Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Research
1.2. Research of This Article
2. Related Research on the Solution Architecture Oriented to Network Slicing Service and Vehicle-Road Co-Location
2.1. Customized Network Slicing Strategy
2.2. Positioning Strategy
3. The Proposed Method
3.1. Research on the Vehicle-Road Cooperative Combination Positioning Method Based on Beidou
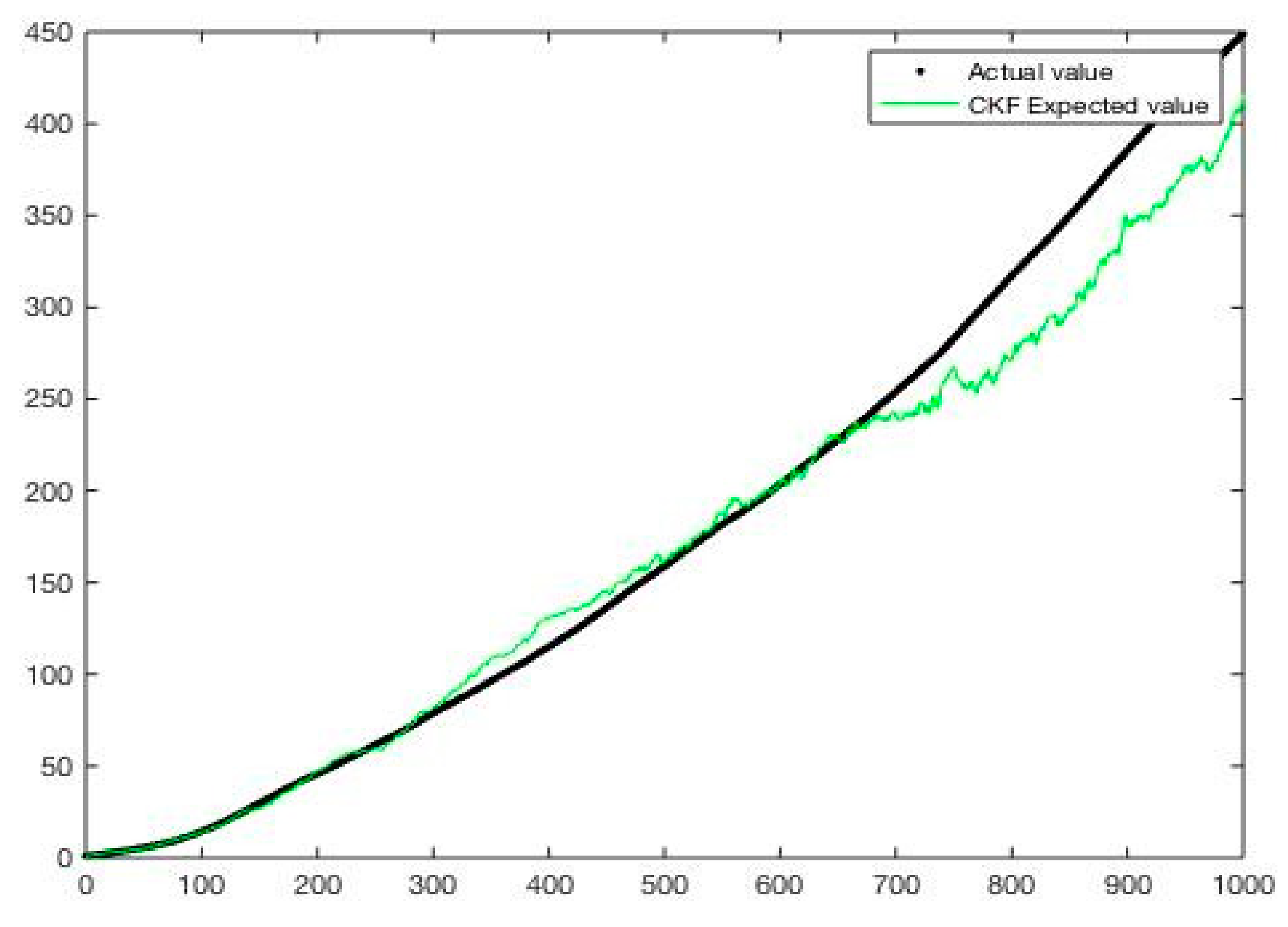
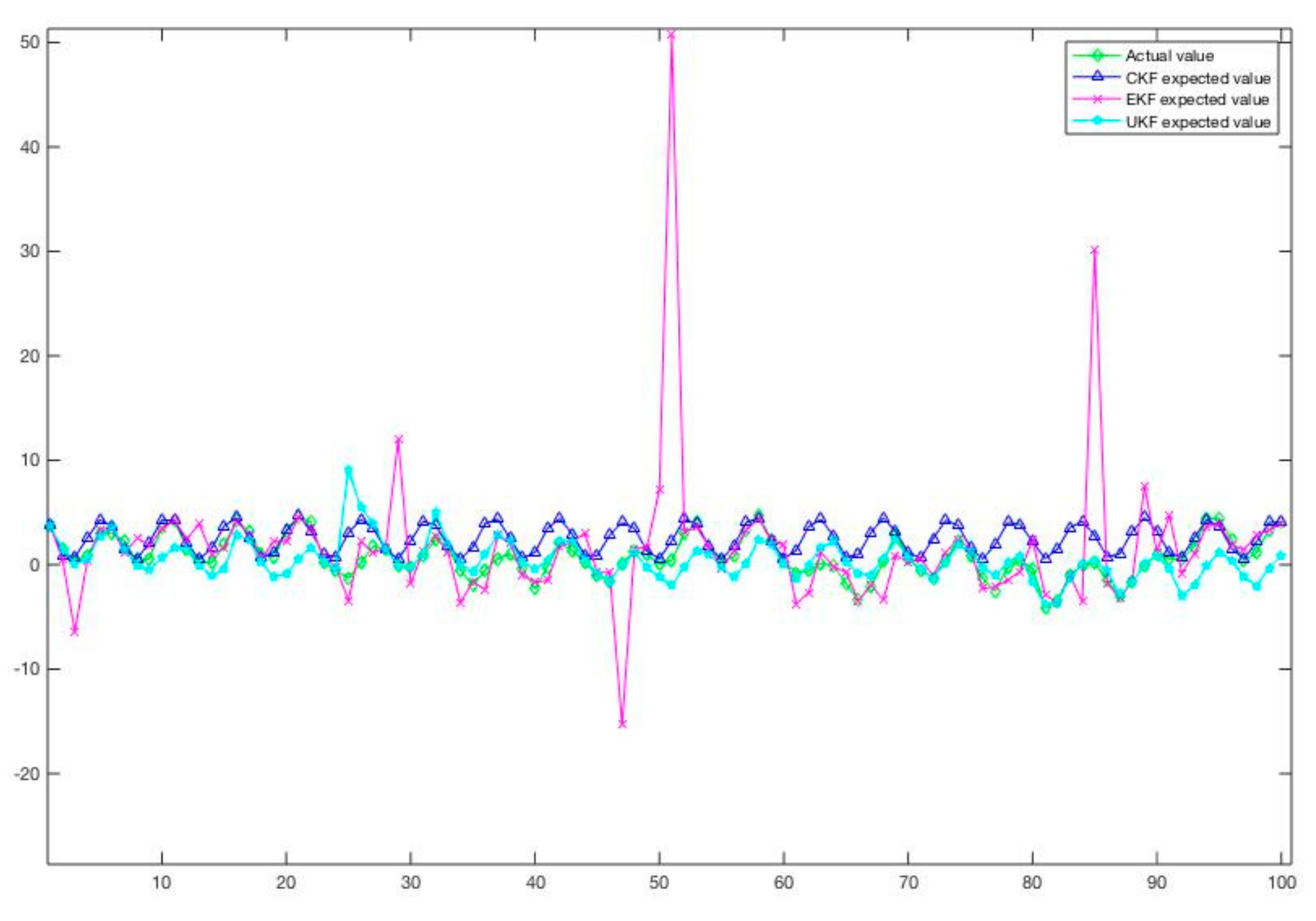
3.2. CKF-Based Combined Positioning Algorithm to Achieve Data Fusion
3.2.1. Time Update Module
3.2.2. Measurement Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hettikankanama, H.K.S.K.; Vasanthapriyan, S. Integrating Smart Transportation System for a Proposed Smart City: A Mapping Study. In Proceedings of the 2019 International Research Conference on Smart Computing and Systems Engineering (SCSE), Colombo, Sri Lanka, 28 March 2019; pp. 196–203. [Google Scholar] [CrossRef]
- Tadic, S.; Favenza, A.; Kavadias, C.; Tsagaris, V. GHOST: A novel approach to smart city infrastructures monitoring through GNSS precise positioning. In Proceedings of the 2016 IEEE International Smart Cities Conference (ISC2), Trento, Italy, 12–15 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, Y.; Zhou, D.; Wang, H.; Jiang, Y.; Jiang, Y.; Ma, X. Vehicle Aided Positioning Method Based on Intelligent Identification. In Proceedings of the 2019 34rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Jinzhou, China, 6–8 June 2019; pp. 493–498. [Google Scholar] [CrossRef]
- Liu, S.; He, D.; Xu, Y.; Zhang, C.; Sun, S.; Ru, D. Adaptive Vehicle Cooperative Positioning System with Uncertain GPS Visibility and Neural Network-based Improved Approach. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Beijing, China, 16–18 August 2018; pp. 303–308. [Google Scholar]
- Gerges, R.L.; Shynk, J.J.; Hwang, S.-S. High-accuracy vehicle position estimation using a cooperative algorithm with anchors and probe vehicles. In Proceedings of the 2015 49th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 8–11 November 2015; pp. 661–665. [Google Scholar]
- Shieh, W.-Y.; Hsu, C.-C.J.; Lin, C.-H.; Wang, T.-H. Investigation of Vehicle Positioning by Infrared Signal-Direction Discrimination for Short-Range Vehicle-to-Vehicle Communications. IEEE Trans. Veh. Technol. 2018, 67, 11563–11574. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Lu, H.; Li, J. Study on application status and standard system of BDS in transportation. In Proceedings of the 2017 Forum on Cooperative Positioning and Service (CPGPS), Harbin, China, 19–21 May 2017; pp. 167–173. [Google Scholar] [CrossRef]
- Park, C.-H.; Han, J.-H. Performance Evaluation of GNSS and Motion Sensor Integrated Positioning Algorithm for Land Vehicle Monitoring. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 21–23 October 2020; pp. 1592–1595. [Google Scholar]
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit Cooperative Positioning in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3964–3980. [Google Scholar] [CrossRef] [Green Version]
- Jia, W.; Cai, C.; Wu, Q.; Li, S.; Zheng, J. Research on High Precision Dynamic Relative Positioning Technology Based on the Third Generation BDS. In Proceedings of the 2020 IEEE 3rd International Conference of Safe Production and Informatization (IICSPI), Chongqing, China, 28–30 November 2020; pp. 304–312. [Google Scholar]
- Lim, J.; Choi, K.H.; Kim, L.; Lee, H.K. Land vehicle positioning in urban area by integrated GPS/BeiDou/OBD-II/MEMS IMU. In Proceedings of the 2016 IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 20–22 August 2016; pp. 176–180. [Google Scholar]
- Luo, K.; Zhong, M.; Yang, Y. Combined Positioning Method of Port AGV based on Beidou Difference and Inertial Navigation Technology. In Proceedings of the 2019 International Conference on Sensing and Instrumentation in IoT Era (ISSI), Lisbon, Portugal, 29–30 August 2019; pp. 1–6. [Google Scholar]
- Rivera, J.J.D.; Khan, T.A.; Mehmood, A.; Song, W.-C. Network Slice Selection Function for Data Plane Slicing in a Mobile Network. In Proceedings of the 2019 20th Asia-Pacific Network Operations and Management Symposium (APNOMS), Matsue, Japan, 18–20 September 2019; pp. 1–4. [Google Scholar]
- Martiradonna, S.; Abrardo, A.; Moretti, M.; Piro, G.; Boggia, G. Architecting RAN Slicing for URLLC: Design Decisions and Open Issues. In Proceedings of the 2019 IEEE/ACM 23rd International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Cosenza, Italy, 7–9 October 2019; pp. 1–4. [Google Scholar]
- Mouawad, N.; Naja, R.; Tohme, S. Inter-Slice Mobility Management Solution In V2X Environment. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–6. [Google Scholar]
- Vilalta, R.; Alemany, P.; Sedar, R.; Kalalas, C.; Casellas, R.; Martinez, R.; Vazquez-Gallego, F.; Ortiz, J.; Skarmeta, A.; Alonso-Zarate, J.; et al. Applying Security Service Level Agreements in V2X Network Slices. In Proceedings of the 2020 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN), Leganes, Spain, 10–12 November 2020; pp. 114–115. [Google Scholar]
- Kourtis, M.-A.; Anagnostopoulos, T.; Kuklilski, S.; Wierzbicki, M.; Oikonomakis, A.; Xilouris, G.; Chochliouros, I.P.; Yi, N.; Kostopoulos, A.; Tomaszewski, L.; et al. 5G Network Slicing Enabling Edge Services. In Proceedings of the 2020 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN), Leganes, Spain, 10–12 November 2020; pp. 155–160. [Google Scholar]
- Fan, Y.; Wang, P.; Yu, J.; Wang, S.; Yu, W.; Li, J.; Yan, N.; He, D.; Chen, X. Accuracy Analysis on the Beidou /INS Integrated Navigation based on the Field Trial. In Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 19–21 November 2018; pp. 1–5. [Google Scholar]
- Wang, S.; Zhang, H.; Shihui, Z.; Wang, B. Passive Localization Method Based on Cubature Kalman Filter. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 650–654. [Google Scholar]
- Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Improving the RISS/GNSS Land-Vehicles Integrated Navigation System Using Magnetic Azimuth Updates. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1250–1263. [Google Scholar] [CrossRef]
- Ravipati, D.; Chour, K.; Nayak, A.; Marr, T.; Dey, S.; Gautam, A.; Rathinam, S.; Swaminathan, G. Vision Based Localization for Infrastructure Enabled Autonomy. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1638–1643. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Sun, S. Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video. Sustainability 2021, 13, 5334. https://doi.org/10.3390/su13105334
Ma Z, Sun S. Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video. Sustainability. 2021; 13(10):5334. https://doi.org/10.3390/su13105334
Chicago/Turabian StyleMa, Zhi, and Songlin Sun. 2021. "Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video" Sustainability 13, no. 10: 5334. https://doi.org/10.3390/su13105334
APA StyleMa, Z., & Sun, S. (2021). Research on Vehicle-Road Co-Location Method Oriented to Network Slicing Service and Traffic Video. Sustainability, 13(10), 5334. https://doi.org/10.3390/su13105334