1. Introduction
In China and many other developing countries, it has been a common phenomenon that passenger car (PC) driving is mixed with heavy vehicles (HVs), i.e., trucks and buses, on both freeways and arterials [
1,
2,
3], which is defined as heterogeneous traffic flow. This is mainly because public transport, such as inner-city buses and intercity coaches, can carry more passengers in comparison with PCs and thus has the potential to relieve traffic congestion problems [
4,
5,
6]. Moreover, trucks are the primary land freight transport mode in the logistic chain and transfer freight to and from seaports, airfields, rail terminals, etc. [
7,
8]. This kind of heterogeneous traffic flow characteristic, however, has been regarded as one of the primary reasons for traffic collision [
9,
10,
11,
12,
13,
14]. When traffic volume is low, PC drivers usually drive at a relatively higher speed than HV drivers and tend to overtake a leading HV. In comparison, under high traffic volume conditions, because there are no sufficient overtaking opportunities, under the majority of situations a driver has to follow the leading vehicle [
15,
16]. Nevertheless, in reality, it was found that the variety in vehicle-following patterns (i.e., a PC following another passenger vehicle, PC-PC; a PC following a HV, PC-HV; a HV following a PC, HV-PC; and a HV following another HV, HV-HV) resulted in potential variations in speed and headway in traffic flow [
17,
18,
19,
20,
21]. In addition, during the vehicle-following process, the following vehicle driver has to adjust his or her driving behavior, such as following headways, acceleration and deceleration maneuvers, and lane-changing decisions based on the status of the leading vehicle [
22,
23,
24,
25]. Considering the aggressive driving behaviors in China, such as the short vehicle-following headway and the frequent acceleration and deceleration maneuvers, the turbulences in traffic flow could be further deteriorated [
14,
26].
Due to the heterogeneities in both vehicle dynamics and drivers’ driving experience and behavior, the various vehicle-following patterns tend to result in variations in speed and/or time headway, which increase the potential of rear-end collisions [
27]. In a real-world setting, the sightline of PC drivers is relatively low (approximately 1.1 m above the road surface) and typically parallel to the road. In comparison, the sightline of HV drivers is significantly higher than PC drivers (approximately 2.5 m above the road surface) and, usually, HV drivers tend to look down at the road due to the relative high sightline [
28,
29]. The difference in driving postures would affect the view of drivers and their estimations of the space headway to the leading vehicle. Generally speaking, HV drivers tend to overestimate space headways, which increases the risk of rear-end collisions [
30].
With this concern, it is necessary to take into account the impacts of vehicle characteristics and driving behavior on traffic operations when assessing the risk of crashes on freeways. In this regard, this research aims to investigate the risks of rear-end crashes for different vehicle-following patterns based on microscopic real-world traffic flow data; accordingly, it could provide recommendations to drivers regarding the potential crash risk and minimum safe vehicle-following headways, so that they can timely adjust their driving behavior to reduce the possibility of being involved in a rear-end crash. The remainder of this paper is organized as follows:
Section 2 presents a review of the start-of-the-art regarding crash risk assessment.
Section 3 describes the acquisition and reduction of vehicle-type-specific traffic flow data.
Section 4 details the methodologies employed for assessing the crash risk under different vehicle-following patterns.
Section 5 documents the minimum safe vehicle-following distances for each vehicle-following pattern. Finally, the conclusions of this study and discussions on future research requirements are summarized in
Section 6.
2. Literature Review
To date, there have been a number of studies that employed real-world traffic flow data for crash risk assessment. Oh et al. [
31] identified rear-end collision risks based on traffic flow data collected by inductive loop detectors. Traffic performance data of individual vehicles were extracted from loop detectors, which were employed to identify collision potentials. Similarly, Abdel-Aty et al. [
32] identified crash-prone conditions on freeways using loop detector data. Logistic regression models were developed for assessing the risk of crashes under two different speed conditions. It was concluded that the crashes that occur under moderate- to high-speed condition differ distinctly from low-speed condition in both severity and traffic flow conditions. Shew et al. [
33] also employed loop detector data to estimate real-time crash risks on freeways. The classification tree and neural network-based crash risk assessment models were developed, and they are expected to provide local authorities with a reasonable estimate of crash risk. Yu and Abdel-Aty [
34] utilized the support vector machine (SVM) model to evaluate real-time crash risk. Results indicated that SVM models have great application potential in real-time crash risk evaluation because they require a smaller sample size than the traditional logistic regression models to generate a comparable result. Lao et al. [
35] developed a generalized nonlinear model (GNM) for estimating highway rear-end crash risk. Rear-end accident data collected from 10 highway routes in the state of Washington were employed to calibrate the model. Results suggested that truck percentage and grade increased crash risks initially but decreased the risks after reaching certain thresholds. Kwak and Kho [
36] developed real-time crash risk prediction models for different expressway segment types (mainline and ramp) and traffic flow states (uncongested and congested). Modeling results showed that both roadway type and traffic flow characteristics influenced the predicted crash risks. Yu et al. [
37] developed disaggregate crash risk analysis models with loop detector traffic data and historical crash data to reveal the mechanisms of crashes. Through a Bayesian semi-parametric model, it was found that crashes occurring during weekday peak hours were impacted by upstream traffic; variations of volume and the speed drops would increase crash occurrence likelihood. Mullakkal-Babu et al. [
38] presented a qualitative and quantitative comparison of five safety indicators (i.e., inverse time to collision, post-encroachment time, potential indicator of collision with urgent deceleration, warning index, and safety field force) to evaluate their usefulness in quantifying crash risks. Results indicated that all five safety indicators were capable of delineating risk continuously in a one-dimensional interaction such as car-following. Xu et al. [
1] investigated the impacts of traffic flow conditions on the casualty of different collision types based on high-resolution traffic data. Based on logistic regression modeling, it was found that, for sideswipe crashes, the crash risk was influenced by the speed difference between adjacent lanes, volume on the right lane, and standard deviation of volume on inner lanes. For rear-end crashes, the congested traffic conditions at the diverge area, and a large difference in speed on the right lane between the upstream and downstream stations in adverse weather, contributed to crash casualty.
For heterogeneous traffic flow conditions, several studies have been conducted to investigate the heterogeneity in vehicle-following behavior, as well as its impact on crash risk. Ossen and Hoogendoorn [
19] identified the different vehicle-following behaviors of passenger vehicle and truck drivers. Results suggested that the desired headways of passenger car drivers were lower when following a truck than when following a passenger car. In comparison, truck drivers adopted a more conservative vehicle-following behavior than passenger vehicle drivers did, and their speed variations were lower than those of passenger vehicle drivers. Ye and Zhang [
29] investigated four vehicle type-specific time headways based on different combinations of leading vehicles and following vehicles at different traffic flow levels. Statistical results revealed that, under all traffic flow conditions, the truck-truck headway was the largest and the car-car headway was the smallest. The truck-car headway was larger than the car-truck headway, which is mainly because truck drivers are usually sitting higher than car drivers, which enables them to look beyond the car they are following, and thus keep a smaller separation. Furthermore, it was found that traffic flow level affected vehicle type-specific headway characteristics. Weng et al. [
20] evaluated rear-end crash risk in work zones for four different vehicle-following patterns. Results show that the car-truck following pattern had the largest rear-end crash risk, followed by truck-truck, truck-car, and car-car patterns. Recently, Hyun et al. [
39] employed the headways obtained from inductive loop detectors to investigate the impacts of trucks on crash risk. A Gaussian Mixture (GM) model was developed to identify trucks and analyze the interactions between trucks and non-trucks. Modeling results revealed that interactions between the leading and following vehicles were significantly associated with crash risk; rear-end crashes were more likely to occur when a truck was following a non-truck. Therefore, traditional safety measures that estimate the average traffic condition such as total volume or average headway of the traffic stream might not exactly capture the actual crash risk. Zhao and Lee [
40] analyzed the rear-end collision risk of cars and heavy vehicles on freeways using crash potential index (CPI) as the surrogate measure of safety (SMoS). It was found that rear-end collision risk was lower for heavy vehicles than for cars in the crash case due to their shorter reaction time and lower speed when space headway was shorter. With this consideration, the authors emphasized the importance of reflecting the differences in driver behavior and vehicle performance characteristics between cars and heavy vehicles when estimating crash risk. Dimitriou et al. [
21] investigated car-following characteristics and vehicle-by-vehicle interactions to assess rear-end crash potential on urban roads. The stopping distance between two consecutive vehicles was employed as a SMoS. It was found that speeds were lower and headways were higher when trucks lead; moreover, rear-end crash potential was presented when traffic flow and speed standard deviation was higher. Similarly, Choudhary et al. [
41] explored the relationships of speed variations between different vehicle types with crashes through a Multivariate Poisson lognormal regression model. Modeling results revealed that crash rates increased with the raise of speed variations, especially at higher traffic volumes. In addition, modeling results suggested that specific combinations of traffic characteristics increase the likelihood of crashes. Mahmud et al. [
3] investigated the factors affecting crash frequency on a two-lane two-way highway in a heterogeneous traffic environment using micro-level traffic flow data; accordingly, he identified the safety risk locations of a particular road section. It was concluded that speeding was the primary influential factor in crashes. Zhang et al. [
2] pointed out that a driver’s car-following behavior depends on perceived risk levels, acceleration and deceleration habits, and driver reaction characteristics. Based on this, the authors investigated the impact of heterogeneity of driving behavior on rear-end crash risk through simulation experiments. Simulation results implied that driving behavior characteristics and the proportion of different driving styles (i.e., stable and unstable driving styles) were the most critical factors that affect shock waves in traffic flow, and subsequently rear-end crash risk. When stable and unstable driving styles coexist, their proportions had important influences on rear-end crash risk.
In summary, previous research generally revealed that driving behavior heterogeneity has a considerable impact on rear-end crash risk. Therefore, exploring the effect of each vehicle-following behavior on rear-end crash probability could improve our understanding of crash risk and would support the development of more efficient safety countermeasures to minimize rear-end crash risks.
5. Safe Vehicle-Following Headways
In reality, the majority of rear-end collisions are attributed to insufficient vehicle-following distance [
21,
48,
49]. Because the braking capability of the two vehicle categories varies, the minimum safe vehicle-following distances for different vehicle-following patterns vary. With this concern, this section aims at determining the minimum safe vehicle-following distances for various vehicle-following patterns based on a micro-level analysis of vehicle braking process.
When a leading vehicle driver slams the brakes on, the minimum safe distance (
) for the following vehicle to avoid a rear-end collision is mainly determined by the difference of braking distances of the leading vehicle (
) and the following vehicle (
), and the safe stopping distance (
) between the two vehicles, as depicted in Equation (10).
where:
refers to the braking distance (m) of the following vehicle starting from the braking process;
refers to the braking distance (m) of the leading vehicle starting from the braking process;
refers to the safe distance (m) between the leading vehicle and the following vehicle.
Generally speaking, a driver’s braking process consists of four steps: (1) driver perception and reaction step, (2) vehicle brake response step, (3) driver braking step, and (4) deceleration step. For the following vehicle, the braking process consists of all these four steps; the time required for performing the four steps are denoted as
,
,
, and
, respectively. During the driver perception and reaction and the vehicle brake response steps, the speed of the following vehicle is assumed to remain a constant speed that equals its vehicle-following speed (
); accordingly, the distances traveled during these two steps are
and
, as depicted in Equations (11) and (12), respectively.
During the driver braking step, the deceleration rate of the following vehicle increases from zero to the vehicle’s maximum deceleration (
). To simplify the modeling, this paper assumes that the vehicle deceleration rate increases linearly with time; then, distance traveled during this step (
) could be described by Equation (13). During the deceleration step, the speed of the following vehicle decreases to zero; distance traveled during this step (
) is estimated by Equation (14). An illustration of the braking process and distance traveled during each step is presented in
Figure 6.
For each vehicle-following pair, driver perception and reaction time and vehicle brake response time will not be taken into account for the leading vehicle. Prior to the braking process, the travel speed of the leading vehicle is denoted as
. Similarly, during the driver braking step, the deceleration rate of the leading vehicle increases from zero to the maximum vehicle deceleration capability (
). Distance traveled during this step (
) is described by Equation (15). During the deceleration step, the speed of the leading vehicle decreases to zero; distance traveled during this step (
) could be estimated by Equation (16).
Substituting Equations (11)–(16) to Equation (10), the minimum safety distance could be estimated as follows:
Because driver braking time (
) is usually a small number (i.e., 0.1 s), the impacts of
and
could be ignored. This paper assumes that
, and
; then, Equation (18) could be simplified as:
Based on the proposed model, minimum safe vehicle-following distance is determined by the following factors: vehicle-following speed (), speed difference (), following vehicle driver’s perception time (), vehicle brake response time (), maximum deceleration rate (), driver braking time (), and safe brake distance (). Specifically, the minimum and maximum vehicle-following speeds were determined as 60 and 120 km/h, which are consistent with the post speed limits of the study site. Based on the descriptive statistics analysis, the absolute speed differences of the collected vehicle-following pairs are within 50 km/h. Because this paper only considers the condition that the following vehicle has a larger speed than the leading vehicle, the speed difference was determined as 0 to 50 km/h. Based on previous research and existing guidelines, the default value for the other parameters are determined as follows: Driver perception and reaction time was determined as 1.6 s, and driver braking time was determined as 0.1 s. Maximum deceleration rates for passenger cars and heavy vehicles were determined as 8.5 and 7.2 m/s2, respectively. Safe braking distances for passenger cars and heavy vehicles were determined as 3 and 5 m, respectively. Brake response times for passenger cars and heavy vehicles were determined as 0.175 and 0.6 s, respectively.
Then, the minimum safety vehicle-following distances (i.e., space headways) under various travel speeds and speed differences for each vehicle-following pattern could be estimated as follows:
Passenger Car—Passenger Car:
Passenger Car—Heavy Vehicle:
Heavy Vehicle—Passenger Car:
Heavy Vehicle—Heavy Vehicle:
Results show that, with the increase of vehicle-following speed and/or speed differences, the minimum safe following distances indicate an increasing trend for all four vehicle-following patterns. Under an identical vehicle-following speed and speed difference, it was found that the PC-HV vehicle-following pattern requires the largest minimum safe space headway, followed by the HV-HV, PC-PC, and HV-PC vehicle-following patterns, respectively. This also suggests that the PC-HV vehicle-following pattern poses the highest crash risk in comparison with other vehicle-following patterns.
6. Concluding Remarks
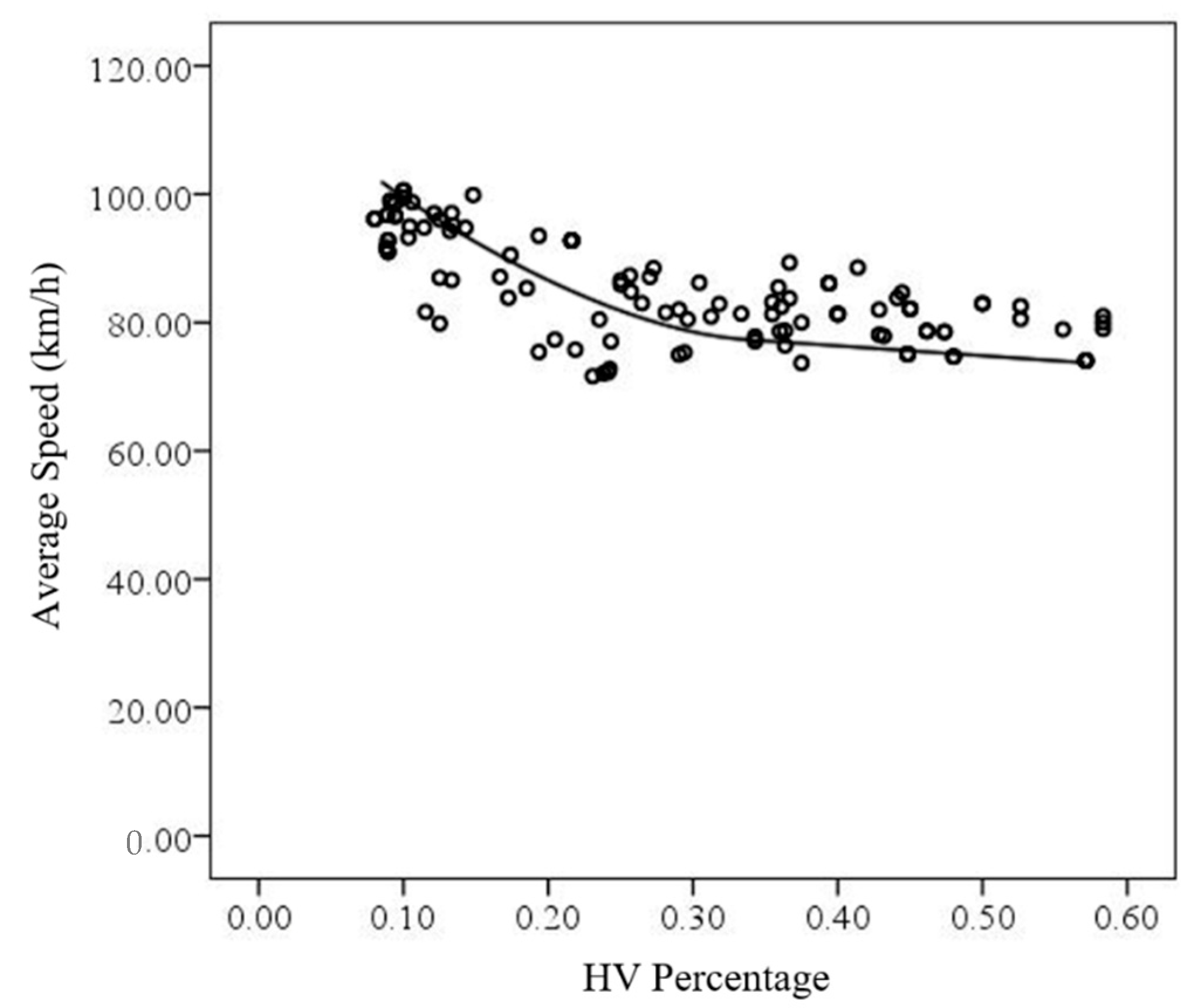
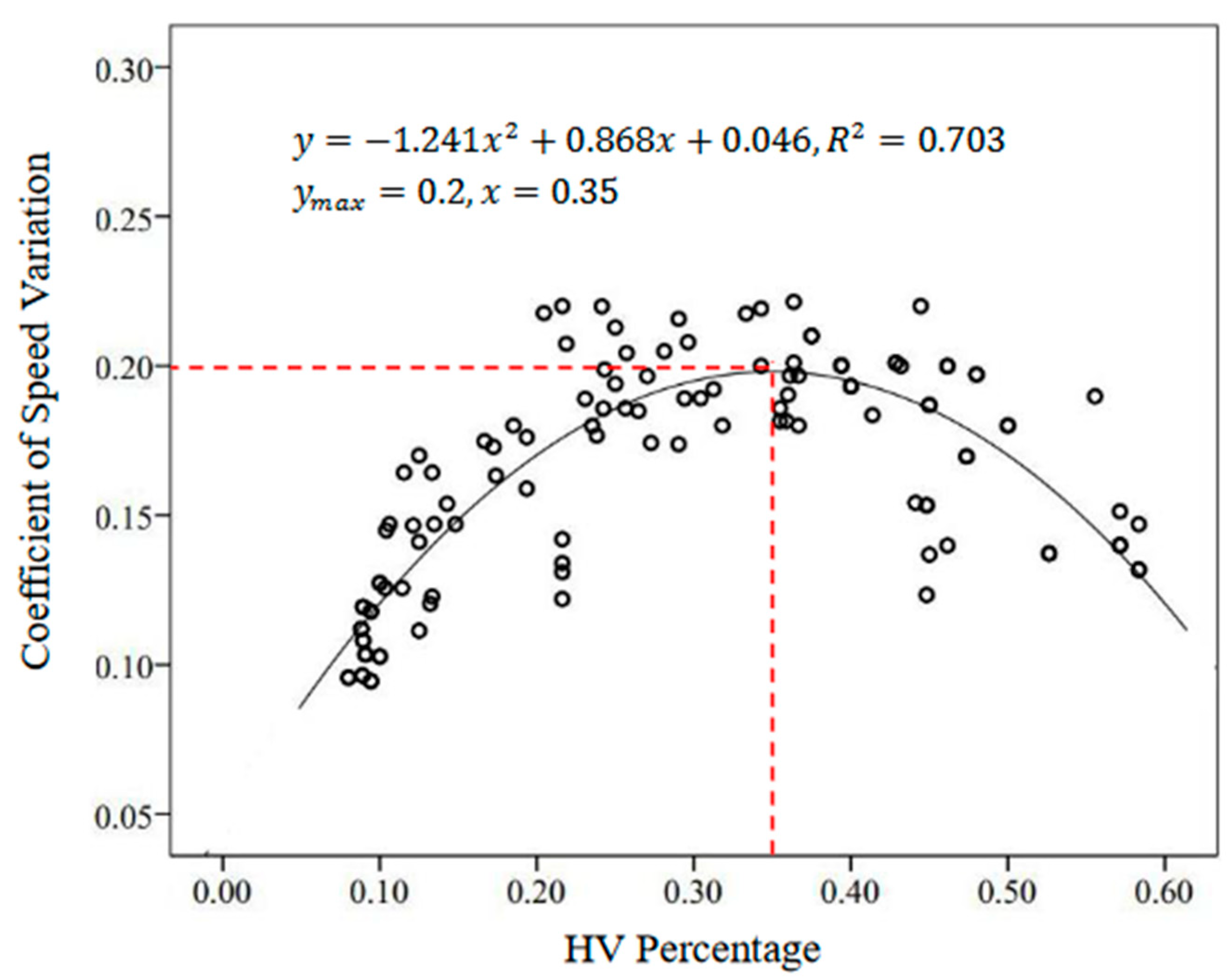
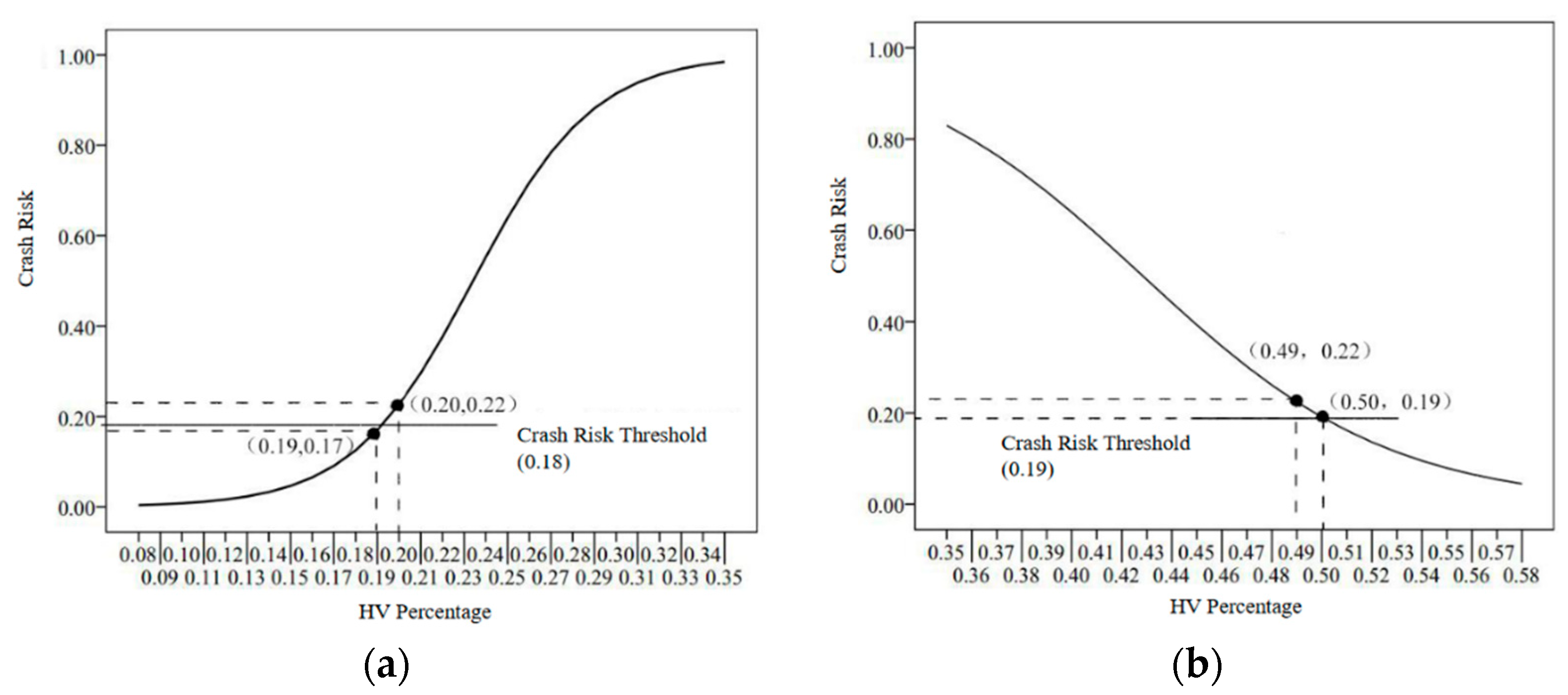
This paper employed a video-based speed data collection approach to investigate the impacts of heavy vehicles on speed variation; ultimately, it assessed the risk of rear-end crashes for different vehicle-following patterns. Field data revealed that average speed displays a decreasing trend with the increase of HV percentage; nevertheless, the variation of speed first increases with HV percentage and reaches the maximum when HV percentage is at around 0.35; then, it shows a decreasing trend with HV percentage. Based on a binary logistic regression modeling of the collected speed data, this paper concluded that a high risk of rear-end collision is expected when HV percentage is between 0.19 and 0.5. In comparison, when HV percentage is either below 0.19 or beyond 0.5, a low risk of rear-end collision is anticipated.
Then, this paper employed TTC and DRAC as surrogate measures of safety to assess the crash risk of four vehicle-following patterns. Results show that the PC-HV vehicle-following pattern has the lowest TTC and the highest DRAC (i.e., the highest risk of rear-end collision), and the HV-PC vehicle-following pattern has the highest TTC and lowest DRAC (i.e., the lowest rear-end collision risk). In addition, based on the analytical modeling of the vehicle braking process, this paper develops models for estimating the minimum safe vehicle-following distances for each vehicle-following pattern under various travel speeds and speed differences. In general, it was concluded that, for a given travel speed and speed difference scenario, HVs require a larger safe following distance than PCs. Specifically, the PC-HV vehicle-following pattern requires the largest minimum safe space headway, following by the HV-HV, PC-PC, and HV-PC vehicle-following patterns.
In summary, findings from this research reveal that there are diversities in the minimum safe vehicle-following distance for different vehicle-following patterns, indicating that the crash risks of different vehicle-following patterns vary. This presents some preliminary insights to transportation engineers in terms of the development of crash mitigation strategies such as HV access and lane use management, variable speed limits, and driver’s safety education on the selection of following headways, etc. In addition, with the increasing popularity of connected vehicle (CV) technology, the estimated minimum safe vehicle-following headways also present potentials to advance the development of real-time in-vehicle forward collision warnings to minimize the risk of rear-end crash.
Nevertheless, it is necessary to point out that the traffic flow data used by this research were collected from one representative freeway segment under normal weather condition, and crash risks were assessed solely based on vehicles’ speed, vehicle-following headways, and default driver behavior and vehicle dynamics performances. In practice, vehicle-following behavior under different demand levels might vary and tends to be affected by a wider range of factors such as roadway geometry configurations, driver demographical features, post speed limits, and weather conditions, etc. For instance, drivers usually keep a larger following distance under adverse weather conditions (e.g., rainy, foggy, snowy, windy weather) than under normal weather condition, and the changes in driving behavior will affect the safety performance assessment results. Therefore, further works should further investigate the impacts of these various factors on the safety performance of various vehicle-following patterns. The presented video-based data collection and extraction procedure could be used for similar research activities if the adverse weather event does not significantly impact the visibility of vehicles and pavement markings. In cases where the research site is under severe weather conditions such as heavy rain, dense fog, heavy snow, etc., this paper recommends using calibrated machine vision or machine learning technologies to process the capture videos to extract the vehicle-following headways.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}