
Fault Detection and RUL Estimation for Railway HVAC Systems Using a Hybrid Model-Based Approach



Abstract
:1. Introduction
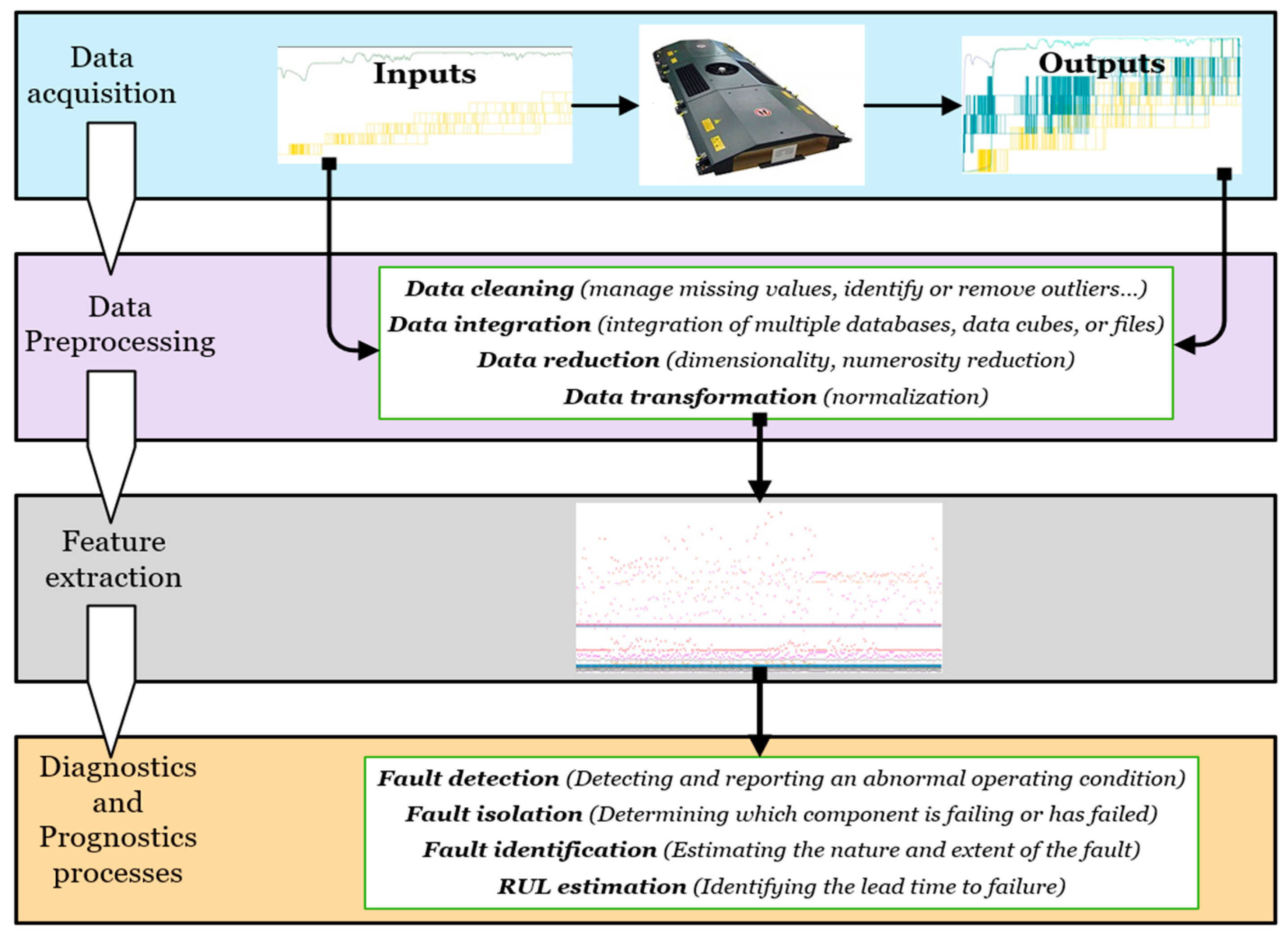
1.1. Data Analysis
1.2. Technical Approaches
1.2.1. Model-Based Approaches
1.2.2. Data-Driven Approaches
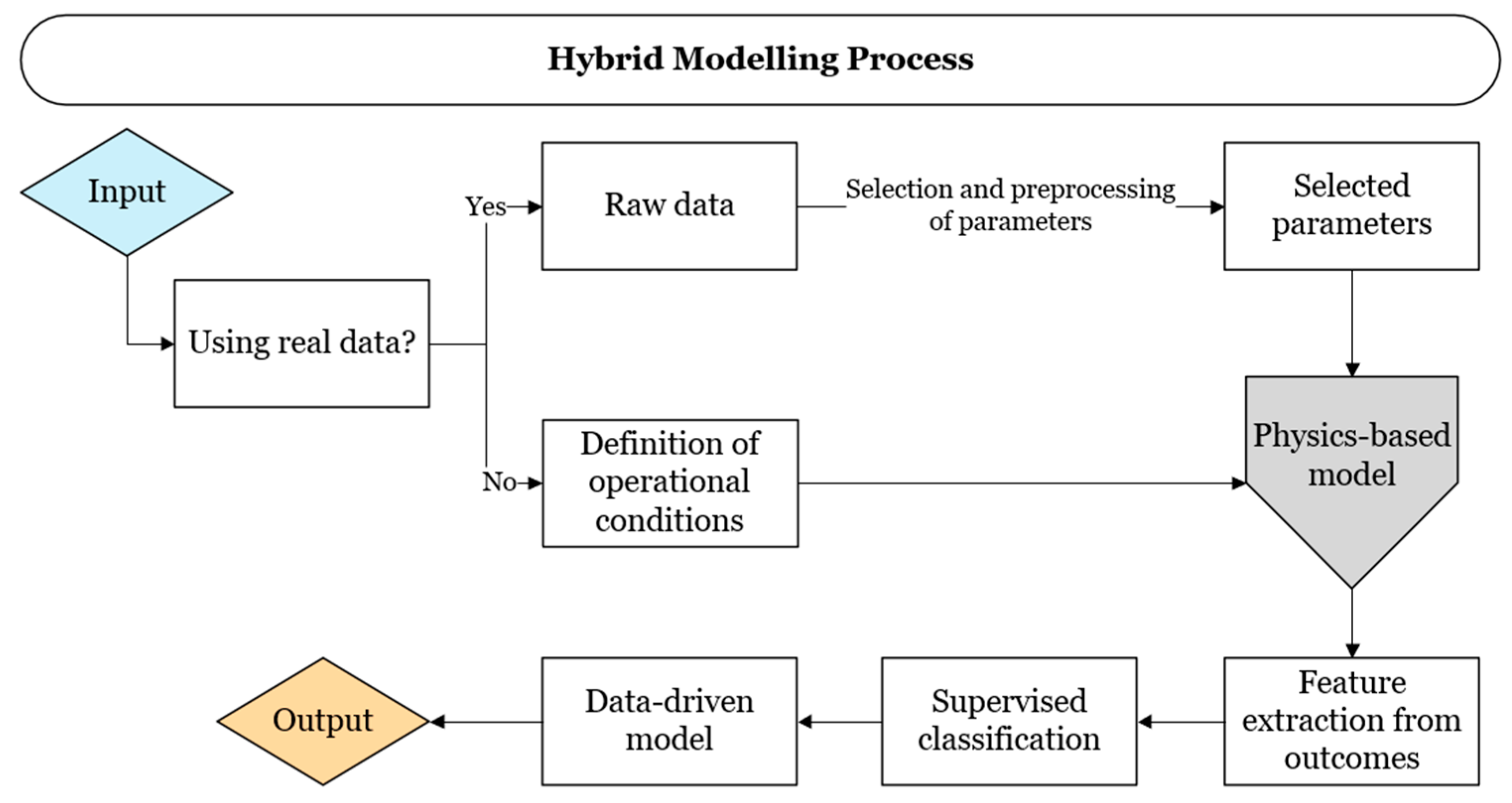
1.2.3. Hybrid Model-Based Approaches
- H1—Experience-based model + data-driven model.
- H2—Experience-based model + physics-based model
- H3—Data-driven model + data-driven model
- H4—Data-driven model + physics-based model
- H5—Experience-based model + data-driven model + physics-based model
2. Proposed Hybrid Modelling Methodology
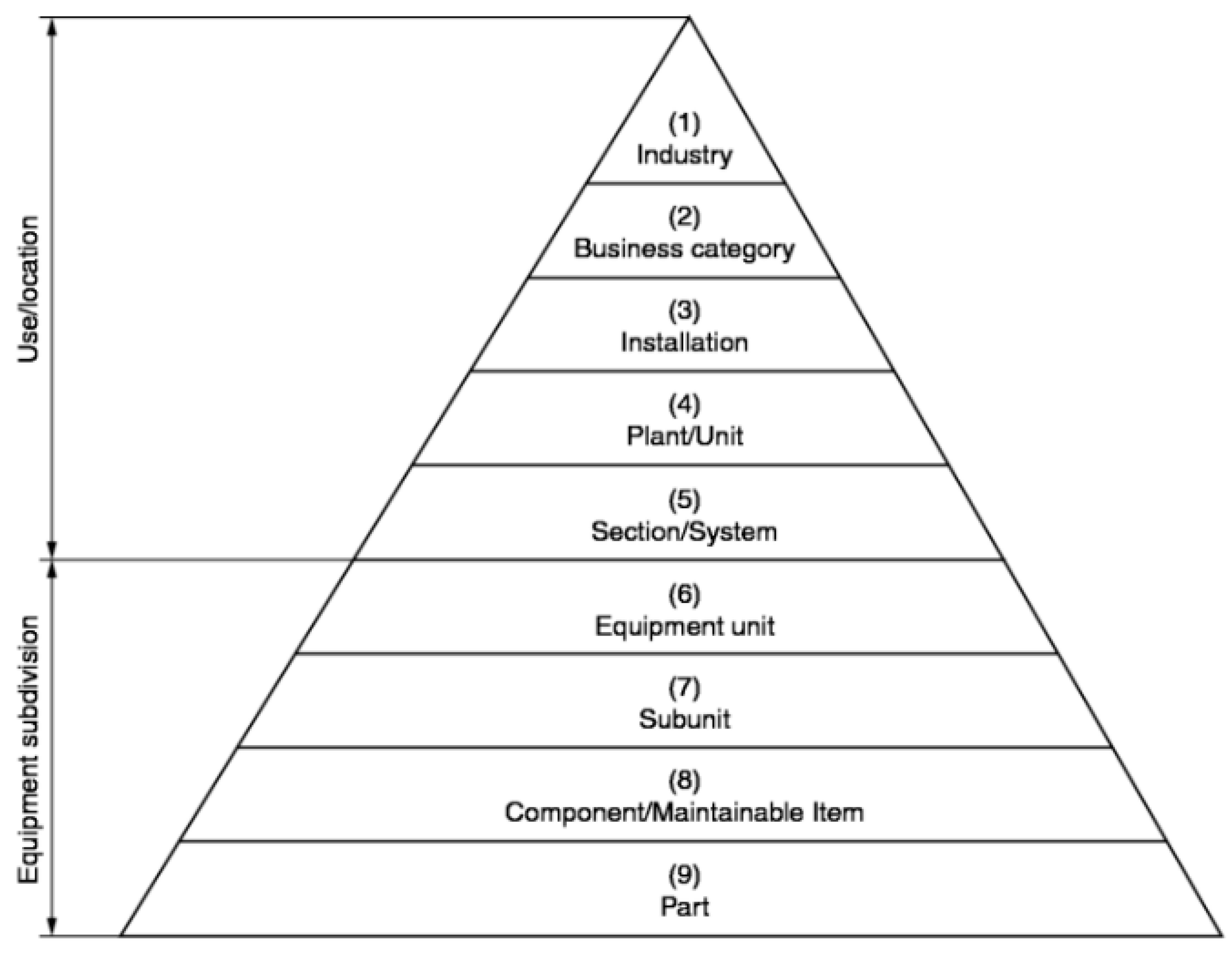
2.1. HVAC System as a System of Systems
2.2. Physics-Based Model of the HVAC System
2.2.1. Fault Modelling
2.2.2. Synthetic Data Generation
2.2.3. Feature Extraction
2.3. Data-Driven Model
3. Experimental Set-Up
- Damage is only produced in four components with specific damage; i.e., no other FMs are considered. Consequently, the diagnosis process is focused on finding the FM which has appeared.
- There are defined deviations in two sensors. The chance of a fault in other sensors is not considered.
- The company does not have run-to-failure data for the HVAC system installed in the passenger train carriage, and there is no possibility to do run-to-failure tests on the assessed equipment.
- The few number of sensors embedded in the real system makes it difficult to develop the identification process.
- There are only historical data for faults in the CO2 sensor and deviations in the low-pressure side of the refrigerant circuit. The lack of data in the other situations presented in this paper is overcome by using synthetic data. As it is detailed in Table 2, the dataset generated by the physics-based model generates 791 simulations. From those, 109 simulations contain historical data with faults.
- The resulting combination of real and synthetic data is split into training, validation and test sets in order to properly analyze the accuracy of the supervised learner and its generalization capabilities. More specifically, 629 (79% of the total) simulations are used as training and validation sets (60% for fitting the model and 20% for free parameter tuning, respectively), and the other 162 as testing set (21% of the total, for model evaluation on unseen data).
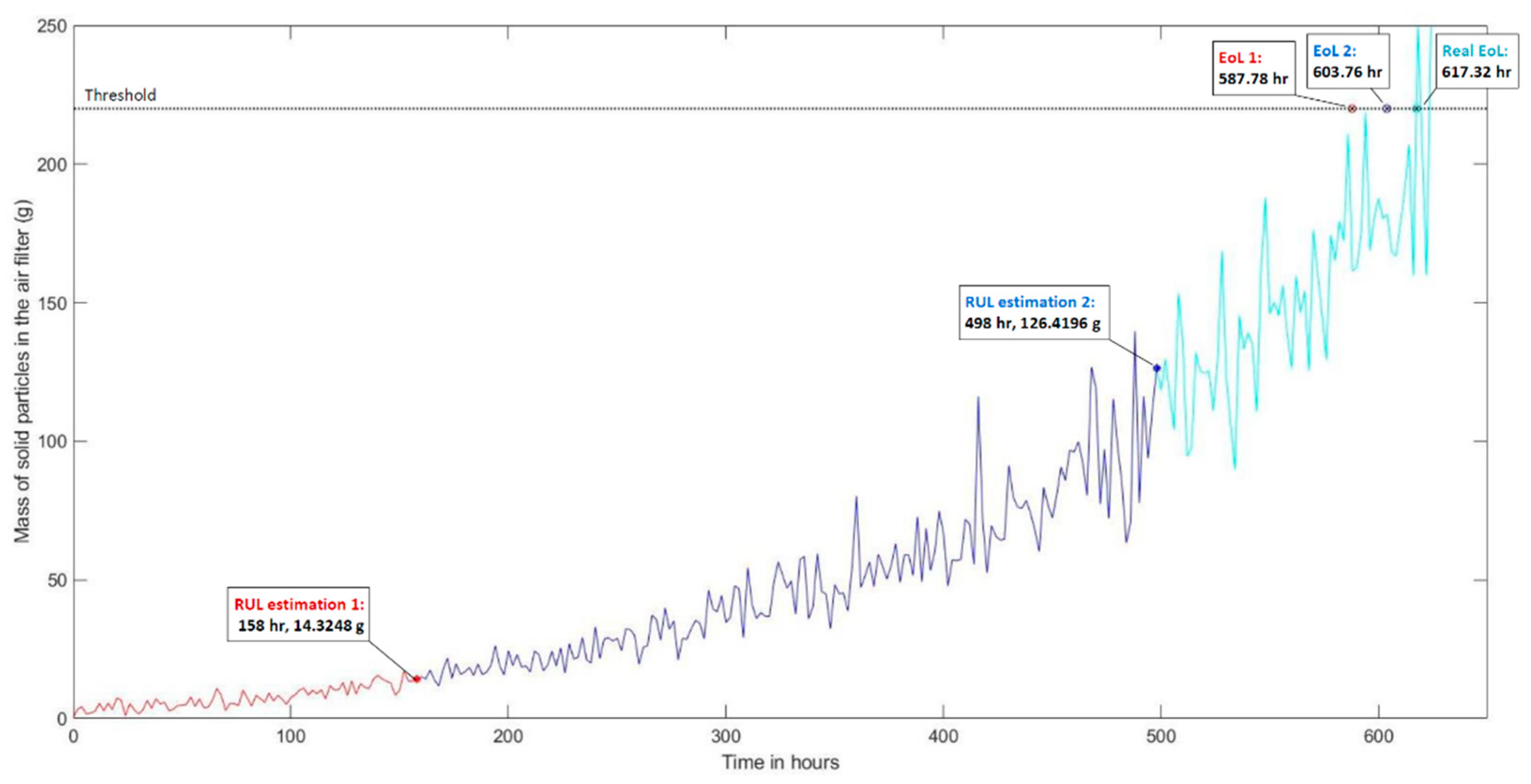
- The degradation of the air filter in the time-frame is known. Thus, the prognostics process is limited to quantifying the RUL of the air filter.
- Atmospheric temperature. The temperature is introduced in the model as timeseries. The most representative timeseries used in this development contain operational data from 65 to 170 min. Before introducing variations in datasets of temperature, the temperature is analyzed considering the month when the dataset was collected to identify the maximum and minimum values of temperatures reached in that month. Next, a set of parameters is defined to apply noise to atmospheric temperature. This provides the signals with different values into a controlled range of temperatures.
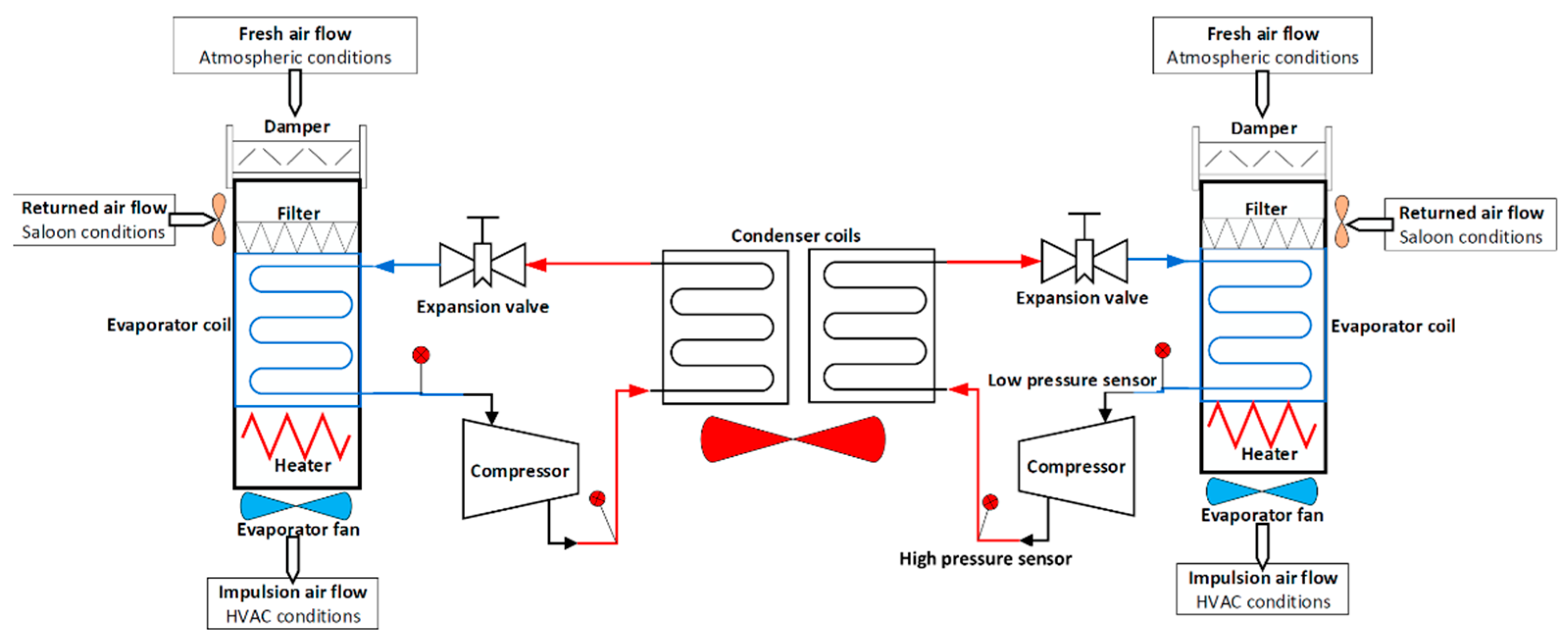
- Air flow. This parameter identifies the fresh air flow that goes inside the cabin through the damper (see Figure 5). The HVAC introduces fresh air into the cabin depending on the needs. The fresh air flow is managed by the damper position; one position indicates that the damper is closed, and the others take the following values: 410 m3/h (+/−25%), 840 m3/h (+/−20%) and 1250 m3/h (+/−10%). The percentage behind the nominal flow represent variations in the air flow, these variations were supplied by the manufacturer of the system. Therefore, the data is generated, varying the air flow in the indicated range of flows that are directly related to the damper position.
- Number of passengers. The number of passengers can take the values between 0 and 125, which is the maximum passenger allowed in the cabin.
- Parameters defined for components degradation. There is one parameter defined for each FM. The sensors’ faults are modelled by introducing a drift to the sensors’ response; the deviation is controlled by a parameter which indicates no sensor fault and faults at different stages of degradation. The faults in components are defined by relating the response of the system with the parameters which indicate a fault. This relation is mainly defined by giving an understanding of the physics of the physical world. Furthermore, the degradation of the air filter is also defined using expert knowledge and previous experimental results.
4. Experimental Results and Discussion
Remaining Useful Life Estimation
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Sáez-Martínez, F.J.; Lefebvre, G.; Hernández, J.J.; Clark, J.H. Drivers of sustainable cleaner production and sustainable energy options. J. Clean. Prod. 2016, 138, 1–7. [Google Scholar] [CrossRef]
- Franciosi, C.; Voisin, A.; Miranda, S.; Riemma, S.; Iung, B. Measuring maintenance impacts on sustainability of manufacturing industries: From a systematic literature review to a framework proposal. J. Clean. Prod. 2020, 260, 121065. [Google Scholar] [CrossRef]
- Moldavska, A.; Welo, T. The concept of sustainable manufacturing and its definitions: A content-analysis based literature review. J. Clean. Prod. 2017, 166, 744–755. [Google Scholar] [CrossRef]
- Wang, N.; Ma, M.; Liu, Y. The whole lifecycle management efficiency of the public sector in PPP infrastructure projects. Sustainability 2020, 12, 3049. [Google Scholar] [CrossRef] [Green Version]
- Eslami, Y.; Dassisti, M.; Lezoche, M.; Panetto, H. A survey on sustainability in manufacturing organisations: Dimensions and future insights. Int. J. Prod. Res. 2019, 57, 5194–5214. [Google Scholar] [CrossRef] [Green Version]
- Ai, Q.; Yuan, Y.; Mahadevan, S.; Jiang, X. Maintenance strategies optimisation of metro tunnels in soft soil. Struct. Infrastruct. Eng. 2017, 13, 1093–1103. [Google Scholar] [CrossRef]
- Jasiulewicz-Kaczmarek, M. The role and contribution of maintenance in sustainable manufacturing. IFAC Proc. Vol. 2013, 46, 1146–1151, 7th IFAC Conference on Manufacturing Modelling, Management, and Control. [Google Scholar] [CrossRef]
- Mishra, M. Prognostics and Health Management of Engineering Systems for Operation and Maintenance Optimisation. Ph.D. Thesis, Luleå University of Technology, Operation, Maintenance and Acoustics, Luleå, Sweden, 2018. [Google Scholar]
- Mishra, M.; Leturiondo-Zubizarreta, U.; Salgado-Picón, Ó.; Galar-Pascual, D. Hybrid modelling for failure diagnosis and prognosis in the transport sector. Acquired data and synthetic data. DYNA Ing. Ind. 2014, 90, 139–145. [Google Scholar] [CrossRef] [Green Version]
- Galar, D.; Kumar, U. (Eds.) Chapter 5—Diagnosis. In eMaintenance; Academic Press: Cambridge, MA, USA, 2017; pp. 235–310. [Google Scholar] [CrossRef]
- Yun, W.S.; Hong, W.H.; Seo, H. A data-driven fault detection and diagnosis scheme for air handling units in building HVAC systems considering undefined states. J. Build. Eng. 2021, 35, 102111. [Google Scholar] [CrossRef]
- Montazeri, A.; Kargar, S.M. Fault detection and diagnosis in air handling using data-driven methods. J. Build. Eng. 2020, 31, 101388. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Y.; Zhang, C.; Luo, J.; Zhang, X. A knowledge-guided and data-driven method for building HVAC systems fault diagnosis. Build. Environ. 2021, 198, 107850. [Google Scholar] [CrossRef]
- Li, B.; Cheng, F.; Cai, H.; Zhang, X.; Cai, W. A semi-supervised approach to fault detection and diagnosis for building HVAC systems based on the modified generative adversarial network. Energy Build. 2021, 246, 111044. [Google Scholar] [CrossRef]
- Chen, C.; Xu, T.; Wang, G.; Li, B. Railway turnout system RUL prediction based on feature fusion and genetic programming. Measurement 2020, 151, 107162. [Google Scholar] [CrossRef]
- Sun, B.; Li, Y.; Wang, Z.; Ren, Y.; Feng, Q.; Yang, D. An improved inverse Gaussian process with random effects and measurement errors for RUL prediction of hydraulic piston pump. Measurement 2020, 2020, 108604. [Google Scholar] [CrossRef]
- Ge, M.F.; Liu, Y.; Jiang, X.; Liu, J. A review on state of health estimations and remaining useful life prognostics of lithium-ion batteries. Measurement 2021, 174, 109057. [Google Scholar] [CrossRef]
- Yan, Y.; Luh, P.B.; Pattipati, K.R. Fault prognosis of key components in HVAC air-handling systems at component and system levels. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2145–2153. [Google Scholar] [CrossRef]
- Liao, L.; Köttig, F. A hybrid framework combining data-driven and model-based methods for system remaining useful life prediction. Appl. Soft Comput. 2016, 44, 191–199. [Google Scholar] [CrossRef]
- An, D.; Kim, N.H.; Choi, J.H. Practical options for selecting data-driven or physics-based prognostics algorithms with reviews. Reliab. Eng. Syst. Saf. 2015, 133, 223–236. [Google Scholar] [CrossRef]
- Bendapudi, S.; Braun, J.; Groll, E. A dynamic model of a vapor compression liquid chiller. In International Refrigeration and Air Conditioning Conference; Purdue University: West Lafayette, IN, USA, 2002. [Google Scholar]
- Poon, J.; Jain, P.; Konstantakopoulos, I.C.; Spanos, C.; Panda, S.K.; Sanders, S.R. Model-based fault detection and identification for switching power converters. IEEE Trans. Power Electron. 2017, 32, 1419–1430. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Masrur, M.; Chen, Z.; Zhang, B. Model-based fault diagnosis in electric drives using machine learning. IEEE/ASME Trans. Mechatron. 2006, 11, 290–303. [Google Scholar] [CrossRef]
- Hafizi, M.; Izadian, A. Model-based fault diagnosis of a DC-DC boost converters using hidden Markov model. In Proceedings of the IEEE International Conference on Electro-Information Technology, Rapid City, SD, USA, 9–11 May 2013; pp. 1–4. [Google Scholar]
- Chu, S.Y.; Avestruz, A. Electromagnetic model-based foreign object detection for wireless power transfer. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 16–19 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Turner, W.; Staino, A.; Basu, B. Residential HVAC fault detection using a system identification approach. Energy Build. 2017, 151, 1–17. [Google Scholar] [CrossRef]
- Iyengar, S.; Lee, S.; Irwin, D.; Shenoy, P.; Weil, B. WattHome: A data-driven approach for energy efficiency analytics at city-scale. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery Data Mining, London, UK, 19–23 August 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 396–405. [Google Scholar] [CrossRef]
- Fan, C.; Xiao, F.; Li, Z.; Wang, J. Unsupervised data analytics in mining big building operational data for energy efficiency enhancement: A review. Energy Build. 2018, 159, 296–308. [Google Scholar] [CrossRef]
- Mirnaghi, M.S.; Haghighat, F. Fault detection and diagnosis of large-scale HVAC systems in buildings using data-driven methods: A comprehensive review. Energy Build. 2020, 229, 110492. [Google Scholar] [CrossRef]
- Ortego, P.; Diez-Olivan, A.; del Ser, J.; Sierra, B. Data augmentation for industrial prognosis using generative adversarial networks. In Intelligent Data Engineering and Automated Learning—IDEAL 2020; Analide, C., Novais, P., Camacho, D., Yin, H., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 113–122. [Google Scholar]
- Kihoon, C.; Namburu, S.M.; Azam, M.S.; Luo, J.; Pattipati, K.R.; Patterson-Hine, A. Fault diagnosis in HVAC chillers. IEEE Instrum. Meas. Mag. 2005, 8, 24–32. [Google Scholar] [CrossRef]
- Namburu, S.M.; Azam, M.S.; Luo, J.; Choi, K.; Pattipati, K.R. Data-driven modeling, fault diagnosis and optimal sensor selection for HVAC chillers. IEEE Trans. Autom. Sci. Eng. 2007, 4, 469–473. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, G.; Wang, J.; Chen, H.; Zhong, H.; Cao, Z. A comparison study of basic data driven fault diagnosis methods for variable refrigerant flow system. Energy Build. 2020, 224, 110232. [Google Scholar] [CrossRef]
- Liao, L.; Köttig, F. Review of hybrid prognostics approaches for remaining useful life prediction of engineered systems, and an application to battery life prediction. IEEE Trans. Reliab. 2014, 63, 191–207. [Google Scholar] [CrossRef]
- Amin-Naseri, M.; Soroush, A. Combined use of unsupervised and supervised learning for daily peak load forecasting. Energy Convers. Manag. 2008, 49, 1302–1308. [Google Scholar] [CrossRef]
- Piscitelli, M.S.; Mazzarelli, D.M.; Capozzoli, A. Enhancing operational performance of AHUs through an advanced fault detection and diagnosis process based on temporal association and decision rules. Energy Build. 2020, 226, 110369. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z.; Wang, S.; Li, W.; Sarkodie-Gyan, T.; Feng, S. A hybrid deep-learning model for fault diagnosis of rolling bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Hassanpour, H.; Mhaskar, P.; House, J.M.; Salsbury, T.I. A hybrid modeling approach integrating first-principles knowledge with statistical methods for fault detection in HVAC systems. Comput. Chem. Eng. 2020, 142, 107022. [Google Scholar] [CrossRef]
- Tidriri, K.; Tiplica, T.; Chatti, N.; Verron, S. A new hybrid approach for fault detection and diagnosis. In Proceedings of the 20th World Congress of the International Federation of Automatic Control, Toulose, France, 9–14 July 2017; Volume 50. [Google Scholar]
- Frank, S.; Heaney, M.; Jin, X.; Robertson, J.; Cheung, H.; Elmore, R.; Henze, G. Hybrid Model-Based and Data-Driven Fault Detection and Diagnostics for Commercial Buildings: Preprint. In Proceedings of the 2016 ACEEE Summer Study on Energy Efficiency in Buildings Conference, Pacific Grove, CA, USA, 21–26 August 2016. [Google Scholar]
- Alam, M.A.; Azarian, M.H.; Osterman, M.; Pecht, M. Prognostics of failures in embedded planar capacitors using model-based and data-driven approaches. J. Intell. Mater. Syst. Struct. 2011, 22, 1293–1304. [Google Scholar] [CrossRef]
- Luo, M.; Wang, D.; Pham, M.; Low, C.B.; Zhang, J.B.; Zhang, D.H.; Zhao, Y.Z. Model-based fault diagnosis/prognosis for wheeled mobile robots: A review. In Proceedings of the 31st Annual Conference of IEEE Industrial Electronics Society, IECON 2005, Raleigh, NC, USA, 6–10 November 2005. [Google Scholar] [CrossRef]
- Aven, T. On the meaning of a black swan in a risk context. Saf. Sci. 2013, 57, 44–51. [Google Scholar] [CrossRef]
- Tahir, F.; Islam, M.T.; Mack, J.; Robertson, J.; Lovett, D. Process monitoring and fault detection on a hot-melt extrusion process using in-line Raman spectroscopy and a hybrid soft sensor. Comput. Chem. Eng. 2019, 125, 400–414. [Google Scholar] [CrossRef] [Green Version]
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-driven soft sensors in the process industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef] [Green Version]
- Wilhelm, Y.; Reimann, P.; Gauchel, W.; Mitschang, B. Overview on hybrid approaches to fault detection and diagnosis: Combining data-driven, physics-based and knowledge-based models. Procedia CIRP 2021, 99, 278–283, 14th CIRP Conference on Intelligent Computation in Manufacturing Engineering, 15–17 July 2020. [Google Scholar] [CrossRef]
- Bhanot, V.; Bacellar, D.; Ling, J.; Alabdulkarem, A.; Aute, V.; Radermacher, R. Steady state and transient validation of heat pumps using alternative lower-GWP refrigerants paper. In Proceedings of the 15th International Refrigeration and Air Conditioning Conference, Purdue, IN, USA, 14–17 July 2014; Purdue University: West Lafayette, IN, USA, 2014. [Google Scholar]
- Ackoff, R.L. Towards a System of Systems Concepts. Manag. Sci. 1971, 17, 661–671. [Google Scholar] [CrossRef]
- Abdoli, S.; Kara, S.; Hauschild, M. System interaction, system of systems, and environmental impact of products. CIRP Ann. 2019, 68, 17–20. [Google Scholar] [CrossRef]
- Uday, P.; Chandrahasa, R.; Marais, K. System importance measures: Definitions and application to system-of-systems analysis. Reliab. Eng. Syst. Saf. 2019, 191, 106582. [Google Scholar] [CrossRef]
- Office of the Deputy under Secretary of Defense for Acquisition and Technology, Systems and Software Engineering. Systems Engineering Guide for Systems of Systems, Version 1.0; ODUSD(A&T)SSE: Washington, DC, USA, 2008. [Google Scholar]
- Fornlöf, V.; Galar, D.; Syberfeldt, A.; Almgren, T. Aircraft engines: A maintenance trade-off in a complex system. In Proceedings of the International Conference on Quality, Reliability and Infocom Technology, Delhi, India, 28–30 December 2015. [Google Scholar]
- Gálvez, A.; Seneviratne, D.; Galar, D. Development and synchronisation of a physics-based model for heating, ventilation and air conditioning system integrated into a hybrid model. Int. J. Hydromechatron. 2021. [Google Scholar] [CrossRef]
- Gálvez, A.; Diez-Olivan, A.; Seneviratne, D.; Galar, D. Synthetic data generation in hybrid modelling of railway HVAC system. In Proceedings of the 17th IMEKO TC 10 and EUROLAB Virtual Conference: “Global Trends in Testing, Diagnostics Inspection for 2030”, Online, 20–22 October 2020; pp. 79–84. [Google Scholar]
- Galvez, A.; Seneviratne, D.; Galar, D.; Juuso, E. Feature assessment for a hybrid model. In Proceedings of the Fifth International Conference on Maintenance, Condition Monitoring and Diagnostics, MCMD 2021, Online, 16–17 February 2021. [Google Scholar]
- Bastos, P.; Lopes, I.; Pires, L. Application of data mining in a maintenance system for failure prediction. In Safety, Reliability and Risk Analysis: Beyond the Horizon: 22nd European Safety and Reliability; Taylor & Francis Group: London, UK, 2020; pp. 933–940. [Google Scholar]
- Zhang, C.; Liu, C.; Zhang, X.; Almpanidis, G. An up-to-date comparison of state-of-the art classification algorithms. Expert Syst. Appl. 2017, 82, 128–150. [Google Scholar] [CrossRef]
- Moosavian, A.; Ahmadi, H.; Sakhaei, B.; Labbafi, R. Support vector machine and K-nearest neighbour for unbalanced fault detection. J. Qual. Maint. Eng. 2014, 20, 65–75. [Google Scholar] [CrossRef]
- Wakiru, J.; Pintelon, L.; Muchiri, P.; Chemweno, P. A data mining approach for lubricant-based fault diagnosis. J. Qual. Maint. Eng. 2020. [Google Scholar] [CrossRef]
- Kabasakal, I.; Keskin, F.D.; Koçak, A.; Soyuer, H. A prediction model for fault detection in molding process based on logistic regression technique. In Proceedings of the International Symposium for Production Research 2019; Durakbasa, N.M., Gençyılmaz, M.G., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 351–360. [Google Scholar]
- Piryonesi, S.M.; El-Diraby, T.E. Data analytics in asset management: Cost-effective prediction of the pavement condition index. J. Infrastruct. Syst. 2019, 26. [Google Scholar] [CrossRef]
- Radha, P.; Divya, R. An Efficient Detection of HCC-recurrence in Clinical Data Processing using Boosted Decision Tree Classifier. Procedia Comput. Sci. 2020, 167, 193–204. [Google Scholar] [CrossRef]
- Santos, P.; Amado, C.; Coelho, S.T.; Leitão, J.P. Stochastic data mining tools for pipe blockage failure prediction. Urban Water J. 2017, 14, 343–353. [Google Scholar] [CrossRef]
- Martinez, A.M.; Kak, A.C. PCA versus LDA. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 228–233. [Google Scholar] [CrossRef] [Green Version]
- Magoulès, F.; Zhao, H.X.; Elizondo, D. Development of an RDP neural network for building energy consumption fault detection and diagnosis. Energy Build. 2013, 62, 133–138. [Google Scholar] [CrossRef]
- Du, Z.; Fan, B.; Jin, X.; Chi, J. Fault detection and diagnosis for buildings and HVAC systems using combined neural networks and subtractive clustering analysis. Build. Environ. 2014, 73, 1–11. [Google Scholar] [CrossRef]
- Li, D.; Hu, G.; Spanos, C. A data-driven strategy for detection and diagnosis of building chiller faults using linear discriminant analysis. Energy Build. 2016, 128, 519–529. [Google Scholar] [CrossRef]
- Han, H.; Gu, B.; Hong, Y.; Kang, J. Automated FDD of multiple-simultaneous faults (MSF) and the application to building chillers. Energy Build. 2011, 43, 2524–2532. [Google Scholar] [CrossRef]
- Yan, Y.; Cai, J.; Li, T.; Zhang, W.; Sun, L. Fault prognosis of HVAC air handling unit and its components using hidden-semi Markov model and statistical process control. Energy Build. 2021, 240, 110875. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Type |
|---|---|
| Temperature after compressor 1—virtual | Signal (continuous) |
| Temperature after compressor 2—virtual | Signal (continuous) |
| Temperature before compressor 1—virtual | Signal (continuous) |
| Temperature before compressor 2—virtual | Signal (continuous) |
| Pressure after compressor 1—real | Signal (continuous) |
| Pressure after compressor 2—real | Signal (continuous) |
| Pressure before compressor 1—real | Signal (continuous) |
| Pressure before compressor 2—real | Signal (continuous) |
| Pressure after air filter—virtual | Signal (continuous) |
| Pressure before air filter—virtual | Signal (continuous) |
| Real heat transfer—virtual | Signal (continuous) |
| Mass flow rate—virtual | Signal (continuous) |
| CO2 level—real | Signal (continuous) |
| Vehicle temperature—real | Signal (continuous) |
| Impulsion temperature—real | Signal (continuous) |
| Fault code | Condition Variable (discrete) |
| Healthy | Faulty | ||
|---|---|---|---|
| Real | 41 | 109 | |
| Synthetic | 66 | 575 | |
| Total | 107 | 684 | 791 |
| Fault Code | Failure Mode |
|---|---|
| 0 or 0000 | Healthy state of the system |
| 1 or 0001 | Obstruction of the air filter |
| 10 or 0010 | Deviation of the compression rate |
| 100 or 0100 | Deviation in the CO2 sensor |
| 1000 | Pressure deviation in the low-pressure side of the refrigerant circuit |
| Trained Models | Accuracy—Validation Set | Accuracy—Testing Set |
|---|---|---|
| Decision Tree—Fine Tree | 73.3% | 67.3% |
| Decision Tree—Medium Tree | 63.4% | 56.8% |
| Decision Tree—Coarse Tree | 35.8% | 32.7% |
| Linear Discriminant | - | - |
| Quadratic Discriminant | - | - |
| Naïve Bayes—Gaussian Naïve Bayes | - | - |
| Naïve Bayes—Kernel Naïve Bayes | - | - |
| SVM—Linear SVM | 25.0% | 24.1% |
| SVM—Quadratic SVM | 26.1% | 24.1% |
| SVM—Cubic SVM | 28.5% | 24.7% |
| SVM—Fine Gaussian SVM | 13.5% | 13.6% |
| SVM—Medium Gaussian SVM | 15.9% | 18.5% |
| SVM—Coarse Gaussian SVM | 13.5% | 15.4% |
| k-NN—Fine k-NN | 15.9% | 25.9% |
| k-NN—Medium k-NN | 13.5% | 19.8% |
| k-NN—Coarse k-NN | 27.7% | 17.3% |
| k-NN—Cosine k-NN | 21.1% | 19.8% |
| k-NN—Cubic k-NN | 20.7% | 18.5% |
| k-NN—Weighted k-NN | 25.8% | 26.5% |
| Ensemble—Boosted Trees | 87.8% | 92.6% |
| Ensemble—Bagged Trees | 82.0% | 87.0% |
| Ensemble—Subspace Discriminant | 27.5% | 27.8% |
| Ensemble—Subspace k-NN | 42.8% | 48.1% |
| Ensemble—RUSBoosted Trees | 48.6% | 56.8% |
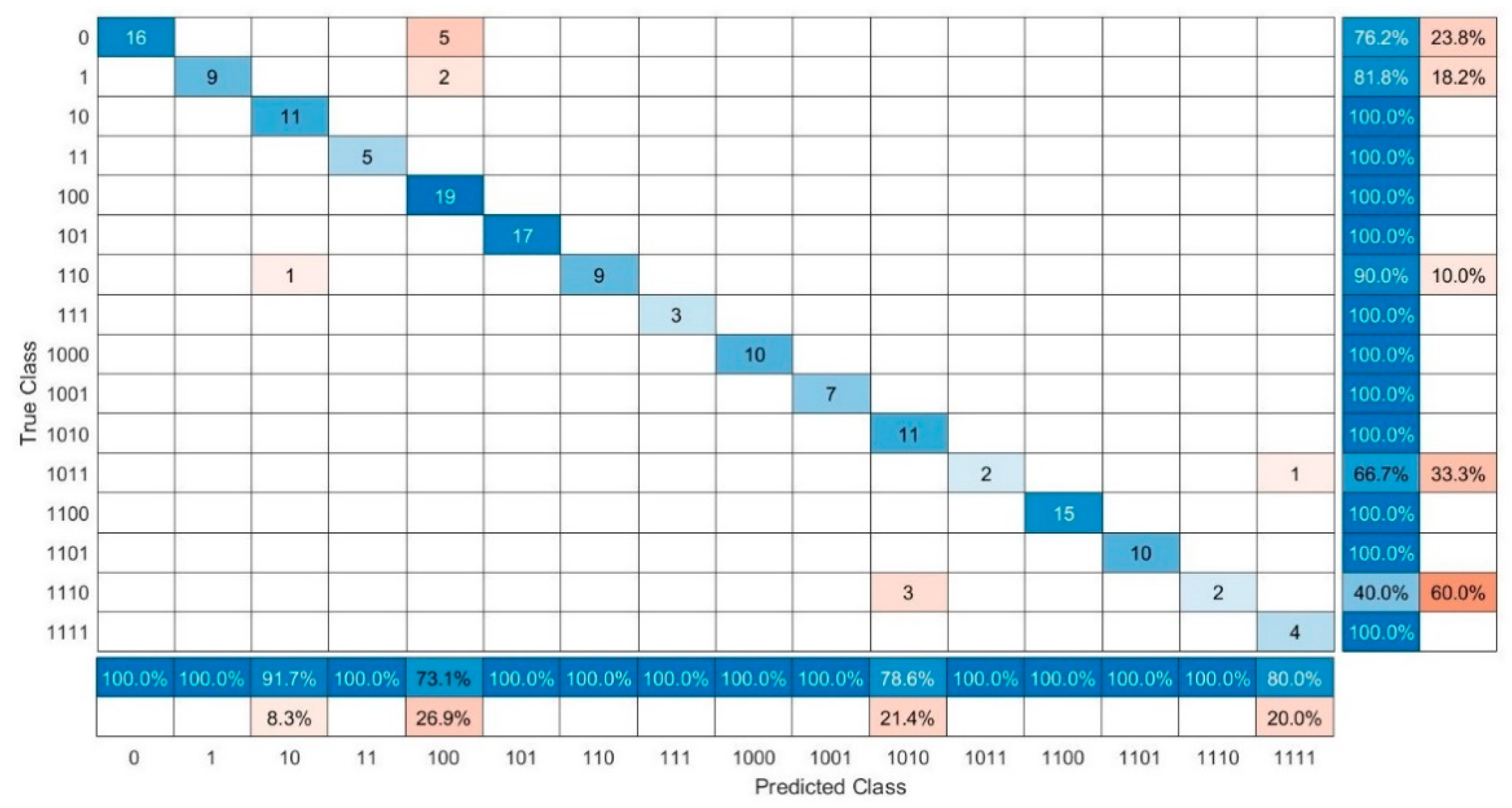
| Fault Code | False Positives | False Negatives |
|---|---|---|
| 0000 | 0.0% | 23.8% |
| 0001 | 0.0% | 18.2% |
| 0110 | 0.0% | 10.0% |
| 1011 | 0.0% | 33.3% |
| 1110 | 0.0% | 60.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gálvez, A.; Diez-Olivan, A.; Seneviratne, D.; Galar, D. Fault Detection and RUL Estimation for Railway HVAC Systems Using a Hybrid Model-Based Approach. Sustainability 2021, 13, 6828. https://doi.org/10.3390/su13126828
Gálvez A, Diez-Olivan A, Seneviratne D, Galar D. Fault Detection and RUL Estimation for Railway HVAC Systems Using a Hybrid Model-Based Approach. Sustainability. 2021; 13(12):6828. https://doi.org/10.3390/su13126828
Chicago/Turabian StyleGálvez, Antonio, Alberto Diez-Olivan, Dammika Seneviratne, and Diego Galar. 2021. "Fault Detection and RUL Estimation for Railway HVAC Systems Using a Hybrid Model-Based Approach" Sustainability 13, no. 12: 6828. https://doi.org/10.3390/su13126828
APA StyleGálvez, A., Diez-Olivan, A., Seneviratne, D., & Galar, D. (2021). Fault Detection and RUL Estimation for Railway HVAC Systems Using a Hybrid Model-Based Approach. Sustainability, 13(12), 6828. https://doi.org/10.3390/su13126828