
Thermal Feature Detection of Vehicle Categories in the Urban Area


Abstract
:1. Introduction
Application of Vehicle Detection and Classification
2. Materials and Methods
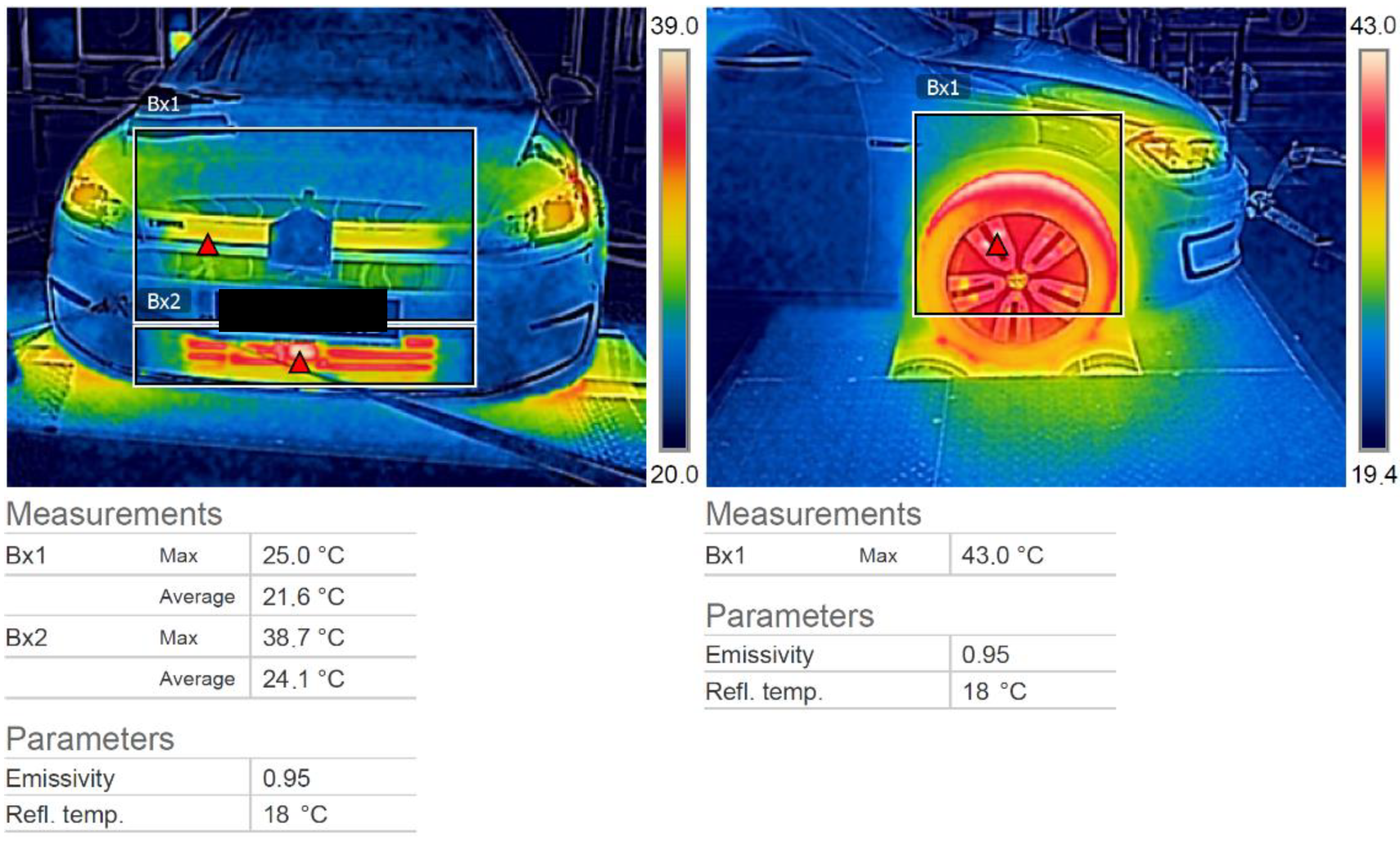
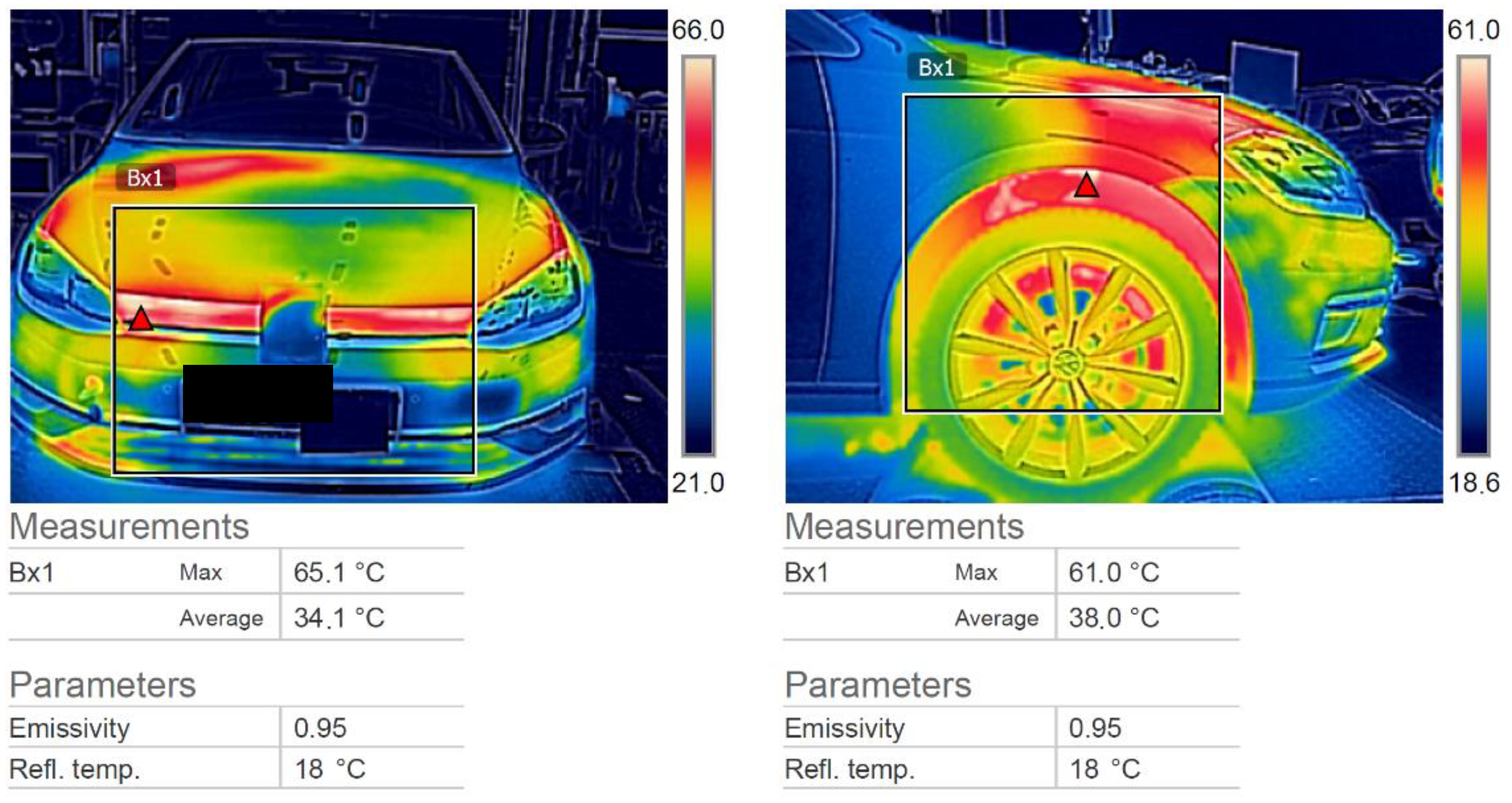
- (a)
- Mild temperature affects the vehicle body in detection area Bx1, and the warmest heat source is the radiator and its grille;
- (b)
- Second experimentally measured area Bx2 is independently heated due to passive radar and would distort the measurement.
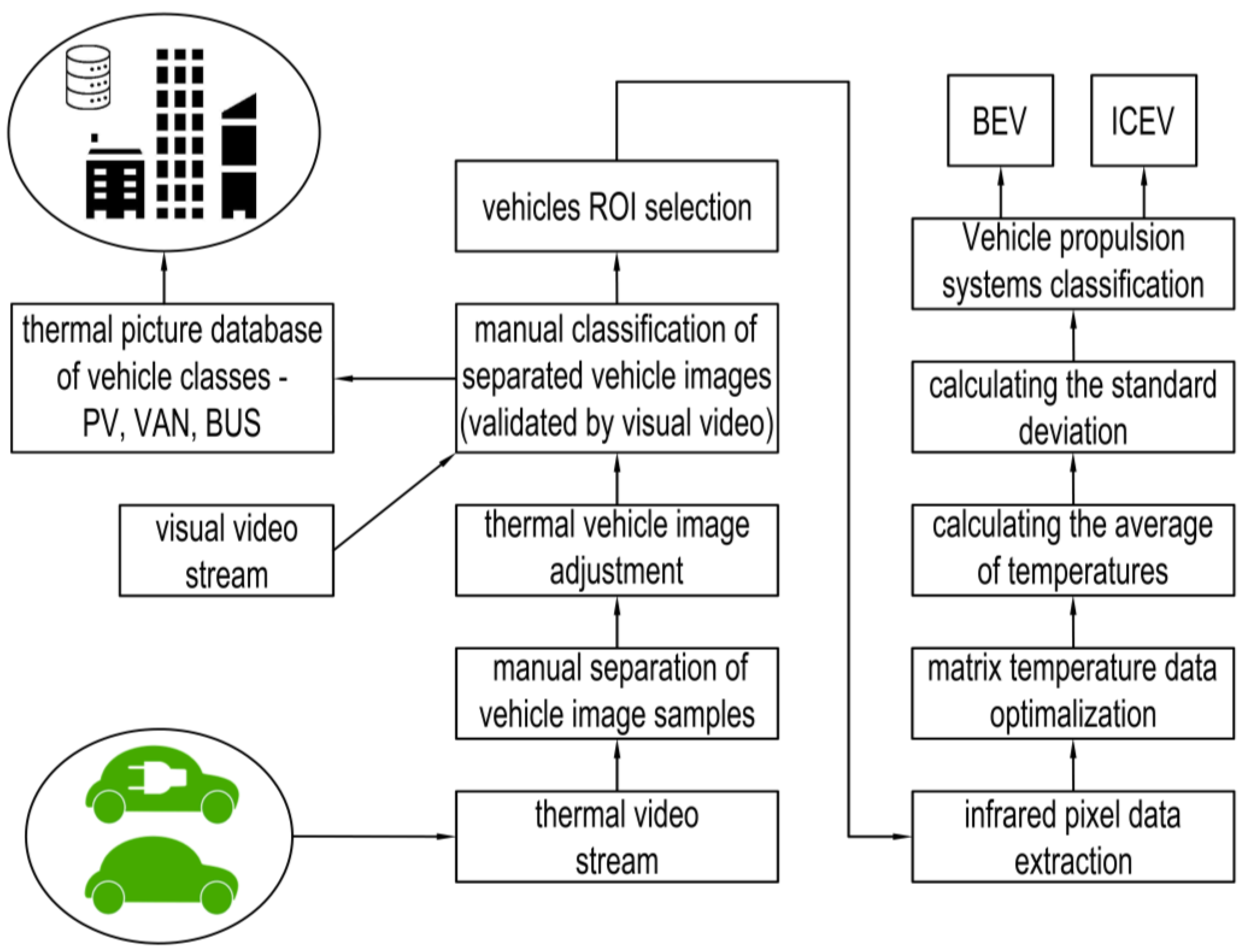
Proposed Method of Data Processing
- When calculating “σ”, if the standard deviation < threshold –”σ”, the vehicle is supposed to be BEV;
- When calculating “σ”, if the standard deviation is between thresholds –”σ“ and +”σ”, the vehicle is supposed to be ICEV.
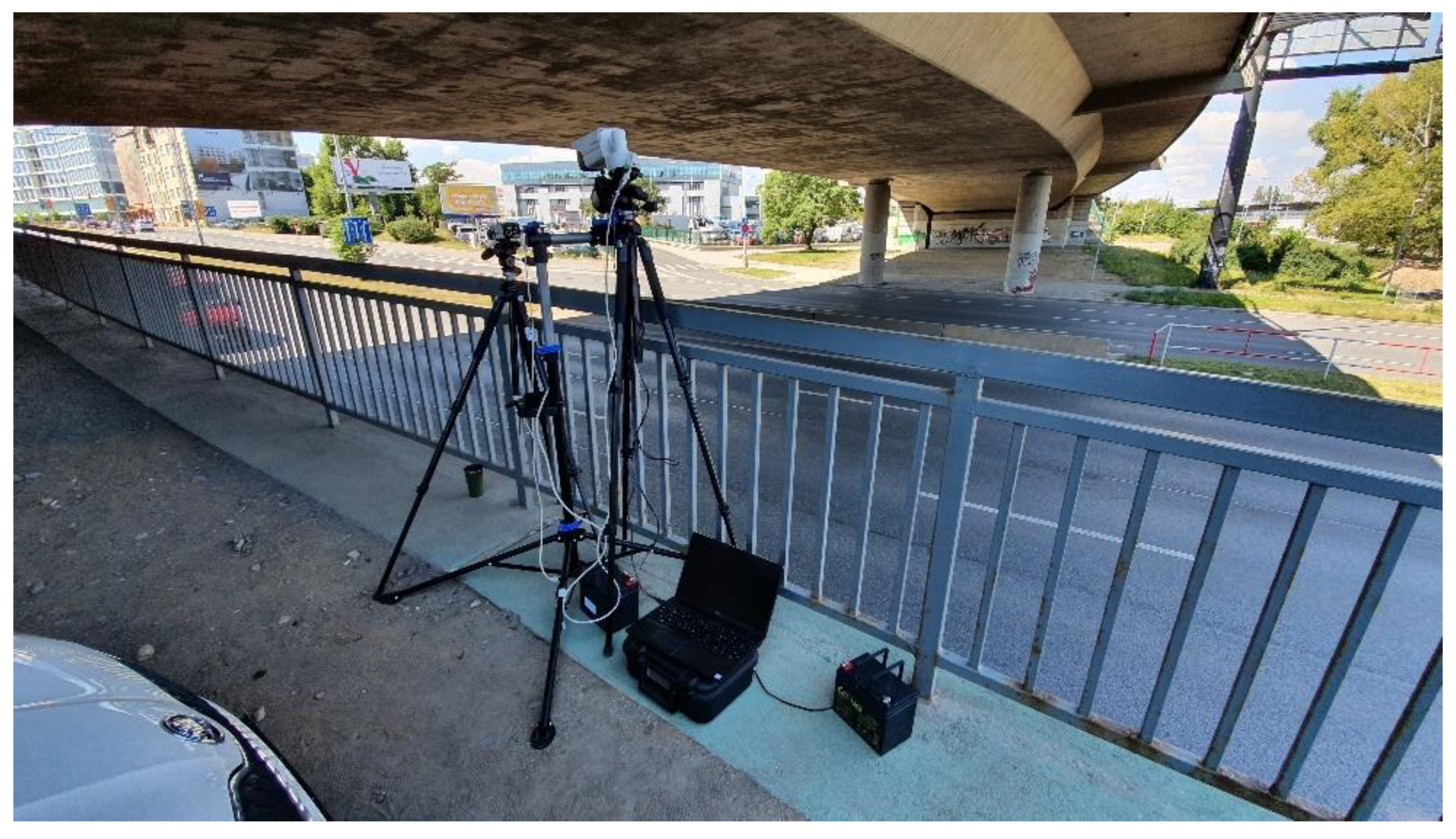
3. Methodology of Measurement
Procedure of Experiment with the FLIR E5 Camera and Visual RGB Camera
- atmospheric temperature, 19 °C;
- emissivity, 0.95;
- distance, 7 m;
- reflected temperature, 20 °C;
- relative humidity, 60%.
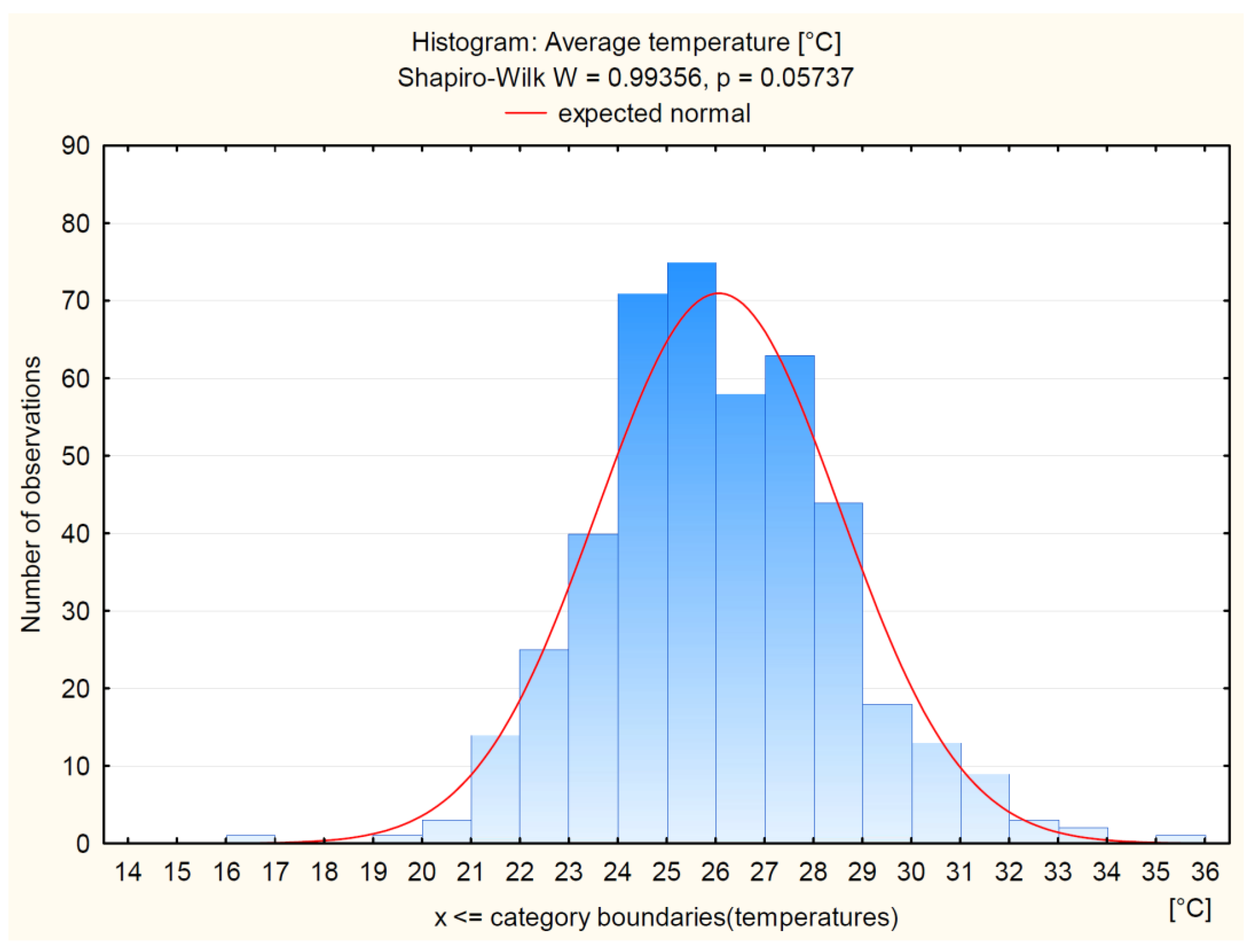
4. Results
5. Discussion
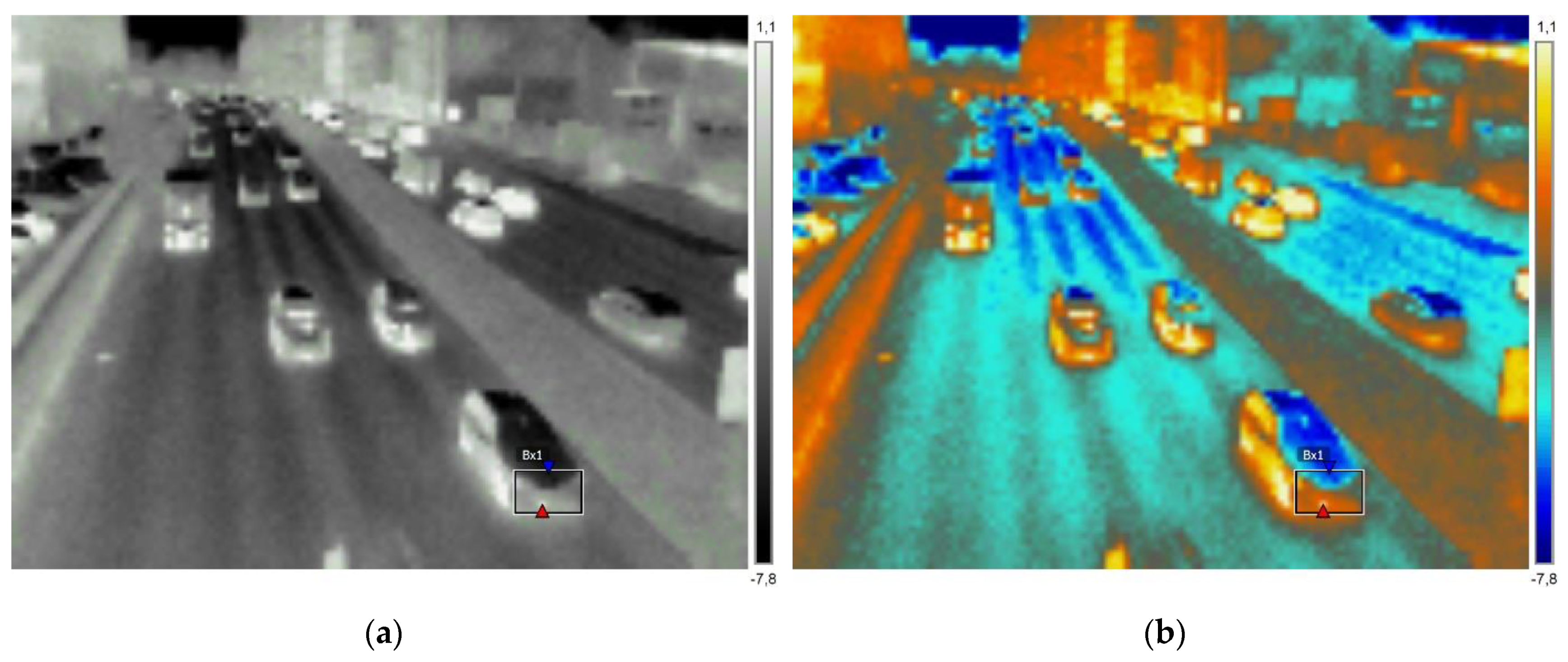
- The hypothesis confirmed in previous work in laboratory conditions was evaluated in real traffic conditions;
- The hypothesis is valid for an appropriate number of BEV vehicles in traffic flow for qualitative confirmation of all parts of the hypothesis;
- This paper provides a basic approach for the thermal detection of BEV in traffic flow;
- Varied lighting and weather conditions require a program for an automatic recalibration of thermal camera parameters;
- The convolution neural network software, vector machine, and other object detection and classification methods need to be adopted to increase the precision of the presented approach in the future.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vilarinho, C.; Tavares, J.P.; Rossetti, R.J.F. Intelligent Traffic Lights: Green Time Period Negotiaton. Transp. Res. Procedia 2017, 22, 325–334. [Google Scholar] [CrossRef]
- Li, C.; Guo, H.; Wang, W.; Jiang, X. Stabilization Analysis of Mixed Traffic Flow with Electric Vehicles Based on the Modified Multiple Velocity Difference Model. In Proceedings of the International Conference on Green Intelligent Transportation System and Safety, Changchun, China, 1–2 July 2017; pp. 251–261. [Google Scholar] [CrossRef]
- Robert, K. Night–Time Traffic Surveillance: A Robust Framework for Multi–Vehicle Detection, Classification and Tracking. In Proceedings of the 2009 Sixth IEEE International Conference on Advanced Video and Signal Based Surveillance, Genova, Italy, 2–4 September 2009; IEEE: Geneva, Switzerland, 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Bahler, S.J.; Kranig, J.M.; Minge, E.D. Field Test of Nonintrusive Traffic Detection Technologies. Transp. Res. Rec. J. Transp. Res. Board 1998, 1643, 161–170. [Google Scholar] [CrossRef]
- Fu, T.; Stipancic, J.; Zangenehpour, S.; Miranda–Moreno, L.; Saunier, N. Automatic Traffic Data Collection under Varying Lighting and Temperature Conditions in Multimodal Environments: Thermal versus Visible Spectrum Video–Based Systems. J. Adv. Transp. 2017, 2017, 1–15. [Google Scholar] [CrossRef]
- Zangenehpour, S.; Strauss, J.; Miranda–Moreno, L.F.; Saunier, N. Are Signalized Intersections with Cycle Tracks Safer? A Case–Control Study Based on Automated Surrogate Safety Analysis Using Video Data. Accid. Anal. Prev. 2016, 86, 161–172. [Google Scholar] [CrossRef]
- Ni, D. Determining Traffic–Flow Characteristics by Definition for Application in ITS. IEEE Trans. Intell. Transp. Syst. 2007, 8, 181–187. [Google Scholar] [CrossRef]
- Avery, R.P.; Wang, Y.; Rutherford, G.S. Length–Based Vehicle Classification Using Images from Uncalibrated Video Cameras. In Proceedings of the the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No.04TH8749), Washington, WA, USA, 3–6 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1993, pp. 737–742. [Google Scholar] [CrossRef]
- Zhang, G.; Avery, R.P.; Wang, Y. Video–Based Vehicle Detection and Classification System for Real–Time Traffic Data Collection Using Uncalibrated Video Cameras. Transp. Res. Rec. 2007, 1993, 138–147. [Google Scholar] [CrossRef] [Green Version]
- Goyal, A.; Verma, B. A Neural Network Based Approach for the Vehicle Classification. In Proceedings of the A Neural Network Based Approach for the Vehicle Classification, Honolulu, HI, USA, 1–5 April 2007; pp. 226–231. [Google Scholar] [CrossRef]
- Thi, T.H.; Robert, K.; Lu, S.; Zhang, J. Vehicle Classification at Nighttime Using Eigenspaces and Support Vector Machine. In Proceedings of the 2008 Congress on Image and Signal Processing, Vehicle Classification at Nighttime Using Eigenspaces and Support Vector Machine, Sanya, China, 27–30 May 2008; Volume 2, pp. 422–426. [Google Scholar] [CrossRef]
- Iwasaki, Y.; Kawata, S.; Nakamiya, T. Vehicle Detection Even in Poor Visibility Conditions Using Infrared Thermal Images and Its Application to Road Traffic Flow Monitoring. Lect. Notes Electr. Eng. 2011, 151, 997–1009. [Google Scholar] [CrossRef]
- Coifman, B. Freeway Detector Assessment: Aggregate Data from Remote Traffic Microwave Sensor. Transp. Res. Rec. J. Transp. Res. Board 2005, 1917, 149–163. [Google Scholar] [CrossRef]
- Zhou, J.; Gao, D.; Zhang, D. Moving Vehicle Detection for Automatic Traffic Monitoring. IEEE Trans. Veh. Technol. 2007, 56, 51–59. [Google Scholar] [CrossRef] [Green Version]
- Iwasaki, Y. A Method of Robust Moving Vehicle Detection for Bad Weather Using an Infrared Thermography Camera. In Proceedings of the International Conference on Wavelet Analysis and Pattern Recognition, Hong Kong, China, 30–31 August 2008; Volume 1, pp. 86–90. [Google Scholar] [CrossRef]
- Yoneyama, A.; Yeh, C.–H.; Kuo, C.–C.J. Robust Vehicle and Traffic Information Extraction for Highway Surveillance. EURASIP J. Adv. Signal. Process. 2005, 2005, 912501. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Park, Y. Measurement of Traffic Parameters in Image Sequence Using Spatio–Temporal Information. Meas. Sci. Technol. 2008, 19, 115503. [Google Scholar] [CrossRef]
- Iwasaki, Y.; Misumi, M.; Nakamiya, T. Robust Vehicle Detection under Various Environments to Realize Road Traffic Flow Surveillance Using an Infrared Thermal Camera. Sci. World J. 2015, 2015, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saunier, N.; Sayed, T. A Feature–Based Tracking Algorithm for Vehicles in Intersections. In Proceedings of the Third Canadian Conference on Computer and Robot Vision, CRV 2006, Quebec, QC, Canada, 7–9 June 2006; Volume 2006, p. 59. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Tomasi. Good Features to Track. In Proceedings of 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA,, 21–23 June 1994; Volume 178, pp. 593–600. [Google Scholar] [CrossRef]
- Sangnoree, A.; Chamnongthai, K. Thermal–Image Processing and Statistical Analysis for Vehicle Category in Nighttime Traffic. J. Vis. Commun. Image Represent. 2017, 48, 88–109. [Google Scholar] [CrossRef]
- Iwasaki, Y.; Misumi, M.; Nakamiya, T. Robust Vehicle Detection under Various Environmental Conditions Using an Infrared Thermal Camera and Its Application to Road Traffic Flow Monitoring. Sensors 2013, 13, 7756–7773. [Google Scholar] [CrossRef] [PubMed]
- Nam, Y.; Nam, Y.–C. Vehicle Classification Based on Images from Visible Light and Thermal Cameras. EURASIP J. Image Video Process 2018, 5, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Dalal, N.; Triggs, B. Histogram of Oriented Gradients for Human Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–26 June 2005; p. 8. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. NIPS 2012, 60, 84–90. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large–Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- Murthy, C.B.; Hashmi, M.F.; Bokde, N.D.; Geem, Z.W. Investigations of Object Detection in Images/Videos Using Various Deep Learning Techniques and Embedded Platforms–A Comprehensive Review. Appl. Sci. 2020, 10, 3280. [Google Scholar] [CrossRef]
- Nistor, S.C.; Ileni, T.A.; Dărăbant, A.S. Automatic Development of Deep Learning Architectures for Image Segmentation. Sustainability 2020, 12, 9707. [Google Scholar] [CrossRef]
- Ligocki, A.; Jelinek, A.; Zalud, L.; Rahtu, E. Fully Automated DCNN–Based Thermal Images Annotation Using Neural Network Pretrained on RGB Data. Sensors 2021, 21, 1552. [Google Scholar] [CrossRef] [PubMed]
- Ligocki, A.; Jelinek, A.; Zalud, L. Brno Urban Dataset–The New Data for Self–Driving Agents and Mapping Tasks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3284–3290. [Google Scholar] [CrossRef]
- FLIR Tools Thermal Analysis and Reporting (Desktop) | FLIR Systems. 2021. Available online: https://www.flir.com/products/flir–tools/ (accessed on 26 April 2021).
- FLIR E5 Infrared Camera with MSX® | FLIR Systems. 2020. Available online: https://www.flir.com/products/e5/ (accessed on 1 February 2020).
- HARDWARE INSTALLATION GUIDE VC58SMi–1.3 Megapixel Box Type IP Camera VC58SM3i–3.0 Megapixel Box Type IP Camera VC58EHi–Standard D1 Box Type IP Camera. 2021. Available online: http://www2.viakom.cz/stahuj/vision/manualy/VC58_Hardware_Installation_Guide_eng_20110922.pdf (accessed on 26 April 2021).
- IP Bullet Camera Hikvision, iDS–2CD7A26G0/P–IZHS.2020. Available online: https://www.kamery–hikvision.cz/bullet–kamery/9384–ids–2cd7a26g0–p–izhs8–32mm–2mpix–ip–bullet–kamera–ir–100mwdr–140db–audio–alarm–ip67–ik10–cteni–spz–heater–6941264056898.html (accessed on 25 May 2021).
- Svorc, D.; Tichy, T.; Ruzicka, M. Detection of the Electric Vehicle Using Thermal Characteristics. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- FLIR Systems. User’s Manual FLIR Tools/Tools+ 5.1. 2017. Available online: http://91.143.108.245/Downloads/Flir/Dokumentation/t810209-en-us_a4.pdf; (accessed on 25 May 2021).
- Scheffé, H. The Analysis of Variance, 1st ed.; Wiley–Interscience: New York, NY, USA, 1999. [Google Scholar]
- TIBCO StatisticaTM Trial Download for Windows | TIBCO Software. Available online: https://www.tibco.com/resources/product–download/tibco–statistica–trial–download–windows (accessed on 26 April 2021).
- Scheffé, H. A “Mixed Model” for the Analysis of Variance. Ann. Math. Stat. 1956, 23–36. Available online: http://www.jstor.org/stable/2236975 (accessed on 26 April 2021).
- Centrum Dopravniho Vyzkumu. Tiskove Zpravy–Počet Elektromobilů Se v České Republice Blíží Desetitisícové Hranici; Ostrava/Brno. 2021. Available online: https://www.cdv.cz/tisk/pocet-elektromobilu-se-v-ceske-republice-blizi-desetitisicove-hranici/ (accessed on 26 April 2021).
- Ministry of Transport of Czech Republic. Ministerstvo Dopravy ČR–Centrální Registr Vozidel. 2020. Available online: https://www.mdcr.cz/Statistiky/Silnicni–doprava/Centralni–registr–vozidel/Statistika?returl=/Statistiky/Silnicni–doprava/Centralni–registr–vozidel (accessed on 28 April 2020).
- The Technical Administration of Roads of the City of Prague–Department of Transport Engineering (TSK–ÚDI). Prague Transportation Yearbook 2019. Available online:https://www.czso.cz/csu/czso/statistical-yearbook-of-prague-2019Prague (accessed on 26 April 2021).
- Web Site of Minister of Transport. Registrační Značka Elektrického Vozidla–Platnost, Oprávnění, Výhody in CZ (Registration Number of an Electric Vehicle–Validity, Authorization, Benefits). 2020. Available online: https://www.mdcr.cz/Ministerstvo/Zadost–o–poskytnuti–informace–(1)/Poskytnute–informace/Registracni–znacka–elektrickeho–vozidla–––platnost?lang=cs–CZ (accessed on 28 April 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category of Vehicles | Number of Vehicles | Average Temp. (°C) | Standard Dev. |
|---|---|---|---|
| Passen. ICEV | 200 | 25.36486 | 2.286562 |
| VAN | 200 | 26.71089 | 2.383138 |
| Passen. BEV | 9 | 25.98951 | 2.244830 |
| BUS | 32 | 26.45461 | 3.147705 |
| All Groups | 441 | 26.06713 | 2.479222 |
| Category of Vehicles | Scheffe Test; Level of Significant p < 0.05000 | |||
|---|---|---|---|---|
| {1} | {2} | {3} | {4} | |
| Passen. ICEV Average Temperature {1} | 0.000001 | 0.900207 | 0.129651 | |
| VAN Average Temperature {2} | 0.000001 | 0.854726 | 0.957246 | |
| Passen. BEV Average Temperature {3} | 0.900207 | 0.854726 | 0.966665 | |
| BUS Average Temperature {4} | 0.129651 | 0.957246 | 0.966665 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tichý, T.; Švorc, D.; Růžička, M.; Bělinová, Z. Thermal Feature Detection of Vehicle Categories in the Urban Area. Sustainability 2021, 13, 6873. https://doi.org/10.3390/su13126873
Tichý T, Švorc D, Růžička M, Bělinová Z. Thermal Feature Detection of Vehicle Categories in the Urban Area. Sustainability. 2021; 13(12):6873. https://doi.org/10.3390/su13126873
Chicago/Turabian StyleTichý, Tomáš, David Švorc, Miroslav Růžička, and Zuzana Bělinová. 2021. "Thermal Feature Detection of Vehicle Categories in the Urban Area" Sustainability 13, no. 12: 6873. https://doi.org/10.3390/su13126873
APA StyleTichý, T., Švorc, D., Růžička, M., & Bělinová, Z. (2021). Thermal Feature Detection of Vehicle Categories in the Urban Area. Sustainability, 13(12), 6873. https://doi.org/10.3390/su13126873