
Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications

 ,
, 
 , ,
, ,  and
and 
Abstract
:1. Introduction
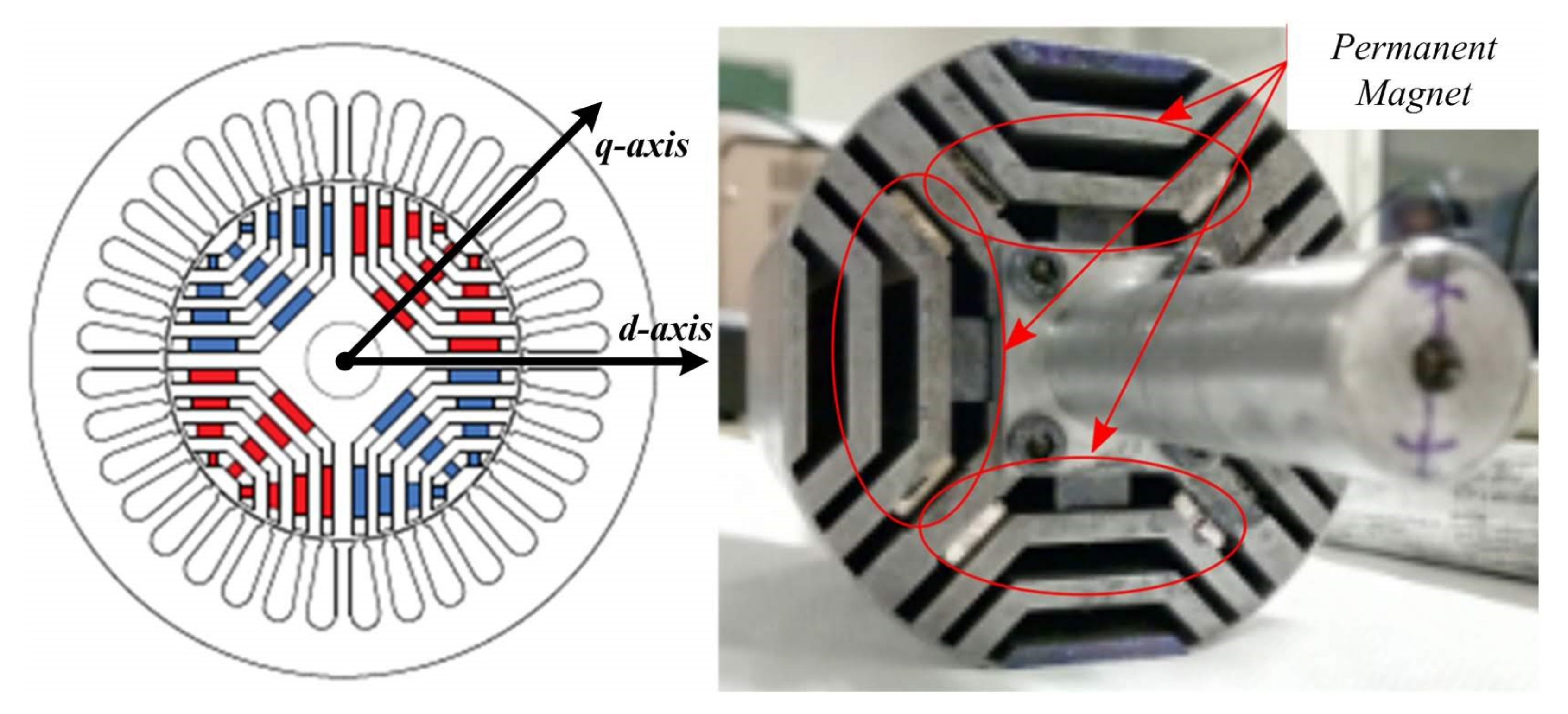
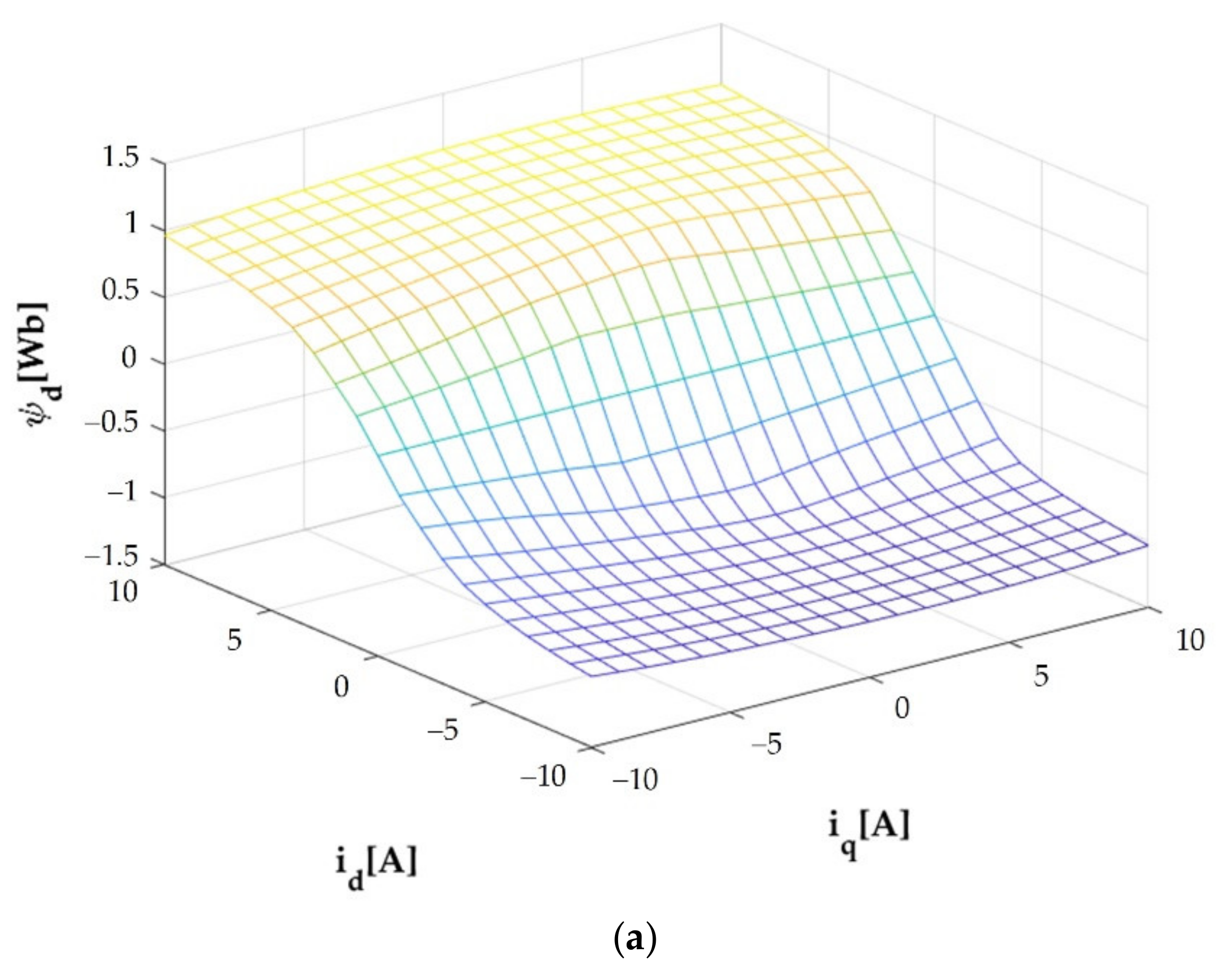
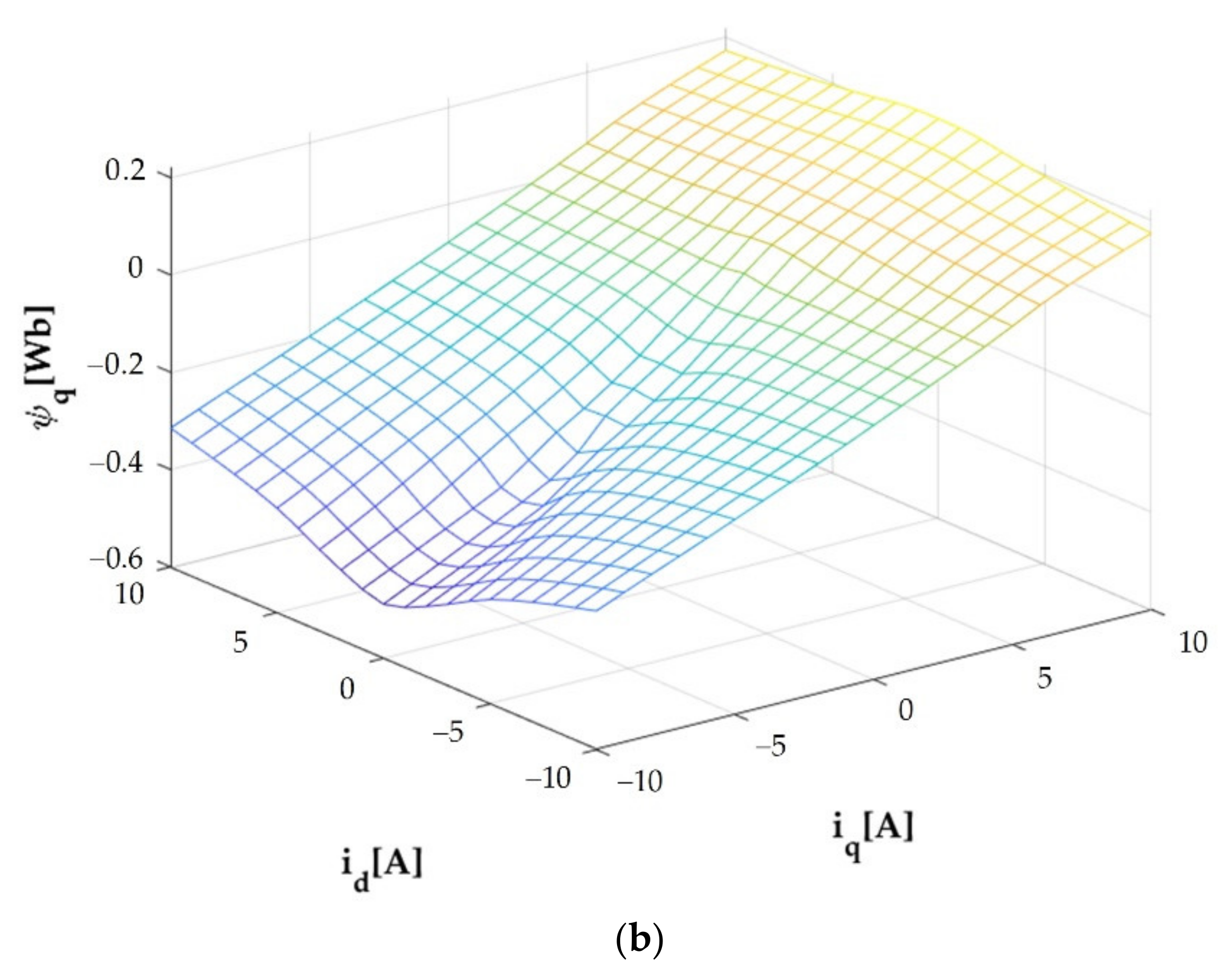
2. FEM-Based Magnetic Model
3. A Shot Briefly Differential Flatness Control and Control Law
3.1. Differential Flatness Briefly
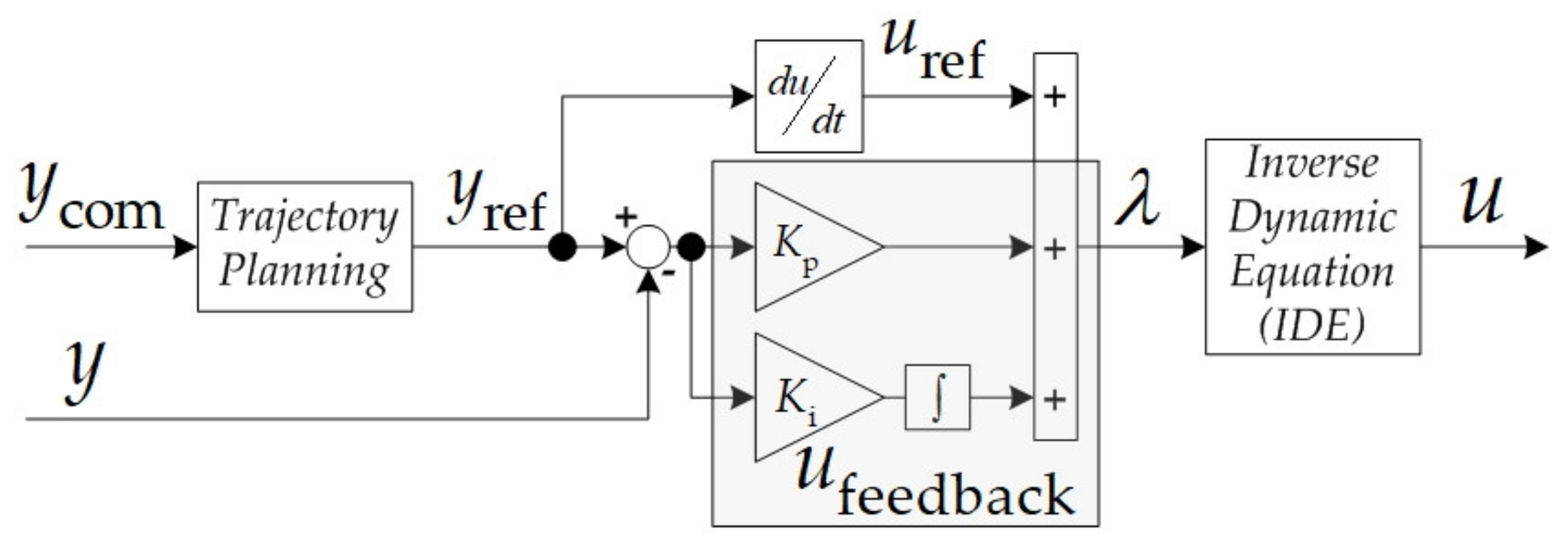
3.2. Control Law
4. PMa-SynRM Modeling and Development of the Proposed Control Scheme
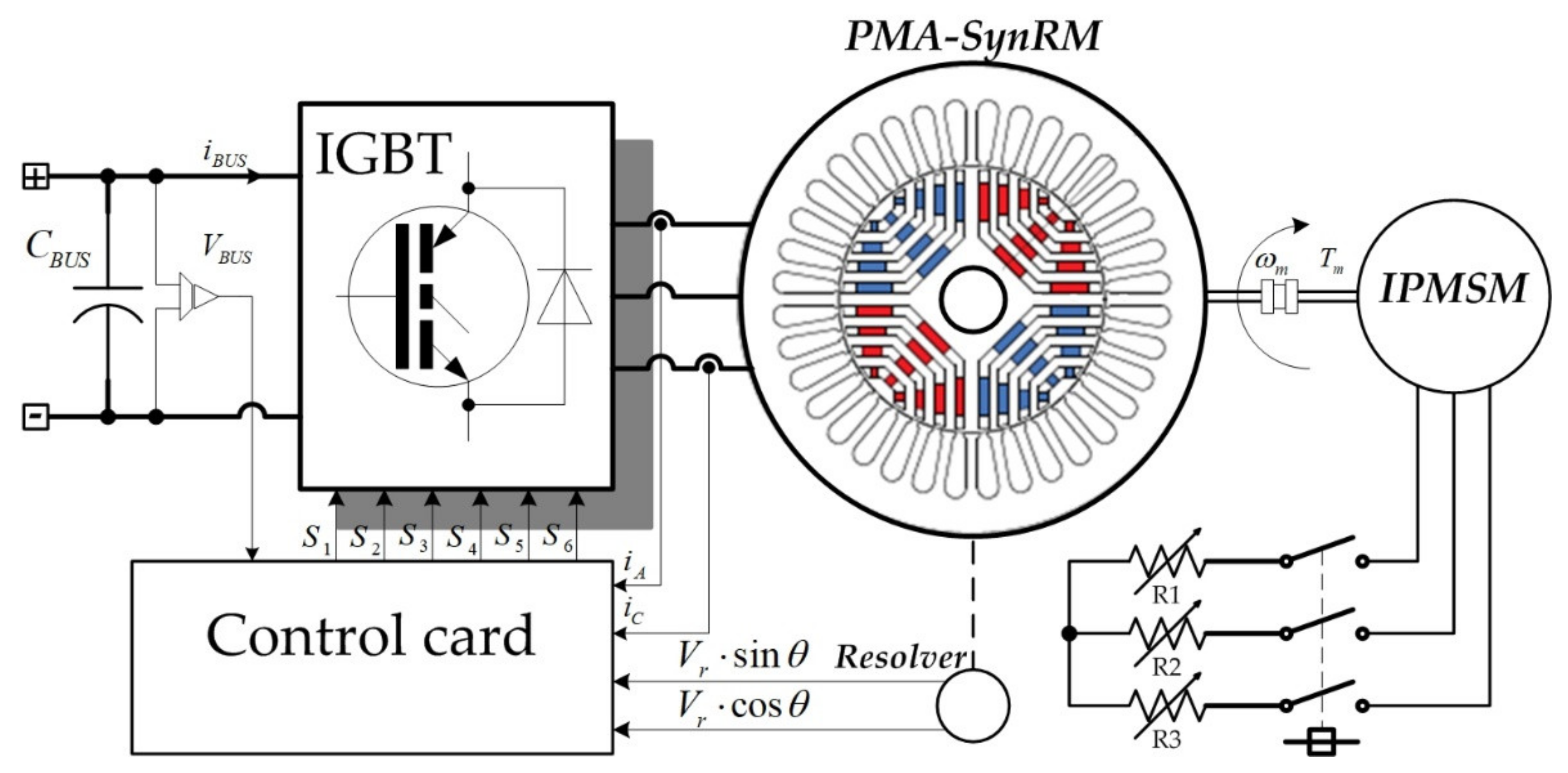
4.1. Mathematic Model of PMa-SynRM/Inverter
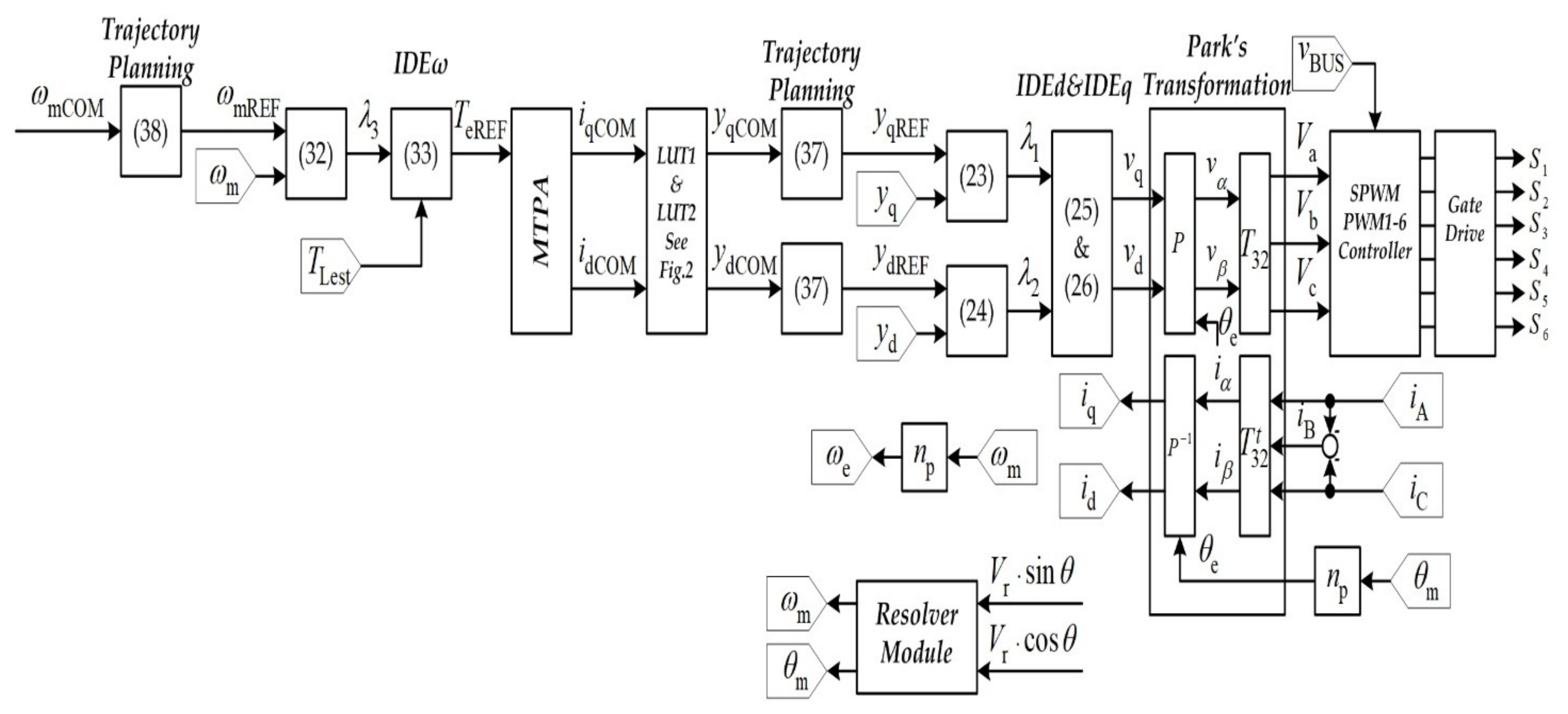
4.2. Differential Flatness Control of Current (or Torque) Loop Development
4.3. Differential Flatness Control of Speed Control Loop Development
4.4. Trajectory Planning
5. Simulation and Experimental Validation
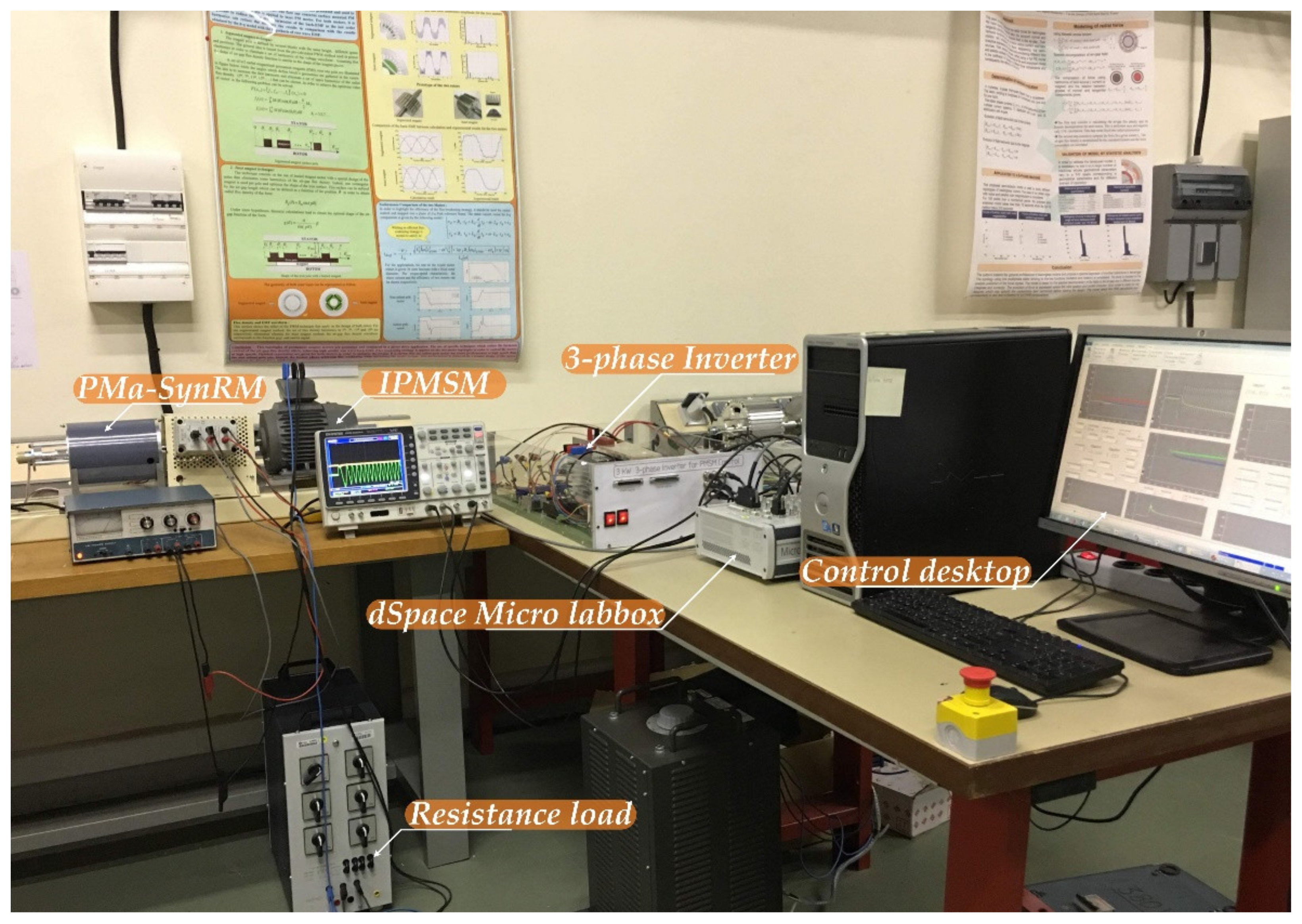
5.1. Experimental Setup
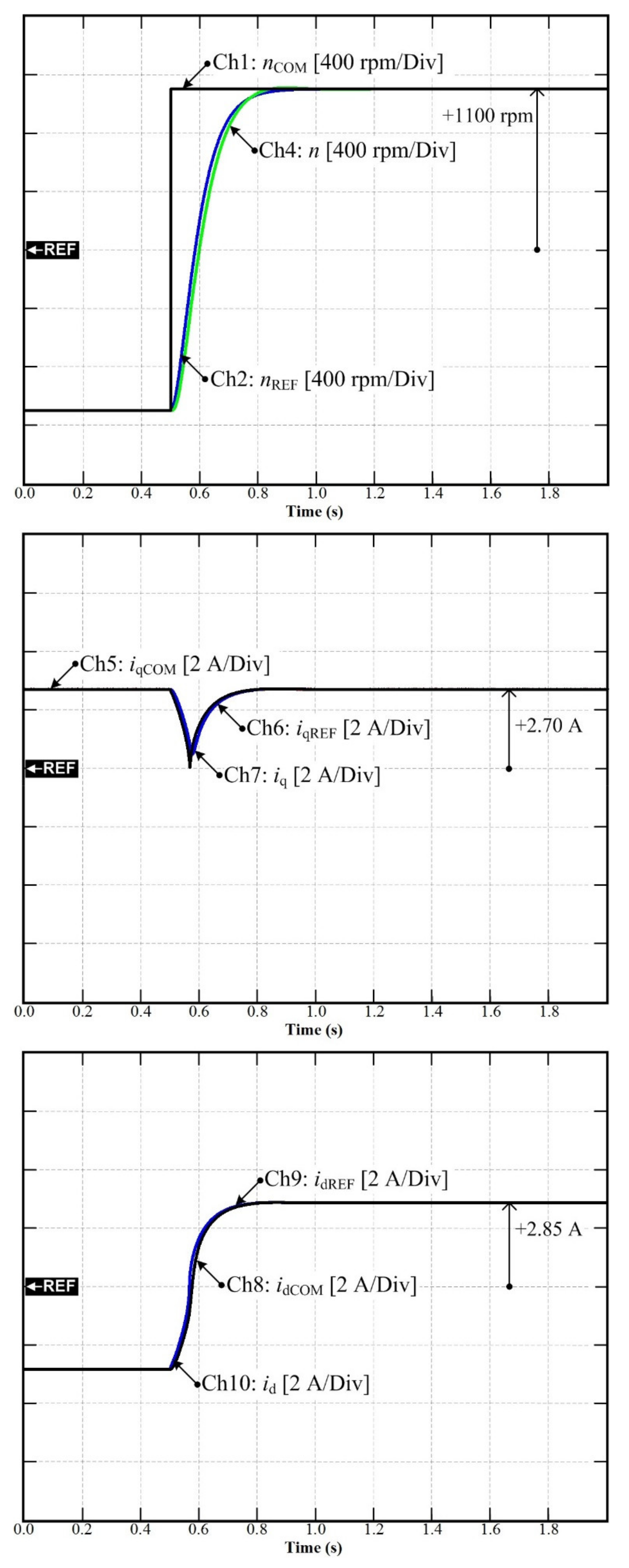
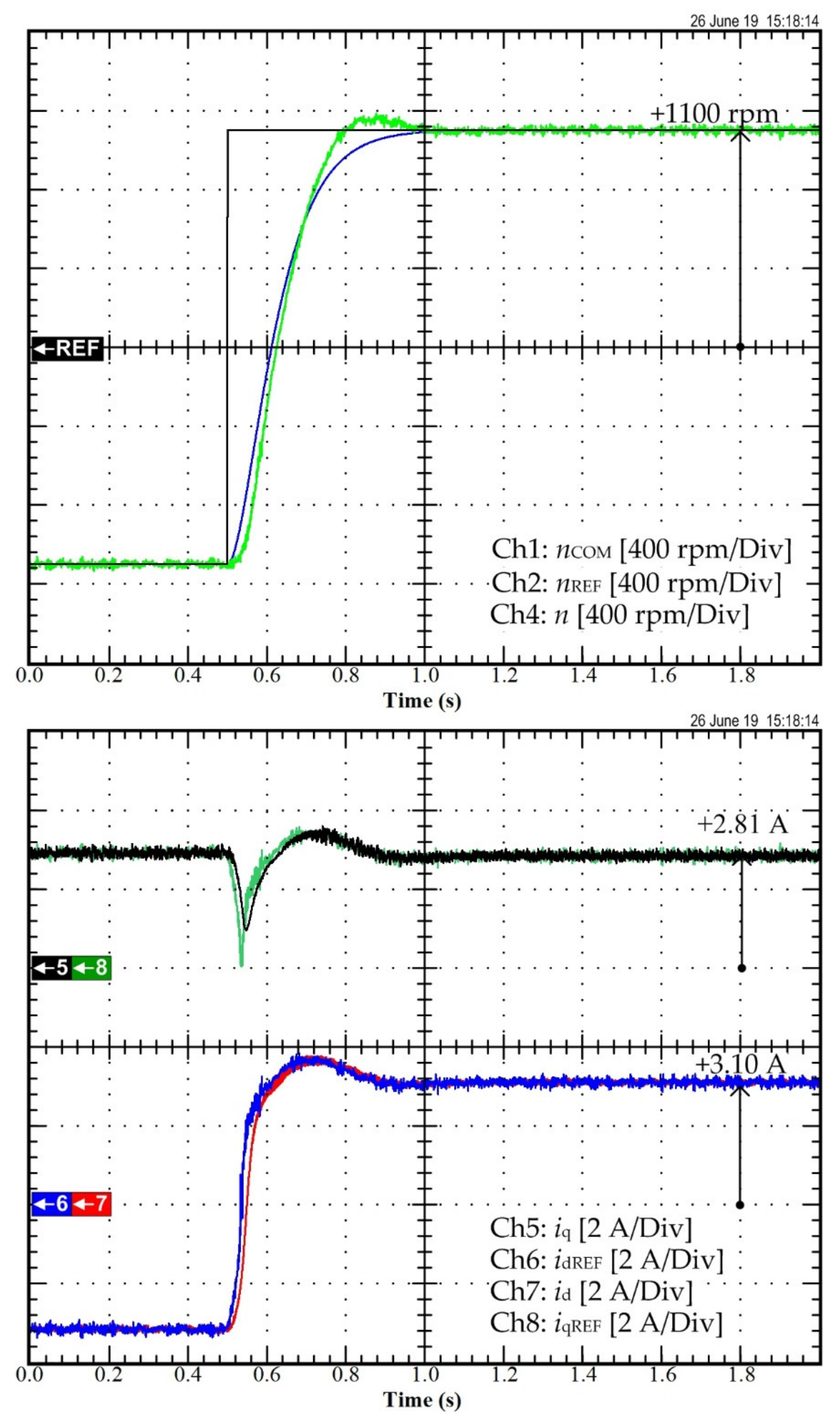
5.2. Simulation and Test-Bench Results of the Speed Reversal Employing the Differential Flatness Controller
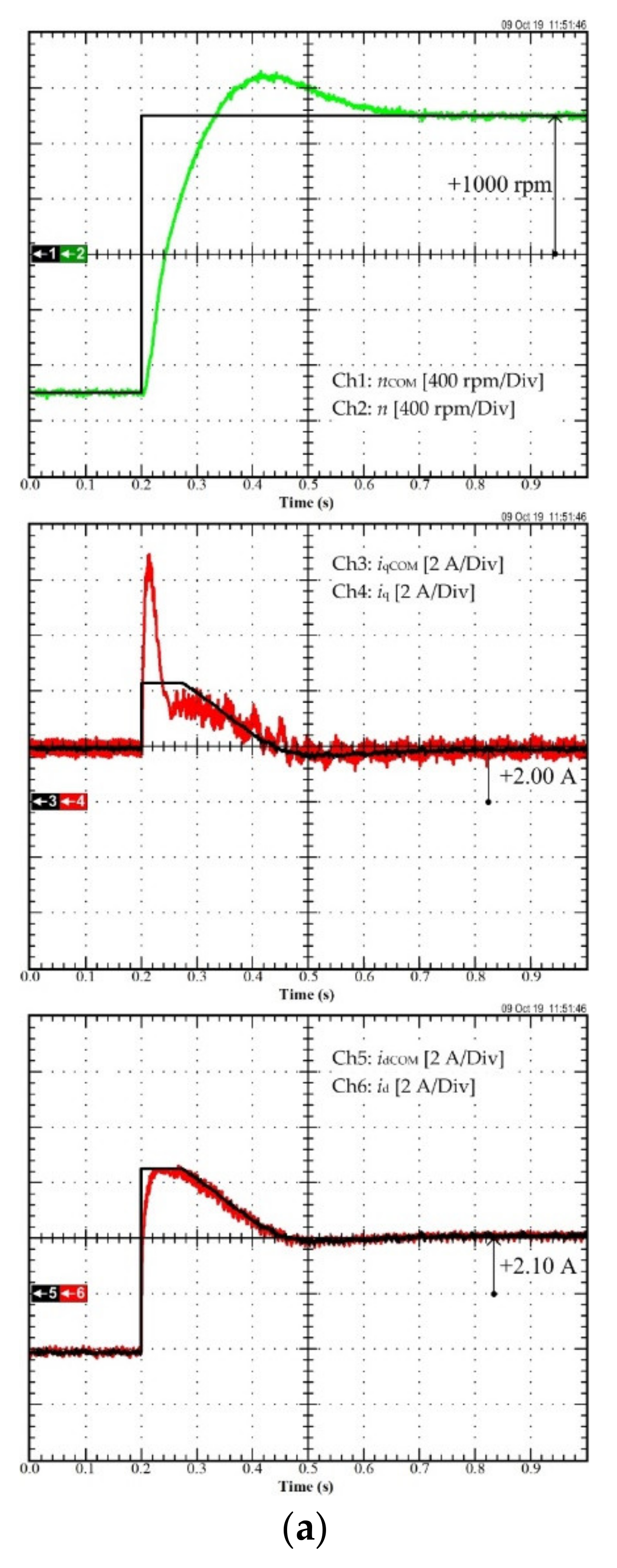
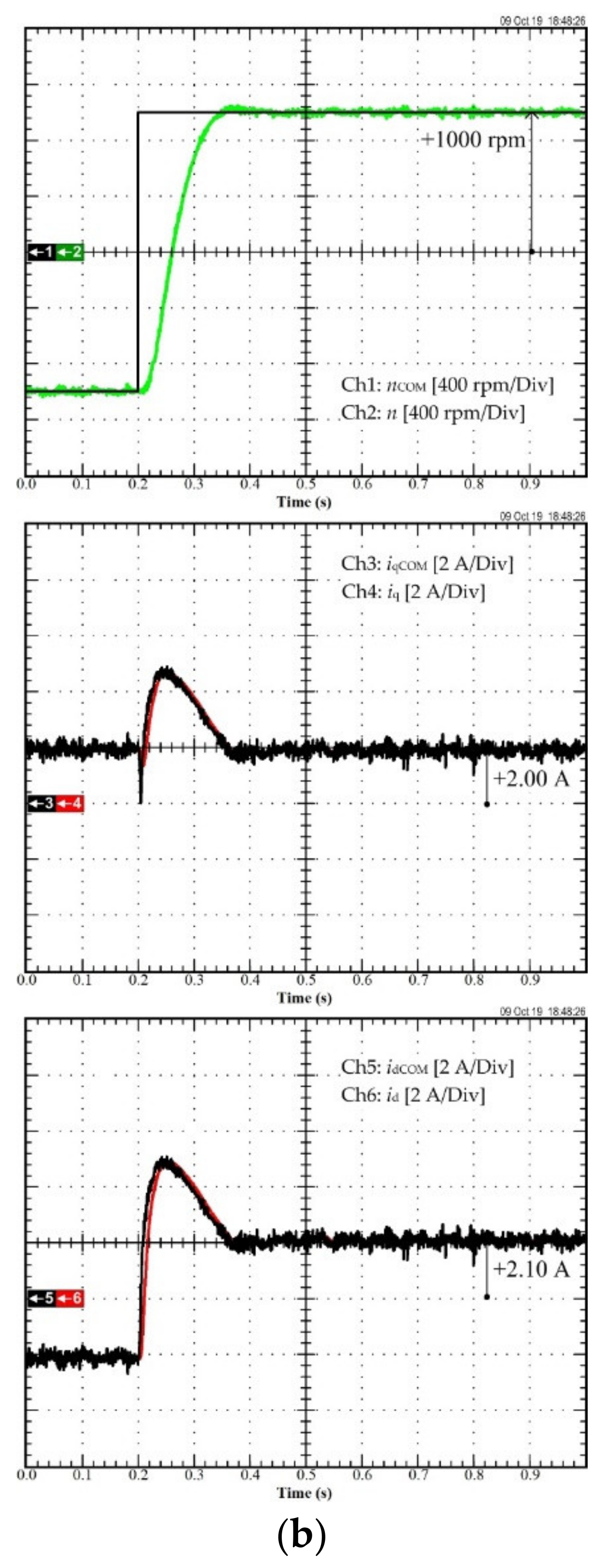
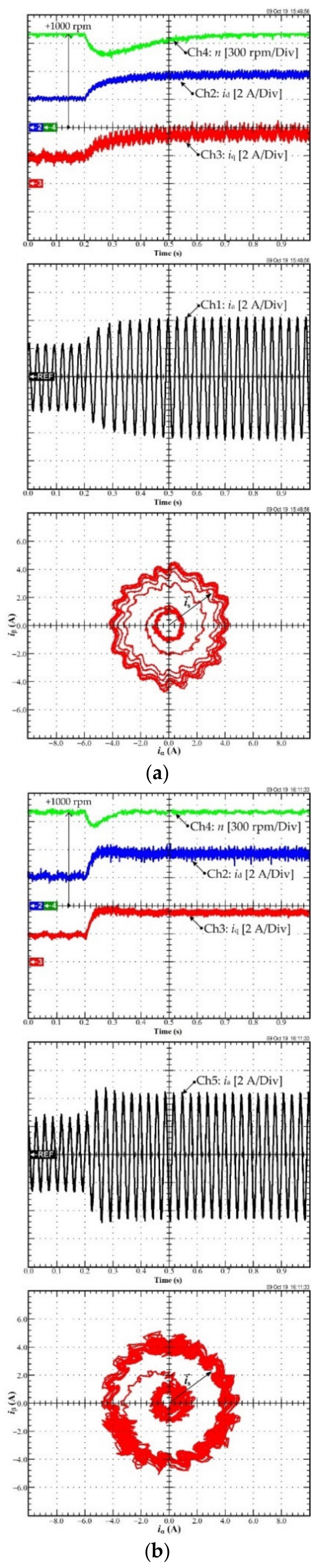
5.3. Experimental Results of the Comparison between the Conventional PI Control and Differential Flatness Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grasso, E.; Palmieri, M.; Corti, F.; Nienhaus, M.; Cupertino, F.; Grasso, F. Detection of stator turns short-circuit during sensorless operation by means of the Direct Flux Control technique. In Proceedings of the 2020 AEIT International Annual Conference (AEIT), Catania, Italy, 23–25 September 2020. [Google Scholar]
- Lim, C.; Rahim, N.; Hew, W.; Levi, E. Model Predictive Control of a Two-Motor Drive with Five-Leg-Inverter Supply. IEEE Trans. Ind. Electron. 2013, 60, 54–65. [Google Scholar] [CrossRef]
- Wang, L.; Jatskevich, J.; Dommel, H. Re-examination of Synchronous Machine Modeling Techniques for Electromagnetic Transient Simulations. IEEE Trans. Power Syst. 2007, 22, 1221–1230. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, Q.; Wang, W.; Zhou, X. Speed Regulation System of a Flux-Modulated Permanent-Magnet In-Wheel Motor Based on Sliding Mode Control and Adaptive Notch Filter. IEEE Trans. Energy Convers. 2018, 33, 2183–2190. [Google Scholar] [CrossRef]
- Erazo, D.; Wallscheid, O.; Bocker, J. Improved Fusion of Permanent Magnet Temperature Estimation Techniques for Synchronous Motors Using a Kalman Filter. IEEE Trans. Ind. Electron. 2020, 67, 1708–1717. [Google Scholar] [CrossRef]
- Morimoto, S.; Ooi, S.; Inoue, Y.; Sanada, M. Experimental Evaluation of a Rare-Earth-Free PMASynRM With Ferrite Magnets for Automotive Applications. IEEE Trans. Ind. Electron. 2014, 61, 5749–5756. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. Performance of PM-assisted synchronous reluctance motor for high-efficiency and wide constant-power operation. IEEE Trans. Ind. Appl. 2001, 37, 1234–1240. [Google Scholar] [CrossRef]
- Park, G.; Kim, J.; Son, B.; Jung, S. Optimal Design of PMa-synRM for an Electric Propulsion System Considering Wide Operation Range and Demagnetization. IEEE Trans. Appl. Supercond. 2018, 28, 1–4. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.; Pitic, C. PM-Assisted Reluctance Synchronous Motor/Generator (PM-RSM) for Mild Hybrid Vehicles: Electromagnetic Design. IEEE Trans. Ind. Appl. 2004, 40, 492–498. [Google Scholar] [CrossRef]
- Niazi, P.; Toliyat, H.; Goodarzi, A. Robust Maximum Torque per Ampere (MTPA) Control of PM-Assisted SynRM for Traction Applications. IEEE Trans. Veh. Technol. 2007, 56, 1538–1545. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Jurgens, J.; Marengo, L.; Fricasse, A.; Gragger, J. PM-Assisted Synchronous Reluctance Machine Flux Weakening Control for EV and HEV Applications. IEEE Trans. Ind. Electron. 2018, 65, 2986–2995. [Google Scholar] [CrossRef] [Green Version]
- Thounthong, P.; Sikkabut, S.; Poonnoy, N.; Mungporn, P.; Yodwong, B.; Kumam, P.; Bizon, N.; Nahid-Mobarakeh, B.; Pierfederici, S. Nonlinear Differential Flatness-Based Speed/Torque Control With State-Observers of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2018, 54, 2874–2884. [Google Scholar] [CrossRef]
- Thounthong, P.; Pierfederici, S.; Davat, B. Analysis of Differential Flatness-Based Control for a Fuel Cell Hybrid Power Source. IEEE Trans. Energy Convers. 2010, 25, 909–920. [Google Scholar] [CrossRef] [Green Version]
- Variani, M.; Tomsovic, K. Two-Level Control of Doubly Fed Induction Generator Using Flatness-Based Approach. IEEE Trans. Power Syst. 2016, 31, 518–525. [Google Scholar] [CrossRef]
- Menhour, L.; d’Andrea-Novel, B.; Fliess, M.; Gruyer, D.; Mounier, H. An Efficient Model-Free Setting for Longitudinal and Lateral Vehicle Control: Validation through the Interconnected Pro-SiVIC/RTMaps Prototyping Platform. IEEE Trans. Intell. Transp. Syst. 2018, 19, 461–475. [Google Scholar] [CrossRef] [Green Version]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Kerdsup, B.; Takorabet, N.; Nahidmobarakeh, B. Design of Permanent Magnet-Assisted Synchronous Reluctance Motors with Maximum Efficiency-Power Factor and Torque per Cost. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Ding, T. Study and Optimization of Line-Start Permanent Magnet Motors. Ph.D. Dissertation, Université Henri Poincaré, Nancy, France, 2011. [Google Scholar]
- Chen, X.; Wang, J.; Sen, B.; Lazari, P.; Sun, T. A High-Fidelity and Computationally Efficient Model for Interior Permanent-Magnet Machines Considering the Magnetic Saturation, Spatial Harmonics, and Iron Loss Effect. IEEE Trans. Ind. Electron. 2015, 62, 4044–4055. [Google Scholar] [CrossRef]
- Sriprang, S.; Nahid-Mobarakeh, B.; Takorabet, N.; Pierfederici, S.; Kumam, P.; Bizon, N.; Taghavi, N.; Vahedi, A.; Mungporn, P.; Thounthong, P. Design and control of permanent magnet assisted synchronous reluctance motor with copper loss minimization using MTPA. J. Electr. Eng. 2020, 71, 11–19. [Google Scholar] [CrossRef]
- Sriprang, S.; Nahid-Mobarakeh, B.; Takorabet, N.; Pierfederici, S.; Bizon, N.; Kuman, P.; Thounthong, P. Permanent Magnet Synchronous Motor Dynamic Modeling with State Observer-based Parameter Estimation for AC Servomotor Drive Application. Appl. Sci. Eng. Prog. 2019, 12. [Google Scholar] [CrossRef]
- Veeser, F.; Braun, T.; Kiltz, L.; Reuter, J. Nonlinear Modelling, Flatness-Based Current Control, and Torque Ripple Compensation for Interior Permanent Magnet Synchronous Machines. Energies 2021, 14, 1590. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Ψm | Permanent magnet flux | 0.138 Wb |
| Ld | Normal d-axis self-inductance | 288 mH |
| Lq | Normal q-axis self-inductance | 38 mH |
| Ldq | Mutual inductance | 4 mH |
| Symbol | Quantity | Value |
|---|---|---|
| Prated | Rated power | 1 kW |
| nrated | Rated speed | 1350 rpm |
| Trated | Rated torque | 7.07 Nm |
| np | Number of pole pairs | 2 |
| PF. | Power factor | 0.80 |
| Rs | Resistance (motor + inverter) | 3.2 Ω |
| Ld | Nominal d-axis Inductance | 288 mH |
| Lq | Nominal q-axis Inductance | 38 mH |
| J | Equivalent inertia | 0.017 kg m2 |
| Bf | Viscous friction coefficient | 0.008 Nm s/rad |
| Ψm | PMs flux linkage | 0.138 Wb |
| fs | Switching frequency | 16 kHz |
| Vdc | DC bus voltage | 400 V |
| Symbol | Quantity | Value |
|---|---|---|
| Governing Damping ratio 1 | 0.7 pu. | |
| Natural frequency 1 | 2000 Rad.s−1 | |
| Governing Damping ratio 2 | 0.7 pu. | |
| Natural frequency 2 | 20 Rad.s−1 | |
| Governing Damping ratio 3 | 1 pu. | |
| Natural frequency 3 | 200 Rad.s−1 | |
| Governing Damping ratio 4 | 1 pu. | |
| Natural frequency 4 | 20 Rad.s−1 | |
| Temax | Maximum Torque | +10 Nm |
| Temin | Minimum Torque | −10 Nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sriprang, S.; Poonnoy, N.; Guilbert, D.; Nahid-Mobarakeh, B.; Takorabet, N.; Bizon, N.; Thounthong, P. Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability 2021, 13, 9502. https://doi.org/10.3390/su13179502
Sriprang S, Poonnoy N, Guilbert D, Nahid-Mobarakeh B, Takorabet N, Bizon N, Thounthong P. Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability. 2021; 13(17):9502. https://doi.org/10.3390/su13179502
Chicago/Turabian StyleSriprang, Songklod, Nitchamon Poonnoy, Damien Guilbert, Babak Nahid-Mobarakeh, Noureddine Takorabet, Nicu Bizon, and Phatiphat Thounthong. 2021. "Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications" Sustainability 13, no. 17: 9502. https://doi.org/10.3390/su13179502
APA StyleSriprang, S., Poonnoy, N., Guilbert, D., Nahid-Mobarakeh, B., Takorabet, N., Bizon, N., & Thounthong, P. (2021). Design, Modeling, and Differential Flatness Based Control of Permanent Magnet-Assisted Synchronous Reluctance Motor for e-Vehicle Applications. Sustainability, 13(17), 9502. https://doi.org/10.3390/su13179502