Research on Transmission Network Expansion Planning Considering Splitting Control


Abstract
:1. Introduction
- The requirement for reliability is added to the optimization problem as constraints, usually including the overload constraints under N, N-1, even N-2, and N-K contingency-constrained grid operations [9,10]. However, most of the time, the economic operation of the power grid is the main optimization goal, which leads to the postponement of the safety analysis and complexity of computations.
- The requirement for reliability is converted into the economic cost in the objective function to obtain the least expensive plan. The cut-off load when the branch is overloaded is quantified as the load shedding compensation cost, and the expected amount of system power shortage is quantified as the power shortage cost. According to the load shedding compensation cost, and the power shortage cost, the level of power supply reliability is reflected [11,12].
- From the perspective of both reliability and economics, the planning is attained through multiobject programming. To be specific, it can be divided into two kinds. First, the benchmark could be the weighted sum of the requirement for reliability and economics. The weight could be determined by the theory of rough set, fuzzy set, credibility, and so forth [13,14]. Second, hierarchical planning theory could be used to construct a multiobject optimization model, thus, to find the optimal global solution by integrating modern heuristic algorithms and through iterations [15,16].
2. Weak Connection Lines
2.1. Slow Coherency Theory for Power System
2.2. Feasibility Analysis for Splitting the Weak Connection Lines
2.3. Identification and Screening of Weak Connection Lines in the System
2.3.1. Solving State Matrix A
2.3.2. Screening System Slow Mode Eigenvalues
2.3.3. Generator Coherence Clustering based on the Modified Cosine Similarity Factor
2.3.4. Calculate the Sensitivity of the Slow Mode Eigenvalue Group to Each Line
2.3.5. Screening Weak Connection Lines of the System
3. Double Level Programming Optimization Model of Transmission Network
3.1. Two-Level Programming Model of Transmission Network Considering Splitting Control
3.2. Objective Function
3.2.1. Weak Connection Coefficient of the System
3.2.2. Line Construction Cost
3.2.3. Network Loss Cost
3.2.4. Load shedding cost
3.3. Other Constraints
- (a)
- Network connectivity constraint:The planned grid structure needs to meet the most basic network topology connectivity.
- (b)
- AC power flow constraint (Equation (16)):
- (c)
- Node power balance constraints (Equation (17)):
- (d)
- Transmission capacity constraint (Equation (18)):
- (e)
- Generator node output constraint (Equation (19)):
- (f)
- A maximum number of line construction constraint (Equation (20)):
4. Solution Algorithm and Process
4.1. Particle Swarm Optimization Algorithm with Adaptive Mutation and Inertia Weight
4.1.1. Particle Speed and Position Update
4.1.2. Adaptive Mutation Operation
4.1.3. Adaptive Adjustment of Inertia Weight
4.2. Based on Topological Connectivity Repair Strategy of Boruvka Algorithm
4.3. Solution Flow
- (i)
- According to the initial data of the line, planning Figures are generated, and the initial parameters of the algorithm are initialized.
- (ii)
- Adjust inertia weight and mutation operation adaptively, update particle position, velocity, individual extremum, and population extremum.
- (iii)
- Judge whether the error between the two iterations is less than the threshold value; if it is reached, output the historical optimal solution, otherwise continue.
- (iv)
- Check the connectivity of the network and repair the connectivity of the disconnected planning Figure based on the Boruvka algorithm.
- (v)
- Power flow calculation, calculation of line construction cost, network loss cost, and load shedding cost.
- (vi)
- Transfer the planning Figure of the upper objective function to lower objective function, divide the planning Figures into groups of slow coherence, and calculate the weak connection coefficient of the system.
- (vii)
- In the form of the penalty function, reflect the fitness value of the lower objective function to the upper objective function, and go to step (ii).
5. Example Analysis
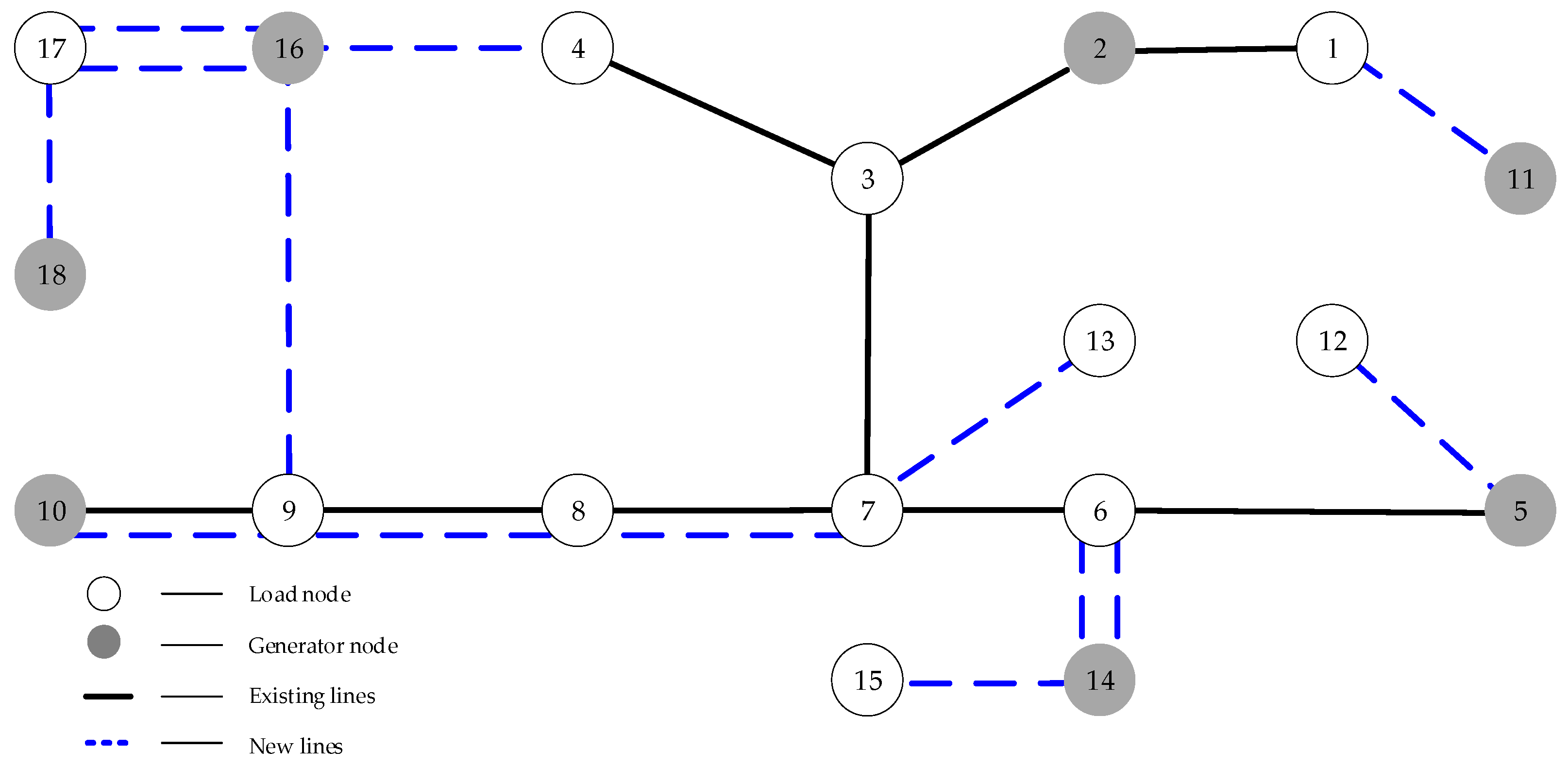
5.1. Planning Grid Analysis
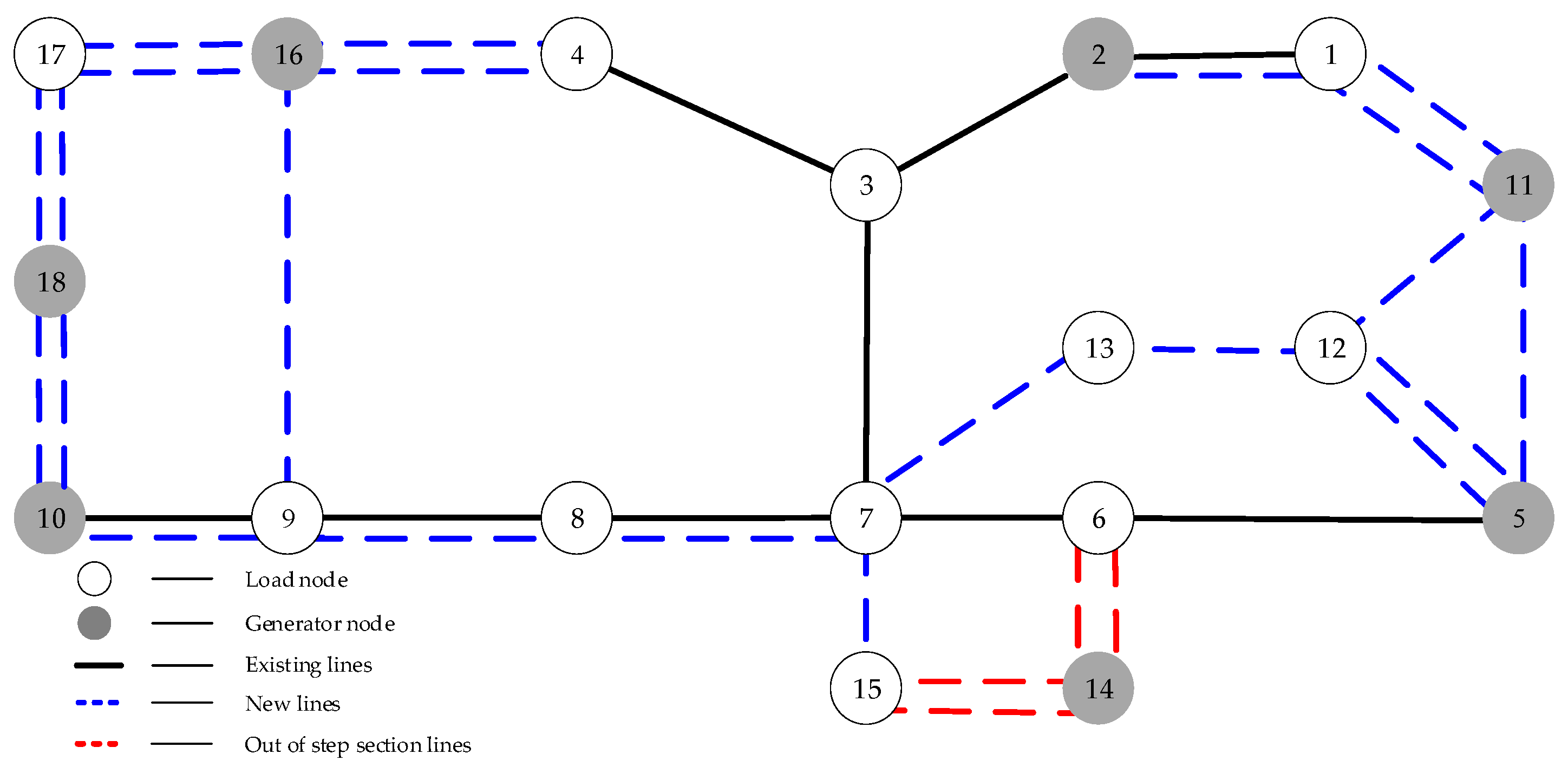
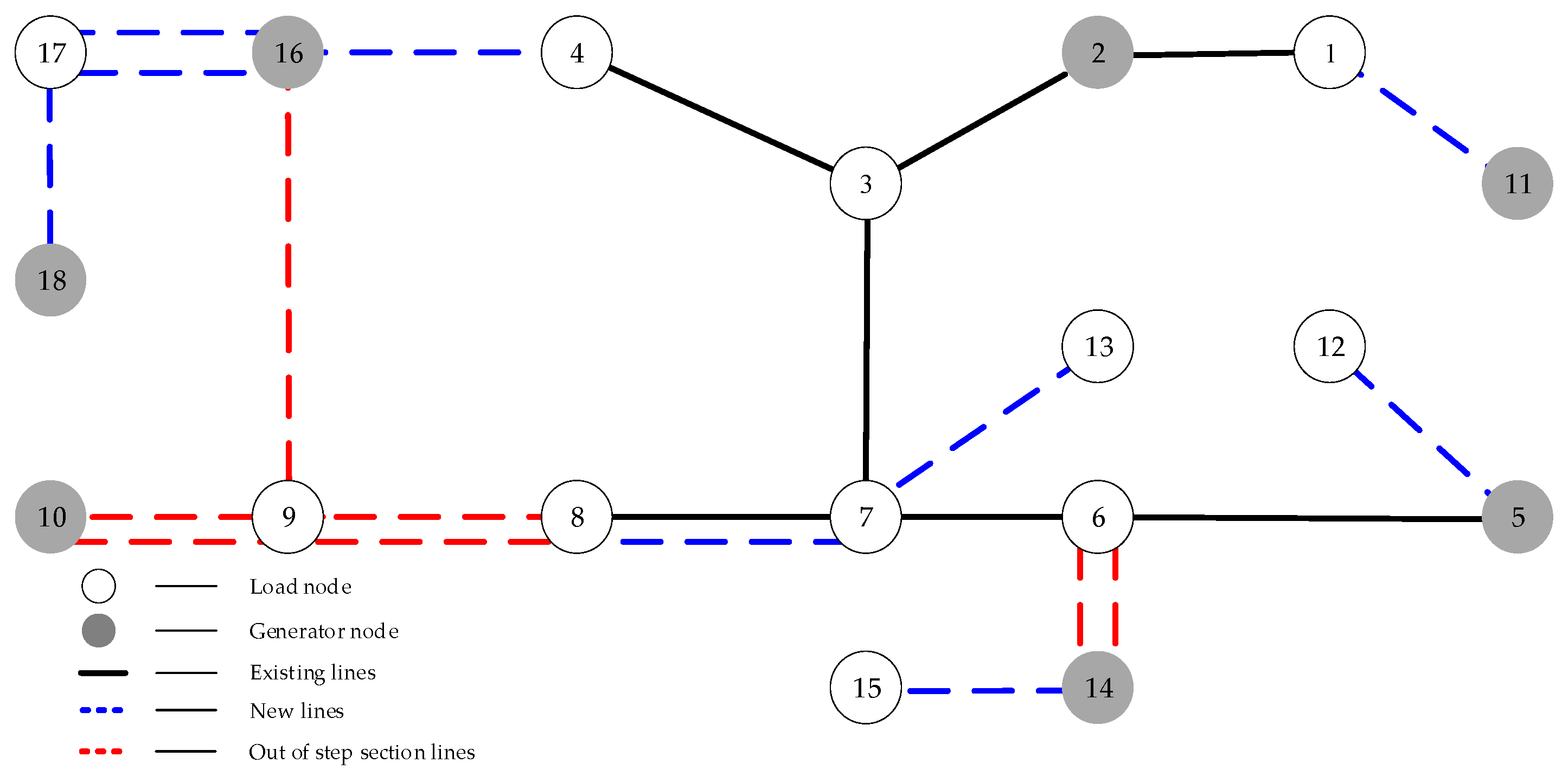
5.2. Feasibility Verification
5.2.1. When there is a Fault at the Weak Connection Lines of the System
5.2.2. In Case of Internal Line Fault in Slow Mode Area
5.3. Fault Simulation Comparison
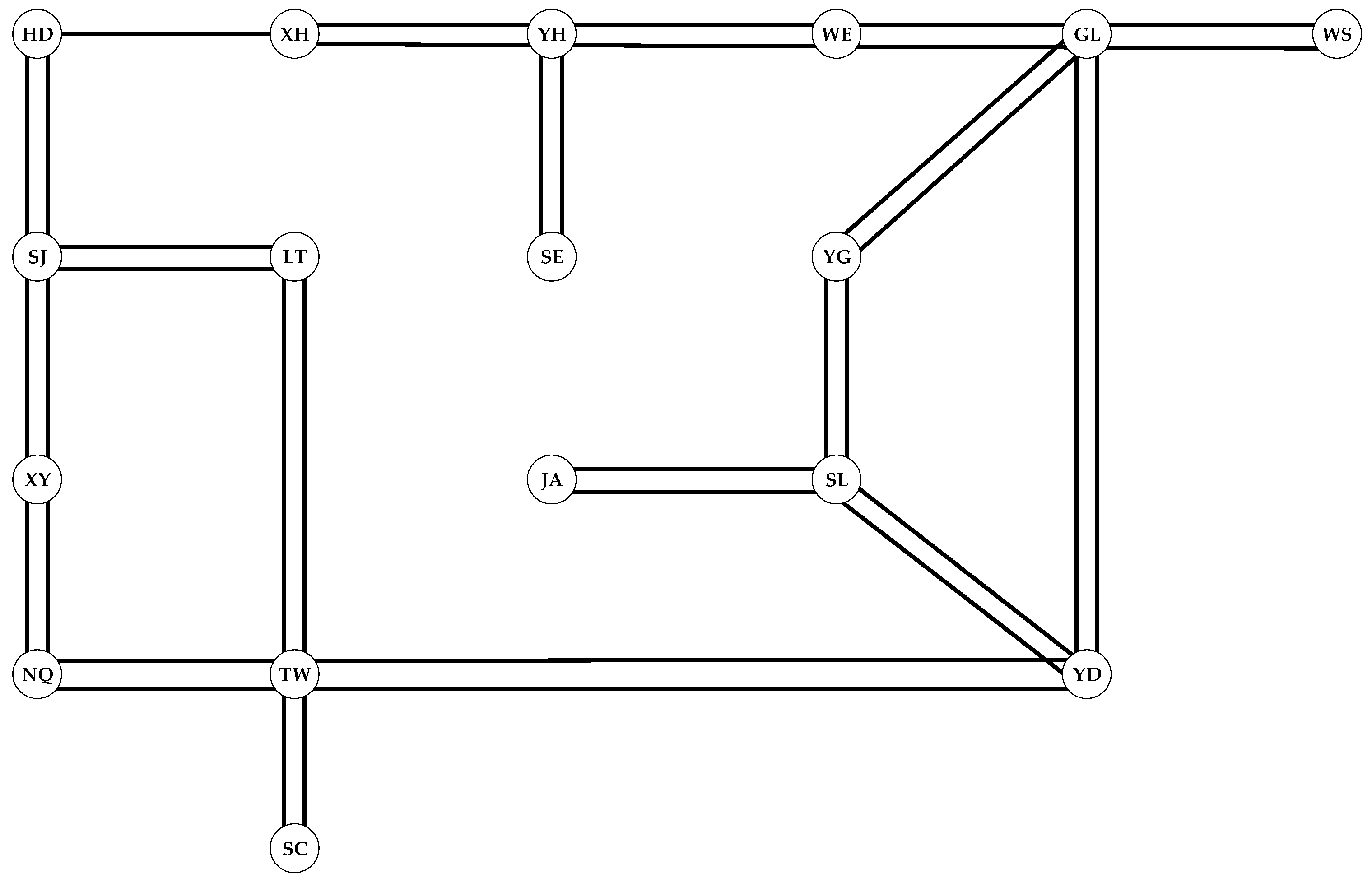
5.4. Simulation of Actual Power Grid
6. Conclusions
- Based on the modified cosine factor and graph theory, this paper proposes an improved method of identifying and screening the weak connection lines of the system, which can screen the weak connection lines more accurately and automatically, and does not rely on the judgment of the network topology.
- Compared with the traditional transmission network planning, this paper proposes the concept of weak connection coefficient of the system and establishes the double-layer planning model of the transmission network with the minimum weak connection coefficient as the optimization goal. The model can optimize the system partition, reduce the decision-making space of the splitting lines, and cooperate with the splitting control rapidly.
- In this paper, a hybrid algorithm based on Boruvka algorithm and particle swarm optimization algorithm with adaptive mutation and inertia weight is used to solve the IEEE 18 node standard calculation example and a real power grid in East China. Through PSD-BPA fault simulation of the planning results, the feasibility of the weak connection lines as the lines to be selected is verified, and the adaptability of the power grid operation state change is verified. Furthermore, the transmission network planning model proposed in this paper can better cooperate with the splitting control.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| IEEE | Institute of Electrical and Electronics Engineers |
| PSD-BPA | Power System Department—Bonneville Power Administration |
| N, N-1, N-2, N-K | any K (0, 1, …, K) independent components of the N components of the power system are removed after failure, without damaging the stability of the system. |
| PSO | Particle Swarm Optimization |
| MW | megawatt |
| AC | Alternating Current |
| p. u. | per unit |
| XH, HD, SJ, XY, NQ, TW, LT, YD, SL, JA, YG, GL, YH, WE | place name |
| G2, G5, G10, G11, G14, G16, G18 | generator number |
| Parameters | |
| A | state matrix |
| n | number of generator sets |
| Ω | rated frequency |
| δi | rotor angle of generator i |
| ωi | speed of the generator i |
| Hi | the inertia time constant of the generator i |
| Di | damping constant |
| Pmi | the mechanical input power of the generator i |
| Pei | the electromagnetic output of the generator i |
| Ei, Ej | potential vector amplitude of the generator i and j considering transient reactance |
| δij | power angle difference between the generator i and j |
| Gij | the real part of the reduced node admittance matrix of the system |
| Bij | the imaginary part of the reduced node admittance matrix of the system |
| Yij | reduced node admittance matrix of the system |
| Pei0 | generator power steady-state value |
| δi0 | generator power angle steady-state value |
| K | system state matrix |
| Lij | clustering matrix |
| the lower limit of line sensitivity | |
| the upper limit of line sensitivity | |
| a | fund discount rate |
| r | construction years |
| k1 | line construction cost per unit length |
| Li | length of line i |
| ml | line set |
| τi | annual loss hours of electric energy of line i |
| k2 | unit electricity price |
| ri | the resistance of line i |
| Ui | the voltage of line i |
| k3 | unit load cut-off compensation cost |
| Vi, Vj | the voltage of node i and j |
| θij | phase angle difference between node i and node j |
| PG,i, QG,i | active power output and reactive power output of node i |
| PL,i, QL,i | active load and a reactive load of node i |
| Pijmax | maximum line capacity |
| PG | generator power output |
| PG, min, PG, max | minimum and maximum generator power output |
| limax | maximum number of lines |
| ω | inertia weight |
| d | current particle |
| c1, c2 | learning factor |
| r1, r2 | random variable between [0,1] |
| pid | individual extremum |
| pgd | population extremum |
| p | mutation threshold |
| η | random variables obeying [0,1] Gaussian distribution |
| μ | random variable between [0,1] |
| ωstart, ωend | the initial and final inertia weight |
| tmax | maximum number of iterations |
| K | constant |
| Eq′, Ed′ | transient direct axis and quadrature axis electromotive force |
| Variables | |
| x | system state variable |
| λi | eigenvalues of the system state matrix |
| σi | eigenvalues of second-order systems |
| μm | a set of eigenvalues for the system state matrix |
| m | number of slow mode eigenvalues |
| vi | characteristic variables of slow mode eigenvalues |
| vmo | mean value of a characteristic variable of slow mode eigenvalue |
| the sensitivity of slow mode eigenvalues λi to line l | |
| l | transmission line |
| the sensitivity of slow mode eigenvalue group to line l | |
| k | number of weak connection lines |
| F1 | upper objective function |
| C1 | line construction cost |
| C2 | network loss cost |
| C3 | load shedding cost |
| F2 | lower-level objective function |
| C0 | weak connection coefficient of the system |
| U | penalty value for not meeting the lower constraint |
| li | number of new circuits of line i |
| Pi | active power transmitted by line i |
| , | removal load under N and N-1 conditions |
| vid | particle velocity |
| xid | particle position |
| ωt | current inertia weight |
| t | iteration times |
References
- Xiao, C.F.; Tang, F.; Liu, D.C. Power Transmission Network Expansion Planning Research Considering System Weak Connection Recognition. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 191–195. [Google Scholar]
- Wu, W.P.; Hu, Z.C. Transmission Network Expansion Planning Based on Chronological Evaluation Considering Wind Power Uncertainties. IEEE Trans. Power Syst. 2018, 33, 4787–4796. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhou, Q.M.; Yu, H.Q. Splitting control decision Figure design and splitting control analysis in a provincial power grid. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 2338–2342. [Google Scholar]
- Tang, F.; Yang, J. Out-of-step oscillation splitting criterion based on bus voltage frequency. J. Mod. Power Syst. Clean Energy 2015, 3, 341–352. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.Y. Analysis of Brazilian blackout on 21st March 2018, and revelations to security for human grid. In Proceedings of the 2019 4th International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yichang, China, 6–9 September 2019; pp. 1–5. [Google Scholar]
- Licia, P.; Carlos, R.M. The Venezuelan energy crisis: Renewable energies in the transition towards sustainability. Renew. Sustain. Energy Rev. 2019, 105, 415–426. [Google Scholar]
- Zhang, S.; Zhang, Y.X. A Novel Out-of-Step Splitting Protection Based on the Wide Area Information. IEEE Trans. Smart Grid 2017, 8, 41–51. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, Y.X. Characteristic Analysis and Calculation of Frequencies of Voltages in Out-of-Step Oscillation Power System and a Frequency-Based Out-of-Step Protection. IEEE Trans. Power Syst. 2019, 34, 205–214. [Google Scholar] [CrossRef]
- Stott, B.; Marinho, J.L. Linear programming for power-system network security applications. IEEE Trans. Power App. Syst. 1979, 98, 837–848. [Google Scholar] [CrossRef]
- Street, A.; Oliveira, F. Contingency-constrained unit commitment with n-k security criterion: A robust optimization approach. IEEE Trans. Power Syst. 2011, 26, 1581–1590. [Google Scholar] [CrossRef]
- Reddy, S.S. Multi-Objective Based Congestion Management Using Generation Rescheduling and Load Shedding. IEEE Trans. Power Syst. 2017, 32, 852–863. [Google Scholar]
- Kroposki, B.; Sen, P.K. Optimum sizing and placement of distributed and renewable energy sources in electric power distribution systems. IEEE Trans. Ind. Apps. 2013, 49, 2741–2752. [Google Scholar] [CrossRef]
- Sajad, N.R.; Nazanin, J. Smart distribution grid multistage expansion planning under load forecasting uncertainty. IET Gener. Transm. Distrib. 2016, 10, 1136–1144. [Google Scholar]
- Li, Z.H.; Lin, Y.; Chen, W.H. Fuzzy comprehensive evaluation for transmission grid planning based on combination weight. In Proceedings of the International Conference on Power and Energy, CPE 2014, Shanghai, China, 29–30 November 2014; pp. 91–96. [Google Scholar]
- Yorino, N.; Abdillah, M. Robust Power System Security Assessment Under Uncertainties Using Bi-Level Optimization. IEEE Trans. Power Syst. 2017, 33, 352–362. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K. Optimal vehicle to grid planning and scheduling using double layer multi-objective algorithm. Energy 2016, 112, 1060–1073. [Google Scholar] [CrossRef]
- Ni, J.M.; Shen, C. An on-line weak-connection identification method for controlled islanding of power system. Proc. Chinese Soc. Electr. Eng. 2011, 31, 24–30. [Google Scholar]
- Yang, Y.G.; Duan, Q.G.; Wu, G.B. Slow coherency based adaptive controlled islanding Figure of the China Southern Power Grid. In Proceedings of the 2015 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Brisbane, Australia, 15–18 November 2015; pp. 1–5. [Google Scholar]
- Li, M.X. An improved fcm clustering algorithm based on cosine similarity. In Proceedings of the 2019 International Conference on Data Mining and Machine Learning, ICDMML 2019, Hong Kong, China, 28–30 April 2019; pp. 103–109. [Google Scholar]
- Ma, Z.Y.; Liu, F. Fast Searching Strategy for Critical Cascading Paths Toward Blackouts. IEEE Access 2018, 6, 36874–36886. [Google Scholar] [CrossRef]
- Alinezhad, B.; Karegar, H.K. Out-of-Step Protection Based on Equal Area Criterion. IEEE Trans. Power Syst. 2017, 32, 968–977. [Google Scholar] [CrossRef]
- Song, H.L.; Wu, J.Y. A wide-area measurement systems-based adaptive strategy for controlled islanding in bulk power systems. Energies 2014, 7, 2631–2657. [Google Scholar] [CrossRef] [Green Version]
- Kokotovic, P.V.; Avramovic, B. Coherency based decomposition and aggregation. Automatica 1982, 18, 47–56. [Google Scholar] [CrossRef]
- Chow, J.H.; Kokotovic, P.V. Decomposition of near-optimum regulators for systems with slow and fast modes. IEEE Trans. Autom. Control 1976, 21, 701–705. [Google Scholar] [CrossRef]
- Yang, B.; Vittal, V. Slow-Coherency-Based Controlled Islanding—A Demonstration of the Approach on the August 14, 2003 Blackout Scenario. IEEE Trans. Power Syst. 2006, 21, 1840–1847. [Google Scholar] [CrossRef]
- Wang, X.M.; Vittal, V. Tracing generator coherency indices using the continuation method: A novel approach. IEEE Trans. Power Syst. 2005, 20, 1510–1518. [Google Scholar] [CrossRef]
- Ni, J.M.; Shen, C. Adaptive islanding control based on slow coherency-Part II: Practical area partition method. Proc. Chinese Soc. Electr. Eng. 2014, 34, 4865–4875. [Google Scholar]
- Xu, G.Y.; Vittal, V. Slow Coherency Based Cutset Determination Algorithm for Large Power Systems. IEEE Trans. Power Syst. 2010, 25, 877–884. [Google Scholar] [CrossRef]
- Seo, J.H.; Im, C.H. Multimodal function optimization based on particle swarm optimization. IEEE Trans. Magn. 2006, 42, 1095–1098. [Google Scholar] [CrossRef]
- Zhang, J.T.; Xia, P.Q. An improved PSO algorithm for parameter identification of nonlinear dynamic hysteretic models. J. Sound Vibr. 2017, 389, 153–167. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Generator Output (MW) | Load (MW) |
|---|---|---|
| 1 | 0 | 55 |
| 2 | 360 | 84 |
| 3 | 0 | 154 |
| 4 | 0 | 38 |
| 5 | 760 | 639 |
| 6 | 0 | 199 |
| 7 | 0 | 213 |
| 8 | 0 | 88 |
| 9 | 0 | 259 |
| 10 | 750 | 94 |
| 11 | 540 | 700 |
| 12 | 0 | 190 |
| 13 | 0 | 110 |
| 14 | 540 | 32 |
| 15 | 0 | 200 |
| 16 | 495 | 132 |
| 17 | 0 | 400 |
| 18 | 142 | 0 |
| Number of Line | Ends Node | AC Resistance (p.u.) | AC reactance (p.u.) | Length (km) | Capacity (MW) | Number of Existing Lines | Number of Lines That Can be Built |
|---|---|---|---|---|---|---|---|
| 1 | 1–2 | 0.001 | 0.0176 | 70 | 230 | 1 | 3 |
| 2 | 1–11 | 0.001 | 0.0102 | 40 | 230 | 0 | 3 |
| 3 | 2–3 | 0.001 | 0.0348 | 138 | 230 | 1 | 3 |
| 4 | 3–4 | 0.001 | 0.0404 | 155 | 230 | 1 | 3 |
| 5 | 3–7 | 0.001 | 0.0325 | 129 | 230 | 1 | 3 |
| 6 | 4–7 | 0.001 | 0.0501 | 200 | 230 | 0 | 3 |
| 7 | 4–16 | 0.001 | 0.0501 | 200 | 230 | 0 | 3 |
| 8 | 5–6 | 0.001 | 0.0267 | 106 | 230 | 1 | 3 |
| 9 | 5–11 | 0.001 | 0.0153 | 60 | 230 | 0 | 3 |
| 10 | 5–12 | 0.001 | 0.0102 | 40 | 230 | 0 | 3 |
| 11 | 6–7 | 0.001 | 0.0126 | 50 | 230 | 1 | 3 |
| 12 | 6–13 | 0.001 | 0.0126 | 50 | 230 | 0 | 3 |
| 13 | 6–14 | 0.001 | 0.0554 | 220 | 230 | 0 | 3 |
| 14 | 7–8 | 0.001 | 0.0151 | 60 | 230 | 1 | 3 |
| 15 | 7–9 | 0.001 | 0.0318 | 126 | 230 | 0 | 3 |
| 16 | 7–13 | 0.001 | 0.0126 | 50 | 230 | 0 | 3 |
| 17 | 7–15 | 0.001 | 0.0448 | 178 | 230 | 0 | 3 |
| 18 | 8–9 | 0.001 | 0.0102 | 40 | 230 | 1 | 3 |
| 19 | 9–10 | 0.001 | 0.0501 | 200 | 230 | 1 | 3 |
| 20 | 9–16 | 0.001 | 0.0501 | 200 | 230 | 0 | 3 |
| 21 | 10–18 | 0.001 | 0.0255 | 100 | 230 | 0 | 3 |
| 22 | 11–12 | 0.001 | 0.0126 | 50 | 230 | 0 | 3 |
| 23 | 11–13 | 0.001 | 0.0255 | 100 | 230 | 0 | 3 |
| 24 | 12–13 | 0.001 | 0.0153 | 60 | 230 | 0 | 3 |
| 25 | 14–15 | 0.001 | 0.0428 | 170 | 230 | 0 | 3 |
| 26 | 16–17 | 0.001 | 0.0153 | 60 | 230 | 0 | 3 |
| 27 | 17–18 | 0.001 | 0.0140 | 55 | 230 | 0 | 3 |
| Planning Figure | Figure 1: Transmission Network Planning Results Considering Splitting Control | Figure 2: Transmission Network Planning Results Considering the Economy |
|---|---|---|
| Number of new lines and circuits | 1–2(1), 1–11(2) 4–16(2), 5–11(1) 5–12(2), 6–14(2) 7–8(1), 7–13(1) 7–15(1), 8–9(1) 9–10(1), 9–16(1) 10–18(2), 11–12(1) 12–13(1), 14–15(2) 16–17(2), 17–18(2) | 1–11(1), 4–16(1) 5–12(1), 6–14(2) 7–8(1), 8–9(1) 7–13(1), 9–10(1) 9–16(1), 14–15(1) 16–17(2), 17–18(1) |
| Total investment cost/106 $ | 26.2 | 15.7 |
| Load shedding cost/104 $ | 0 | 1.27 |
| N-1 load shedding cost/104 $ | 0.06 | 88.67 |
| Weak connection coefficient | 0.171 | 0.173 |
| Figure | Number of New Lines and Circuits |
|---|---|
| Transmission network planning results considering splitting control | HD-SJ (1), HD-XH (1), SJ-XY (1) XY-NQ (1), SL-JA (1), GL-YD (1) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, F.; Xiao, C.; Gao, X.; Zhang, Y.; Du, N.; Hu, B. Research on Transmission Network Expansion Planning Considering Splitting Control. Sustainability 2020, 12, 1769. https://doi.org/10.3390/su12051769
Tang F, Xiao C, Gao X, Zhang Y, Du N, Hu B. Research on Transmission Network Expansion Planning Considering Splitting Control. Sustainability. 2020; 12(5):1769. https://doi.org/10.3390/su12051769
Chicago/Turabian StyleTang, Fei, Chufei Xiao, Xin Gao, Yifan Zhang, Nianchun Du, and Benxi Hu. 2020. "Research on Transmission Network Expansion Planning Considering Splitting Control" Sustainability 12, no. 5: 1769. https://doi.org/10.3390/su12051769
APA StyleTang, F., Xiao, C., Gao, X., Zhang, Y., Du, N., & Hu, B. (2020). Research on Transmission Network Expansion Planning Considering Splitting Control. Sustainability, 12(5), 1769. https://doi.org/10.3390/su12051769