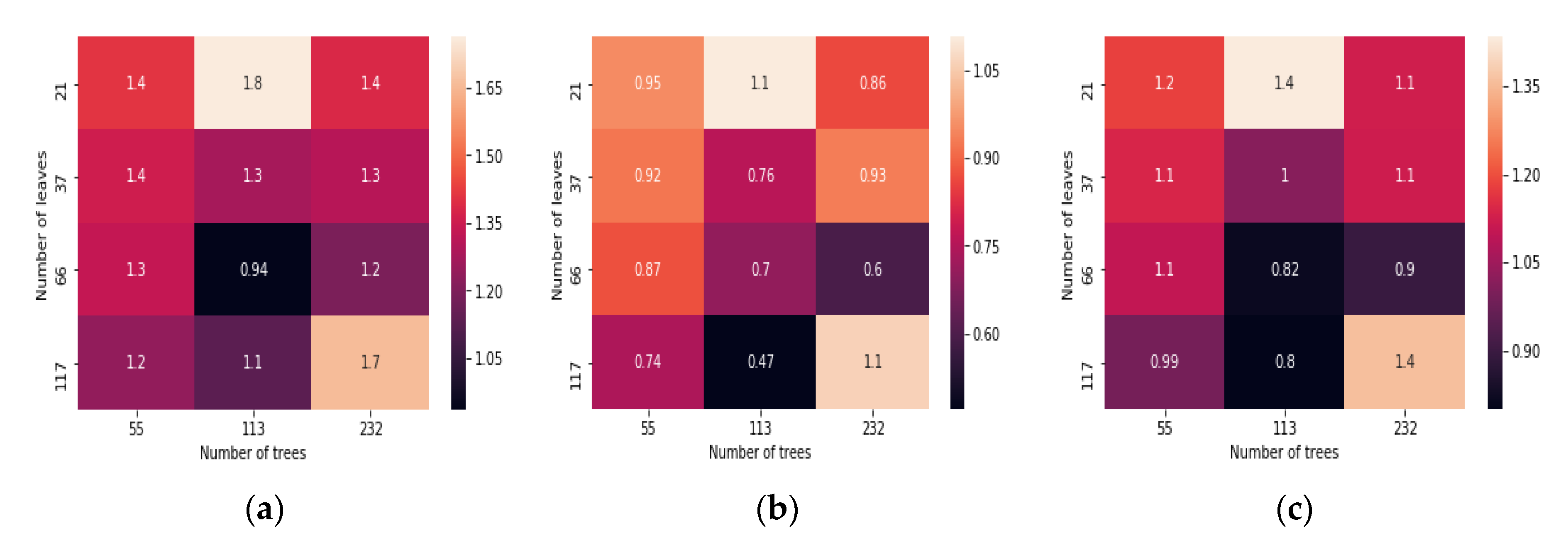
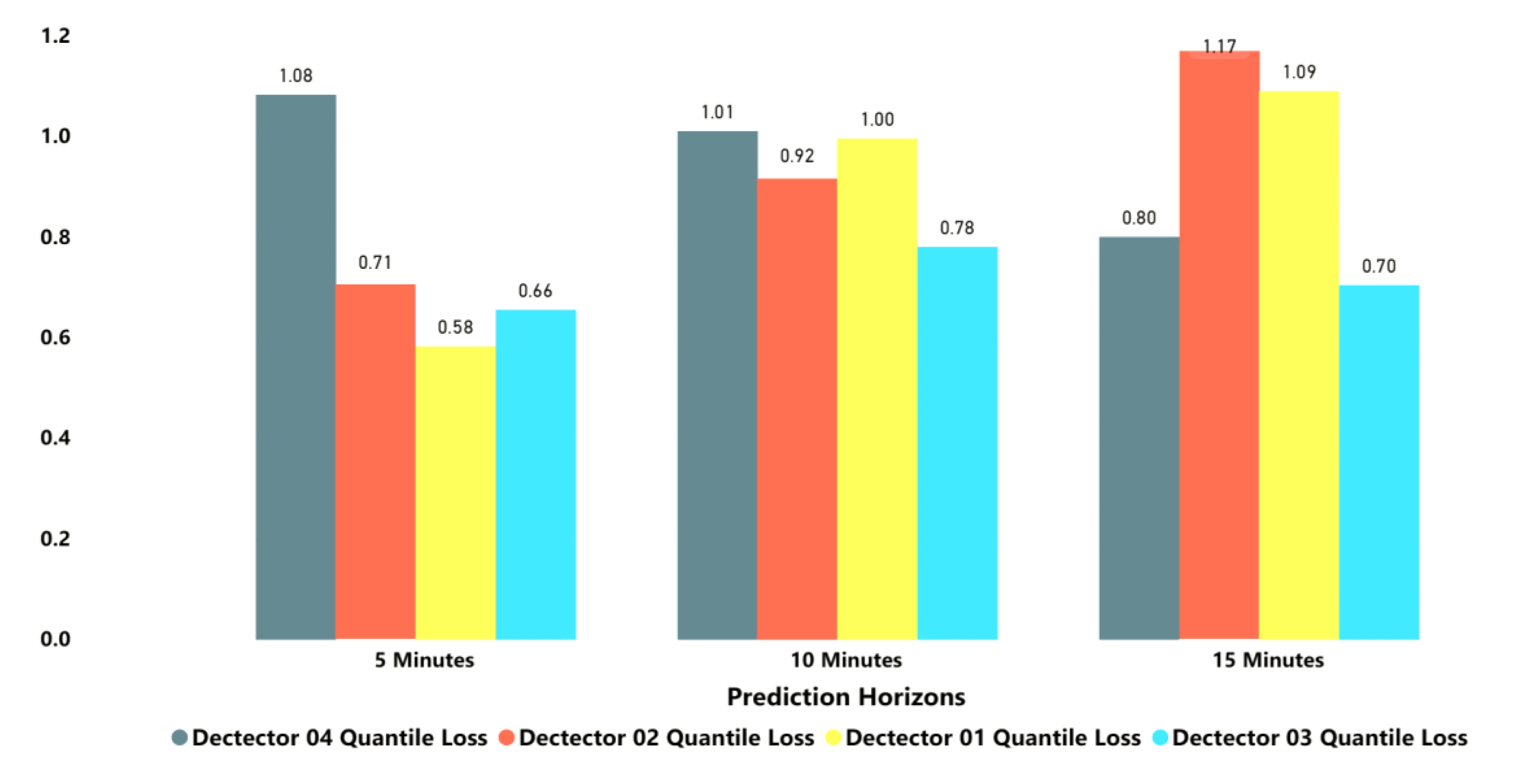
5.1. Quantile Loss for Different Time Horizon
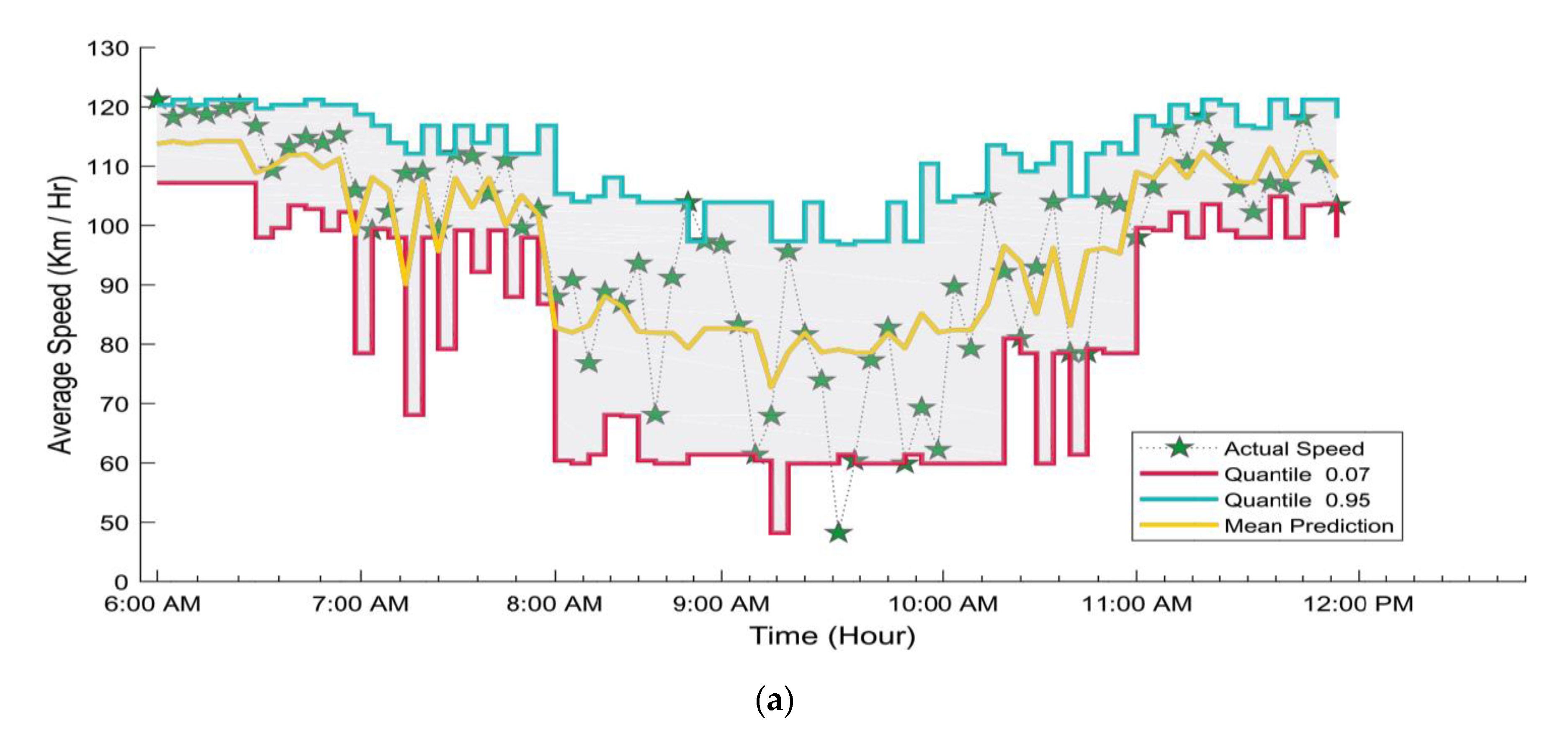
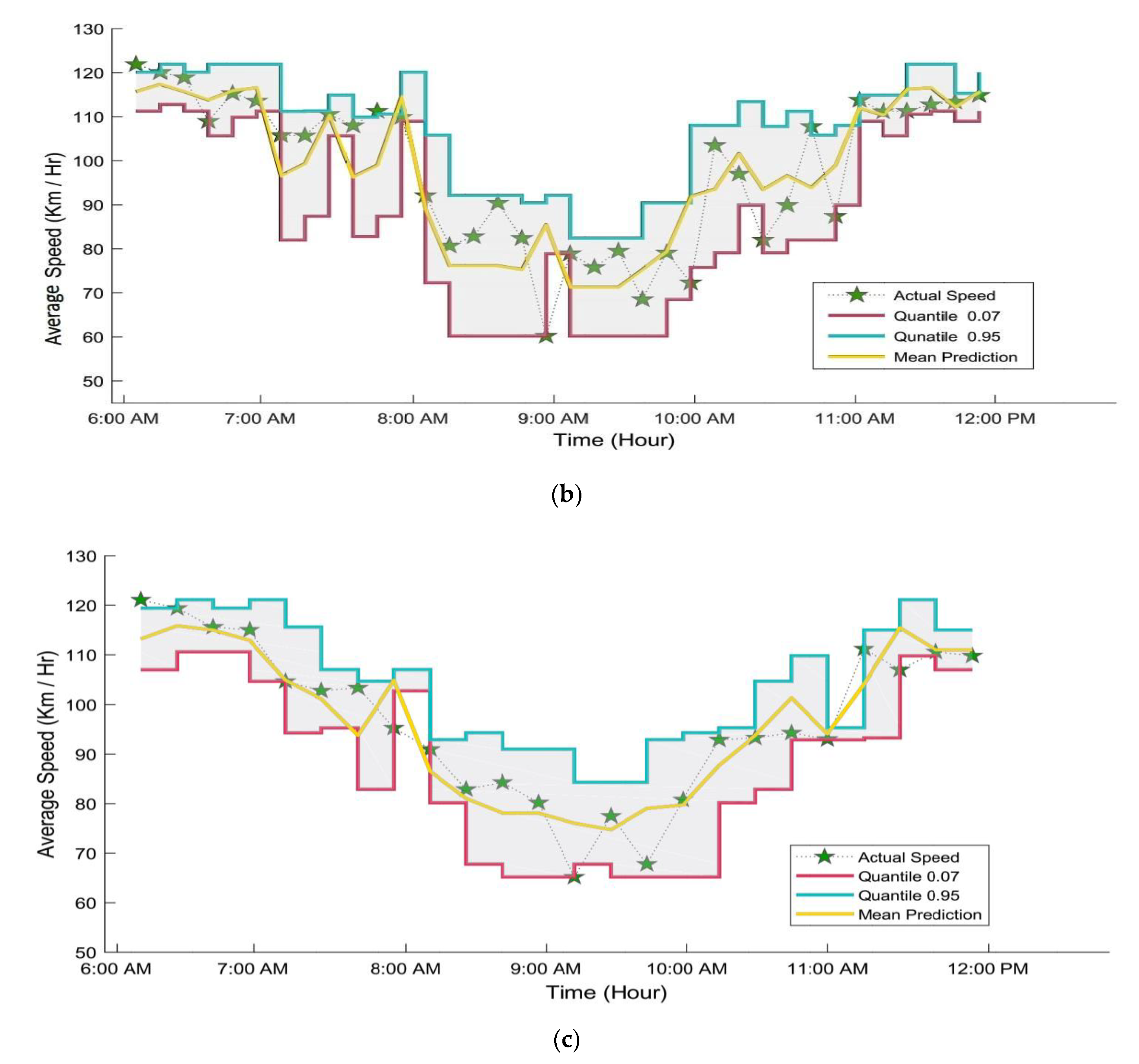
5.2. Model Perfrmance under Different Time Intervals
6. Conclusions, Study Limitations, and Future Work
6.1. Conclusions
6.2. Study Limitations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huang, Z.; Xia, J.; Li, F.; Li, Z.; Li, Q. A Peak Traffic Congestion Prediction Method Based on Bus Driving Time. Entropy 2019, 21, 709. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Triantis, K.P.; Sarangi, S. A framework for evaluating the dynamic impacts of a congestion pricing policy for a transportation socioeconomic system. Transp. Res. Part A Policy Pract. 2010, 44, 596–608. [Google Scholar] [CrossRef]
- Zheng, Y.; Capra, L.; Wolfson, O.; Yang, H. Urban Computing: Concepts, Methodologies, and Applications. ACM Trans. Intell. Syst. Technol. 2014. [Google Scholar] [CrossRef]
- Bani Younes, M.; Boukerche, A. A Performance Evaluation of an Efficient Traffic Congestion Detection Protocol (ECODE) for Intelligent Transportation Systems. Ad Hoc Netw. 2015, 24, 317–336. [Google Scholar] [CrossRef]
- Wang, M.Q.; Harvey, H. Chinese transport: achievements and challenges of transport policies. Mitig. Adapt. Strateg. Glob. Chang. 2015, 20, 623–626. [Google Scholar] [CrossRef]
- National Bureau of Statistics of China. China Statistical Yearbook 2019; National Bureau of Statistics of China: Beijing, China, 2019.
- Sachon, M.R.J.; Zhang, D.; Zhang, Y.; Castillo, C. The Chinese Automotive Industry in 2016; Universidad de Navarra: Pamplona, Spain, 2016. [Google Scholar]
- Levy, J.I.; Buonocore, J.J.; Stackelberg, K. von The Public Health Costs of Traffic Congestion A Health Risk Assessment. Environ. Heal. 2010, 9, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, J. Cities around the World: Struggles and Solutions to Urban Life [2 Volumes]; ABC-CLIO: Santa Barbara, CA, USA, 2019; ISBN 144085386X. [Google Scholar]
- Kim, Y.; Kang, W.; Park, M. Application of Traffic State Prediction Methods to Urban Expressway Network in the City of Seoul. J. East. Asia Soc. Transp. Stud. 2015, 11, 1885–1898. [Google Scholar]
- Mannini, L.; Carrese, S.; Cipriani, E.; Crisalli, U. On the Short-term Prediction of Traffic State: An Application on Urban Freeways in ROME. Transp. Res. Procedia 2015, 10, 176–185. [Google Scholar] [CrossRef]
- Long, K.; Yao, W.; Gu, J.; Wu, W.; Han, L.D. Predicting freeway travel time using multiple-source heterogeneous data integration. Appl. Sci. 2018, 9, 104. [Google Scholar] [CrossRef] [Green Version]
- Gmira, M.; Gendrea, M.; Lodi, A.; Jean-Yves Potvin, M. Travel Speed Prediction Based on Learning Methods for Home Delivery; Canada Excellence Research Chairs (CERC): Montréal, QC, Canada, 2018. [Google Scholar]
- Dauwels, J.; Aslam, A.; Asif, M.T.; Zhao, X.; Vie, N.M.; Cichocki, A.; Jaillet, P. Predicting traffic speed in urban transportation subnetworks for multiple horizons. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 547–552. [Google Scholar]
- Ishak, S.; Al-Deek, H. Performance evaluation of short-term time-series traffic prediction model. J. Transp. Eng. 2002, 128, 490–498. [Google Scholar] [CrossRef]
- Sun, H.; Liu, H.X.; Xiao, H.; He, R.R.; Ran, B. Use of local linear regression model for short-term traffic forecasting. Transp. Res. Rec. 2003, 1836, 143–150. [Google Scholar] [CrossRef]
- Zhang, S.; Yao, Y.; Hu, J.; Zhao, Y.; Li, S.; Hu, J. Deep autoencoder neural networks for short-term traffic congestion prediction of transportation networks. Sensors (Switzerland) 2019, 19, 2229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, J.; Li, D.; Murphey, Y.L.; Kristinsson, J.; McGee, R.; Kuang, M.; Phillips, T. Real time vehicle speed prediction using a neural network traffic model. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2991–2996. [Google Scholar]
- Jiang, H.; Zou, Y.; Zhang, S.; Tang, J.; Wang, Y. Short-term speed prediction using remote microwave sensor data: machine learning versus statistical model. Math. Probl. Eng. 2016, 2006. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Liu, H.X.; Xiao, H.; He, R.R.; Ran, B. Short term traffic forecasting using the local linear regression model. In Proceedings of the 82nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003. [Google Scholar]
- Van Hinsbergen, C.P.; Van Lint, J.W.; Sanders, F.M. Short term traffic prediction models. In Proceedings of the 14th World Congress on Intelligent Transport Systems (ITS), Beijing, China, 9–13 October 2007. [Google Scholar]
- Pan, T.L.; Sumalee, A.; Zhong, R.-X.; Indra-Payoong, N. Short-term traffic state prediction based on temporal–spatial correlation. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1242–1254. [Google Scholar] [CrossRef]
- Jamal, A.; Rahman, M.T.; Al-ahmadi, H.M. The Dilemma of Road Safety in the Eastern Province of Saudi Arabia: Consequences and Prevention Strategies. Int. J. Environ. Res. Public Helath 2019, 17, 157. [Google Scholar] [CrossRef] [Green Version]
- Avineri, E.; Prashker, J.N. The impact of travel time information on travelers’ learning under uncertainty. Transportation (Amst) 2006, 33, 393–408. [Google Scholar] [CrossRef]
- Zheng, F.; Van Zuylen, H. Uncertainty and Predictability of Urban Link Travel Time: Delay Distribution–Based Analysis. Transp. Res. Rec. 2010, 2192, 136–146. [Google Scholar] [CrossRef]
- Noland, R.; Small, K.A. Travel-time uncertainty, departure time choice, and the cost of morning commutes. Transp. Res. Rec. 1995, 150–158. [Google Scholar]
- Zhu, D.; Shen, G.; Liu, D.; Chen, J.; Zhang, Y. FCG-aspredictor: An approach for the prediction of average speed of road segments with floating car GPS data. Sensors (Switzerland) 2019, 19, 4967. [Google Scholar] [CrossRef] [Green Version]
- Anil Rao, Y.G.; Sujith Kumar, N.; Amaresh, H.S.; Chirag, H.V. Real-time speed estimation of vehicles from uncalibrated view-independent traffic cameras. In Proceedings of the IEEE Region 10 Annual International Conference, TENCON 2015, Macao, China, 1–4 November 2015. [Google Scholar]
- Yu, D.; Liu, C.; Wu, Y.; Liao, S.; Anwar, T.; Li, W.; Zhou, C. Forecasting short-term traffic speed based on multiple attributes of adjacent roads. Knowl-Based Syst. 2019, 163, 472–484. [Google Scholar] [CrossRef]
- Siuhi, S.; Mwakalonge, J. Opportunities and challenges of smart mobile applications in transportation. J. Traffic Transp. Eng. (English Ed.) 2016, 3, 582–592. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Prevedouros, P.D. Performance and Challenges in Utilizing Non-Intrusive Sensors for Traffic Data Collection. Adv. Remote Sens. 2013, 2, 45–50. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Zhang, J.; He, S.; Wang, W.; Zhan, F. Accuracy Analysis of Freeway Traffic Speed Estimation Based on the Integration of Cellular Probe System and Loop Detectors. J. Intell. Transp. Syst. Technol. Plan. Oper. 2015, 19, 411–426. [Google Scholar] [CrossRef]
- Katsuki, T.; Morimura, T.; Inoue, M. Traffic Velocity Estimation from Vehicle Count Sequences. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1700–1712. [Google Scholar] [CrossRef]
- Deng, B.; Denman, S.; Zachariadis, V.; Jin, Y. Estimating traffic delays and network speeds from low-frequency GPS taxis traces for urban transport modelling. Eur. J. Transp. Infrastruct. Res. 2015, 15, 639–661. [Google Scholar]
- Dendrinos, D.S. Traffic-flow dynamics: A search for chaos. Chaos Solitons Fract. 1994, 4, 605–617. [Google Scholar] [CrossRef]
- Seo, T.; Bayen, A.M.; Kusakabe, T.; Asakura, Y. Traffic state estimation on highway: A comprehensive survey. Annu. Rev. Control 2017, 43, 128–151. [Google Scholar] [CrossRef] [Green Version]
- Bergstra, J.; Bardenet, R.; Bengio, Y.; Kégl, B. Algorithms for hyper-parameter optimization. In Proceedings of the Advances in Neural Information Processing Systems 24: 25th Annual Conference on Neural Information Processing Systems, Granada, Spain, 12–14 December 2011. [Google Scholar]
- van Hinsbergen, C.P.I.; van Lint, J.W.C.; van Zuylen, H.J. Bayesian committee of neural networks to predict travel times with confidence intervals. Transp. Res. Part C Emerg. Technol. 2009, 17, 498–509. [Google Scholar] [CrossRef]
- Kumar, S.V.; Vanajakshi, L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data. Eur. Transp. Res. Rev. 2015, 7, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M.S.; Cook, A.R. Analysis of Freeway Traffic Time-Series Data By Using Box-Jenkins Techniques. Transp. Res. Rec. 1979, 722, 1–9. [Google Scholar]
- Ross, P. Exponential filtering of traffic data. Transp. Res. Rec. 1982, 869, 43–49. [Google Scholar]
- Zhang, Y.; Zhang, Y.; Haghani, A. A hybrid short-term traffic flow forecasting method based on spectral analysis and statistical volatility model. Transp. Res. Part C Emerg. Technol. 2014, 43, 65–78. [Google Scholar] [CrossRef]
- Tchrakian, T.T.; Basu, B.; O’Mahony, M. Real-time traffic flow forecasting using spectral analysis. IEEE Trans. Intell. Transp. Syst. 2012, 13, 519–526. [Google Scholar] [CrossRef]
- Levin, M.; Tsao, Y.-D. On forecasting freeway occupancies and volumes (abridgment). Transp. Res. Rec. 1980, 722, 47–49. [Google Scholar]
- Nihan, N.; Holmesland, K. Use of the Box and Jekins Time Series Technique in Traffic Forecatsing. Transportation (Amst) 1980, 9, 125–143. [Google Scholar] [CrossRef]
- Karlaftis, M.G.; Vlahogianni, E.I. Memory properties and fractional integration in transportation time-series. Transp. Res. Part C Emerg. Technol. 2009, 17, 444–453. [Google Scholar] [CrossRef]
- der Voort, M.; Dougherty, S.W. Combining Kohen Maps with Arima Time Series Models to Forecats Traffic Flow. Transp. Res. Part C Emerg. Technol. 1996, 5, 307–318. [Google Scholar] [CrossRef] [Green Version]
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Lippi, M.; Bertini, M.; Frasconi, P. Short-term traffic flow forecasting: An experimental comparison of time-series analysis and supervised learning. IEEE Trans. Intell. Transp. Syst. 2013, 14, 871–882. [Google Scholar] [CrossRef]
- Dunne, S.; Ghosh, B. Regime-based short-term multivariate traffic condition forecasting algorithm. J. Transp. Eng. 2012, 138, 455–466. [Google Scholar] [CrossRef]
- Chan, K.Y.; Dillon, T.S.; Singh, J.; Chang, E. Neural-network-based models for short-term traffic flow forecasting using a hybrid exponential smoothing and levenberg-marquardt algorithm. IEEE Trans. Intell. Transp. Syst. 2012, 13, 644–654. [Google Scholar] [CrossRef]
- Huang, S.-H.; Ran, B. An Application of Neural Network on Traffic Speed Prediction Under Adverse Weather Condition. In Proceedings of the 82nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003; pp. 1–21. [Google Scholar]
- Chen, H.; Grant-Muller, S. Use of sequential learning for short-term traffic flow forecasting. Transp. Res. Part C Emerg. Technol. 2001, 9, 319–336. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning traffic as images: A deep convolutional neural network for large-scale transportation network speed prediction. Sensors (Switzerland) 2017, 17, 818. [Google Scholar] [CrossRef] [Green Version]
- El Faouzi, N.-E. Nonparametric traffic flow prediction using kernel estimator. In Proceedings of the Transportation and Traffic Theory. In Proceedings of the 13th International Symposium on Transportation and Traffic Theory, Lyon, France, 24–26 July 1996. [Google Scholar]
- Habtemichael, F.G.; Cetin, M. Short-term traffic flow rate forecasting based on identifying similar traffic patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Davis, B.G.A.; Member, A.; Nihan, N.L. Nonparametric regression and short-term freeway traffic forecasting. J. Transp. Eng. 1991, 117, 178–188. [Google Scholar] [CrossRef]
- Jeong, Y.S.; Byon, Y.J.; Castro-Neto, M.M.; Easa, S.M. Supervised weighting-online learning algorithm for short-term traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1700–1707. [Google Scholar] [CrossRef]
- Yao, B.; Chen, C.; Cao, Q.; Jin, L.; Zhang, M.; Zhu, H.; Yu, B. Short-Term Traffic Speed Prediction for an Urban Corridor. Comput. Civ. Infrastruct. Eng. 2017, 32, 154–169. [Google Scholar] [CrossRef]
- Zheng, W.; Lee, D.H.; Shi, Q. Short-term freeway traffic flow prediction: Bayesian combined neural network approach. J. Transp. Eng. 2006, 132, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Dimitriou, L.; Tsekeris, T.; Stathopoulos, A. Adaptive hybrid fuzzy rule-based system approach for modeling and predicting urban traffic flow. Transp. Res. Part C Emerg. Technol. 2008, 16, 554–573. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y. Traffic forecasting using least squares support vector machines. Transportmetrica 2009, 5, 193–213. [Google Scholar] [CrossRef]
- Chen, X.Y.; Pao, H.K.; Lee, Y.J. Efficient traffic speed forecasting based on massive heterogenous historical data. In Proceedings of the 2014 IEEE International Conference on Big Data, Washington, DC, USA, 27–30 October 2014; pp. 10–17. [Google Scholar]
- Wang, J.; Shi, Q. Short-term traffic speed forecasting hybrid model based on Chaos-Wavelet Analysis-Support Vector Machine theory. Transp. Res. Part C Emerg. Technol. 2013, 27, 219–232. [Google Scholar] [CrossRef]
- Fusco, G.; Colombaroni, C.; Isaenko, N. Short-term speed predictions exploiting big data on large urban road networks. Transp. Res. Part C Emerg. Technol. 2016, 73, 183–201. [Google Scholar] [CrossRef]
- Fan, Q.; Wang, W.; Hu, X.; Hua, X.; Liu, Z. Space-Time Hybrid Model for Short-Time Travel Speed Prediction. Discret. Dyn. Nat. Soc. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Pozna, C.; Precup, R.-E.; Tar, J.K.; Škrjanc, I.; Preitl, S. New results in modelling derived from Bayesian filtering. Knowl-Based Syst. 2010, 23, 182–194. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An Improved Fuzzy Neural Network for Traffic Speed Prediction Considering Periodic Characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Yu, R.; Li, Y.; Shahabi, C.; Demiryurek, U.; Liu, Y. Deep learning: A generic approach for extreme condition traffic forecasting. In Proceedings of the 17th SIAM International Conference on Data Mining, SDM 2017, Houston, TX, USA, 27–29 April 2017; pp. 777–785. [Google Scholar]
- Wang, J.; Chen, R.; He, Z. Traffic speed prediction for urban transportation network: A path based deep learning approach. Transp. Res. Part C Emerg. Technol. 2019, 100, 372–385. [Google Scholar] [CrossRef]
- Nowaková, J.; Prilepok, M.; Snášel, V. Medical image retrieval using vector quantization and fuzzy S-tree. J. Med. Syst. 2017, 41, 18. [Google Scholar] [CrossRef] [Green Version]
- Sarma, K.K. Neural network based feature extraction for assamese character and numeral recognition. Int. J. Artif. Intell. 2009, 2, 37–56. [Google Scholar]
- Gil, R.P.A.; Johanyák, Z.C.; Kovács, T. Surrogate model based optimization of traffic lights cycles and green period ratios using microscopic simulation and fuzzy rule interpolation. Int. J. Artif. Intell. 2018, 16, 20–40. [Google Scholar]
- Al-Ahmadi, H.M.; Jamal, A.; Reza, I.; Assi, K.J.; Ahmed, S.A. Using Microscopic Simulation-Based Analysis to Model Driving Behavior: A Case Study of Khobar-Dammam in Saudi Arabia. Sustainability 2019, 11, 3018. [Google Scholar] [CrossRef] [Green Version]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference and Prediction; Springer Series and Statistics; Springer: Stanford, CA, USA, 2008. [Google Scholar]
- Booker, D.J.; Whitehead, A.L. Inside or outside: Quantifying extrapolation across river networks. Water Resour. Res. 2018, 54, 6983–7003. [Google Scholar] [CrossRef]
- Meinshausen, N. Quantile regression forests. J. Mach. Learn. Res. 2006, 7, 983–999. [Google Scholar]
- Guo, J.; Williams, B.M.; Smith, B.L. Data collection time intervals for stochastic short-term traffic flow forecasting. Transp. Res. Rec. 2007, 2024, 18–26. [Google Scholar] [CrossRef]
- Smith, B.L.; Ulmer, J.M. Freeway traffic flow rate measurement: Investigation into impact of measurement time interval. J. Transp. Eng. 2003, 129, 223–229. [Google Scholar] [CrossRef]
- Polson, N.G.; Sokolov, V.O. Deep learning for short-term traffic flow prediction. Transp. Res. Part C Emerg. Technol. 2017, 79, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Qiu, C.; Wang, C.; Zuo, X.; Fang, B. A bayesian regularized neural network approach to short-term traffic speed prediction. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 2215–2220. [Google Scholar]
- Gülaçar, H.; Yaslan, Y.; Oktuğ, S.F. Short term traffic speed prediction using different feature sets and sensor clusters. In Proceedings of the NOMS 2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016; pp. 1265–1268. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Value/Range |
|---|---|
| maximum leaves per tree, l | {16–128} |
| number of trees constructed, | {40–256} |
| Minimum samples per leaf node | {1–9} |
| begging fraction | {0.25–1} |
| feature fraction | {0.25–1} |
| split fraction, s | {0.25–1} |
| samples count for quantiles estimation | {100} |
| required quantile values, | {0.07, 0.51, 0.95} |
| Quantile Loss | Prediction Horizons | ||
|---|---|---|---|
| 5 min | 10 min | 15 min | |
| Detector 1 | 0.58 | 0.99 | 1.08 |
| Detector 2 | 0.71 | 0.93 | 1.17 |
| Detector 3 | 0.655 | 0.788 | 0.70 |
| Detector 4 | 1.083 | 1.010 | 0.80 |
| RMSE | Prediction Horizons | ||
|---|---|---|---|
| 5 min | 10 min | 15 min | |
| Detector 1 | 14.95 | 17.33 | 20.26 |
| Detector 2 | 2.29 | 12.30 | 16.12 |
| Detector 3 | 6.03 | 6.68 | 5.74 |
| Detector 4 | 9.99 | 8.71 | 1.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zahid, M.; Chen, Y.; Jamal, A.; Mamadou, C.Z. Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability 2020, 12, 646. https://doi.org/10.3390/su12020646
Zahid M, Chen Y, Jamal A, Mamadou CZ. Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability. 2020; 12(2):646. https://doi.org/10.3390/su12020646
Chicago/Turabian StyleZahid, Muhammad, Yangzhou Chen, Arshad Jamal, and Coulibaly Zie Mamadou. 2020. "Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach" Sustainability 12, no. 2: 646. https://doi.org/10.3390/su12020646
APA StyleZahid, M., Chen, Y., Jamal, A., & Mamadou, C. Z. (2020). Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability, 12(2), 646. https://doi.org/10.3390/su12020646