
Does a Test Ride Influence Attitude towards Autonomous Vehicles? A Field Experiment with Pretest and Posttest Measurement


Abstract
:1. Introduction
2. Literature Review
2.1. Socio-Demographic Findings
2.2. The Influence of Experience on Affective Attitude and Behavioural Intention
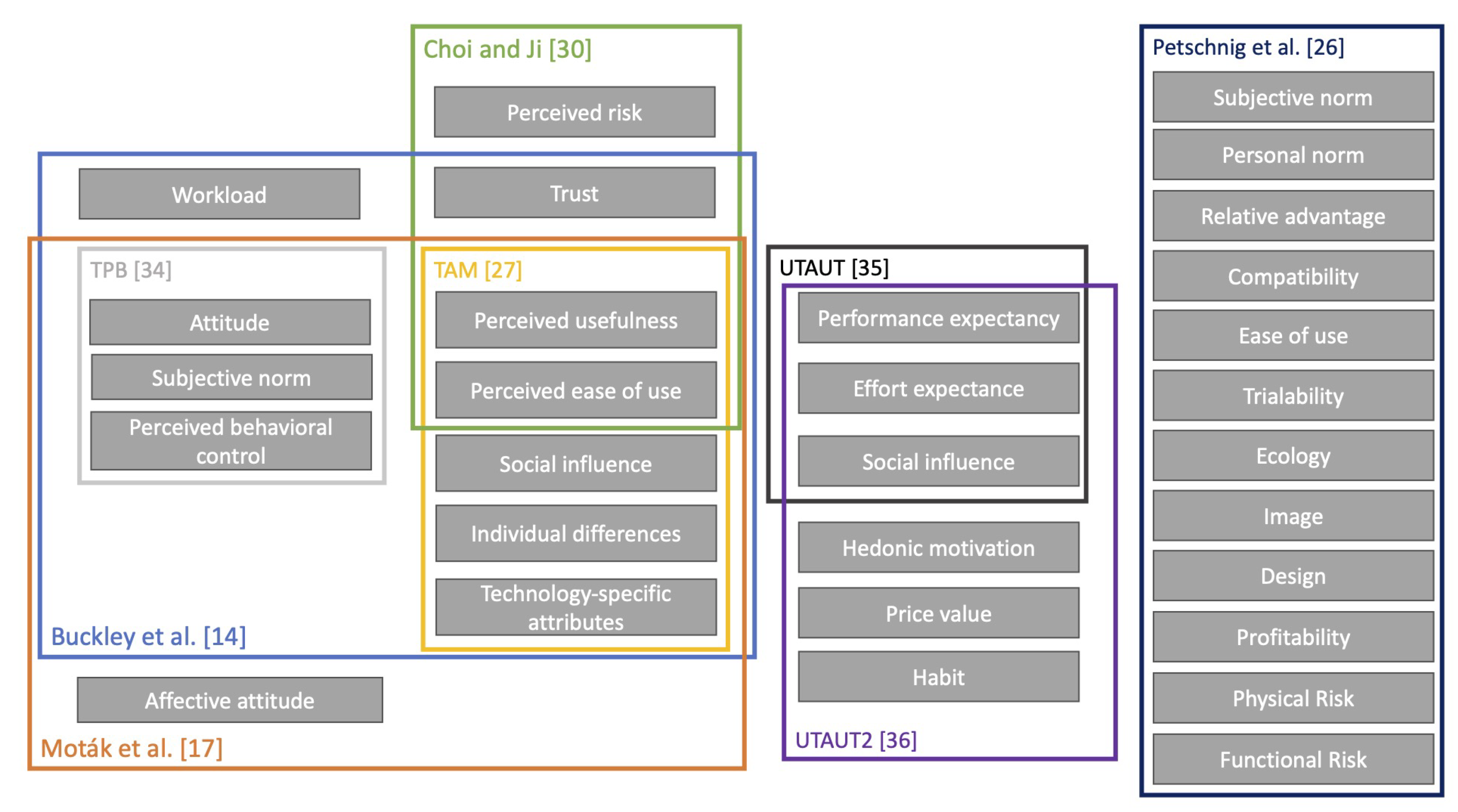
2.3. Capturing Intention to Adopt with Technology Acceptance Models
3. Materials and Methods
3.1. Survey Constructs and Items
3.2. Measurement and Analysis
3.3. Procedure
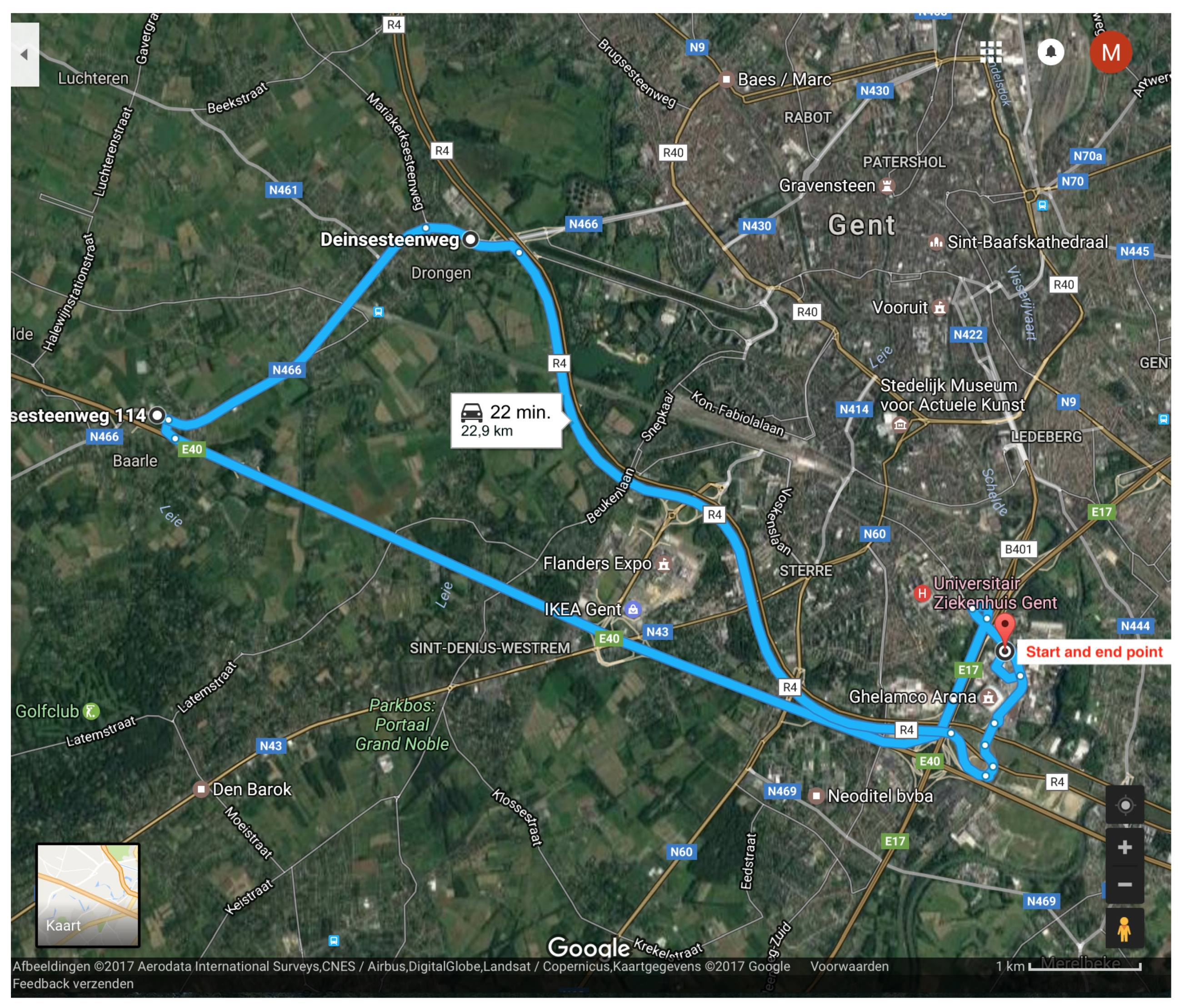
3.4. Driving Scenario
4. Results
4.1. Sample Characteristics
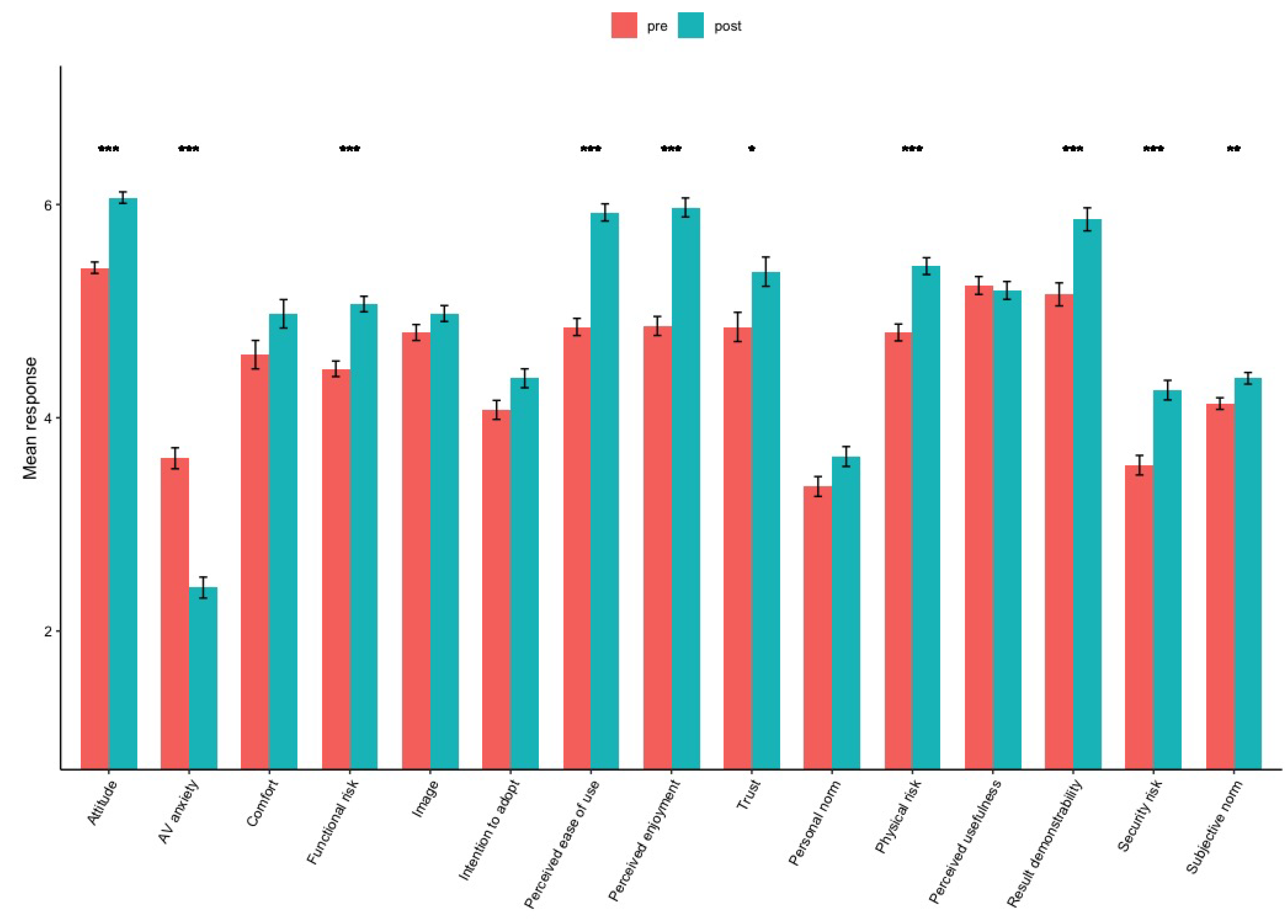
4.2. The Influence of Direct Experience
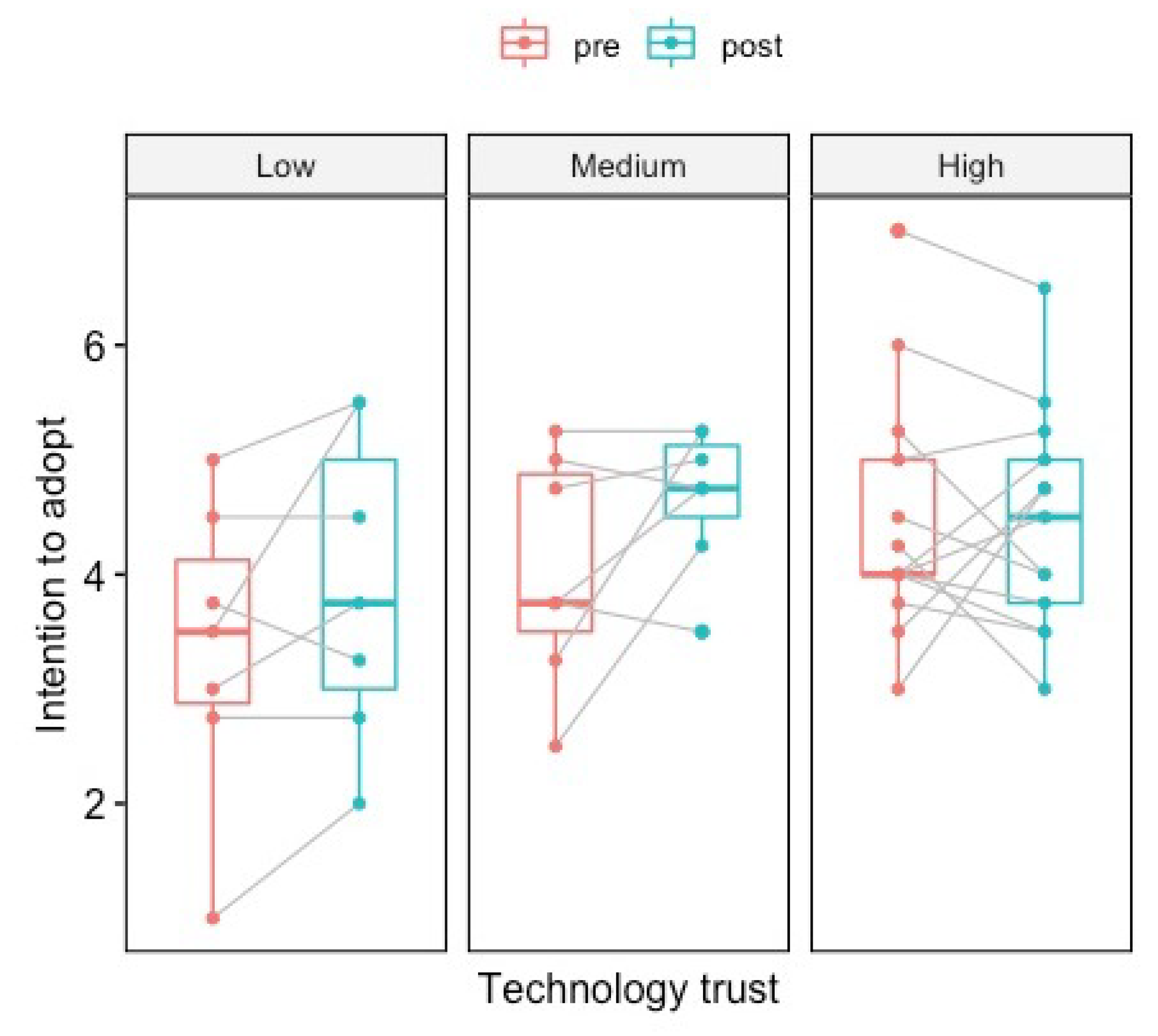
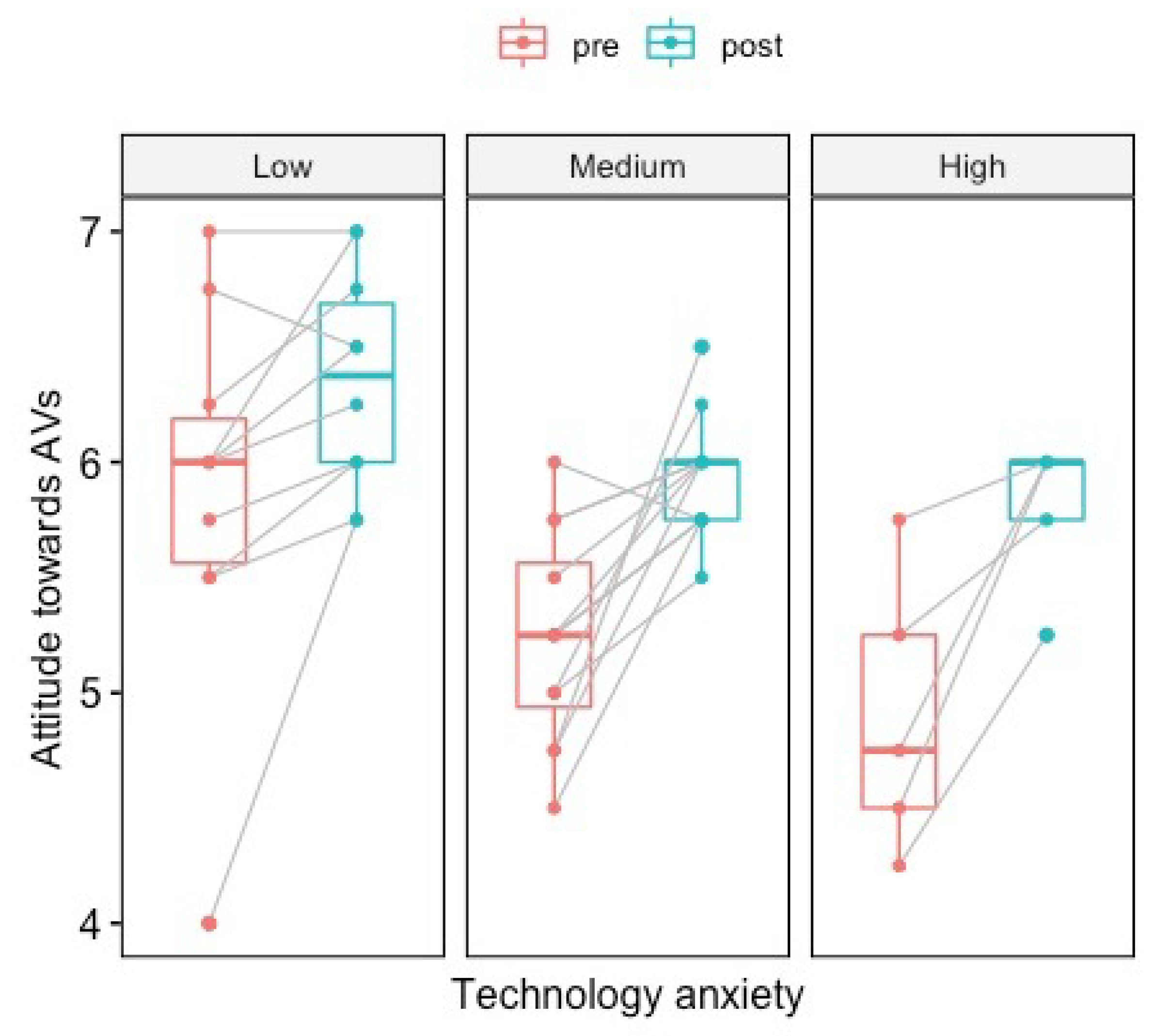
4.3. General Technology Stance
5. Discussion
5.1. Reflection on the Findings
5.2. Limitations of the Study
5.3. Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADAS | advanced driver-assistance systems |
| AV | autonomous vehicle |
| TAM | Technology Acceptance Model |
| TPB | Theory of Planned Behaviour |
| UTAUT | Unified Theory of Acceptance and Use of Technology |
Appendix A. Survey Construct and Items

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construct & Items | Reference |
|---|---|
| Perceived Ease of Use | |
| Venkatesh and Bala [28] |
| Perceived Enjoyment | |
| Venkatesh and Bala [28] |
| Autonomous Vehicle Anxiety | |
| Venkatesh and Bala [28] |
| Perceived Usefulness | |
| Venkatesh and Bala [28] |
| Image | |
| Petschnig et al. [26] |
| Result Demonstrability | |
| Venkatesh and Bala [28] |
| Comfort Benefit | |
| Items developed for research context based on Planing and Britzelmaier [43] |
| Trust | |
| Choi and Ji [30] |
| Physical Risk | |
| Petschnig et al. [26] |
| Functional Risk | |
| Petschnig et al. [26] |
| Security Risk | |
| Item developed for research context based on Kyriakidis et al. [5] |
| Subjective Norm | |
| Petschnig et al. [26] |
| Personal Norm | |
| Petschnig et al. [26] |
| Attitude towards Autonomous Vehicles | |
| Petschnig et al. [26] |
| Intention to Adopt Autonomous Vehicles | |
Assume autonomous vehicles are readily available on the market:
| Petschnig et al. [26] |
| Technology Anxiety | |
| Meuter et al. [44] |
| General trust in technology | |
| Mcknight et al. [45] |
References
- SAE International. J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; Technical Report; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Shared autonomous vehicle services: A comprehensive review. Transp. Res. Part C Emerg. Technol. 2020, 111, 255–293. [Google Scholar] [CrossRef]
- Etzioni, S.; Hamadneh, J.; Elvarsson, A.B.; Esztergár-Kiss, D.; Djukanovic, M.; Neophytou, S.N.; Sodnik, J.; Polydoropoulou, A.; Tsouros, I.; Pronello, C.; et al. Modeling Cross-National Differences in Automated Vehicle Acceptance. Sustainability 2020, 12, 9765. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; de Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef] [Green Version]
- Rödel, C.; Stadler, S.; Meschtscherjakov, A.; Tscheligi, M. Towards Autonomous Cars: The Effect of Autonomy Levels on Acceptance and User Experience. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the U.S., the U.K. and Australia; Technical Report UMTRI-2014-21 (July); The University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Schoettle, B.; Sivak, M. Public Opinion About Self-Driving Vehicles in China, India, Japan, the U.S., the U.K. and Australia; Technical Report UMTRI-2014-30 (October); The University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Wang, S.; Jiang, Z.; Noland, R.B.; Mondschein, A.S. Attitudes towards privately-owned and shared autonomous vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 297–306. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Individual predictors of autonomous vehicle public acceptance and intention to use: A systematic review of the literature. J. Open Innov. Technol. Mark. Complex. 2020, 6, 106. [Google Scholar] [CrossRef]
- Nordhoff, S.; van Arem, B.; Happee, R. Conceptual Model to Explain, Predict, and Improve User Acceptance of Driverless Podlike Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2016, 2602, 60–67. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Feys, M.; Rombaut, E.; Vanhaverbeke, L. Experience and acceptance of autonomous shuttles in the brussels capital region. Sustainability 2020, 12, 8403. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Moták, L.; Neuville, E.; Chambres, P.; Marmoiton, F.; Monéger, F.; Coutarel, F.; Izaute, M. Antecedent variables of intentions to use an autonomous shuttle: Moving beyond TAM and TPB? Rev. Eur. Psychol. Appl. 2017, 67, 269–278. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Zoellick, J.C.; Kuhlmey, A.; Schenk, L.; Schindel, D.; Blüher, S. Amused, accepted, and used? Attitudes and emotions towards automated vehicles, their relationships, and predictive value for usage intention. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 68–78. [Google Scholar] [CrossRef] [Green Version]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups. Transp. Res. Part A 2016, 94, 374–385. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Sweet, M.N.; Laidlaw, K. No longer in the driver’s seat: How do affective motivations impact consumer interest in automated vehicles? Transportation 2020, 47, 2601–2634. [Google Scholar] [CrossRef]
- Liu, P.; Xu, Z.; Zhao, X. Road tests of self-driving vehicles: Affective and cognitive pathways in acceptance formation. Transp. Res. Part A Policy Pract. 2019, 124, 354–369. [Google Scholar] [CrossRef]
- Rahman, M.M.; Lesch, M.F.; Horrey, W.J.; Strawderman, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid. Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef]
- Petschnig, M.; Heidenreich, S.; Spieth, P. Innovative alternatives take action—Investigating determinants of alternative fuel vehicle adoption. Transp. Res. Part A Policy Pract. 2014, 61, 68–83. [Google Scholar] [CrossRef]
- Davis, F.D.; Bagozzi, R.P.; Warshaw, P.R. User Acceptance of Computer Technology: A Comparison of Two Theoretical Models. Manag. Sci. 1989, 35, 982–1003. [Google Scholar] [CrossRef] [Green Version]
- Venkatesh, V.; Bala, H. Technology Acceptance Model 3 and a Research Agenda on Interventions. Decis. Sci. 2008, 39, 273–315. [Google Scholar] [CrossRef] [Green Version]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Venkatesh, V.; Thong, J.Y.; Xu, X. Consumer acceptance and use of information technology: Extending the unified theory of acceptance and use of technology. MIS Q. Manag. Inf. Syst. 2012, 36, 157–178. [Google Scholar] [CrossRef] [Green Version]
- Leicht, T.; Chtourou, A.; Ben Youssef, K. Consumer innovativeness and intentioned autonomous car adoption. J. High Technol. Manag. Res. 2018, 29, 1–11. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Dziennus, M.; Graindorge, T.; Ortega, E.; Graindorge, M.; Merat, N. Acceptance of Automated Road Transport Systems (ARTS): An Adaptation of the UTAUT Model. Transp. Res. Procedia 2016, 14, 2217–2226. [Google Scholar] [CrossRef] [Green Version]
- Rogers, E.M. The Diffusion of Innovations, 5th ed.; The Free Press: New York, NY, USA, 2003. [Google Scholar]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research; Addison-Wesley: Reading, MA, USA, 1975. [Google Scholar]
- Yuen, K.F.; Wong, Y.D.; Ma, F.; Wang, X. The determinants of public acceptance of autonomous vehicles: An innovation diffusion perspective. J. Clean. Prod. 2020, 270, 121904. [Google Scholar] [CrossRef]
- Liu, N.; Nikitas, A.; Parkinson, S. Exploring expert perceptions about the cyber security and privacy of Connected and Autonomous Vehicles: A thematic analysis approach. Transp. Res. Part F Traffic Psychol. Behav. 2020, 75, 66–86. [Google Scholar] [CrossRef]
- Planing, P.; Britzelmaier, B. Understanding consumer acceptance of advanced driver-assistance systems—A qualitative study on the German market. Int. J. Sales Retail. Mark. 2012, 1, 32–40. [Google Scholar]
- Meuter, M.L.; Ostrom, A.L.; Bitner, M.J.; Roundtree, R. The influence of technology anxiety on consumer use and experiences with self-service technologies. J. Bus. Res. 2003, 56, 899–906. [Google Scholar] [CrossRef]
- Mcknight, D.H.; Carter, M.; Thatcher, J.B.; Clay, P.F. Trust in a specific technology. ACM Trans. Manag. Inf. Syst. 2011, 2, 1–25. [Google Scholar] [CrossRef]
- Field, A.; Miles, J.; Field, Z. Discovering Statistics Using R; Sage Publications Ltd.: London, UK, 2012. [Google Scholar]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. Not fearless, but self-enhanced: The effects of anxiety on the willingness to use autonomous cars depend on individual levels of self-enhancement. Technol. Forecast. Soc. Chang. 2017, 116, 40–52. [Google Scholar] [CrossRef]
- Nikitas, A.; Njoya, E.T.; Dani, S. Examining the myths of connected and autonomous vehicles: Analysing the pathway to a driverless mobility paradigm. Int. J. Automot. Technol. Manag. 2019, 19, 10–30. [Google Scholar] [CrossRef] [Green Version]
- Hardman, S.; Berliner, R.; Tal, G. Who will be the early adopters of automated vehicles? Insights from a survey of electric vehicle owners in the United States. Transp. Res. Part D Transp. Environ. 2019, 71, 248–264. [Google Scholar] [CrossRef]
- Harb, M.; Xiao, Y.; Circella, G.; Mokhtarian, P.L.; Walker, J.L. Projecting travelers into a world of self-driving vehicles: Estimating travel behavior implications via a naturalistic experiment. Transportation 2018, 45, 1671–1685. [Google Scholar] [CrossRef]
- Ekman, F.; Johansson, M.; Bligård, L.O.; Karlsson, M.A.; Strömberg, H. Exploring automated vehicle driving styles as a source of trust information. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 268–279. [Google Scholar] [CrossRef]
- Skippon, S.M.; Kinnear, N.; Lloyd, L.; Stannard, J. How experience of use influences mass-market drivers’ willingness to consider a battery electric vehicle: A randomised controlled trial. Transp. Res. Part A Policy Pract. 2016, 92, 26–42. [Google Scholar] [CrossRef]
- Sekaran, U.; Bougie, R. Research Methods for Business: A Skill-Building Approach, 7th ed.; Wiley: Chichester, UK, 2016. [Google Scholar]
- Jensen, A.F.; Cherchi, E.; Mabit, S.L. On the stability of preferences and attitudes before and after experiencing an electric vehicle. Transp. Res. Part D Transp. Environ. 2013, 25, 24–32. [Google Scholar] [CrossRef] [Green Version]





| Partcipants, n | 27 |
| Age in years, M (SD) | 35.15 (16.72) |
| Gender (ref: female), n (%) | 14 (51.85%) |
| Degree (ref: high school or lower), n (%) | 2 (7.41%) |
| Driving frequency (ref: daily), n (%) | 11 (40.74%) |
| Experience with ADAS (ref: no experience), n (%) | 10 (37.04%) |
| Experience with automatic gears (ref: no experience), n (%) | 10 (37.04%) |
| Technology savviness (ref: familiar with all applications), n (%) | 16 (59.26%) |
| Technology Trust | Technology Anxiety | |
|---|---|---|
| Attitude | 0.01 | 0.42 |
| AV anxiety | −0.25 | −0.19 |
| Comfort | 0.36 | 0.11 |
| Functional Risk | −0.21 | 0.13 |
| Image | −0.34 | −0.37 |
| Intention to adopt | −0.45 | 0.06 |
| Perceived ease of use | −0.11 | 0.34 |
| Perceived enjoyment | 0.06 | 0.07 |
| Personal norm | −0.22 | −0.30 |
| Physical risk | 0.07 | 0.21 |
| Perceived usefulness | 0.34 | 0.07 |
| Result demonstrability | 0.25 | 0.31 |
| Security risk | −0.09 | −0.05 |
| Subjective norm | 0.15 | −0.01 |
| Trust | −0.38 | 0.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feys, M.; Rombaut, E.; Vanhaverbeke, L. Does a Test Ride Influence Attitude towards Autonomous Vehicles? A Field Experiment with Pretest and Posttest Measurement. Sustainability 2021, 13, 5387. https://doi.org/10.3390/su13105387
Feys M, Rombaut E, Vanhaverbeke L. Does a Test Ride Influence Attitude towards Autonomous Vehicles? A Field Experiment with Pretest and Posttest Measurement. Sustainability. 2021; 13(10):5387. https://doi.org/10.3390/su13105387
Chicago/Turabian StyleFeys, Manon, Evy Rombaut, and Lieselot Vanhaverbeke. 2021. "Does a Test Ride Influence Attitude towards Autonomous Vehicles? A Field Experiment with Pretest and Posttest Measurement" Sustainability 13, no. 10: 5387. https://doi.org/10.3390/su13105387
APA StyleFeys, M., Rombaut, E., & Vanhaverbeke, L. (2021). Does a Test Ride Influence Attitude towards Autonomous Vehicles? A Field Experiment with Pretest and Posttest Measurement. Sustainability, 13(10), 5387. https://doi.org/10.3390/su13105387