Developing UAV-Based Forest Spatial Information and Evaluation Technology for Efficient Forest Management

 ,
,  , , , ,
, , , , 
Abstract
:1. Introduction
2. Study Area and Materials
2.1. Study Areas
2.2. UAV Data Collection
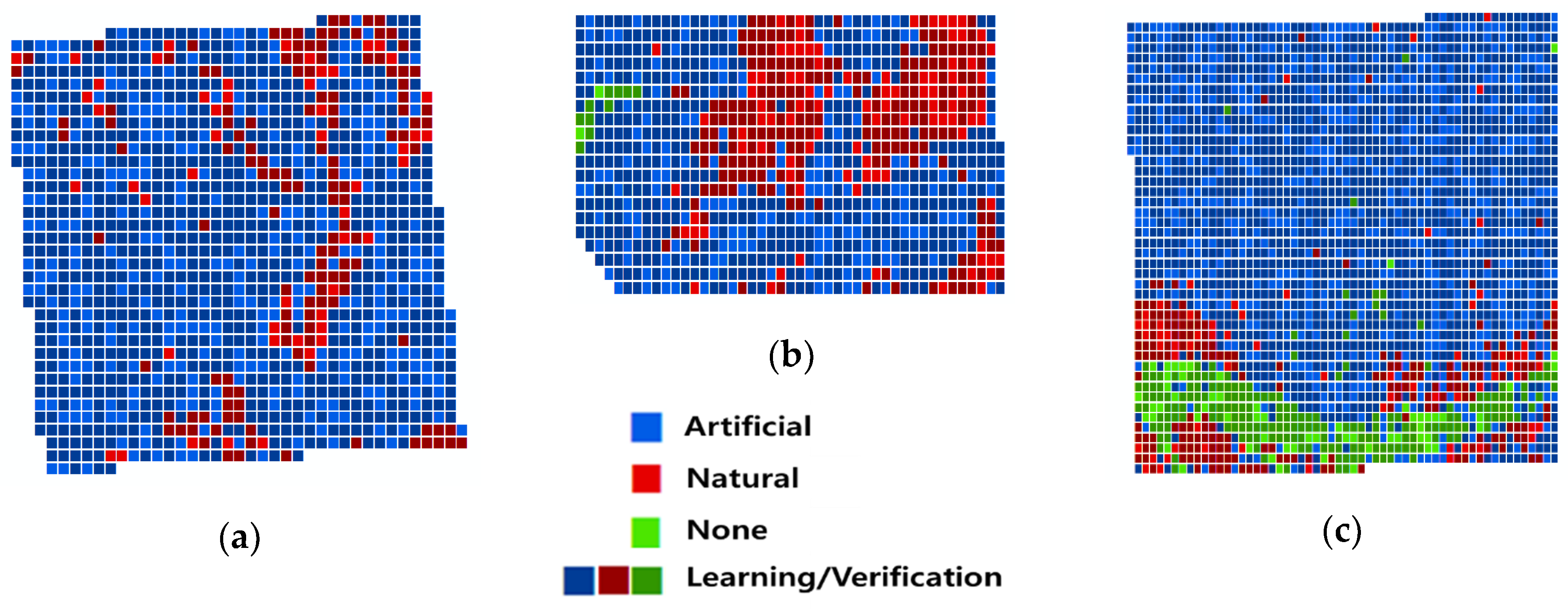
2.3. Field Survey Data for Learning and Verification
3. Methods
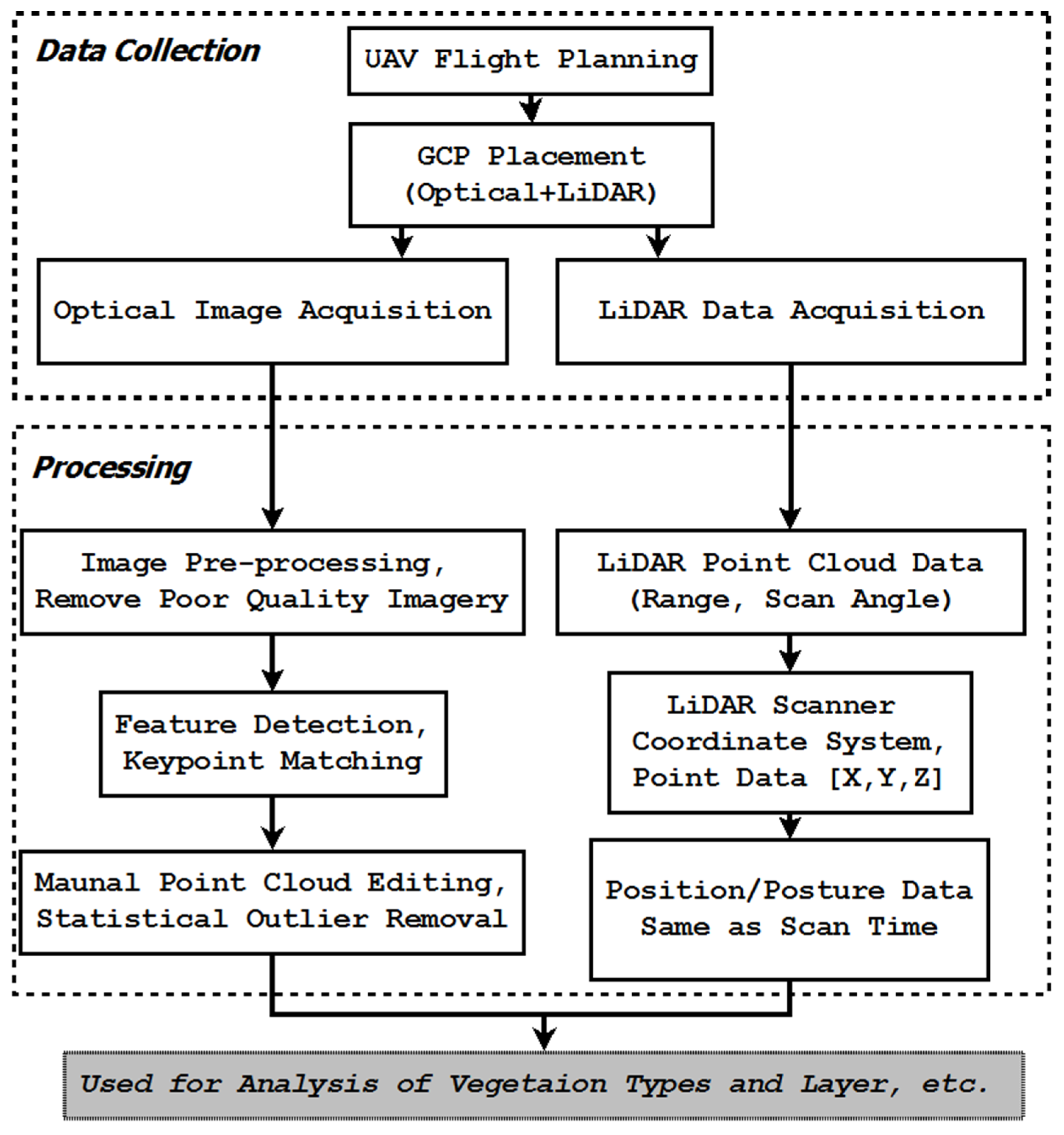
3.1. Construction of the UAV-Optical Image and UAV-LiDAR Data
3.1.1. Construction of the UAV-Optical Image Data
3.1.2. Construction of the UAV-LiDAR Data
3.2. Usage and Analysis of UAVs in Determining Grades for the Vegetation Conservation Classification
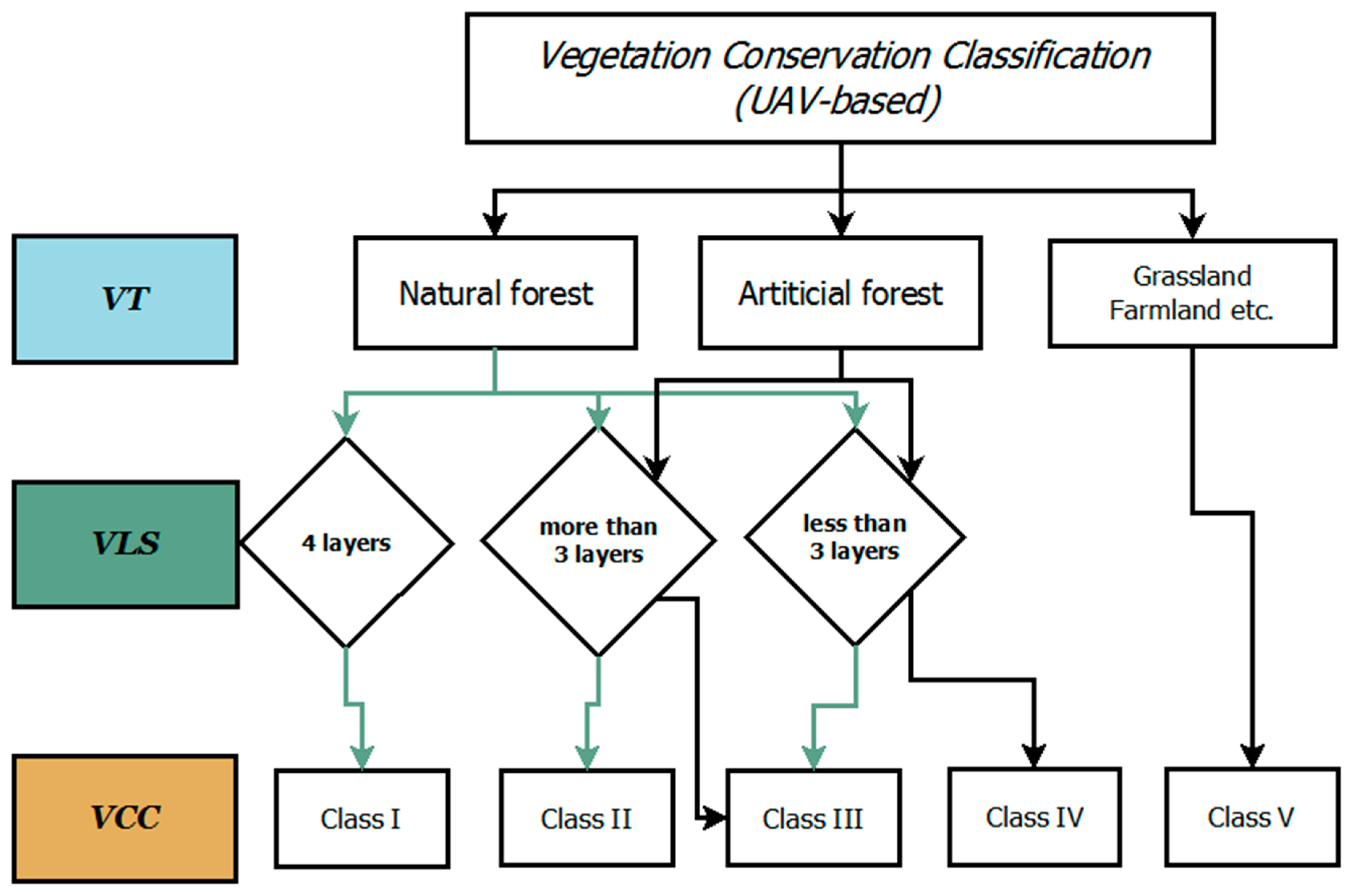
3.2.1. Usage in Determining Grades for the Vegetation Conservation Classification
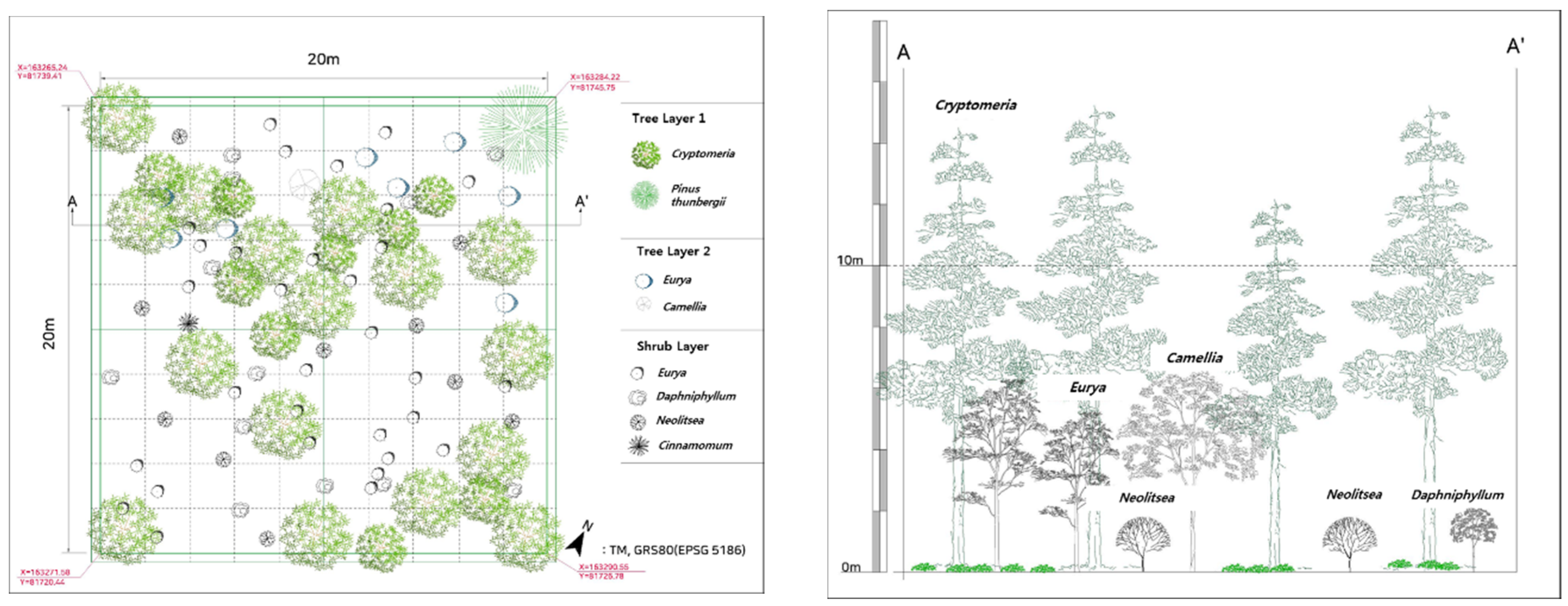
3.2.2. Analysis of the Vegetation Types and Stratification in the Study Areas
3.3. Development of the UAV Data-Based Evaluation Technique for the Vegetation Conservation Classification
4. Results and Discussion
4.1. Position Accuracy Verification between UAV-Optics and UAV-LiDAR
4.2. Results for the Analysis of the Vegetation Types and Stratification in the Study Areas
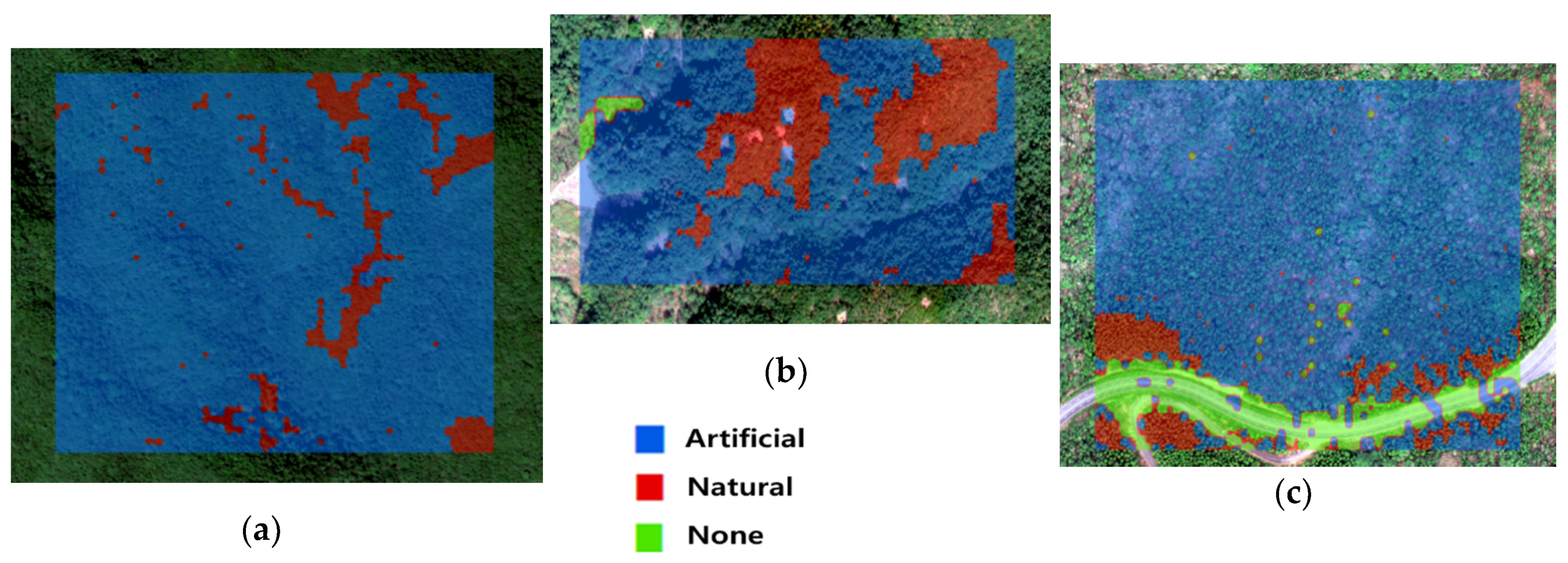
4.2.1. Results for the Analysis of the Vegetation Types (Natural/Artificial Forest)
4.2.2. Results for the Analysis of the Vegetation Stratification
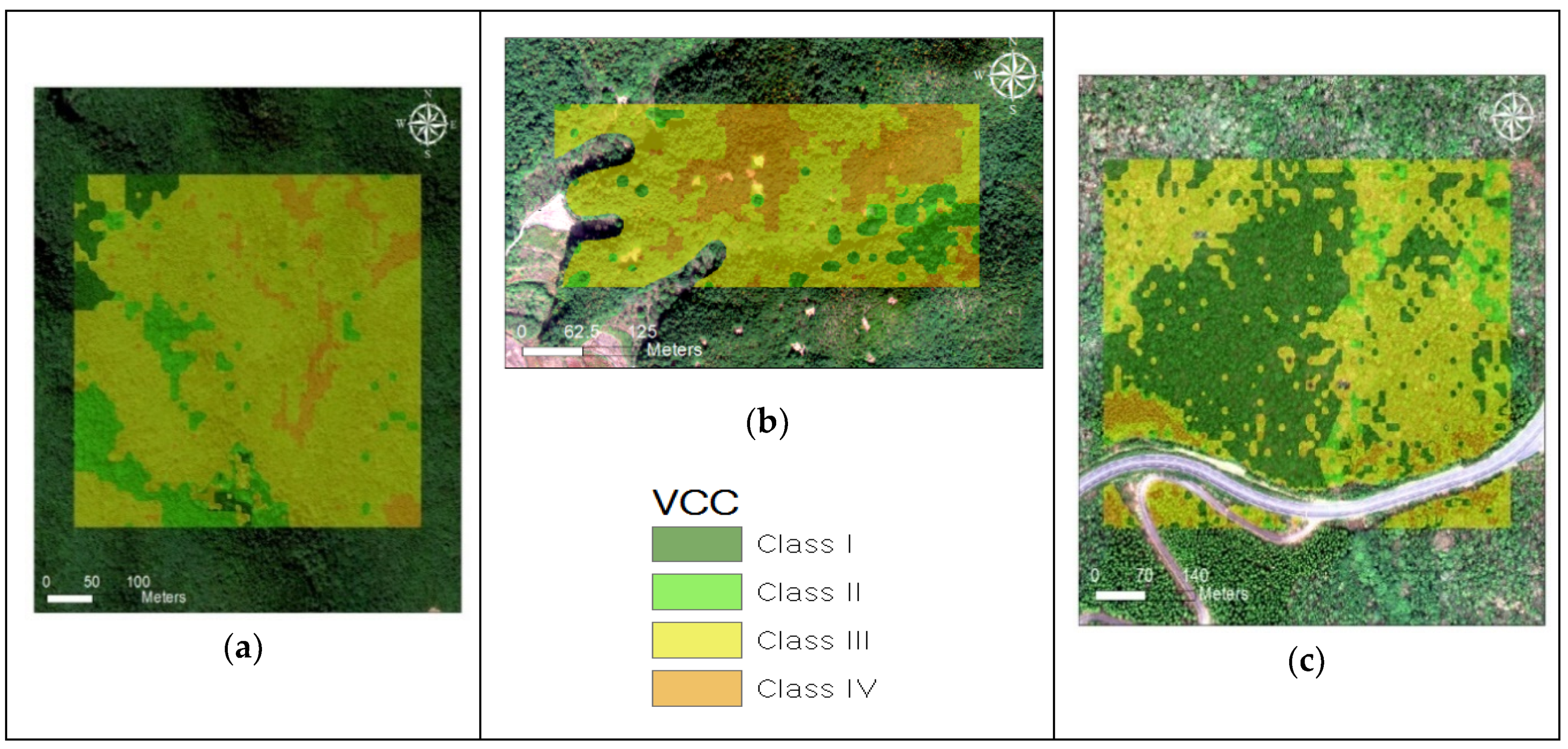
4.3. Results for the Analysis of the UAV-Based Vegetation Conservation Classification Evaluation Technique
4.4. Comparison with the Ecological Zoning Map Grades
5. Conclusions and Implications
Author Contributions
Funding
Conflicts of Interest
References
- Gang, J.E. Urban Renewal Strategy for Adapting to Climate Change: Use of Green Infrastructure on Flood Mitigation; Report of Korean Environment Institute; Korean Environment Institute: Sejong, Korea, 2011; pp. 7–85. [Google Scholar]
- Mell, I.; Allin, S.; Reimer, M.; Wilker, J. Strategic green infrastructure planning in Germany and the UK: A transnational evaluation of the evolution of urban greening policy and practice. Int. Plan. Stud. 2017, 22, 333–349. [Google Scholar] [CrossRef] [Green Version]
- Lafortezza, R.; Davies, C.; Sanesi, G.; Konijnendijk, C. Green Infrastructure as a tool to support spatial planning in European urban regions. iforest Biogeosci. For. 2013, 6, 102–108. [Google Scholar] [CrossRef] [Green Version]
- Schiappacasse, P.; Müller, B. Planning Green Infrastructure as a Source of Urban and Regional Resilience—Towards Institutional Challenges. Urbani Izziv 2015, 26, S13–S24. [Google Scholar] [CrossRef]
- Mell, I.C. Green infrastructure: Reflections on past, present and future praxis. Landsc. Res. 2017, 42, 135–145. [Google Scholar] [CrossRef] [Green Version]
- Seiwert, A.; Rößler, S. Understanding the term green infrastructure: Origins, rationales, semantic content and purposes as well as its relevance for application in spatial planning. Land Use Policy 2020, 97, 104785. [Google Scholar] [CrossRef]
- Lee, D.G.; Kim, H.G. Addressing Climate Change Problems with Green Infrastructure. J. Korea Environ. Stud. 2014, 53, 10. [Google Scholar]
- Lee, W.K.; Kim, M.I.; Song, C.H.; Lee, S.G.; Cha, S.E.; Kim, G.S. Application of Remote Sensing and Geographic Information System in Forest Sector. J. Cadastre Land Inf. 2016, 46, 27–42. [Google Scholar]
- Government Complex-sejong. Criteria for Evaluation and Classification of Vegetation Conservation; Related to Article 13; National Law Information Center of Korea, Government Complex-Sejong: Sejong, Korea, 2015.
- Korea Ministry of Environment. Regulations on Methods of Survey of Natural Environment and Criteria for Classification of Grades, etc.; Korea Ministry of Environment: Sejong, Korea, 2015.
- Cha, S.E.; Jo, H.W.; Lim, C.H.; Song, C.H.; Lee, S.G.; Kim, J.W.; Park, C.Y.; Jeon, S.W.; Lee, W.K. Estimating the Stand Level Vegetation Structure Map Using Drone Optical Imageries and LiDAR Data based on an Artificial Neural Networks (ANNs). Korean J. Remote Sens. 2020, 36, 653–666. [Google Scholar]
- Longo, M.; Keller, M.; dos-Santos, M.N.; Leitold, V.; Pinagé, E.R.; Baccini, A.; Saatchi, S.; Nogueira, E.M.; Batistella, M.; Morton, D.C. Aboveground biomass variability across intact and degraded forests in the Brazilian Amazon. Glob. Biogeochem. Cycles 2016, 30, 1639–1660. [Google Scholar] [CrossRef] [Green Version]
- Leitold, V.; Morton, D.C.; Longo, M.; Dos-Santos, M.N.; Keller, M.; Scaranello, M. El Nino drought increased canopy turnover in Amazon forests. N. Phytol. 2018, 219, 959–971. [Google Scholar] [CrossRef] [Green Version]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Webster, C.; Westoby, M.; Rutter, N.; Jonas, T. Three-dimensional thermal characterization of forest canopies using UAV photogrammetry. Remote Sens. Environ. 2018, 209, 835–847. [Google Scholar] [CrossRef] [Green Version]
- Lucas, R.M.; Lee, A.C.; Bunting, P.J. Retrieving forest biomass through integration of CASI and LiDAR data. Int. J. Remote Sens. 2008, 29, 1553–1577. [Google Scholar] [CrossRef]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.-W. Multi-temporal terrestrial laser scanning for modeling tree biomass change. For. Ecol. Manag. 2014, 318, 304–317. [Google Scholar] [CrossRef]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens. 2008, 29, 1433–1452. [Google Scholar] [CrossRef] [Green Version]
- van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Sung, H.C.; Zhu, Y.Y.; Jeon, S.W. Study on Application Plan of Forest Spatial Informaion Based on Unmanned Aerial Vehicle to Improve Environmental Impact Assessment. J. Korean Environ. Res. Technol. 2019, 22, 14. [Google Scholar]
- Dandois, J.; Olano, M.; Ellis, E. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Moon, H.-S.; Lee, W.-S. Development and Verification of a Module for Positioning Buried Persons in Collapsed Area. J. Korea Acad. Ind. Coop. Soc. 2016, 17, 427–436. [Google Scholar]
- Lee, Y.S.; Lee, D.G.; Yu, Y.G.; Lee, H.J. Application of Drone Photogrammetry for Current State Analysis of Damage in Forest Damage Areas. J. Korean Soc. Geospat. Inf. Syst. 2016, 24, 49–58. [Google Scholar]
- Park, Y.J.; Jung, K.Y. Availability Evaluation for Generation of Geospatial Information using Fixed Wing UAV. J. Korean Soc. Geospat. Inf. Syst. 2014, 22, 159–164. [Google Scholar]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. Gisci. Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Park, K.J.; Jung, K.Y. Investigation and Analysis of Forest Geospatial Information Using Drone. J. Korea Acad. Ind. Coop. Soc. 2018, 19, 6. [Google Scholar]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (UAV) for assessment of qualitative classification of Norway spruce in temperate forest stands. Geo Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Müllerová, J.; Brůna, J.; Bartaloš, T.; Dvořák, P.; Vítková, M.; Pyšek, P. Timing Is Important: Unmanned Aircraft vs. Satellite Imagery in Plant Invasion Monitoring. Front. Plant Sci. 2017, 8, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Komárek, J.; Klouček, T.; Prošek, J. The potential of Unmanned Aerial Systems: A tool towards precision classification of hard-to-distinguish vegetation types? Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 9–19. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P. Determining tree height and crown diameter from high-resolution UAV Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 1–19. [Google Scholar] [CrossRef]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Oh, S.J. Database Design for Management of Forest Resources using a Drone. J. Converg. Cult. Technol. 2019, 5, 251–256. [Google Scholar]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef] [Green Version]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Ørka, H.; Gobakken, T.; Næsset, E. Inventory of Small Forest Areas Using an Unmanned Aerial System. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Dash, J.; Pearse, G.; Watt, M.; Paul, T. Combining Airborne Laser Scanning and Aerial Imagery Enhances Echo Classification for Invasive Conifer Detection. Remote Sens. 2017, 9, 156. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.J.; Bang, H.-S.; Lee, J.-W. Use of Unmanned Aerial Vehicle for Forecasting Pine Wood Nematode in Boundary Area: A Case Study of Sejong Metropolitan Autonomous City. J. Korean For. Soc. 2017, 106, 100–109. [Google Scholar]
- Lee, S.; Park, S.J.; Baek, G.; Kim, H.; Lee, C.W. Detection of Damaged Pine Tree by the Pine Wilt Disease Using UAV Image. Korean J. Remote Sens. 2019, 35, 359–373. [Google Scholar]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of fir trees (Abies sibirica) damaged by the bark beetle in unmanned aerial vehicle images with deep learning. Remote Sens. 2019, 11, 643. [Google Scholar] [CrossRef] [Green Version]
- Merino, L.; Caballero, F.; Martínez-De-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Yuan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. For. Res. 2015, 45, 783–792. [Google Scholar] [CrossRef]
- Government Complex-sejong. Guidelines for Working on Public Surveys Using Unmanned Aerial Vehicles; Related to Article 10; National Law Information Center of Korea, Government Complex-Sejong: Sejong, Korea, 2018.
- He, F.; Zhou, T.; Xiong, W.; Hasheminnasab, S.M.; Habib, A. Automated Aerial Triangulation for UAV-Based Mapping. Remote Sens. 2018, 10, 1952. [Google Scholar] [CrossRef] [Green Version]
- Government Complex-sejong. Guidelines for Preparing Ecological Zoning Map; Related to Article 12–15; National Law Information Center of Korea, Government Complex-Sejong: Sejong, Korea, 2018. [Google Scholar]
- Wieser, M.; Mandlburger, G.; Hollaus, M.; Otepka, J.; Glira, P.; Pfeifer, N. A case study of UAS borne laser scanning for measurement of tree stem diameter. Remote Sens. 2017, 9, 1154. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Optical Image | Lidar Data | |
|---|---|---|---|
| Drones | Types |  <FiteFLY6 Pro> |  <XW-1400vzx> |
| Filming speed | Less than 1 capture per second | Approximately 300,000 points per second | |
| Size | 1.5 m × 0.95 m | 1.4 m × 1.4 m | |
| Spectral band | Red, green, blue, red edge, NIR 1 | - | |
| Spatial resolution | Resolution of approximately 8 cm per pixel for an altitude of 120 m | - | |
| Horizontal accuracy | 1~2 GSD | 1~2 GSD | |
| Vertical accuracy | 1~3 GSD | 2~3 GSD | |
| Sensors | Types | MicaSense RedEdge | Velodyne Puck VLP-16 |
| Flight time | 30–45 min | 35–40 min | |
| Point Density (50 m) | About 100–200 lidar point/m2 | ||
| Maximum flight altitude | 1 km | - | |
| Payload | 1 kg | 6 kg | |
| Class | Classification Standard |
|---|---|
| Class I | A polar forest or similar natural forest that has reached the final stage of vegetation. |
| Class II | Forest vegetation nearly recovered to the point of being close to natural again after a disturbance of the natural vegetation. |
| Class III |
|
| Class IV | Artificial afforestation |
| Class V | Secondary formed grassland vegetation, orchards, paddies, fields, etc. |
 |  | Gongju | 0.05 m 0.36 m |
| Samcheok | 0.07 m 0.19 m | ||
| Segwipo | 0.06 m 0.32 m | ||
 | |||
| Division | Class I | Class II | Class III | Class IV | Class V | Sum | |
|---|---|---|---|---|---|---|---|
| Gongju | Area (m2) | 5446 | 16,187 | 101,798 | 10,300 | - | 133,731 |
| Ratio (%) | 4.08 | 12.10 | 76.12 | 7.70 | - | 100.00 | |
| Samcheok | Area (m2) | 6500 | 1784 | 47,233 | 21,309 | - | 76,826 |
| Ratio (%) | 8.46 | 2.32 | 61.48 | 27.74 | - | 100.00 | |
| Seogwipo | Area (m2) | 91,591 | 10,170 | 108,867 | 11,307 | - | 221,935 |
| Ratio (%) | 41.27 | 4.58 | 49.05 | 5.09 | - | 100.00 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Jeon, S.; Sung, H.; Kim, Y.; Park, C.; Cha, S.; Jo, H.-w.; Lee, W.-k. Developing UAV-Based Forest Spatial Information and Evaluation Technology for Efficient Forest Management. Sustainability 2020, 12, 10150. https://doi.org/10.3390/su122310150
Zhu Y, Jeon S, Sung H, Kim Y, Park C, Cha S, Jo H-w, Lee W-k. Developing UAV-Based Forest Spatial Information and Evaluation Technology for Efficient Forest Management. Sustainability. 2020; 12(23):10150. https://doi.org/10.3390/su122310150
Chicago/Turabian StyleZhu, Yongyan, Seongwoo Jeon, Hyunchan Sung, Yoonji Kim, Chiyoung Park, Sungeun Cha, Hyun-woo Jo, and Woo-kyun Lee. 2020. "Developing UAV-Based Forest Spatial Information and Evaluation Technology for Efficient Forest Management" Sustainability 12, no. 23: 10150. https://doi.org/10.3390/su122310150
APA StyleZhu, Y., Jeon, S., Sung, H., Kim, Y., Park, C., Cha, S., Jo, H. -w., & Lee, W. -k. (2020). Developing UAV-Based Forest Spatial Information and Evaluation Technology for Efficient Forest Management. Sustainability, 12(23), 10150. https://doi.org/10.3390/su122310150