
A Unified Control Strategy of Distributed Generation for Grid-Connected and Islanded Operation Conditions Using an Artificial Neural Network



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Description System
2.1. General Elements in the Main Power Network
2.2. Proposed Control Method
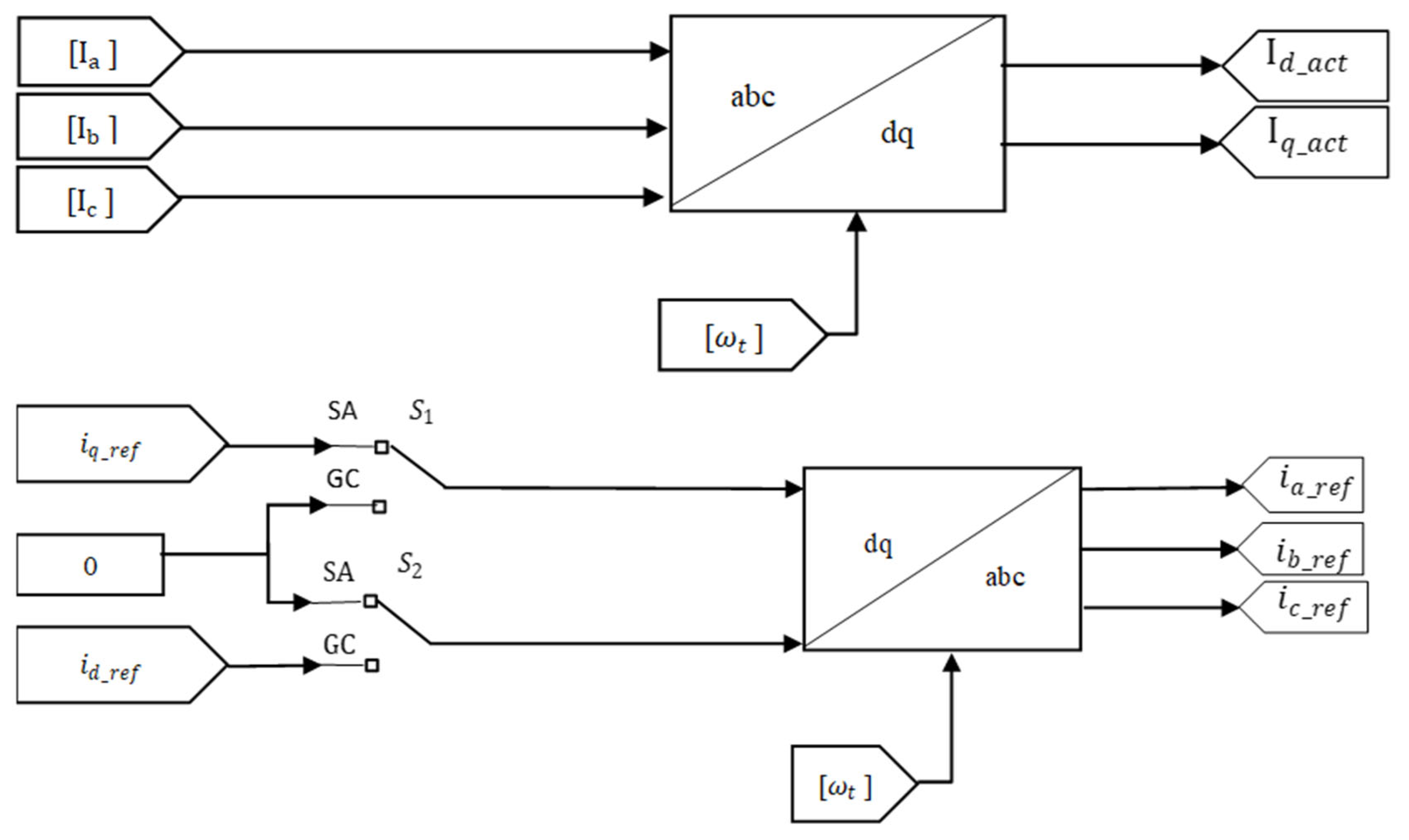
2.2.1. The Park Transform Calculations
2.2.2. The Phase Angle Calculation
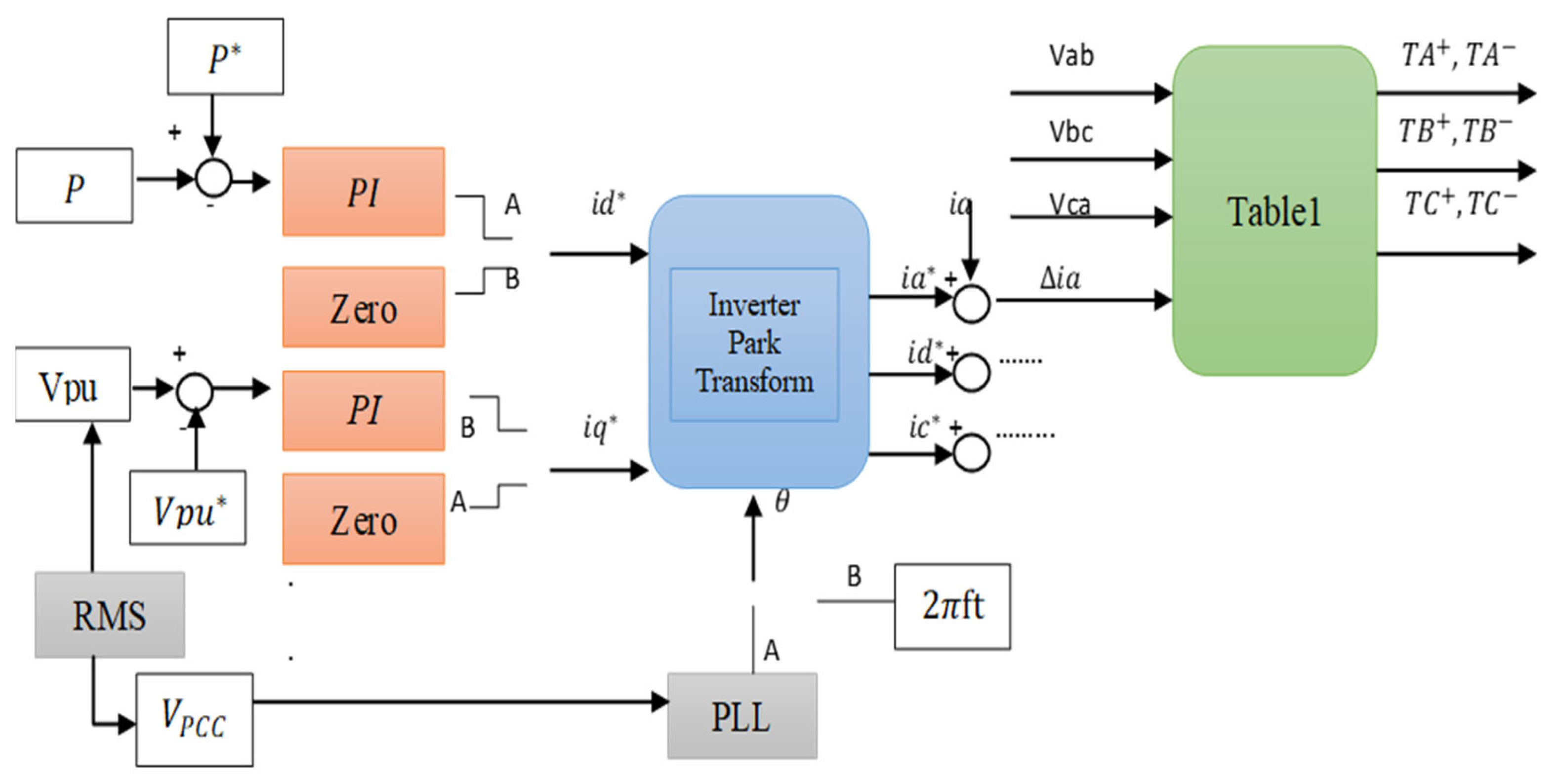
3. Control System and Algorithm
3.1. Basic Proportional Integration (PI) Controller
3.1.1. The Reference Calculations
At Grid-Tied Conditions
At Standalone Conditions
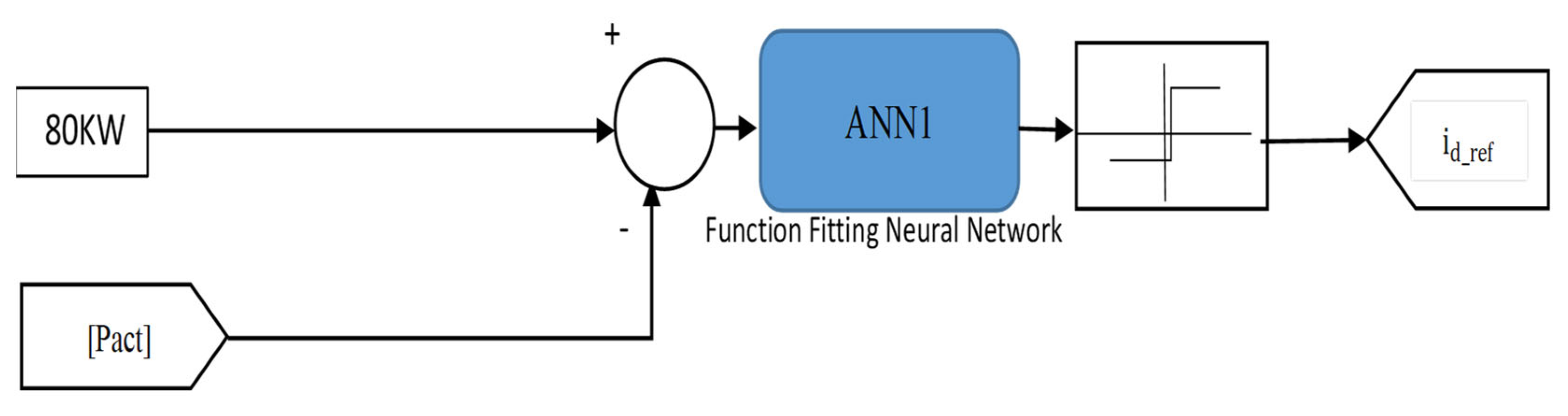
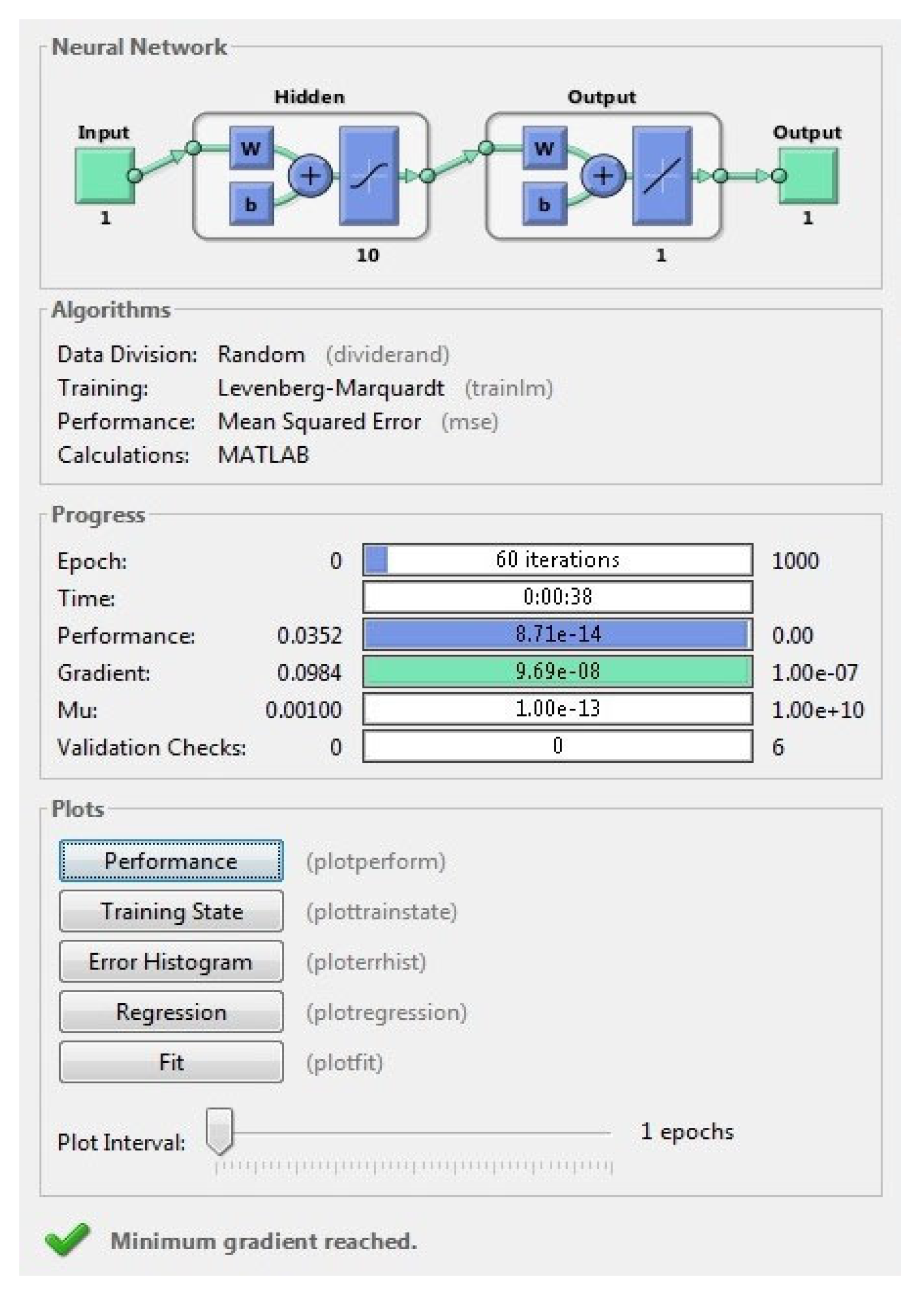
3.2. Adaptive Proportional Integration Using an Artificial Neural Network (ANN)
- The input layer: this enters past variables’ values into the next layer.
- The hidden layer: this is a main issue of a neural network. It has complex functions which generate predictors. A group of nodes in the hidden layer mean that the neurons show the math functions which edit the input variables.
- The output layer: this is the model’s prediction, in which the predictions made in the hidden layer are composed to obtain the final layer.
3.2.1. The Reference Calculations
At Grid-Tied Conditions
At Standalone Conditions
4. Simulation Results
4.1. At Grid-Connected Mode
4.2. At Standalone Mode
4.3. At Transferring from One Condition to Another
4.4. The Simulation Results Using Basic PI Controllers
4.4.1. At Transferring Conditions from Grid-Connected to Standalone
4.4.2. At Transferring Conditions from Standalone to Grid-Connected
4.5. The Simulation Results Using an Adaptive PI Controller Artificial Neural Network (ANN)
4.5.1. At Transferring Conditions from Grid-Connected to Standalone
4.5.2. At Transferring Conditions from Standalone to Grid-Connected
5. Discussion
5.1. General Comments about the Achieved Results
5.2. Variations of the Control Parameters
5.3. Implementation Applied to Complex Problems
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mozina, C.J. Impact of Green Power Distributed Generation. IEEE Ind. Appl. Mag. 2010, 16, 55–62. [Google Scholar] [CrossRef]
- Massucco, S.; Pitto, A.; Silvestro, F. A Gas Turbine Model for Studies on Distributed Generation Penetration into Distribution Networks. IEEE Trans. Power Syst. 2010, 26, 992–999. [Google Scholar] [CrossRef]
- Lasseter, R.H. Microgrids and Distributed Generation. J. Energy Eng. 2007, 133, 144–149. [Google Scholar] [CrossRef]
- Ekonomou, L.; Fotis, G.P.; Vita, V.; Mladenov, V. Distributed generation islanding effect on distribution networks and end user loads using the master-slave islanding method. J. Power Energy Eng. 2016, 4, 1–24. [Google Scholar] [CrossRef] [Green Version]
- IEEE. Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE Stand. 2003, 1547, 2003. [Google Scholar]
- Guerrero, J.M.; Hang, L.; Uceda, J. Control of Distributed Uninterruptible Power Supply Systems. IEEE Trans. Ind. Electron. 2008, 55, 2845–2859. [Google Scholar] [CrossRef] [Green Version]
- Ajaja, A. Reinventing electric distribution. IEEE Potentials 2010, 29, 29–31. [Google Scholar] [CrossRef]
- Stewart, E.; Tumilty, R.; Fletcher, J.; Lutz, A.; Ault, G.; McDonald, J. Analysis of a Distributed Grid-Connected Fuel Cell During Fault Conditions. IEEE Trans. Power Syst. 2009, 25, 497–505. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Luna, A.; Rodríguez, P.; Teodorescu, R. Adaptive Droop Control Applied to Voltage-Source Inverters Operating in Grid- Connected and Islanded Modes. Ind. Electron. IEEE Trans. 2009, 56, 4088–4096. [Google Scholar] [CrossRef]
- Wu, C.-S.; Liao, H.; Wang, Y.-B.; Peng, Y.-C.; Xu, H.-H. Design of intelligent utility-interactive inverter with AI detection. In Proceedings of the Electric Utility Deregulation and Restructuring and Power Technologies, DRPT 2008, Nanjing, China, 6–9 April 2008; pp. 2012–2017. [Google Scholar]
- Franceschini, G.; Lorenzani, E.; Tassoni, C.; Bellini, A. Synchronous Reference Frame Grid Current Control for Single-phase Photovoltaic Converters. In Proceedings of the Industry Applications Society Annual Meeting, 2008, IAS ‘08, Edmonton, AB, Canada, 5–9 October 2008; IEEE: New York, NY, USA, 2008; pp. 1–7. [Google Scholar]
- Selvaraj, J.; Rahim, N.A. Multilevel Inverter for Grid-Connected PV System Employing Digital PI Controller. IEEE Trans. Ind. Electron. 2008, 56, 149–158. [Google Scholar] [CrossRef]
- Green, T.C.; Prodanovic, M. Control of inverter-based microgrids. Electr. Power Syst. Res. 2007, 77, 1204–1213. [Google Scholar] [CrossRef] [Green Version]
- Haque, M.E.; Negnevitsky, M.; Muttaqi, K. A Novel Control Strategy for a Variable-Speed Wind Turbine with a Permanent-Magnet Synchronous Generator. IEEE Trans. Ind. Appl. 2010, 46, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Vasquez, J.C.; Guerrero, J.M.; Miret, J.; Castilla, M.; De Vicuna, L.G. Hierarchical Control of Intelligent Microgrids. Ind. Electron. Mag. IEEE 2010, 4, 23–29. [Google Scholar] [CrossRef]
- Li, Y. Development of Power Conditioners and Controllers for Microgrids. Doctoral Thesis, School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore, 2005. [Google Scholar]
- Prata, R. Impact of distributed generation connection with distribution grids–Two case-studies. In Proceedings of the 2006 Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; IEEE: New York, NY, USA, 2006; pp. 8, 112. [Google Scholar]
- Pogaku, N. Analysis, Control and Testing of Inverter-Based Distributed Generation in Standalone and Grid—Connected Applications. Ph.D. Thesis, University of London, London, UK, 2006. [Google Scholar]
- Zhou, Y.; Ferreira, J.; Bauer, P. Grid-connected and islanded operation of a hybrid power system. In Proceedings of the 2007 Power Engineering Society Conference and Exposition in Africa, Power Africa ‘07, Johannesburg, South Africa, 16–20 July 2007; IEEE: New York, NY, USA, 2007; pp. 1–6. [Google Scholar]
- V.T. Consortium on Energy Restructuring. Distributed Generation Education Modules. 2008. Available online: http://www.history.vt.edu/Hirsh/CER/CER-Base.htm (accessed on 11 May 2021).
- Chowdhury, S.P.; Chowdhury, S.; Crossley, P.A.; Ten, C.F. UK scenario of islanded operation of active distribution networks—A survey. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; IEEE: New York, NY, USA, 2008; pp. 1–6. [Google Scholar]
- Bayod-Rújula, A.A. Future development of the electricity systems with distributed generation. Energy 2009, 34, 377–383. [Google Scholar] [CrossRef]
- Salam, A.A.; Hannan, M.A.; Mohamed, A.; Shareef, H. A 50kW PEM fuel cell inverter-based distributed generation system for grid connected and islanding operation. In Proceedings of the TENCON 2009—2009 IEEE Region 10 Conference, Singapore, 23–26 January 2009; p. 15. [Google Scholar]
- Ciobotaru, M.; Agelidis, V.G.; Teodorescu, R.; Blaabjerg, F. Accurate and less-disturbing active anti-islanding method based on PLL for grid- connected PV Inverters. In Proceedings of the 2008 Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 4569–4576. [Google Scholar]
- Gao, F.; Iravani, M.R. A Control Strategy for a Distributed Generation Unit in Grid-Connected and Autonomous Modes of Operation. IEEE Trans. Power Deliv. 2008, 23, 850–859. [Google Scholar]
- Arnedo, L.; Dwari, S.; Blasko, V.; Park, S. 80 kW hybrid solar inverter for standalone and grid connected applications. In Proceedings of the 27th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 270–276. [Google Scholar]
- Mohamed, Y.A.-R.I.; Zeineldin, H.H.; Salama, M.M.A.; Seethapathy, R. Seamless Formation and Robust Control of Distributed Generation Microgrids via Direct Voltage Control and Optimized Dynamic Power Sharing. IEEE Trans. Power Electron. 2012, 27, 1283–1294. [Google Scholar] [CrossRef]
- Hu, S.-H.; Kuo, C.-Y.; Lee, T.-L.; Guerrero, J.M. Droop-controlled inverters with seamless transition between islanding and grid-connected operations. In Proceedings of the 3rd IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 2196–2201. [Google Scholar]
- Zeineldin, H.; El-Saadany, E.; Salama, M. Intentional islanding of distributed generation. In Proceedings of the IEEE Power Engineering Society General Meeting IEEE, San Francisco, CA, USA, 16 June 2005; pp. 1496–1502. [Google Scholar]
- Jung, S.; Bae, Y.; Choi, S.; Kim, H. A Low-Cost Utility Interactive Inverter for Residential Fuel Cell Generation. IEEE Trans. Power Electron. 2007, 22, 2293–2298. [Google Scholar] [CrossRef]
- Majumder, R.; Ghosh, A.; Ledwich, G.; Zare, F. Control of parallel converters for load sharing with seamless transfer between grid connected and islanded modes. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–7. [Google Scholar]
- Tao, H.H.; Duarte, J.L.; Hendrix, M.A.M. Line-Interactive UPS Using a Fuel Cell as the Primary Source. IEEE Trans. Ind. Electron. 2008, 55, 3012–3021. [Google Scholar]
- Gaonkar, D.N.; Pillai, G.N.; Patel, R.N. Seamless Transfer of Microturbine Generation System Operation Between Grid-connected and Islanding Modes. Electr. Power Compon. Syst. 2009, 37, 174–188. [Google Scholar] [CrossRef]
- Reza, N.; Gevorg, G.; Mehrdad, A.; Mishel, M. Grid-tied and standalone operation of distributed generation modules aggregated by cascaded boost converters. J. Power Electron. 2010, 10, 97–105. [Google Scholar]
- Azevedo, G.M.S.; Bradaschia, F.; Cavalcanti, M.C.; Neves, F.A.S.; Rocabert, J.; Rodriguez, P. Safe transient operation of microgrids based on master-slave configuration. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 2191–2195. [Google Scholar]
- Balaguer-Alvarez, I.; Lei, Q.; Yang, S.; Supatti, U.; Peng, F.Z. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation. IEEE Trans. Ind. Electron. 2011, 58, 147–157. [Google Scholar] [CrossRef]
- Lee, S.-M.; Sung, K.-N.; Lee, T.-K.; Lee, W.-C. UPS/APF power conversion equipment with a seamless mode transfer. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2769–2776. [Google Scholar]
- Ranjbar, M.; Ebrahimirad, H.; Mohaghegh, S.; Ghaleh, A. Seamless transfer of three-phase grid-interactive microturbine inverter between grid connected and stand-alone modes. In Proceedings of the 19th Iranian Conference on Electrical Engineering, Tehran, Iran, 17–19 May 2011; pp. 1–6. [Google Scholar]
- Hwang, T.-S.; Park, S.-Y. A seamless control strategy of distributed generation inverter for critical load safety under strict grid disturbance. In Proceedings of the 27th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 254–261. [Google Scholar]
- Pai, F.-S. An Improved Utility Interface for Microturbine Generation System with Stand-Alone Operation Capabilities. IEEE Trans. Ind. Electron. 2006, 53, 1529–1537. [Google Scholar] [CrossRef]
- Pai, F.-S.; Huang, S.-J. Design and Operation of Power Converter for Microturbine Powered Distributed Generator with Capacity Expansion Capability. IEEE Trans. Energy Convers. 2008, 23, 110–118. [Google Scholar]
- Dong, D.; Thacker, T.; Burgos, R.; Boroyevich, D.; Wang, F.; Giewont, B. Control design and experimental verification of a multi-function single phase bidirectional PWM converter for renewable energy systems. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Dong, D.; Thacker, T.; Cvetkovic, I.; Burgos, R.; Boroyevich, D.; Wang, F.F.; Skutt, G. Modes of operation and system level control of single-phase bidirectional PWM converter for microgrid systems. IEEE Trans. Smart Grid 2012, 3, 93–104. [Google Scholar] [CrossRef]
- Shen, G.; Xu, D.; Xi, D. Novel seamless transfer strategies for fuel cell inverters from grid-tied mode to off-grid mode. In Proceedings of the 20th Annual IEEE Conference on Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–10 March 2005; pp. 109–113. [Google Scholar]
- Shen, G.; Xu, D.; Yuan, X. A novel seamless transfer control strategy based on voltage amplitude regulation for utility-interconnected fuel cell inverters with an LCL-filter. In Proceedings of the 37th IEEE IEEE Annual Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Shen, G.; Xu, D.; Yuan, X. Instantaneous voltage regulated seamless transfer control strategy for utility-interconnected fuel cell inverters with an LCL-filter. In Proceedings of the 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; pp. 1–5. [Google Scholar]
- Huang, S.; Kong, L.; Xu, H. Control algorithm research on seamless transfer for distributed resource with a LCL filter. In Proceedings of the 3rd International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; pp. 2810–2814. [Google Scholar]
- Lei, Q.; Yang, S.; Peng, F.Z. Multi-loop control algorithms for seamless transition of grid-connected inverter. In Proceedings of the 25th Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 844–848. [Google Scholar]
- Jung, J.H.; Nho, E.-C.; Kim, I.-D.; Kim, H.-G.; Chun, T.-W.; Choi, N.-S. Seamless control mode transfer of a PCS for islanding mode operation. In Proceedings of the 8th International Power Electronics, Jeju, Korea, 30 May–3 June 2011; pp. 2658–2662. [Google Scholar]
- Massoud, A.; Ahmed, K.H.; Finney, S.; Williams, B. Harmonic distortion-based island detection technique for inverter-based distributed generation. IET Renew. Power Gener. 2009, 3, 493. [Google Scholar] [CrossRef]
- Thacker, T.; Burgos, R.; Wang, F.; Boroyevich, D. Single-phase islanding detection based on phase-locked loop stability. In Proceedings of the 1st IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 3371–3377. [Google Scholar] [CrossRef]
- Kim, S.-K.; Jeon, J.-H.; Ahn, J.-B.; Lee, B.; Kwon, S.-H. Frequency shift acceleration control for anti-islanding of a distributed-generation inverter. IEEE Trans. Ind. Electron. 2010, 57, 494–504. [Google Scholar] [CrossRef]
- Yafaoui, A.; Wu, B.; Kouro, S. Improved active frequency drift antiislanding detection method for grid connected photovoltaic systems. IEEE Trans. Power Electron. 2012, 27, 2367–2375. [Google Scholar] [CrossRef]
- Karimi, M.; Mokhlis, H.; Naidu, K.; Uddin, S.; Bakar, A. Photovoltaic penetration issues and impacts in distribution network—A review. Renew. Sustain. Energy Rev. 2016, 53, 594–605. [Google Scholar] [CrossRef]
- Cirrincione, M.; Pucci, M.; Vitale, G. A single-phase DG generation unit with shunt active power filter capability by adaptive neural filtering. IEEE Trans. Ind. Electron. 2008, 55, 2093–2110. [Google Scholar] [CrossRef]
- He, Y.; Li, W.; Munir, M.S. A flexible harmonic control approach through voltage-controlled DG-grid interfacing converters. IEEE Trans. Ind. Electron. 2012, 59, 444–455. [Google Scholar] [CrossRef]
- Lei, Q.; Peng, F.Z.; Yang, S. Multiloop control method for high-performance microgrid inverter through load voltage and current decoupling with only output voltage feedback. IEEE Trans. Power Electron. 2010, 26, 953–960. [Google Scholar] [CrossRef]
- Hasanzadeh, A.; Onar, O.C.; Mokhtari, H.; Khaligh, A. A Proportional-Resonant Controller-Based Wireless Control Strategy with a Reduced Number of Sensors for Parallel-Operated UPSs. IEEE Trans. Power Deliv. 2010, 25, 468–478. [Google Scholar] [CrossRef]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary control for voltage quality enhancement in microgrids. IEEE Trans. Smart Grid 2012, 3, 1893–1902. [Google Scholar] [CrossRef] [Green Version]
- Valencia, P.; Ramos-Paja, C. Sliding-Mode Controller for Maximum Power Point Tracking in Grid-Connected Photovoltaic Systems. Energies 2015, 8, 2318. [Google Scholar] [CrossRef] [Green Version]
- Kreishan, M.Z.; Fotis, G.P.; Vita, V.; Ekonomou, L. Distributed generation islanding effect on distribution networks and end user loads using the load sharing islanding method. Energies 2016, 9, 956. [Google Scholar] [CrossRef] [Green Version]
- Bertani, A.; Bossi, C.; Fornari, F.; Massucco, S.; Spelta, S.; Tivegna, F. A microturbine generation system for grid connected and islanding operation. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004; Volume 1, pp. 360–365. [Google Scholar]
- Gaonkar, D.N.; Patel, R.N.; Pillai, G.N. Dynamic Model of Microturbine Generation System for Grid Connected/Islanding Operation. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 305–310. [Google Scholar]
- Farret, F.A.; Simoes, M.G. Integration of Alternative Sources of Energy; IEEE Press: Piscataway, NJ, USA, 2006. [Google Scholar]
- Nikkhajoei, H.; Iravani, M. A Matrix Converter Based Micro-Turbine Distributed Generation System. IEEE Trans. Power Deliv. 2005, 20, 2182–2192. [Google Scholar] [CrossRef]
- Marei, M.I. A Unified Control Strategy Based on Phase Angle Estimation for Matrix Converter Interface System. IEEE Syst. J. 2011, 6, 278–286. [Google Scholar] [CrossRef]
- Alotaibi, N.M.; Alwakeel, S.S. A neural network-based handover management strategy for heterogeneous networks. In Proceedings of the 14th IEEE International Conference on Machine Learning and Applications, Miami, FL, USA, 9–11 December 2015; pp. 1210–1214. [Google Scholar]
- Ahuja, K.; Singh, B.; Khanna, R. Particle swarm optimization-based network selection in heterogeneous wireless environment. Optik 2014, 125, 214–219. [Google Scholar] [CrossRef]
- Chai, R.; Cheng, J.; Pu, X.; Chen, Q. Neural Network Based Vertical Handoff Performance Enhancement in Heterogeneous Wireless Networks. In Proceedings of the 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011; pp. 1–4. [Google Scholar]














































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Sharawy, K.M.; Diab, H.Y.; Abdelsalam, M.O.; Marei, M.I. A Unified Control Strategy of Distributed Generation for Grid-Connected and Islanded Operation Conditions Using an Artificial Neural Network. Sustainability 2021, 13, 6388. https://doi.org/10.3390/su13116388
El-Sharawy KM, Diab HY, Abdelsalam MO, Marei MI. A Unified Control Strategy of Distributed Generation for Grid-Connected and Islanded Operation Conditions Using an Artificial Neural Network. Sustainability. 2021; 13(11):6388. https://doi.org/10.3390/su13116388
Chicago/Turabian StyleEl-Sharawy, Karim M., Hatem Y. Diab, Mahmoud O. Abdelsalam, and Mostafa I. Marei. 2021. "A Unified Control Strategy of Distributed Generation for Grid-Connected and Islanded Operation Conditions Using an Artificial Neural Network" Sustainability 13, no. 11: 6388. https://doi.org/10.3390/su13116388
APA StyleEl-Sharawy, K. M., Diab, H. Y., Abdelsalam, M. O., & Marei, M. I. (2021). A Unified Control Strategy of Distributed Generation for Grid-Connected and Islanded Operation Conditions Using an Artificial Neural Network. Sustainability, 13(11), 6388. https://doi.org/10.3390/su13116388