1. Introduction
Electrical energy is an essential resource for beings. However, gas emissions from power generation using fossil fuels causes global warming and environmental pollution problems that cannot be overlooked any more. To resolve this problem, the literature research on the production of electric energy using renewable energy sources such as solar and wind power with microgrids is being actively conducted [
1,
2,
3]. Since a microgrid independently produces and supplies electrical energy using distributed energy sources, many studies on the management of microgrids have been conducted from the perspective of securing stability or improving effectiveness [
4,
5,
6,
7].
Microgrids can be classified into alternating current (AC) and direct current (DC) microgrids. DC microgrid systems can be designed with a simple power conversion step compared to AC microgrid systems. The simplified power conversion step operates with low power loss and is prone to control, as it does not require reactive power and frequency control [
8,
9]. In a DC microgrid system, as shown in
Figure 1, several converters are connected into a common bus (CB). Each converter is individually designed to operate seamlessly. However, in a microgrid system in which several converters operate simultaneously, unexpected interactions between converters may occur, which adversely affect other converters connected to the common bus, resulting in instability of the entire system [
10,
11,
12]. Therefore, there is a need for a method to prevent malfunctions between converters and improve the stability of the system.
Various methods such as Middlebrook’s stability criterion, Gain Margin Phase Margin (GMPM) stability criterion, the Opposing Argument Criterion (OAC), and Passivity-Based Stability Criterion (PBSC) have been proposed to determine stability of a microgrid system composed of several converters [
13,
14]. In these methods, the load converter is represented by the input impedance and the source converter is represented by the output impedance according to the direction of equalizing the converters constituting the system in the common bus. The stability of the system is determined using Middlebrook’s stability criterion among the various methods mentioned above. This method has the advantage of being able to intuitively determine the stability through the presence or absence of overlapping of input impedance and output impedance on the Bode plot.
Several studies have been conducted to solve the system stability problem caused by the unexpected impedance overlap between converters, and there are active and passive methods [
15,
16,
17,
18]. The active method secures stability by adding only a controller to the conventional circuit without any auxiliary circuits or device additions on power flow [
15,
16]. This method has the advantage of no power loss, and it can simply correct the damping effect. However, this method has disadvantages: as control complexity increases, and an additional sensing circuit is required. The passive method applies the damping effect to the conventional circuit by adding a passive element on the power flow [
17,
18]. Although this method has the disadvantage of causing some power loss, it has the advantages of simple implementation and no need for additional sensing circuits or control loops.
While the stability due to impedance overlap should be considered internally in the DC microgrid system, the stability problem that occurs in connection with the AC grid should be considered externally. As shown in
Figure 1, when the DC microgrid system is connected to the AC grid, the stability of the system becomes unstable due to the voltage and current distortion caused by the harmonics generated in the AC grid. Therefore, it is necessary to consider not only the unexpected interaction (impedance overlap) between converters, but also the effect of harmonics generated in the AC grid.
To solve stability issues, the proportional-resonance (PR) control method that reduces the harmonics effect from the AC grid is applied. In addition, passive damping methods such as resistor and inductor (RL) series, resistor and inductor (RL) parallel, and resistor and capacitor (RC) parallel are applied to reduce the malfunctioning interaction between converters. As mentioned above, the passive damping method has a disadvantage of increased loss compared to the active damping method; however, it has low control complexity and is relatively simple to apply to a pre-installed DC microgrid power converter. From this point of view, we performed a stability analysis based on passive damping. Each method was comparatively analyzed through a case study, and eventually, a method for selecting an appropriate passive damping was constructed.
For effective understanding, this paper is organized as follows: In
Section 2, the output impedance of the source converter and the input impedance of the load converter are derived through impedance modeling of the converters.
Section 3 includes the stability analysis and determination process of the system through impedance modeling.
Section 4 presents a case study applying passive damping and a PR controller to improve system stability.
Section 5 presents the simulation verification by using a simulation tool (PowerSim: PSIM), and
Section 6 describes the conclusions of this paper.
2. Impedance Modeling Using g-Parameter
A DC microgrid system consists of several converters, as shown in
Figure 1. The converters constituting the system are designed to operate stably during independent operation. However, when a stably operating converter is operated in conjunction, the stability of the system may deteriorate due to the interaction between the converters. Therefore, it is necessary to analyze the cause of the stability issue of the system. In this paper, to analyze the stability, impedance modeling for the converter composing the system is conducted using
g parameters. Through impedance modeling using
g parameters, it can be represented as an equivalent circuit for the converter, as shown in
Figure 2, where
g11 is the open circuit input admittance,
g12 is the short circuit current transfer function,
g21 is the open circuit voltage transfer function, and
g22 is the short circuit output impedance [
19]. The input and output transfer functions are obtained as shown in Equation (1).
When the DC microgrid system is simplified to a source converter and a load converter and applied to a cascaded system, the input and output relationship is expressed as Equation (2), which is shown in
Figure 3, where
is the open circuit transfer function of the source converter and
is the open circuit transfer function of the load converter, which do not affect the stability. The denominator composed of the input impedance and the output impedance contains the characteristic equation of the system. This term is defined as the minor loop gain,
TMLG, which is used to analyze the stability of the system.
2.1. Modeling of Converter Input Impedance
The input impedance to the converter is obtained from the common bus in the direction facing the input terminal of the load converter, and this is the same direction as
ZL_filter in
Figure 3 [
20]. The input impedance including the controller is as shown in Equation (3), and
Zx_filter and
Zy_filter constituting the input impedance are as shown in Equations (4) and (5), where,
ZLf and
ZCf are the impedances of the inductor and capacitor constituting the input filter, respectively; and
Zx and
Zy are the values composing the input impedance of the load converter without the input filter.
The loop gain
TL is as shown in Equation (6), where
Gid,L denotes the control to inductor current transfer function of the load converter [
21].
In this paper, the buck converter is used as the load converter, and the input impedance for the buck converter, including the input filter, is obtained by substituting Equations (7) and (8) into Equation (3).
2.2. Modeling of Converter Output Impedance
The output impedance to the converter is obtained through the Thevenin equivalent circuit in the direction facing the output of the source converter from the common bus [
22]. In this paper, the source converter is a buck converter, and the output impedance excluding the controller is
The output impedance includes the controller (Equation (10)), where
Ls,
Cs, and
Rs represent the passive elements constituting the source converter.
Ts represents the loop gain of the source converter (Equation (11)), where
Gvd denotes control to output transfer function,
Cs(
s) is the controller of the source converter, and
GM is the pulse width modulation gain.
2.3. Stability Analysis through Input and Output Impedance Modeling
Figure 4 shows the results of stability analysis using input impedance and output impedance. As can be seen from the figure, input and output impedance overlap does not occur in at 60% load, which means the system is stable according to Middlebrook’s stability criterion in Equation (12) [
23]. However, at a load of 80% or more, impedance overlap occurs, and the system becomes unstable. The impedance overlap is caused by the
LC resonance of the converter, and an additional method for reducing it is required.
3. Damping Method
The damping method is used to prevent ringing, oscillation, and divergence, which cause the system to become unstable. The damping method related to the phase margin and the gain margin is able to improve the stability of the system through appropriate parameter tuning. To reduce the unexpected impedance overlap that causes the unstable condition between converters due to the
LC of the converter, in this paper, a passive damping method, which is simple to design and implement, is applied [
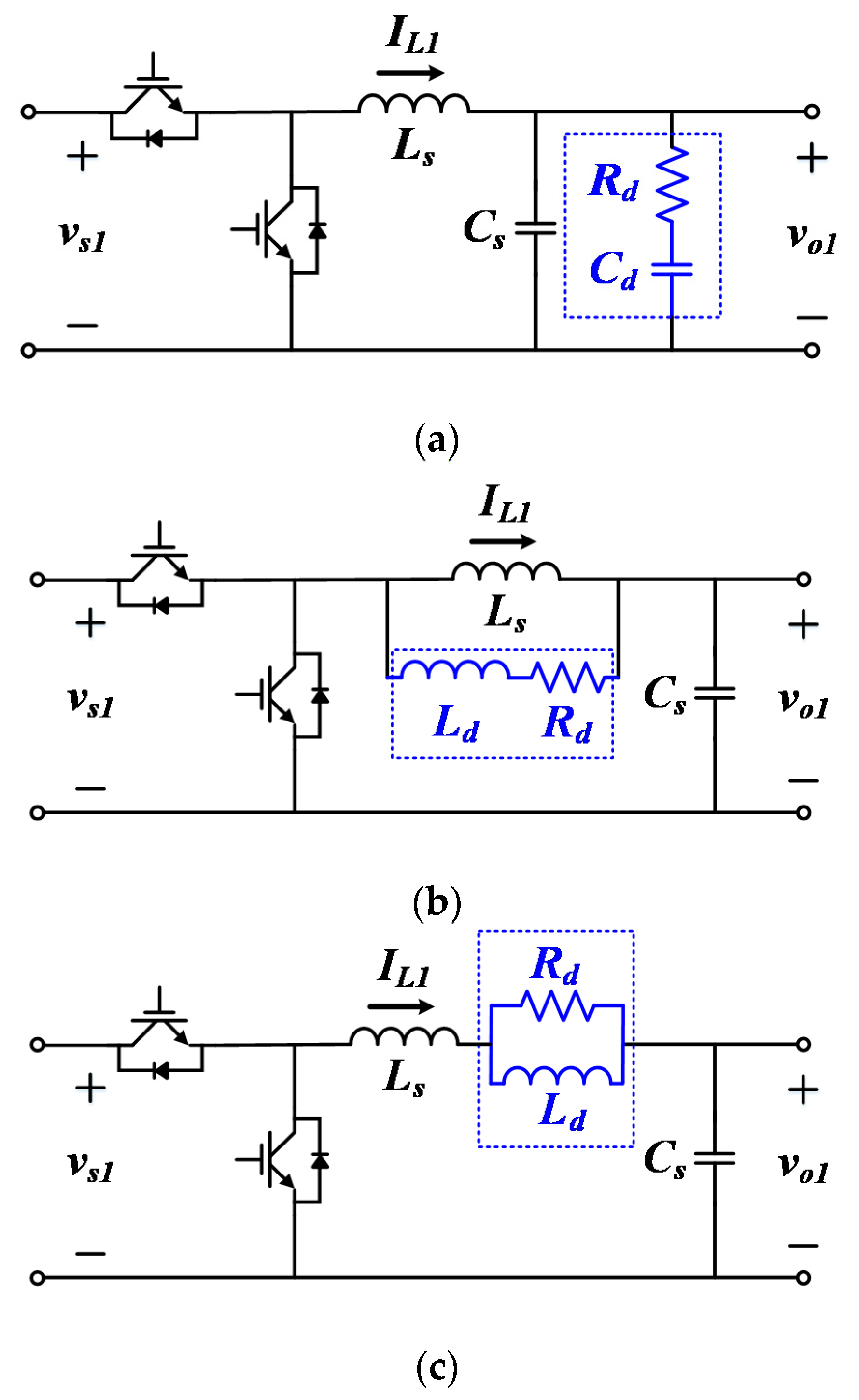
17]. The passive damping method is used for reshaping output impedance of the source converter, and the circuit diagram is as shown in
Figure 5. When passive damping method is applied, the formula of output impedance is modified by the added passive elements. As shown in
Figure 5a, when
RC parallel damping is applied, the output impedance changed such as in Equation (13); when
RL parallel damping is applied as shown in
Figure 5b, the output impedance is changed such as in Equation (14); and when
RL series damping is applied as in
Figure 5c, the output impedance is changed as shown in Equation (15).
The modified output impedance with
RC parallel,
RL parallel, and
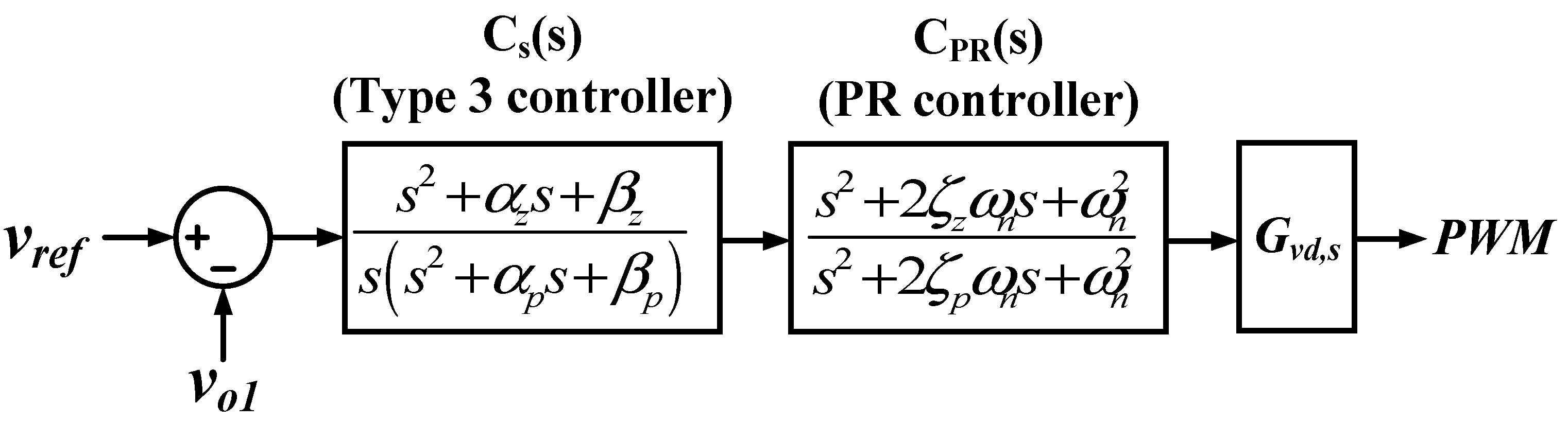
RL series damping is obtained by substituting Equations (13)–(15) into Equation (10). In addition, PR control is adopted to reduce the harmonics generated when the AC grid is interlinked. PR control is added to the existing source converter controller as shown in
Figure 6. The PR controller is expressed as Equation (16), and by setting the resonance frequency with
, and setting
and
, the magnitude at the resonance point can be varied, where
and
indicate a damping factor of the PR controller. The loop gain of the source converter to which the PR controller is added is denoted as Equation (17).
5. Simulation Analysis
To verify the proposed method mentioned in the previous section, the same circuit as in
Figure 3 was configured and simulation was performed. The parameters of the system are shown in
Table 1 and
Table 2. Simulations were conducted for 60% load, 80% load, and 100% load conditions. The simulation waveform without passive damping and PR control is shown in
Figure 16. Referring to
Figure 16, it operates stably under 60% load condition; however, it operates unstably under 80% and 100% load condition. To remove this unstable situation, passive damping and a PR controller were added, and
Figure 17 shows the result.
Figure 17a shows the waveforms when the PR controller and
RC parallel damping were applied,
Figure 17b shows the waveforms when the PR controller and
RL parallel damping were applied, and
Figure 17c shows the waveforms when the PR controller and
RL series damping were applied.
In the cases of
RC parallel and
RL series damping shown in
Figure 17a,c, it is seen that the input and output impedance overlapping phenomenon is removed, so voltage and current ripples are remarkably reduced, and harmonics are drastically reduced because of the PR controller. In the case shown in
Figure 17b, the current ripple is significantly reduced compared to the load of 80% or more in
Figure 16; however, the voltage ripple is almost the same.
From the FFT analysis results in
Table 3, it is seen there is a large harmonics reduction in decreasing order of
RL parallel damping,
RL series damping, and
RC parallel damping. Through the FFT analysis, the harmonic attenuation rate of each damping method was compared to the conventional method. The harmonics decreased by 85.3% when
RC parallel damping was applied, 93.3% when
RL parallel damping was applied, and 85.6% when
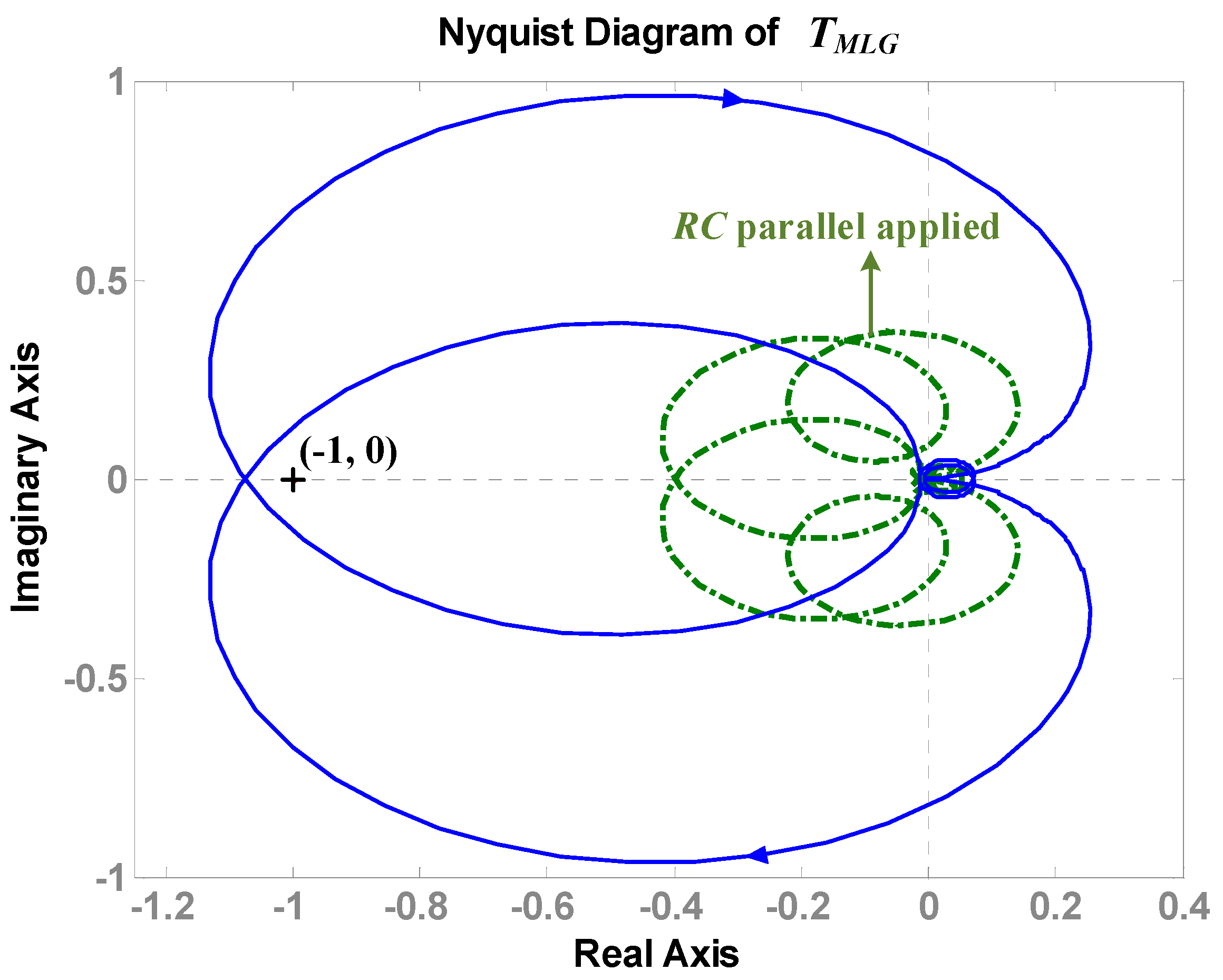
RL series damping was applied. The stability of the system was analyzed using
TMLG, which is the ratio of input and output impedances in a Bode plot [
12,
13]. As can be seen from the waveform, without applying the damping method in
Figure 18, the gain margin exceeds 0 dB. This means that the system is unstable because it corresponds to the unstable condition of Middlebrook’s stability criterion in Equation (12). On the other hand, when
RC parallel,
RL series, and
RL parallel damping methods were applied, the gain margin was below 0 dB at the same point, which means the system was stable. Through this waveform, it can be confirmed
RL parallel damping has relatively higher stability than when
RC parallel and RL series damping are applied.
Table 4 summarizes each damping effect through the simulation results. In short, by adopting the passive damping, the stability of the system is improved. Based on the results analyzed in this paper, if the passive damping method is applied to pre-installed microgrid power converters, it is possible to ensure the stability of the entire system according to the increase in the load and the facilities. In addition, if the active damping method described in the previous studies [
12,
15,
16] is applied to newly installed power converters, a synergy effect in terms of securing stability can be achieved and loss problem will also be alleviated.
6. Conclusions
This paper analyzed the situation in which the system becomes unstable due to the unexpected impedance overlap between the converters constituting the DC microgrid system and the harmonics generated from AC grid. In addition, with the analysis, this paper presented a methodology to improve the system stability. To analyze the system, the stability of the system was determined by applying Middlebrook’s stability criterion and Nyquist analysis in the frequency domain. As a result of the analysis, we confirmed that there is no abnormality in the stability of the system under light load conditions, whereas when the load increases, the system becomes unstable due to impedance overlap.
In order to improve the stability of the system, RC parallel, RL parallel, and RL series passive damping methods were adopted to remove impedance overlap, and PR control was also adopted for reducing the effect of harmonics from the AC grid. The difference of each damping method was analyzed by performing a case study. In the case studies, the eigenvalue was used when selecting damping parameters taking into account the stability and loss of the system. The performance of each damping method was compared using simulation. It was confirmed that the performance of RL parallel damping was good in the case of harmonic and current ripple reduction, and the performance of RC parallel and RL series was good in voltage ripple reduction. The harmonics decreased by 85.3% when RC parallel damping was applied, 93.3% when RL parallel damping was applied, and 85.6% when RL series damping was applied.
In short, passive damping mentioned in this paper is an effective method for improving the stability of grid-tied power supplies. Though this method has disadvantages including cost and loss, it has the advantage of simple implementation, having no need for additional sensing circuits or control loops, and can be applied to pre-installed power converters. The passive damping method analyzed in this paper was applied to an installed power converter, and it was possible to secure the stability of the microgrid, which is gradually expanding in scale.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}